精准施药技术与装备发展现状分析
2016-03-23翟长远李瀚哲
张 波,翟长远,李瀚哲,杨 硕
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
精准施药技术与装备发展现状分析
张波,翟长远,李瀚哲,杨硕
(西北农林科技大学 机械与电子工程学院,陕西 杨凌712100)
摘要:精准施药以提高农药利用率、降低农药残留对食品和环境污染为目的,是施药发展的方向。为此,首先介绍了国内外精准施药技术发展现状,包括变量施药控制系统、控制算法、对靶施药控制技术和基于处方图施药技术现状分析。其次,分析了国内外精准施药装备发展现状:普遍应用于果园的风送施药机极大提高了工作效率及喷雾均匀性;风幕式喷杆喷雾机适用于大田喷雾,在减小劳动强度的同时提高了喷雾均匀性,降低了药液漂失量;循环喷雾机以回收利用沉积药液为目的,可提高药液的利用效率,减轻对环境的污染。最后,通过比较国内外相关领域的研究现状,指出国内精准施药技术研究不足,需要利用电子信息和自动化技术进一步提升精准施药装备水平。
关键词:精准施药;对靶施药;处方图;施药装备
0引言
目前,在我国的农业生产过程中,农药仍然是防治病虫草害的主要手段。据有关资料显示,农药的使用可使全世界每年挽回20%~25%的农产品产量[1-3]。但我国植保机械发展落后和传统施药方式不科学造成农药利用率低、农产品农药残留超标、环境污染等问题,成为制约农药使用的“瓶颈”[4]。
随着精准农业的发展,精准施药技术及相关装备成为解决以上问题的有效手段,是施药装备发展的方向[5-6]。精准施药的技术核心点在于获取农田小区域病虫草害信息,并根据其差异性采取变量施药技术,实现按需施药[3,5]。精准施药以显著提高农药利用率、极大减轻环境污染等为优势,已经得到了大力发展与广泛应用。对于施药技术与装备的研究,国外起步较早,发展较成熟。但近年来,随着国内外技术交流越来越频繁,我国精准施药技术及相关装备的研究也取得了可喜的成绩[6-8]。为此,本文就国内外精准施药技术与装备的发展进行了分析。
1精准施药技术发展现状
1.1变量施药控制系统及算法
变量施药主要基于控制器对实时信号进行采集,并利用一定控制算法对执行机构进行控制。王利霞[8]等基于ARM7系列的S3C44B0X微处理器,采集机具作业位置信息、行进速度、喷头入口压力及喷头喷药量信息,并根据网格位置对电动调节阀进行控制,实现按需施药。变量喷药控制系统结构框图如图1所示。
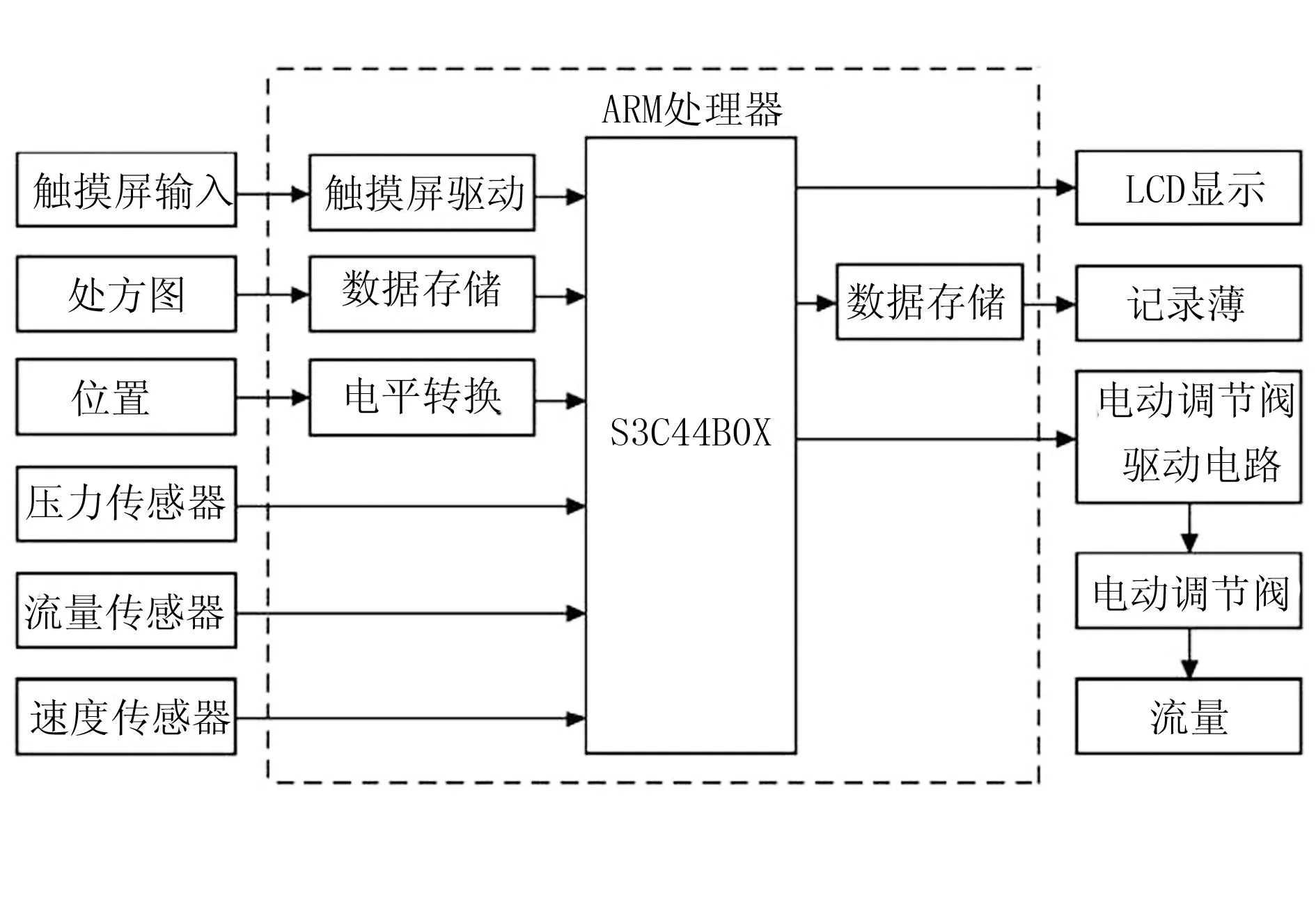
图1 变量喷药控制系统框图
黄胜[9]等基于AT89S52单片机设计了变量施药机的恒压变量控制系统,并建立了系统总管道药液压力的PID控制和施药量模糊控制模型,实现了施药机的恒压变量控制。张发军[10]等结合深圳隆瑞科技有限公司开发的6WC-30Y-G型车载喷雾机,针对智能喷雾决策条件的不确定性和模糊性,提出了一种基于模糊控制规则的决策方法模型,较好地满足了车载智能喷雾中实时施药控制要求。
1.2对靶变量喷雾控制技术
传统喷雾方式往往是连续喷雾,造成农药在地面上大量沉积,其甚至多于在靶标上的沉积量。针对果园植株种植不连续的情况,对靶变量喷雾控制技术可以达到更好的施药效果。对靶技术主要使用传感器进行靶标探测,如红外传感器、超声波传感器、图像传感器(CCD)等。翟长远[11]等针对幼树靶标难以探测的问题,基于红外传感器设计了幼树靶标探测器,其系统结构如图2所示。该探测器能同时探测到喷雾器两侧果树树干,并根据用户设置的喷雾宽度和延迟距离等参数,准确控制电磁阀的开闭进行对靶喷药,有效解决了低矮幼树靶标探测问题。
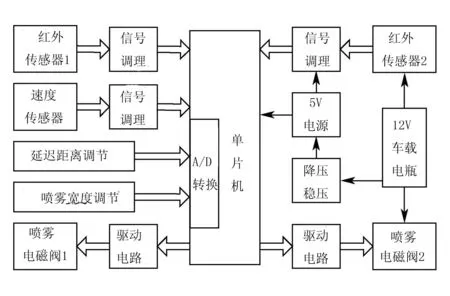
图2 幼树靶标探测器总体设计框图
刘金龙[12]等针对非连续种植的农作物连续施药造成环境污染的问题,设计了一种基于模拟正弦调制的红外靶标探测系统,可对一定株距的农作物进行自动对靶施药,有效减少了农药的浪费。李丽[13]等设计了对靶施药控制系统,利用红外传感器判断靶标有无,并辅佐绿色传感器判断靶标是否为绿色,达到了只对绿色农作物进行施药的目的,进一步减少了农药的浪费。
红外传感器探测面积小,存在因枝叶间隙造成开关误动作现象;而超声波传感器属于面探测,可有效地解决类似的问题。翟长远[14]等基于超声传感器搭建了靶标外形轮廓探测试验平台,并针对规则树冠和樱桃树进行了对靶探测试验,取得了很好的效果,证明了超声靶标探测的可行性。王万章[15]等采用超声波传感器在拖拉机行驶中检测树冠轮廓,由两个轮廓边缘确定树冠直径的方法在果树喷雾控制中能较精确地反映果树树冠的大小,为果树仿行喷雾控制和果园果树生长信息采集提供了技术方法。Solanelles[16]等将超声波传感器和比例调节阀应用于风送喷雾机上,根据测得的树宽控制喷雾流量,从而极大地节约了施药量。
CCD图像传感器成本虽然较高、处理速度较慢,但结合一定图像处理技术也可对作物病虫害信息进行探测。饶洪辉[17]等利用CCD图像传感器采集靶标信息,经过图像处理之后控制电机移动对靶标进行喷雾。Moshou[18]等利用CCD及光谱仪作为检测设备,采用一定图像处理算法有效判别出感染条锈病的小麦。Yang[19]等采用高光谱技术,利用主成分分析和ISODATA技术实现探测棉花根腐病的目的。Ashish Mishra[20]等研究了一种基于可见光和近红外光谱的光学传感器,可有效识别柑橘冠层病害。
1.3基于处方图的变量施药技术
在对果园或大田进行施药时,往往药量需求不均匀,需要根据植株病虫害程度进行按需施药。为此,可基于全球定位系统(GPS)、地理信息系统(GIS)生成作业处方图,控制器以处方决策数据为基准控制喷头喷药量,实现变量施药作业。M. Pérez-Ruizde[21]等基于GPS技术研发了一种风送果园喷雾机,如图3所示。该喷雾机可根据果园参数控制喷头流量,可节约19%喷雾量,减少15.5%的飘失量。黄伟峰[22]等采用嵌入式处理器S3C44B0X为主控芯片,完成了一个基于GPS和GPRS的果园喷雾嵌入式远程监测系统的设计,实现了对喷雾压力、流量和地理位置的实时监测,并对数据进行处理、显示和保存,为实现精确喷雾提供了依据。马景宇[23]等完成了一种应用于农田变量作业的农机控制系统,系统由GPS模块、GIS控制中心和农机作业模块组成。利用GPS卫星空间定位技术完成喷药农机实时的位置信息采集;利用GIS 技术实现了实时动态定位、可视化显示及变量施药控制,也为变量施肥控制系统、变量灌溉控制系统等的研制提供了有效的决策手段参考。
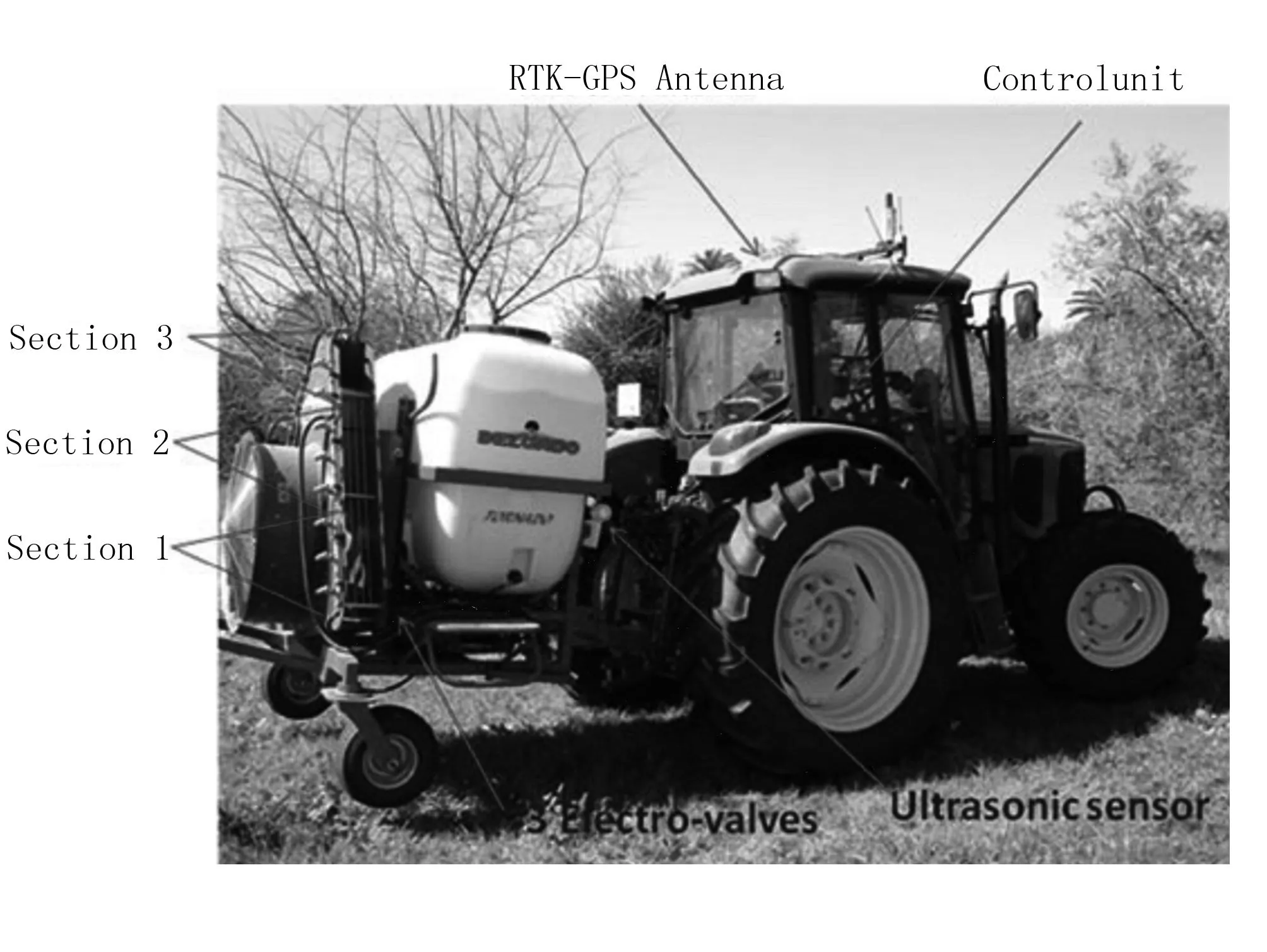
图3 风送喷雾机田间试验
2精准施药装备
植保机械和农药、防治技术一样被誉为化学防治的三大支柱之一[24]。我国早期主要采用传统的背负式手动喷雾器,不仅劳动强度大、作业效率低、农药分布不均匀,而且由手动机械进行施药时真正到达靶标上的药量不到喷洒量的20%,造成严重的浪费和环境污染。
针对以上问题,相关喷雾设备逐渐发展起来。其中,风送式喷雾机能将药液进行二次雾化,并利用风力送达至靶标,具有穿透力强、作业效率高、药液附着面积大等优点,得到了大力发展。李超[25]等根据目前国内葡萄园的种植条件,设计了一种小型机载立管式风送喷雾机(见图4),并对喷雾效果和防飘特性进行了测试,证明该喷雾机能提高药液附着率,同时减少农药漂失量。
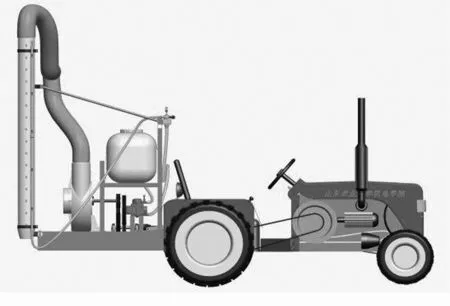
图4 立管风送式喷雾机三维装配图
徐莎[26]等针对传统喷雾机难以满足不同高度果树的喷雾要求,设计了喷雾角度可调的牵引式果园风送喷雾机,工作原理如图5所示。该喷雾机具有转向相反的离心风机和角度可调的导流风箱,可满足不同高度果树的喷雾要求。
图5 牵引式果园风送喷雾机的工作原理
尽管风送喷雾机具有穿透力强、效率高等优点,但在作业过程中往往存在喷雾参数选择不当、喷头类型与作物冠层特性不匹配等问题。为此,翟长远[27]等进行了风送喷雾雾滴粒径测量系统设计与影响因素试验,通过对喷头位置、喷雾压力和风速大小的精确控制,以不同喷头为研究对象,得出压力、风速与雾滴粒径大小的关系。随着计算机科学的快速发展,研究人员也将相关计算机仿真技术应用在对喷雾系统的分析中。A. Melese Endalew[28-29]等利用计算机流体动力学(CFD)建立了集成分布模型,分析了多种因素对单轴、双轴、多轴流风送喷雾机的喷雾漂失量的影响。孙国祥[30]等利用CFD离散相模型的粒子跟踪技术,研究了不同喷雾条件下的雾滴特性,建立了雾滴沉积量和沉积率的预测模型,为喷雾机的设计提供参考。
我国许多地方果园种植以低矮植株为主(如猕猴桃等),如果喷雾机体积过大、风力过强,会使得喷雾机无法进入果园进行作业,并且会造成行间喷雾干扰,由此研究人员设计了相应合适的喷雾机。丁素明[31]等针对一些果园行距较小、树冠交叉等问题,设计了一种自走式风送喷雾机。通过对雾滴覆盖率的测试证明,该机可满足病害防治的需要。邱威[32-33]等针对低矮密植果园设计了一种轴向进风、径向出风的圆环双流道风机,原理如图6所示。通过对风速、风量的测试,证明该风机适用于低矮密植果园。
d为树杆高度(m);R1为行距的1/2(m);R2为施药机机身的1/2(m)。
以上风送式喷雾机主要针对果园而设计,对于大田等作业环境,需要喷雾范围更大、喷雾更均匀、防飘失性能更好的机具。为解决以上问题,风幕式喷杆喷雾机得到很好的发展。周海燕[34]等为实现大田蔬菜地的高效施药,设计了一种轻便型自走式高地隙喷杆喷雾机,采用电动控制喷杆折叠,满足实际喷雾要求。韩红阳[35]等针对目前喷杆机架过重的问题,对机架进行了轻量化设计,并利用有限元分析软件Radioss进行静态分析,在减少质量的前提下,提高了强度与安全性。
为了进一步提升喷杆喷雾效果,研究人员设计不同试验对其喷雾参数进行了测试。蒋鹏飞[36]等在密闭室内测试了不同喷雾参数对风幕式喷杆喷雾机漂失量的影响,证明了喷头角度对其影响最为显著。张铁[37]等以超高地隙自走式喷杆喷雾机风幕系统为研究对象,研究了不同喷雾参数对雾滴沉积量、沉积均匀程度及漂移率的影响。试验证明:风幕出口风速直接决定以上指标及雾滴穿透性,喷雾压力影响沉积量,作业速度影响较小。燕明德[38]等利用相位多普勒粒子分析仪(PDPA)对不同条件下的风幕式喷杆喷雾流场进行了分析,测试系统如图7所示。结果表明:雾滴粒径随风幕出风口风速增大而减小,且分布更均匀;出风口与喷头水平距离越近,喷雾穿透性越好,漂失量越少。Gil, Emilio[39]等设计了测试平台研究喷杆喷雾机安装不同扇形喷头后的雾滴漂失量,为喷杆喷雾机的防飘设计提供参考依据。
1.开关阀 2.过滤器 3.电动机 4.智能流量计 5.压力表
虽然风送喷雾机提高了雾滴的分布均匀性、穿透性及作业效率,但在强大气流作业下仍会有大量雾滴脱离靶标沉积到其他部分,造成药液的巨大浪费与环境污染。如果能将未沉积在靶标的药液重新收集起来再利用,则会进一步节省药液,循环喷雾实现了这一目的。宋坚利[40]等设计了能将未沉积在靶标上的农药雾滴截留并回收利用的“∏”型循环喷雾机(见图8),药液回收率和冠层中药液沉积分布显著提高。张京[41]等对“∏”型循环喷雾机进行了防飘性能试验,通过使用质量分数为0.1%的荧光示踪剂BSF水溶液代替农药喷雾,待雾滴收集器和滤纸风干后收集,用酒精质量分数为6%的去离子水洗脱,然后用荧光仪测试溶液中的BSF含量。试验证明:“∏”型循环喷雾机比传统喷雾机飘失药液减少97.9%以上。
Ade, G[42]等研究了风送轴流循环喷雾机对未沉积雾滴的循环收集效果,测试结果显示:雾滴沉积在叶片上的部分约为总量87%,喷洒在土地上的部分约为总量的5%,效果远远好于传统喷雾机。Jamar, L[43]等进行了循环喷雾和传统喷雾机在分别使用ATR和TVI喷头后喷雾沉积量、覆盖率、漂失量和回收量性能对比试验,结果显示:两种喷雾机在不同喷头下的喷雾沉积量、覆盖率相差并不显著,而循环喷雾机可节约28%~32%的药液。
1.药箱 2.机架 3.罩盖宽度调节油缸
3结论
通过分析国内外精准施药技术与施药装备的研究现状,总体上可以看出国内外精准施药领域的研究均取得了长足进步。精准施药技术主要利用电子信息及自动化技术判断靶标有无、作物冠层大小、植株病虫害及长势等特征,最终实现按需喷药,在保证施药效果的同时极大地节约药液、减少对环境的污染。精准施药装备主要目标是提高喷雾均匀性和作业效率、减少药液在土壤沉积量及飘失量等,并在降低劳动强度的同时提高工作效率;但国内在基于图像传感器的作物病虫害探测方面等方面的研究水平与国外仍有一定差距。从精准施药技术与装备的发展现状可以看出:利用电子信息和自动化技术进一步提升精准施药装备水平已经成为施药装备的发展趋势。
参考文献:
[1]袁会珠,杨代斌,闫晓静,等.农药有效利用率与喷雾技术优化[J].植物保护, 2011(5):14-20.
[2]王万章,洪添胜,李捷,等.果树农药精确喷雾技术[J].农业工程学报,2004(6):98-101.
[3]翟长远, 朱瑞祥, 张佐经,等. 精准施药技术现状分析[J].农机化研究,2010,32(5):9-12.
[4]何雄奎. 改变我国植保机械和施药技术严重落后的现状[J].农业工程学报,2004(1):13-15.
[5]傅泽田,祁力钧,王俊红.精准施药技术研究进展与对策[J].农业机械学报,2007(1):189-192.
[6]张富贵, 洪添胜, 王锦坚,等.现代农药喷施技术及装备研究进展[J].农机化研究, 2011,33(2):209-213.
[7]邱白晶,李会芳,吴春笃,等.变量喷雾装备及关键技术的探讨[J].江苏大学学报:自然科学版,2004(2):97-101.
[8]王利霞,张书慧,马成林,等.基于ARM的变量喷药控制系统设计[J].农业工程学报, 2010(4):113-118.
[9]黄胜,朱瑞祥,王艳芳,等.变量施药机的恒压变量控制系统设计及算法[J].农机化研究, 2011,33(2):19-22.
[10]张发军,柴苍修.智能车载喷雾的模糊控制方法[J].农业工程学报,2007(7):104-108.
[11]翟长远,赵春江,王秀,等.幼树靶标探测器设计与试验[J].农业工程学报,2012(2):18-22.
[12]刘金龙,丁为民,邓巍.果园对靶喷雾红外探测系统的设计与试验[J].江苏农业科学, 2012(12):370-372.
[13]李丽,李恒,何雄奎,等.红外靶标自动探测器的研制及试验[J].农业工程学报, 2012(12):159-163.
[14]翟长远,赵春江,王秀,等.树型喷洒靶标外形轮廓探测方法[J].农业工程学报, 2010(12):173-177.
[15]王万章,洪添胜,陆永超,等.基于超声波传感器和DGPS的果树冠径检测[J].农业工程学报,2006 (8):158-161.
[16]Solanelles F, Escola A, Planas S, et al. An electronic control system for pesticide application proportional to the canopy width of tree crops[J].Biosystems Engineering, 2006, 95(4):473-481.
[17]饶洪辉,姬长英.基于机器视觉的作物对行喷药控制的研究[J].南京农业大学学报,2007 (1):120-123.
[18]Moshou D, Bravo C, West J, et al. Automatic detection of yellow rust′ in wheat using reflectance measurements and neural networks[J].Computers And Electronics in Agriculture, 2004, 44(3):173-188.
[19]Yang C H, Everitt J H, Fernandez C J. Comparison of airborne multispectral and hyperspectral imagery for mapping cotton root rot[J].Biosystems Engineering, 2010, 107(2):131-139.
[20]Mishra A, Karimi D, Ehsani R, et al.Evaluation of an active optical sensor for detection of Huanglongbing (HLB) disease[J].Biosystems Engineering,2011,110(3):302-309.
[21]Perez-Ruiz M, Aguera J, Gil J A, et al.Optimization of agrochemical application in olive groves based on positioning sensor[J].Precision Agriculture,2011,12(4):564-575.
[22]黄伟锋,洪添胜,俞龙,等.基于GPS和GPRS的果园喷雾嵌入式远程监测系统[J].农机化研究,2007(8):133-136.
[23]马景宇,潘瑜春,赵春江,等.基于GPS和GIS的农田变量喷药控制系统[J].微计算机信息,2006(4):85-87.
[24]刘建,吕新民,党革荣,等.植保机械的研究现状与发展趋势[J].西北农林科技大学学报:自然科学版, 2003 (S1):202-204.
[25]李超,张晓辉,姜建辉,等.葡萄园立管风送式喷雾机的研制与试验[J].农业工程学报, 2013(4):71-78.
[26]徐莎,翟长远,朱瑞祥,等.喷雾高度可调的果园风送喷雾机的设计[J].西北农林科技大学学报:自然科学版,2013(11):229-234.
[27]翟长远,王秀,葛纪帅,等.风送喷雾雾滴粒径测量系统设计与影响因素试验[J].农业工程学报,2012 (19):33-38.
[28]Endalew A M, Debaer C, Rutten N, et al. A new integrated CFD modelling approach towards air-assisted orchard spraying. Part I. Model development and effect of wind speed and direction on sprayer airflow[J].Computers and Electronics in Agriculture, 2010, 71(2):128-136.
[29]Endalew A M, Debaer C, Rutten N, et al. A new integrated CFD modelling approach towards air-assisted orchard spraying-Part II: Validation for different sprayer types[J].Computers and Electronics in Agriculture, 2010,71(2):137-147.
[30]孙国祥,李永博,汪小旵,等.背负式喷雾器雾滴分布特性的CFD模拟与试验[J].农业工程学报, 2012(20):73-79.
[31]丁素明,傅锡敏,薛新宇,等.低矮果园自走式风送喷雾机研制与试验[J].农业工程学报, 2013 (15):18-25.
[32]邱威,丁为民,傅锡敏,等.果园喷雾机圆环双流道风机的设计与试验[J].农业工程学报,2012 (12):13-17.
[33]邱威,丁为民,汪小旵,等.3WZ-700型自走式果园风送定向喷雾机[J].农业机械学报,2012 (4):26-30,44.
[34]周海燕,刘树民,杨学军,等.大田蔬菜高地隙自走式喷杆喷雾机的研制[J].农机化研究,2011,33(6):70-72.
[35]韩红阳,陈树人,邵景世,等.机动式喷杆喷雾机机架的轻量化设计[J].农业工程学报,2013 (3):47-53,293.
[36]蒋鹏飞,毛罕平,李成,等.喷雾参数对雾滴飘移性能影响的试验研究—基于风幕式喷杆喷雾机[J].农机化研究, 2014,36(4):127-131.
[37]张铁,杨学军,董祥, 等.超高地隙风幕式喷杆喷雾机施药性能试验[J].农业机械学报,2012(10):66-71.
[38]燕明德,贾卫东,毛罕平,等.风幕式喷杆喷雾雾滴粒径与速度分布试验[J].农业机械学报,2014(11):104-110.
[39]Gil E, Balsari P, Gallart M, et al. Determination of drift potential of different flat fan nozzles on a boom sprayer using a test bench[J].Crop Protection, 2014, 56:58-68.
[40]宋坚利,何雄奎,张京,等.“Π”型循环喷雾机设计[J].农业机械学报,2012(4):31-36.
[41]张京,宋坚利,何雄奎,等.“Π”型循环喷雾机防飘性能试验[J].农业机械学报,2012(4):37-39,125.
[42]Ade G, Molari G, Rondelli V. Vineyard evaluation of a recycling tunnel sprayer[J].Transactions of the Asae,2005,48(6):2105-2112.
[43]Jamar L,Mostade O,Huyghebaert B,et al.Comparative performance of recycling tunnel and conventional sprayers using standard and drift-mitigating nozzles in dwarf apple orchards[J]. Crop Protection,2010,29(6):561-566.
Abstract ID:1003-188X(2016)04-00001-EA
Development Status Analysis of Precision Pesticide Application Techniques and Equipments
Zhang Bo, Zhai Changyuan, Li Hanzhe, Yang Shuo
(College of Mechanical and Electronic Engineering, Northwest A&F University, Yangling 712100, China)
Abstract:Precision spraying, as the developing trend of spraying, is aimed at improving pesticide utilization ratio, reducing the food and environment pollution caused by pesticide residue. Firstly, the domestic and overseas development status of precision spraying technology, the status of variable-rate spraying control system and its algorithm, target spraying technology and spraying based on prescription map were introduced. Secondly, the domestic and overseas development status of precision equipment was analyzed. Air-assist sprayer widely used in orchard can improve work efficiency and spray uniformity greatly. Air-assist boom sprayer generally applied to field, can improve spray uniformity, reduce pesticide drift and reduced labor intensity. Recycling tunnel sprayer aimed to recycle deposition liquid, can improve pesticide utilization and reduce environment pollution. Finally, it was pointed that the research of precision spraying was not enough in china comparing with the overseas development status, and information and automation technology is needed to further enhance precision spraying equipments.
Key words:precision spraying; target spraying; prescription map; sprayer
文章编号:1003-188X(2016)04-0001-05
中图分类号:S233.3
文献标识码:A
作者简介:张波(1992-),男,四川乐山人,硕士研究生,(E-mail) zhangbo_609@163.com。通讯作者:翟长远(1982-),男,河南驻马店人,副教授,硕士生导师,博士,(E-mail)zhaichangyuan@163.com。
基金项目:国家“863计划”项目(2012AA101904);国家自然科学基金项目(31201128);西北农林科技大学科技创新项目(2452013QN070)
收稿日期:2015-03-13
