宽型水田轮作业过程动力学仿真
2016-03-23杨红艳
杨红艳,杨 望,杨 坚,路 宏
(广西大学 机械工程学院,南宁 530004)
宽型水田轮作业过程动力学仿真
杨红艳,杨望,杨坚,路宏
(广西大学 机械工程学院,南宁530004)
摘要:宽型水田轮是前耕后驱微耕机的行走驱动装置,除具有驱动性能之外,还具有碾压碎土和搅动混土的作用,其设计参数对作业质量有大的影响。为此,以1WGQ4型微耕机为对象,采用有限元法和光滑粒子流体动力学方法(Smoothed particle hydrodynamics, SPH)相结合的方法,构建土壤-宽轮系统的动力学仿真模型,对其作业过程进行动力学仿真分析,在细微上研究其与土壤的作用机理。结果表明:随着宽轮的转动,轮叶与土壤的接触应力和轮叶水平推进力均呈现先增大后减小的变化趋势,但接触应力比水平推进力先达到最大值;滑转率不同,轮叶出现水平推力为零的位置不同;轮叶折角对驱动性能、碾压碎土和搅动混土作用有较大的影响。
关键词:宽型水田轮;作业过程;动力学仿真;机理
0引言
南方水田广泛应用微型水田耕整机械(简称微耕机)进行耕作,其水田驱动轮(简称水田轮)的结构参数和运动参数对微耕机的驱动性能影响较大。因此,国内外学者通过物理试验和理论分析对水田轮的作业性能影响参数进行了较多的研究,且取得了一定的成果[1-7]。
1WGQ4型微耕机是一种前耕后驱的新型微耕机,其水田轮为宽型水田轮(简称宽轮),宽轮的宽度和旋耕刀具宽度相同;除具有驱动性能之外,还具有碾压碎土和搅动混土作用,且其设计参数对作业质量影响较大;同时,其设计方法和一般的微耕机水田轮有较大的差别。目前,前耕后驱微耕机宽轮的设计方法未见有报导,因此开展宽型水田轮设计方法研究具有重要意义。本文以1WGQ4型微耕机的宽轮为对象,采用有限元法和光滑粒子流体动力学方法(SPH)相结合的方法[8-9],构建土壤-宽轮系统的动力学仿真模型,对其作业过程进行动力学分析,在微观上研究其与土壤的作用机理,为宽轮的优化设计提供依据。
1结构和工作原理
1WGQ4型微耕机主要由机架、发动机、减速箱、宽轮及旋耕刀具等组成,如图1所示。

图1 1WGQ4型微耕机
微耕机作业时,发动机输出的动力经减速箱和传动机构传输到宽轮和旋耕刀具,在宽轮的驱动作用下机组前进,微耕机前面的旋耕刀旋转切削土壤,且把切下的土块抛向挡泥板进行破碎。机组后面的宽轮除了具有驱动微耕机前进之外,还具有碾压大块土壤使其进一步破碎和搅动混土作用。
2动力学仿真模型
2.1模型的建立
1WGQ4型微耕机宽轮由连接圆板、辐条、轮圈及轮叶组成,轮叶为近似长方体形,如图2所示。
由于宽轮比土壤的刚度大得多,为了节省仿真计算时间,建模时将其整体建成刚体。同时,为了便于建模,将宽轮做以下简化:
1)省去连接圆板和辐条,仅保留轮圈和轮叶;
2)轮叶简化成长方体。
由于宽轮的对称性,只建其1/2模型,简化后宽轮的模型如图3所示。模型尺寸根据样机的实际尺寸确定:轮圈外直径450mm、内直径420mm、厚5mm;轮叶长120mm、宽72mm、厚6mm;轮叶倾角γ为45°。

图2 宽轮

图3 宽轮模型
由于水田的耕作层土壤(泥脚层)和硬底层土壤的硬度及物理特性参数差别较大,因此建模时土壤分上下两层建模,形状为长方体:上层土壤为泥脚层,其尺寸(长×宽×高)为1 550mm×195mm×100mm;下层土壤为硬底层,其尺寸(长×宽×高)为1 550mm×195mm×40mm。土壤外围设有刚性墙,约束土壤。建立的土壤-宽轮系统模型如图4所示。

图4 土壤-宽轮系统模型
2.2模型材料
宽轮选用SOLID164实体单元类型建模,定义为刚性材料,材料参数:密度为1.112×104kg/m3(因建模时省去了辐条和连接圆板,故适度增大材料密度,以保持其原有的质量),泊松比为0.27,弹性模量为0.2×1012Pa。
土壤材料采用LS-DYNA971中MAT_FHWA_SOIL材料模型,其针对实体单元且考虑了含水率、应变软化、应变率效应、孔隙比及孔隙水压力等的影响和单元删除[10]。为了解决土壤产生大变形时引起网格畸变,造成数值模拟计算失效的问题,土壤使用SPH单元进行建模。土壤的具体参数如表1所示。

表1 土壤参数
2.3网格划分和加载
仿真模型网格划分直接影响到模型的计算精度和运算时间。网格划分细,计算精度高,但运算时间长;网格划分过粗,计算精度低,易发生穿透。故在划分网格时,要合理匹配宽轮和土壤的网格尺寸,使其接触良好,相互作用过程不产生穿透现象,保证模型运算的精度。
Smart Size是ANSYS提供的一种强大的自动划分网格算法,有利于划分网格时生成合理的网格单元[11]。因此,本文采用Smart Size算法对宽轮进行自由网格划分,宽轮的单元数为12 010。土壤模型为长方形,形状规则,故土壤选择映射式网格划分方式进行网格划分:上层土壤的单元数为33 033,下层土壤的单元数为15 015。
1WGQ4型微耕机总质量为157kg,宽轮的质量为14kg。正常作业时,人通过扶手把施加在微耕机上的竖直向下的力约为210N,水平向后的力为140N。由于微耕机左右两个宽轮受力基本一样,且模型只建立了1/2宽轮,则1/2宽轮承受1/4的外力。因此,建模时,在宽轮的质量中心竖直向下施加410N的力,向后施加35N的力水平力。
由于正常作业条件下宽轮的转速为1.8rad/s,故建模时给宽轮施加1.8rad/s的转速。土壤和宽轮之间定义为面面自动接触,静摩擦因数为0.3,动摩擦因数为0.25[12]。
土壤在ANSYS/LS-DYNA中建模后,生成K文件,导入Ls-Prepost中,将土壤的有限元网格转化为SPH粒子,SPH粒子的疏密程度取决于有限元网格划分的大小。建立的土壤-宽轮系统动力学仿真模型如图5所示。

图5 土壤-宽轮系统动力学仿真模型
3模型的验证
3.1试验方法及设备
本文采用物理试验的方法对模型精度进行验证。试验时,测量空载条件下(微耕机的旋耕刀具离地不工作)1WGQ4型微耕机宽轮的下陷深度及滑转率后,与相同条件下的仿真试验结果比较验证模型的精度。试验设备:1WGQ4型微耕机(水田刀配置,传动比为1档38.5,2档23,倒档50),红外转速仪,卷尺,标杆。试验地:广西大学农场水稻田。
验证试验时,选微耕机1档速度行走,用直尺测量宽轮的下陷深度;采用红外转速仪测量与减速箱输入轴相连的皮带轮的转速,后由减速箱传动比(一档为38.5)计算出宽轮的实际转速。宽轮的滑转率采用传统方式测量,即微耕机行走一定距离L1时,数出宽轮转的圈数,后由宽轮转的圈数和半径计算出理论上微耕机行走的距离L,则滑转率为
(1)
物理试验重复6次。
3.2验证结果及分析
宽轮物理试验的平均下陷深度约为8cm,滑转率的试验结果如表2所示。
图6是仿真试验时宽轮的下陷深度曲线。由图6可知:宽轮运行稳定后,下陷深度在8cm附近波动,即平均值约为8cm,和物理试验的结果一致。由表2可知:物理试验的平均滑转率为3.18%,仿真试验的滑转率为3.10%,平均滑转率相对误差为2.5%。这表明,建立的土壤-宽轮系统动力学仿真模型精度高。
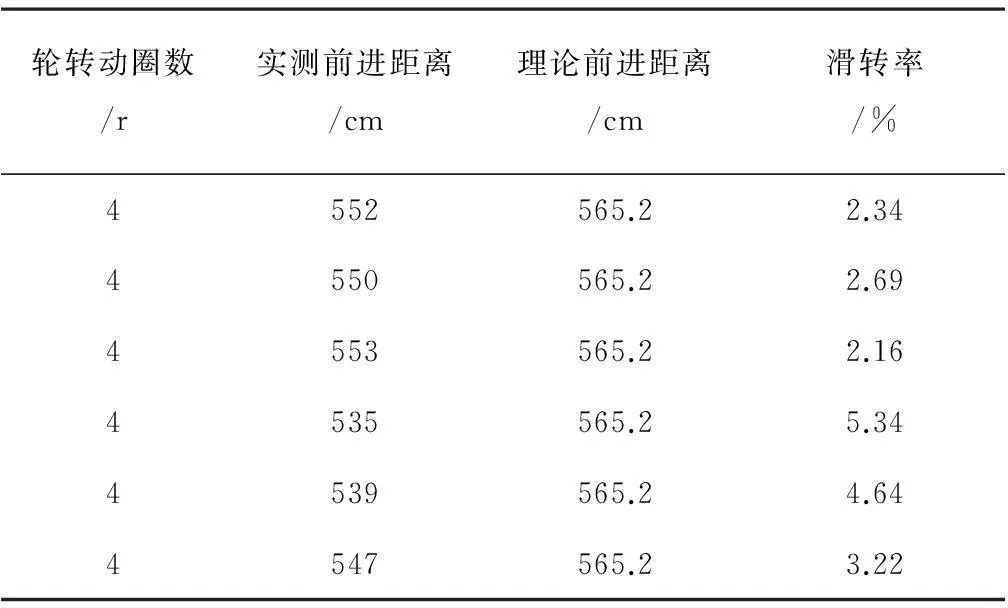
表2 滑转率试验结果

图6 下陷深度曲线图
4作业过程分析
4.1单轮叶
图7是在宽轮和土壤作用过程中单一轮叶与土壤作用过程的动力学仿真截图(滑转率3.10%),图8是单一轮叶的水平推力变化图。由图7可知:随着轮叶平面向下移动,轮叶对土壤的压力不断加强,轮叶与土壤的接触应力逐渐增大。当t=0.34s时,接触应力最大;当t>0.34s时,虽然轮叶的前端还继续下行,但轮叶的后端已开始上行,轮叶对土壤的压力开始减小,轮叶与土壤的接触应力逐渐减小;当t>0.76s时,轮叶虽然已不向下后方压土,但轮叶开始前推土壤,故轮叶与土壤间还存在接触应力。由图8可知:t在0~0.22s和0.76~0.94s区间时,轮叶水平推力为负值;t在0.22~0.76s区间时,为正值,且随时间的增加呈先增大后减小的变化趋势。其原因是:t在0~0.22s区间时,虽然轮叶平面向下移动,轮叶对土壤的压力不断加强,轮叶与土壤的接触应力逐渐增大;但轮叶倾角较小,且轮叶水平方向的运动速度较大,轮叶厚度方向产生向前推土作用,故轮叶的水平推力为负值。当t在0.76~0.94s区间时,轮叶叶面已向前运动,叶面对土壤产生向前的推压作用,故轮叶的水平推力为负值;当t在0.22~0.5s区间时,轮叶向下后方运动,向后对土壤的压力不断增大,且轮叶的倾角不断增大,故轮叶的推力不断增大,且为正值;当t在0.5~0.76s区间时,开始虽然轮叶前端还继续向下后方运动,轮叶倾角也在增大,但轮叶后端已上移较多,故轮叶对土壤的向后压力逐渐减小,轮叶推力逐渐减小。同时,由图7和图8可知:土壤应力(0.34s时最大)比轮叶水平推力(0.5s时最大)先达到最大值。当t=0.76s时,即当轮叶转到最低点再转17.5°时,轮叶的水平推力为零,比文献[10]研究结果的大4.5°。不同滑转率条件下的仿真分析表明:滑转率不同,出现水平推力为零的位置也不同,故出现与文献研究结果不一致的情况。

图7 单一轮叶与土壤作用过程的动力学仿真截图
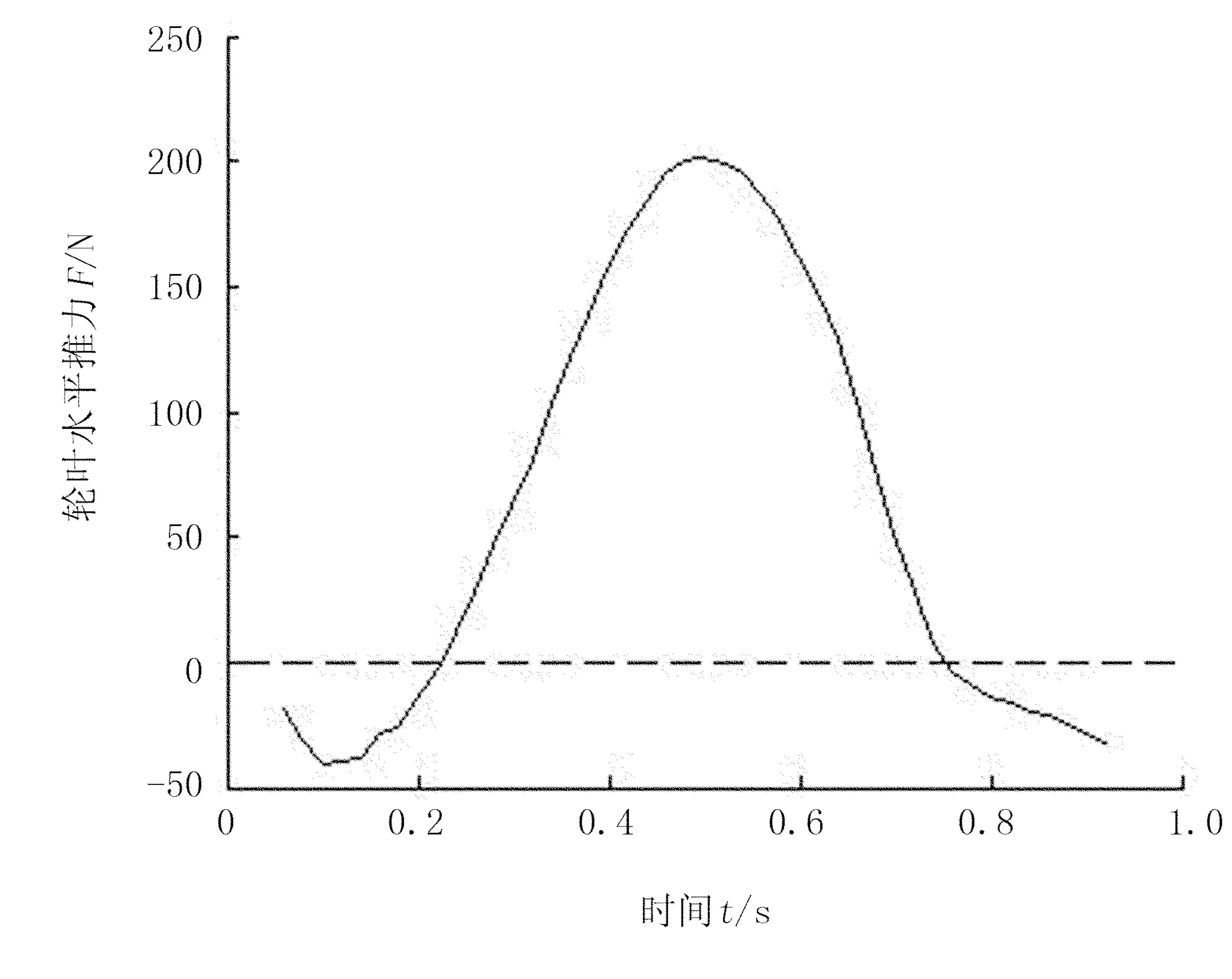
图8 单一轮叶的水平推力变化图
4.2宽轮
宽轮除具有驱动微耕机前进的作用之外,还具有碾压碎土和搅动混土作用。因此,为了在宽轮作业过程的动力学仿真图中便于观察宽轮的破碎土壤和搅动混土作用效果,把耕作层土壤分为两层(土壤材料参数不变)建模,使其产生不同颜色层(两层土壤粒子相互混合多,表示搅动混土能力强)。图9是宽轮对土壤的碾压过程仿真截图。其中,图9(a)是轮叶为直板型宽轮对土壤碾压过程的仿真截图,图9(b)是轮叶为折角型宽轮对土壤碾压过程的仿真截图。


图9 宽轮碾压痕迹
由图9(a)、(b)可知:轮叶带折角的宽轮比轮叶为直板型的土壤碾压破碎作用强,且耕作层的两层土壤相互混合的粒子数也比直板型的多,表明其搅动混土作用也强。两种宽轮动力学仿真表明:直板型轮叶宽轮的平均滑转率为3.28%,牵引功率为650.239W,而折角型轮叶宽轮的平均滑转率为5.97%,牵引功率为632.148W;直板型的打滑率小,牵引效率高,驱动性能好,表明折角因素对宽轮的驱动性能、碾压碎土和搅动混土作用影响较大。因此,为了使宽轮具有良好的驱动性能,且具有较强的碾压碎土和搅动混土作用,其轮叶折角的角度应进行优化设计。
5结论
1)采用有限元法和光滑粒子流体动力学方法 (SPH) 相结合的方法构建的土壤-宽轮系统的动力学仿真模型精度高,可用于宽轮作业过程分析。
2)随着宽轮的转动,轮叶与土壤的接触应力和轮叶水平推进力均呈现先增大后减小的变化趋势,但接触应力比水平推进力先达到最大值;且滑转率不同,轮叶出现水平推力为零的位置不同;轮叶转到最低点、再转17.5°角时,轮叶的水平推力为零,且滑转率不同时,出现轮叶水平推力为零的位置也不同。
3)轮叶折角因素对宽轮的驱动性能、碾压碎土和搅动混土作用影响较大,为使宽轮具有良好的驱动性能,且具有较强的碾压破土和搅动混土作用,轮叶折角的角度应进行优化设计。
参考文献:
[1]Arthur L. Fajardo, Delfin C. Suministrado, Engelbert K. Peralta, et al. Force and puddling characteristics of the tilling wheel of float-assisted tillers at different lug angle and shaft speed[J]. Soil and Tillage Research,2014,140:118-125.
[2]Wawan Hermawan, Minoru Yamazaki, Akira Oida. Theoretical analysis of soil reaction on a lug of the movable lug cage wheel[J]. Journal of Terramechanics, 2000, 37(2) : 65-86.
[3]C Watyotha, D Gee-Clough, V.M Salokhe. Effect of circumferential angle, lug spacing and slip on lug wheel forces[J].Journal of Terramechanics, 2001,38(1) :1-14.
[4]C Watyotha, V.M Salokhe. Development of a data acquisition system for measuring the characteristics of real time forces by cage wheels[J].Journal of Terramechanics, 2001,38(4):201-210.
[5]Yongzhi Zhang, Chuncheng Zuo, Yang Wang, et al. Study of a bionic paddy impeller inspired by buffalo hoof[J].Journal of Bionic Engineering, 2008,5(S1):79-86.
[6]C Watyotha, V.M Salokhe. Pull, lift and side force characteristics of cage wheels with opposing circumferential lugs[J].Soil and Tillage Research, 2001,60(3-4):123-134.
[7]陆华忠,罗锡文.水田驱动叶轮轮叶下土壤流动特性与动力性能研究[J].农业机械学报,2010,41(7):50-53.
[8]张永智,左春柽,孙少明,等.水田驱动叶轮仿生叶片机理数值模拟分析[J].农业机械学报,2008,39(11):176-179,202.
[9]邵耀坚,周大军,罗锡文.沿前刺孔行驶的水田叶轮动力学的试验研究[J].农业工程学报,1995,11(1):58-64.
[10]邵耀坚,罗锡文.水田耕整机驱动轮的设计和试验[J].农业工程学报,1992,8(2):80-87.
[11]钟江,蒋建东, 姜涛,等.基于光滑粒子流体动力学仿真的板结土壤深旋耕技术[J].机械工程学报,2010,46(19):63-69.
[12]杨望, 杨坚, 贾丰云,等.种植于红粘土的木薯块根挖掘作业数值模拟[J].机械工程学报,2013,49(9):135-143.
[13]LEWIS B A.Manual for LS-DYNA soil material model147[R].Department of Transportation: Federal Highway Administration,2004:10-13.
[14]胡国良,任继文,龙铭.ANSYS13.0有限元分析实用基础教程[M].北京:国防工业出版社,2012:108-110.
[15]中国农业机械化科学研究院.农业机械设计手册[K].北京:机械工业出版社,1988:171-192.
Abstract ID:1003-188X(2016)04-0029-EA
Dynamic Simulation of Working Process of Wide Type Paddy Wheel
Yang Hongyan, Yang Wang, Yang Jian, Lu Hong
(College of Mechanical Engineering, Guangxi University, Nanning 530004, China)
Abstract:Wide type paddy-field wheel is a driving device for walking of the micro-tillage machine which is tilling at first and then driving. Except driving performance, the wheel can roll broken soil and stir mixed soil. Its design parameters has great influence on operation quality. “1WGQ4” micro-tillage machine was used as the study object. Dynamic simulation model of soil -wide wheel system was established by using the finite element method and the smooth particle hydrodynamics method. Working process of the wheel was analyzed. And mechanism of interaction between the wheel and soil was studied at meso level. The results show that with rotation of the wheel, contact stress of the soil and lug of the wheel and horizontal propelling force of the lug increase first and then decrease. But the stress reached the maximum first. With the variation of slip rate, the location where the force is zero is different. Bending angle of the wheel has great influence on driving performance, rolling broken soil and stirring mixed soil.
Key words:wide type paddy wheel; working process; dynamic simulation; mechanism
文章编号:1003-188X(2016)04-0029-05
中图分类号:S222.3
文献标识码:A
作者简介:杨红艳(1989-),女,安徽亳州人,硕士研究生,(E-mail) zuihongyan1020@163.com。通讯作者:杨望(1984-),男,广西合浦人,副教授,硕士生导师,博士,(E-mail)yanghope@163.com。
基金项目:国家自然科学基金项目(51365005) ; 玉林市科技项目(玉市校科产201306802)
收稿日期:2015-03-21
