拖拉机自动转向操纵控制器试验与仿真研究
2016-03-23张长龙尤文宽葛庆稳
任 玲,张长龙,尤文宽,葛庆稳
(石河子大学 机械电气工程学院,新疆 石河子 832000)
拖拉机自动转向操纵控制器试验与仿真研究
任玲,张长龙,尤文宽,葛庆稳
(石河子大学 机械电气工程学院,新疆 石河子832000)
摘要:转向操纵控制器执行效果的优劣决定了导航车辆工作的准确性和稳定性。为此,以开展试验测试和仿真研究的方法,对现有的转向控制平台进行试验测试,开发了双通道系数测定试验、比例系数测定试验和微分系数测定试验,目的是从软件的角度提升整个控制器的性能。同时,针对系统的被控对象进行建模,建立步进电机非线性SIMULINK仿真模型,并在此基础上提出了模糊PID控制器的构建思路,实现了步进电机模糊PID仿真。该研究为提高导航操纵控制器精度提供了思路。
关键词:拖拉机;自动转向;控制器;仿真
0引言
自动转向控制是实现农用车辆自动导航的关键技术之一[1]。拖拉机导航系统中,转向操纵控制系统根据上位机控制指令,驱动转向前轮转到指定角度。转向操纵控制系统执行效果的优劣决定了导航车辆工作的准确性和稳定性[1]。
拖拉机本身是一个具有大延迟、高度非线性、时变性和不确定性的复杂系统,而且农田地况较差,轮胎与地面作用过程复杂,难以建立精确的数学模型[2]。当被控对象受到参数摄动和外部干扰等不确定因素影响时,会降低系统的控制品质,出现诸如振荡加剧、过渡时间过长等缺点[2]。因此,有必要充分挖掘车辆模型所蕴含的车辆状态信息,选择合适的控制算法,以改善导航系统性能。
自动驾驶转向控制算法直接影响到拖拉机自动驾驶的行走精度,通过研究拖拉机转向操纵控制的实现方法,并对常用算法对比分析、改进和融合,以仿真研究和试验研究为主要研究手段,寻求提高操纵控制器动态响应特性的方法,为提高农用车辆导航控制系统的路径跟踪精度提供可靠保证。
1试验研究
1.1双通道系数测定
由于所用拖拉机的转向油缸是单边油缸,转动方向盘速度相等时,左转向速度和右转向速度不同。当拖拉机右转向时,转向油缸有杆腔进油,无杆腔回油,转向速度快一些;拖拉机左转向时,转向油缸无杆腔进油,有杆腔回油,转向速度慢一些。为解决左右转向速度不同这一问题,设计了双通道控制方法,通过添加一个控制系数,来实现左右转向对称。
试验方法是让步进电机带动加装的全液压转向器转向,设定不同的双通道系数,通过电脑接收由CAN发送过来角度传感器的值,并保存分析数据,找出左右转向所用的时间相等所对应的系数。
图1分别是起始转角为0°、目标转角为30°~30°、设置步进电机速度为0.3r/s、全液压转向器左转和右转速度相同时的数据图。由图1可知:拖拉机左右转向不对称,设置不同的系数,多次试验后,当右转速度/左转速度等于0.7时(双通道系数为0.7),左右转向对称,如图2所示。

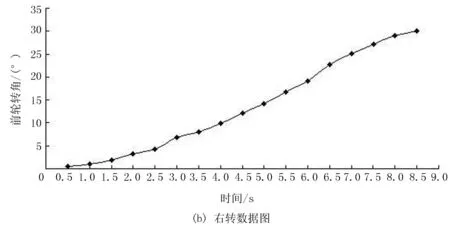
图1 转向数据图
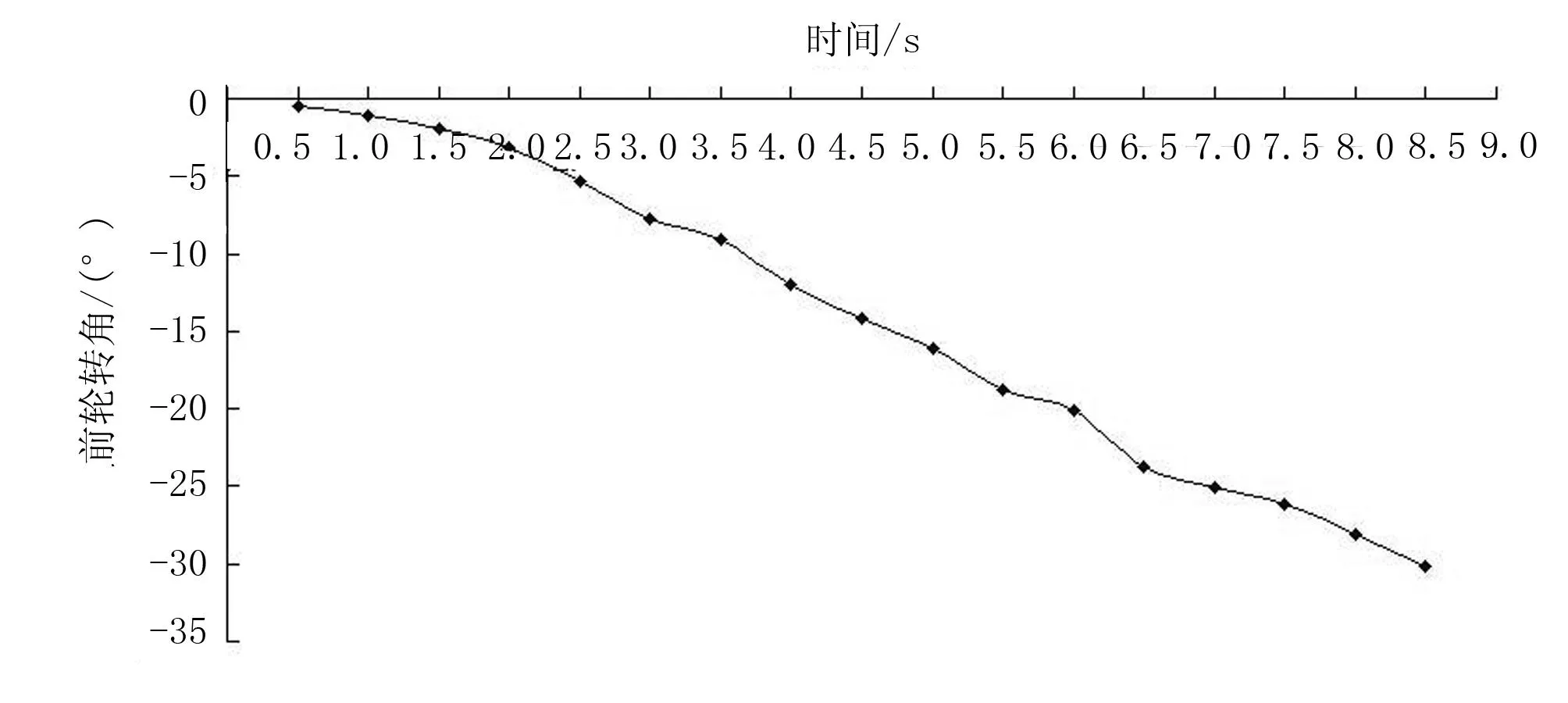
图2 双通道控制数据图
1.2比例系数测定
在控制自动转向时,为了提高控制的快速性、准确性和精度,希望当目标转角与当前转角的偏差较大时,具有较大的转向速度,以提高自动转向的响应速度;当目标转角与当前转角的偏差较小时,具有较小的转向速度,以避免自动转向超调。为此,通过多次试验,测试出最佳比例系数,以满足转向控制的快速性。
试验方法是先设置好一固定的目标转角,给定不同的比例系数,控制拖拉机自动转向。通过电脑接收由CAN发送过来角度传感器的值,并保存分析数据,观察转向的快慢和稳定性,以找出最佳比例系数。
图3为起始转角为0°、目标转角为30°、比例系数分别为20、50时的自动转向角度曲线。设置不同的比例系数,通过分析实验数据可知:比例系数越大,转向速度越快,但超调量也越大,当比例系数过大时,系统稳定性下降;通过多次多次试验,当比例系数为50时,转向效果最好。
1.3微分系数测定
单纯的比例控制会出现一定的超调量,微分控制可以减小一定的超调量;但是,微分控制过大会放大噪声,使控制系统稳定性下降。为提高自动转向的精度、减小超调量,需要确定最佳微分系数。
试验方法是:先设置好一固定的目标转角,在前面比例系数确定的基础上,通过设置不同的微分系数,控制拖拉机自动转向。通过电脑接收由CAN发送过来角度传感器的值,保存分析数据,观察转向的超调量大小和系统稳定性,找出最佳微分系数。系统控制稳定、超调量最小时所对应的微分系数就是最佳微分系数。
设置起始转角为0°,目标转角为30°,通过数据分析可得:微分控制减少系统控制的超调量,但影响较小;通过多次试验,当微分系数为20时,转向效果较好,如图4所示。
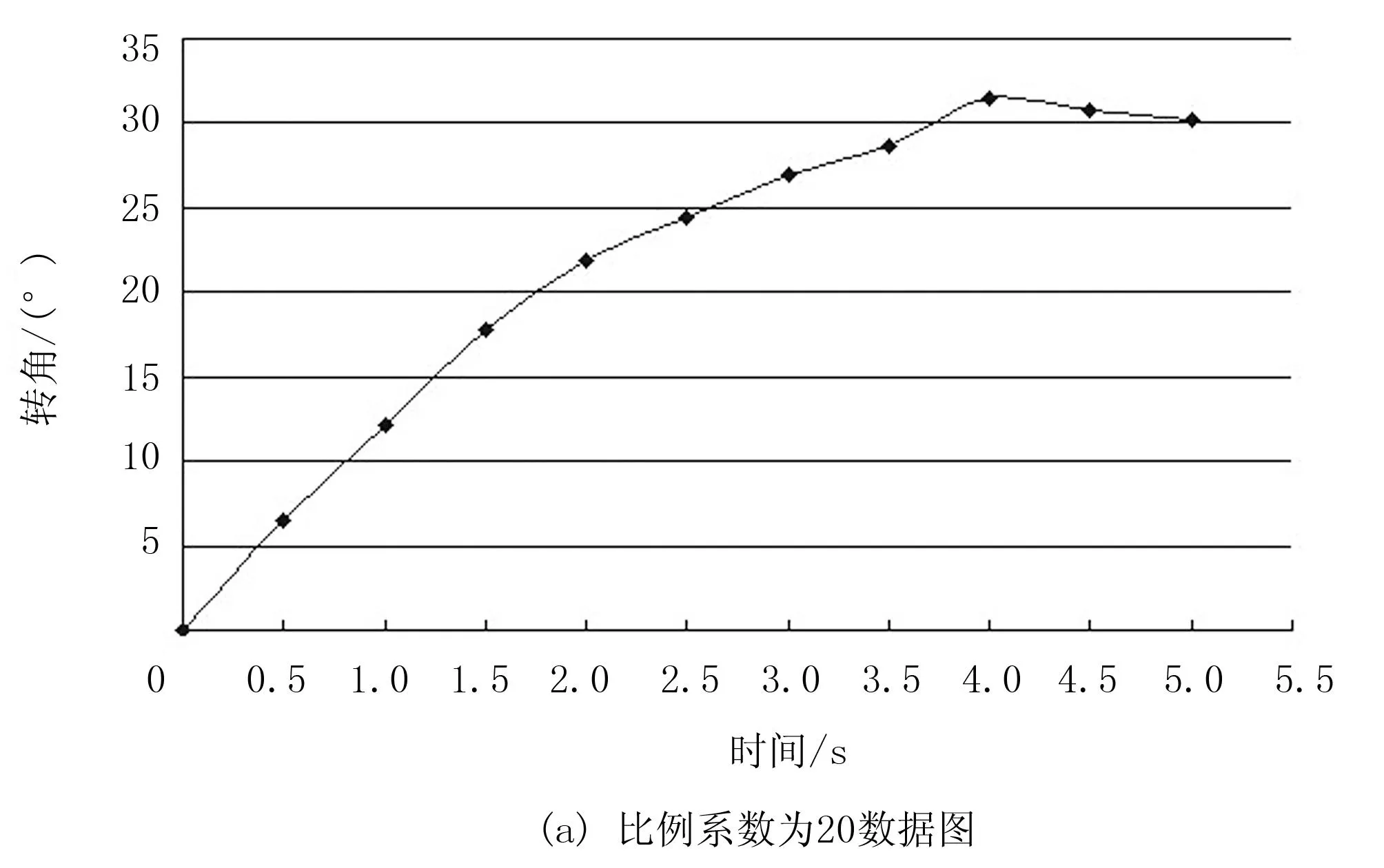

图3 比例系数测定数据图
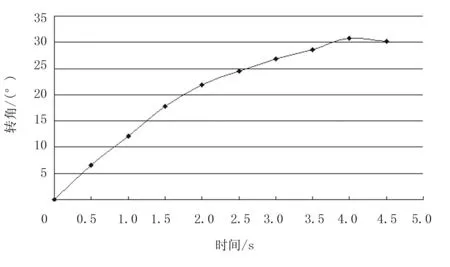
图4 微分系数为20数据图
2仿真研究
通过对系统进行建模,然后针对控制对象的性能要求和影响因素,选定控制器,并对控制算法扰动因素进行分析,优化模型。同时,对操纵控制器的响应速度和精度及转向控制方法的控制效果进行试验分析,从而提高转向操纵控制器的控制效果。
2.1步进电机SIMULINK建模
拖拉机转向系统的建模主要就是对步进电机的建模,转向控制算法直接去控制步进电机,使之快速、准确地输出需要偏移的角度。根据步进电机的特性,建立A相的电压方程为
其中,ia为 A相的电流;L为绕组电感;Km为反电势系数;R为绕组电阻;X为电机的转速;Nr为转子的齿数。
电机转矩方程为
其中,Te为电磁转矩;J为转动惯量;B为粘滞摩擦系数;TL为负载转矩[3]。
综上建立步进电机的数学模型, 其微分方程形式为

其中,各参数的选取为:L=1.5mH,R=0.55,J=4.5×10-5kg·m2,Km=0.19N·m/A,Nr=50,B=80×10-4N·m·s/rad。
从以上模型可以看出:步进电机为高度非线性被控对象,对步进电机进行SIMULINK仿真,建立仿真模型如图5所示。
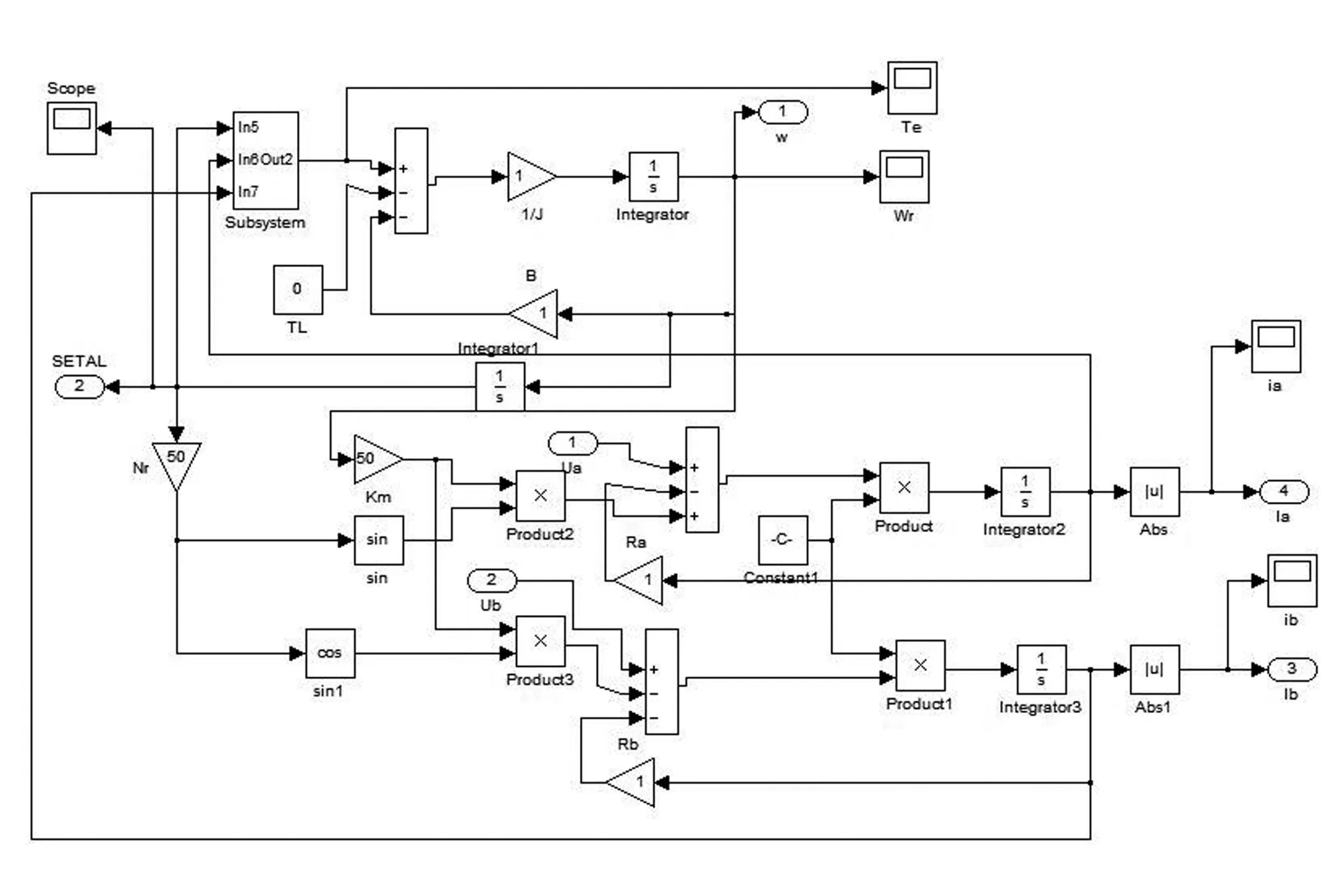
图5 步进电机SIMULINK仿真模型
此模型有2输入4输出,分别是:Ua、Ub为输入量;ia、ib、H、X为输出量。电磁转矩模块Te是子模块,后接输出电流的绝对值模块。利用SIMULINK把这个模型进行封装,从而得到了拖拉机自动转向操纵控制器步进电机的仿真模块。
2.2模糊PID控制器构建
2.2.1构建思路
模糊控制不依赖于被控对象的数学模型,具有设计算法简单、易于实现、适应能力好、抗干扰能力强等优点,但存在控制精度不高和静态余差等缺点。步进电机的内部结构与其他类型的电机不同,内部各控制变量不仅高度非线性,而且相互耦合,所以很难用简单的数学模型去表达。由于步进电机构成的控制系统存在着非线性、时变、干扰等特性,当外界环境发生变化时,被控对象的参数也会随之变化,采用固定的PID参数难以达到理想的控制效果。因此,结合PID 控制方法与模糊控制技术两者的优点,组成模糊 PID 控制技术,并将其运用于电机控制中,使系统具有较高的控制性能。
在步进电机控制系统中采用模糊PID控制可以充发挥模糊控制与PID控制各自的优势,用模糊控制去整定PID参数,建立模糊规则,通过推理对PID参数进行在线调整,从而提高转向操纵控制器的控制效果。控制原理如图6所示。

图6 模糊PID控制原理图
2.2.2模糊PID控制算法的建立与仿真
通过确定模糊语言变量,对各变量隶属函数进行确定,再通过控制规则的建立,进行模糊推理,可以得到模型中各个参数的取值。确定各变量kp、kI、kD隶属函数如图7所示。

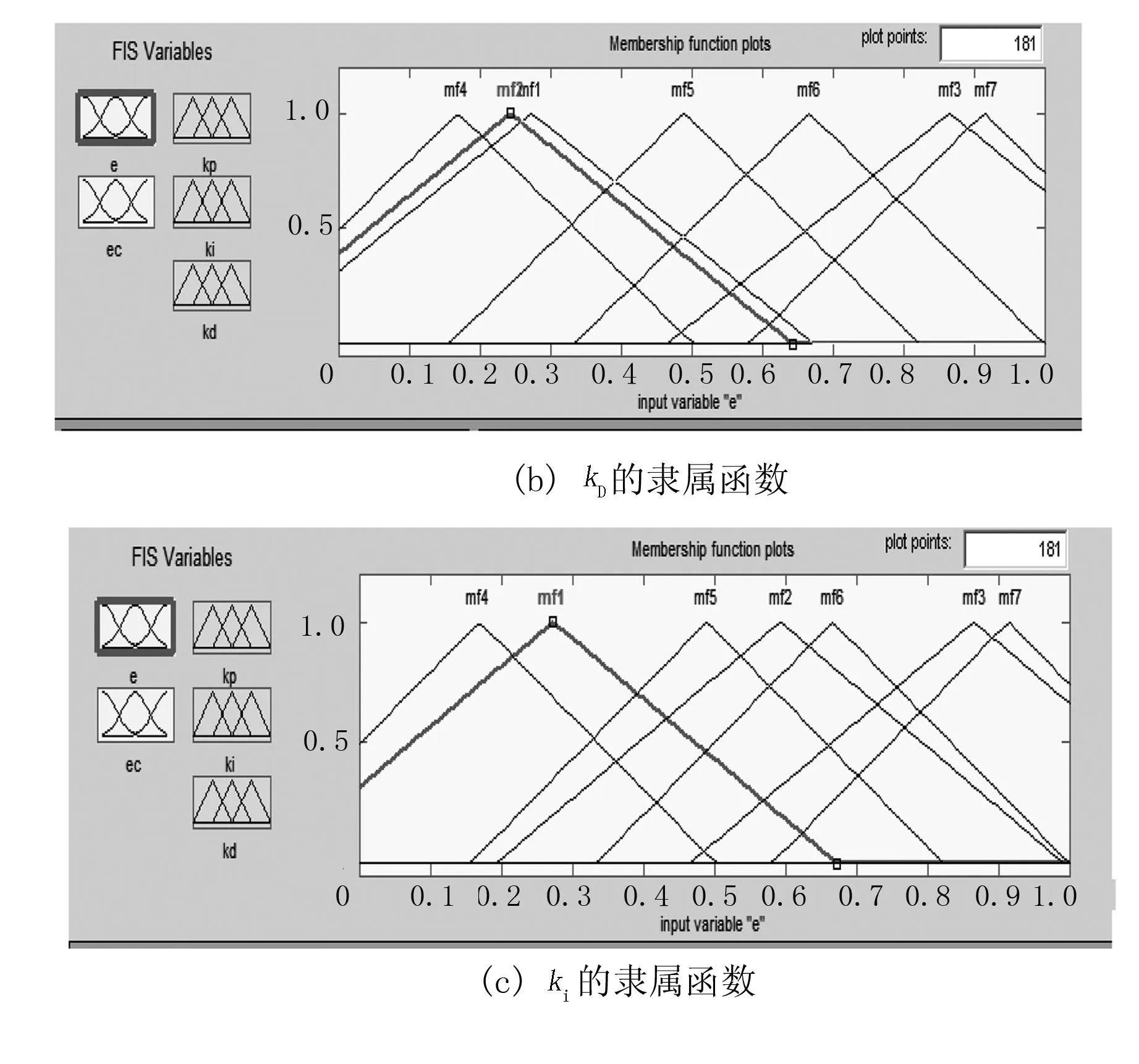
图7 各参数的隶属函数
采用Mamdani推理所得的推理结果,如图8所示。当e=0.5、ec=0.5,即给定值与测量值c(t)之差及较上一次失步数之差模糊化所形成值,它所对应的PID各参数需取值kp=0.469,ki=0.565,kd=0.45。

图8 推理结果图
在 MatLab/SIMULINK 中,将建立的模糊控制器仿真模型封装在 Fuzzy Logic Controller中,再将模糊控制模块与 PID 模块结合起来,建立的模糊 PID 仿真模型如图9所示。
所构建的模糊PID控制器可以使得系统具有反应时间短及超调量小的控制效果,可以有效地减少转向过程中的振荡现象,过渡时间过长等问题也得到了进一步改善。从波形分析可以看出:模糊PID控制通过对参数的在线调整,对提高控制精度起到了关键的作用。

图9 步进电机模糊PID控制器SIMULINK仿真图
3结论
从试验和仿真的角度对拖拉机自动转向操纵控制器进行了研究,从软件角度入手,开发设计了控制算法参数测试试验。同时,针对步进电机进行建模,利用SIMULINK得到了步进电机的仿真模型;并根据步进电机的特点,结合模糊控制的优势,提出了模糊PID控制器构建的思想,实现了步进电机模糊PID控制器仿真图。下一步主要从软件和算法的角度对控制效果进行精度分析试验测定,并通过仿真分析的方法对算法进行优化,寻求更合理的算法。
参考文献:
[1]胡炼,罗锡文,赵祚喜,等.插秧机电控操作机构和控制算法设计[J].农业工程学报,2009,25(4):118-121.
[2]罗锡文,张智刚,赵祚喜,等.东方红X-804拖拉机的DGPS自动导航控制系统[J].农业工程学报,2009,25(11): 139-145.
[3]肖云茂.基于模糊PID的步进电机控制技术研究[D].杭州:浙江工业大学,2008.
[4]李广.基于模糊PID符合控制的振动主动控制研究[D].南京:南京航空航天大学,2008.
[5]刘川,刘景林.基于Simulink仿真的步进电机闭环控制系统分析[J].测控技术,2009,28(1):44-48.
[6]陈文良,宋正河,毛恩荣. 拖拉机自动驾驶转向控制系统的设计[J].华中农业大学学报, 2005(10):57-62.
[7]王鹏. 汽车实时动力学仿真中转向回正特征建模方法研究[D].长春:吉林大学,2008.
[8]周建军,张漫,汪懋华,等.基于模糊控制的农用车辆路线跟踪[J]. 农业机械学报,2009,40(4):151-155.
[9]孙鹤旭,万文献,董砚.基于模糊调节的永磁同步电动机步进控制系统[J].微电机,2007,40(8):120-125.
Abstract ID:1003-188X(2016)04-0243EA
Test and Simulation Study of Tractor Automatic Steering Controller
Ren Ling, Zhang Changlong, You Wenkuan, Ge Qingwen
(Mechanical and Electrical Engineering College of Shihezi University, Shihezi 832000, China)
Abstract:The pros and cons of steering controller performs effect determines the navigation accuracy and stability of the vehicle work. In this paper, the existing steering control platform is tested with the method of experiments and simulation study. We developed a dual channel coefficient determination test, as well as the proportional coefficient of determination test and differential coefficient of determination test. The purpose is to enhance the performance of the controller from the angle of the software. Model of the controlled object is built, Stepper motor nonlinear SIMULINK simulation model is established, fuzzy PID controller is proposed, step motor fuzzy PID simulation is Realized .Providing new ideas of improving the navigation precision of manipulation controller .
Key words:tractor; automatic steering; controller; simulation
文章编号:1003-188X(2016)04-0243-04
中图分类号:S219.032.3
文献标识码:A
作者简介:任玲(1978-),女,江苏连云港人,副教授,硕士,(E-mail) 2542958572@qq.com。
基金项目:国家高技术研究发展计划项目(2013AA102307);石河子大学优秀青年项目(2013ZRKXYQ05)
收稿日期:2015-03-24
