小区自走式旋耕机的设计优化与试验研究
2016-03-23王英雪赵立军刘环宇周福君
王英雪,赵立军,刘环宇,李 强,周福君,何 堤
(东北农业大学 工程学院,哈尔滨 150030)
小区自走式旋耕机的设计优化与试验研究
王英雪,赵立军,刘环宇,李强,周福君,何堤
(东北农业大学 工程学院,哈尔滨150030)
摘要:以小区自走式旋耕机为研究对象,对其结构组成及工作原理进行了分析,并针对玉米根茬地旋耕作业的要求,采用Box—Behnken中心组合试验设计方法对玉米根茬地进行了较为详尽的田间试验。结果表明:当旋耕机前进速度为0.6m/s、刀轴转速为224r/min、刀齿齿数为11片时,旋耕深度达到13cm,玉米根茬破碎率达到95%以上,基本满足了小区作业要求。
关键词:小区旋耕机;自走式;参数优化
0引言
旋耕机是一种以拖拉机为行走和作业动力,靠一组安装于水平轴上的弯刀回转来实现土壤耕耘作业的农机具,在我国农村普遍使用[1]。旋耕机械具有实用性强、操作方便、应用范围广等特点,与人工相比达到了省时、省力的功效,与其它机械相比旋耕机具有良好的切土性能和碎土能力[2]。日本早在1975年就已经大面积推广使用旋耕机作为主要耕地机械,而相比之下我国旋耕机发展速度相对较慢[3-4]。我国在农业生产中引进旋耕机大多用于蔬菜种植、大田作业、水稻整地及旱田灭茬等[5]。
旋耕机的有效使用能够增加土壤有机质的含量,从而能达改善土壤的作用[6]。相关研究表明:每公顷还田根茬干物质达到1 200kg时,相当于施加了大量的农家肥,给农户带来了一定经济效益,同时能够很好地改善土壤环境,增加耕层的透气性、透水性,为土壤微生物生存创造了良好的条件[7-8]。
国内在旋耕机方向早已进行了大量的工作研究,主要针对大田作业旋耕机械,对小区自走式旋耕机还少有研究[9]。为此,以自走式旋耕机的关键部件旋耕刀为研究对象,研究各个参数对土壤耕深及根茬破碎率的影响规律。
1主要结构参数
旋耕机主要由发动机、机架、旋耕工作部件、限深机构、传动链及行走轮等组成,如图1所示。其工作原理是:将发动机的动力经链传动直接传递给刀辊轴,驱动轴上旋耕刀片旋转,进而完成耕地、松土、灭茬等作业环节[10-11]。小区自走式旋耕机工作的主要技术参数如表1所示。
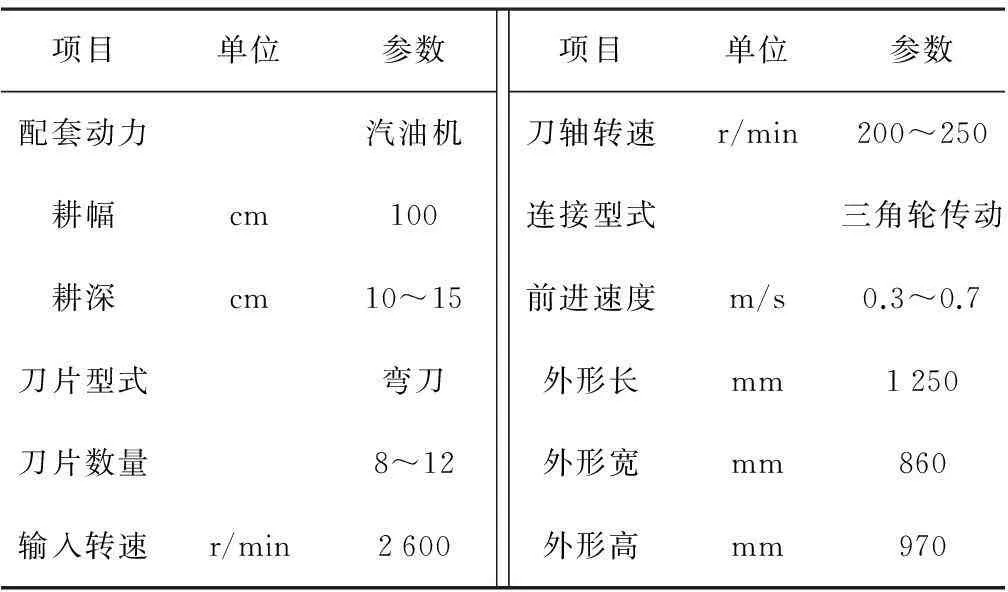
表1 主要技术参数
小区自走式旋耕机配套动力输出由汽油发动机完成,前进速度在0.3~0.7m/s范围内可调,最大更耕幅100cm;耕深范围主要靠阻力铲柄上孔眼的位置进行上下调节,范围设定值为10~15cm;旋耕刀刀片以弯刀为主,设置每组刀片数量为8~12片。
2旋耕机原理及关键部件分析
2.1旋耕机工作过程
工作时,通过汽油机输出动力,带动刀轴旋转进行旋耕作业,通过调节旋耕机后端支撑杆产生阻力,随着支撑杆深浅的调节使弯刀有不同的转速,从而得到不同的耕深、生产率和碎土质量[12]。旋耕机耕作原理示意图如图2所示。

1.汽油机 2.机体 3.操纵手柄 4.离合器

图2 旋耕机耕作原理示意图
2.2耕幅确定
自走式小区作业旋耕机耕幅取决于汽油机动力输出功率和旋耕作业时单位幅宽功耗。如果选择幅宽过大,将导致发动机工作过载,影响工作效率且增加人工的劳动强度;选择幅宽过小,会导致工作效率过低[13]。因此,应在一定程度上选择合适的幅宽,进而保证主机功率的充分利用。实际中幅宽计算公式为
B=(0.260.29 )N
(1)
其中,N=3.5kW,即发动机的额定功率。
通过计算可知:取值范围为0.91~1.02m。为计算方便,本设计选取B=1m。
2.3刀轴转速选定
自走式小区作业旋耕机的旋耕刀设计主要采取螺旋线布置方式,既可以保证良好的碎土效果,又能在一定程度上减少由作业带来的振动,增加了农民作业时的方便性。刀轴转速一般设定在200~250r/min范围内,随着土壤性质、土壤含水量、土壤根茬而变化:对于性质较粘着土壤,刀轴转速会相应偏低;而针对性质稀松土壤,刀轴转速可偏高[14]。
3田间性能试验
3.1试验地点及仪器
试验地点为东北农业大学小区玉米试验田;试验材料为秋收后残留玉米根茬(取自小区玉米试验田),平均茬高4.3cm,根茬残存茎秆直径为2.43cm,平均株38.2cm,茎秆含水率30%;试验仪器:耕深测量尺、5m皮尺、钢尺、游标卡尺、烘箱及电子秤等。
3.2技术要求
由于东北地区情况较为特殊,玉米根茬较南方地区粗大,利用人工清理不仅不宜刨除、切碎而且浪费大量人力及时间。本文在对旋耕机小区作业情况进行大量研究的前提下,针对小区玉米根茬粉碎旋耕机械提出了以下技术要求:①旋耕后耕深值应达到10cm以上;②粉碎后的根茬要直接覆盖在土壤表层或与土壤直接混合,根茬破碎率要达到90%以上[15]。
3.3评价指标
耕深值具体测试方法为:在东北农业大学小区玉米试验田随机选取6个测试点,各耕深点间距大于1m;旋耕后用耕深尺测量各耕深点深度。耕深值计算公式为
(2)
其中,n为测试点。
在测试旋耕深度的同时,在旋耕区域随机选取0.5m×0.5m的耕地,旋耕机耕作后的根茬按长边小于5cm、大于等于5cm、完整(60%未被粉碎)根茬划分,并测出其总质量。其计算公式为
(3)
式中ki—测试点内5cm以下根茬的质量;
k—测试点内根茬的总质量。
3.4试验方法
本试验根据旋耕机关键部件设计给定各因素取值范围,确定影响耕深及根茬破碎率的主要因素为旋耕机前进速度、刀轴转速、刀齿齿数,取值范围为前进速度0.3~0.7m/s、刀轴转速为200~250r/min、刀齿齿数8~12片。采用响应曲面法进行实验设计,因素水平表如表2所示。
3.5田间试验
试验以自走式小区旋耕机前进速度、刀轴转速、刀齿齿数为主要因素,采用Box—Behnken试验设计对其进行优化,结果如表3所示。
3.6试验结果分析
从表3可以看出:各因素对耕深影响均达到了10cm以上,满足了旋耕作业要求。利用Design Expert7.0软件对表3中根茬破碎率试验数据进行二次多元回归拟合,得到根茬破碎率的回归方程为
Y=94.74+0.62x1-0.28x2+1.82x3-
4.96x12-4.66x22-2.86x32-
2.87x1x2+4.48x1x3+1.38x2x3
回归决定系数R2=0.944 2,修正决定系数为0.872 4。这说明,试验误差相对较小,回归模型显著,能够很好地描述试验结果,使用该方程代替真实的试验点进行分析是可行的。根茬破碎率回归统计分析结果如表4所示。
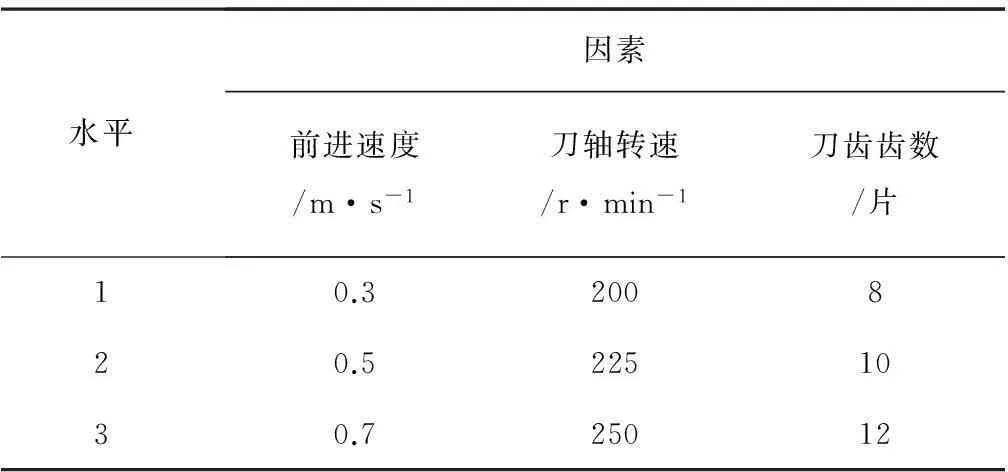
表2 响应面因素水平编码表
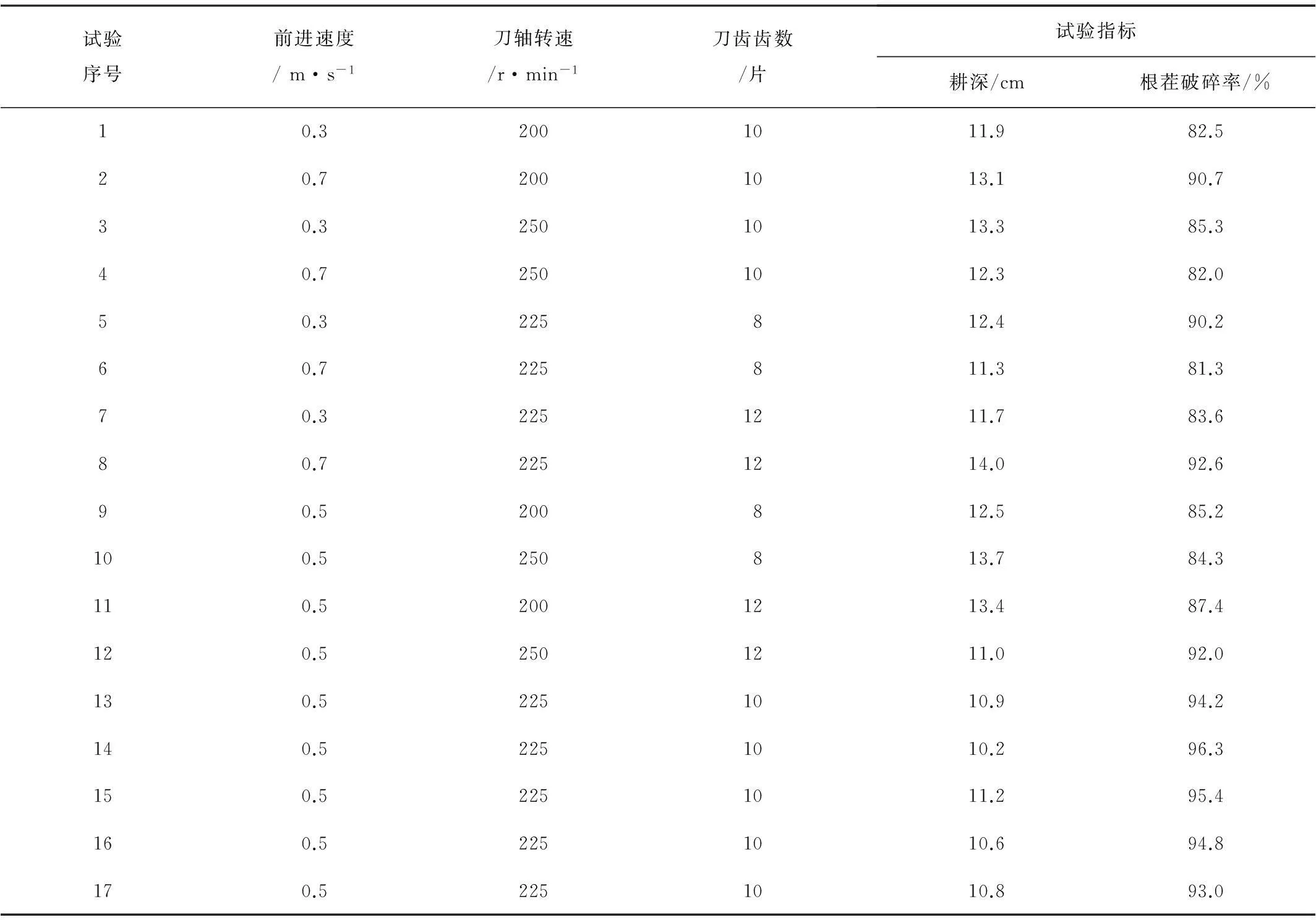
表3 Box—Behnken设计方案及试验结果

表4 根茬破碎率回归统计分析结果
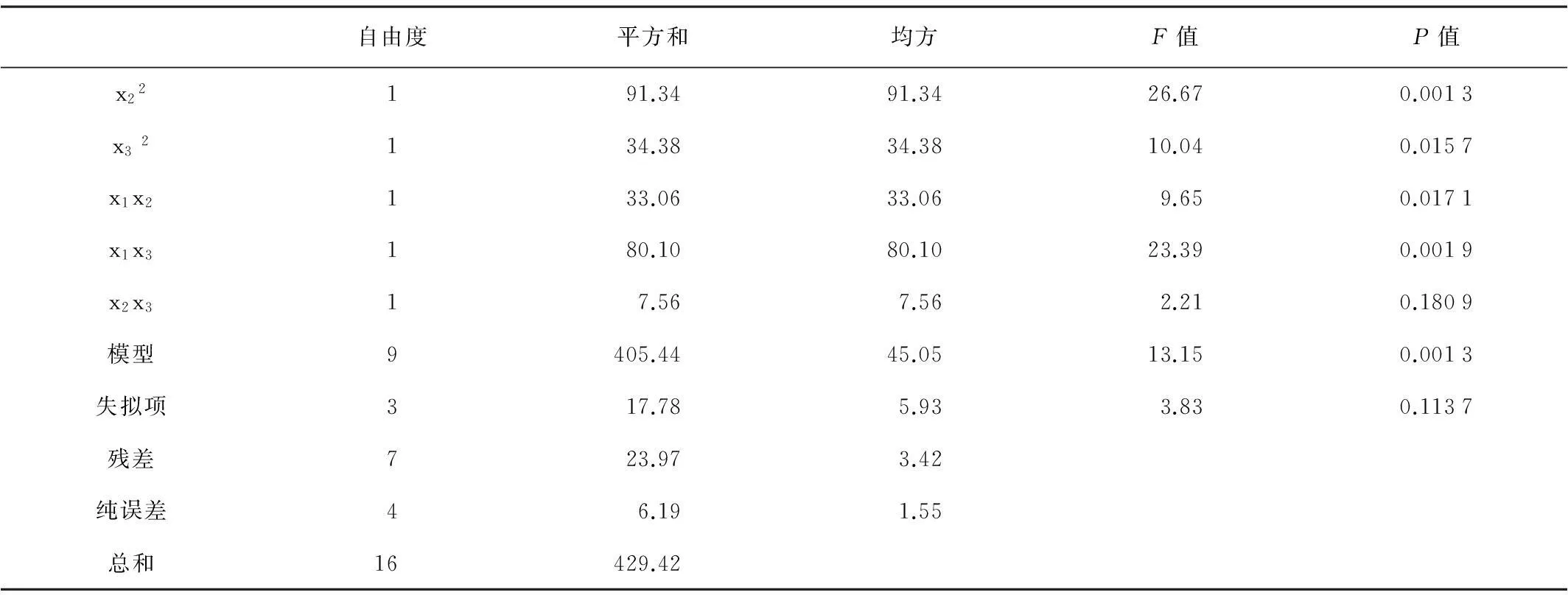
续表4

3.7根茬破碎率响应曲面分析
根据响应曲面图,可分析各因素对响应值的影响和各个因素间的交互作用。由表3中各项系数的P值可知:前进速度、刀轴转速、刀齿齿数对旋耕机根茬破碎合格率有极显著影响,影响程度由高到低依次为刀齿齿数、前进速度、刀轴转速。
图3~图5分别为旋耕机前进速度、刀轴转速、刀齿齿数对根茬破碎合格率交互作用的响应曲面分析图,且考察两个因素变化对指标影响时,第3个因素固定在零水平上。
由图3可知:在旋耕机刀齿齿数一定的情况下,前进速度、刀轴转速增大时,根茬破碎率逐渐增加,直到根茬破碎率达到最大值;之后,根茬破碎率随着前进速度、刀轴转速的进一步增加逐渐减小。
由图4可知:在旋耕机刀轴转速一定的情况下,前进速度、刀齿齿数增大时,覆土合格率逐渐增加;直到根茬破碎率达到最大值之后,根茬破碎率随着前进速度、刀齿齿数的进一步增加逐渐减小。
由图5可知:在旋耕机前进速度一定的情况下,刀轴转速、刀齿齿数增大时,根茬破碎率逐渐增加;直到根茬破碎率达到最大值之后,根茬破碎率随着刀轴转速、刀齿齿数的进一步增加而逐渐减小。
3.8田间验证试验
为检验其可靠性,以旋耕机前进速度0.6m/s、刀轴转速224r/min、刀齿齿数11片为参数进行了玉米根茬地验证试验。在此条件下,旋耕深度可达到13cm,玉米根茬破碎率达到95%以上。旋耕后土壤表面结构如表5所示。
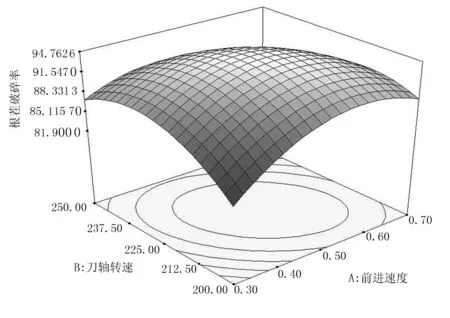
图3 前进速度和刀轴转速对根茬破碎率响应曲面图

图4 前进速度和刀齿齿数对根茬破碎率响应曲面图
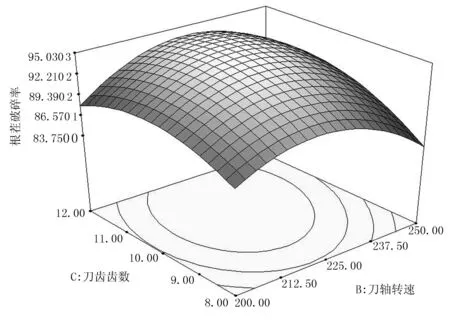
图5 刀轴转速和刀齿齿数对根茬破碎率响应曲面图

旋耕深度/cm根茬破碎率/%1395
旋耕后根茬均匀分布在土壤表面,满足旋耕后耕深值应达到10cm以上、粉碎后的根茬要直接覆盖在土壤表层或与土壤直接混合、根茬破碎率达到90%以上等作业要求。土壤结构如图6所示。
4结论
1)设计了一种适合小区作业的自走式旋耕机,对其工作原理及关键部件进行了有效的分析,对旋耕机耕幅、刀轴转速进行了计算选择。
2)采用Box—Behnken中心组合实验设计方法对小区自走式旋耕机进行了田间试验。结果表明:旋耕机前进速度0.6m/s、刀轴转速224r/min、刀齿齿数11片时,旋耕深度平均值最大可达13cm,根茬破碎率达到95%以上,满足了小区作业基本要求。
参考文献:
[1]周建来,李源知,焦巧凤.国内外旋耕机的技术状况[J].农机化研究,2000(6):49-51.
[2]中国农业机械化科学研究所.农业机械设计手册(上册)[K].北京:机械工业出版社,1988.
[3]李永磊,宋建农,康小军,等.双辊秸秆还田旋耕机试验[J].农业机械学报,2013,44(6):45-48.
[4]田明.日本旋耕机技术特点及操作使用要点[J].湖南农机,2009,36(2):56-59.
[5]李滨,崔东.小型农用旋耕机的设计[J].林业机械与木业设备,2006,34(3):30-32.
[6]张磊,王玉峰,陈雪丽,等.保护性耕作条件下土壤物理性状的研究[J].东北农业大学学报,2010(9):50-54.
[7]王金武,赵佳乐,王金峰,等.有机水稻中耕除草机设计[J].东北农业大报,2013(11):107-112.
[8]李理,霍春明.我国旋耕机研究现状及发展方向[J]. 现代化农业,2004(10):37-39.
[9]周宏明,薛伟,桑正中.旋耕机总体参数的优化设计模型[J].农业机械学报,2001, 32(5):37-39.
[10]华秀坤.旋耕机的发展历程及趋势展望[J]. 农业科技与设备,2013(8):30-31.
[11]应义斌,蒋焕煜.蔬菜棚室用自走式微型旋耕机的研究[J].农业工程学报,1997,13(1):88-90.
[12]谢宇峰,许剑平.国内外耕作机械的现状及发展趋势[J].农机化研究,2009,31(11):238-240.
[13]刘波.机械浅翻深松耕作技术的应用分析及发展前景[J].农机化研究,2006(1):63-65.
[14]钟卫东.多功能旋耕机及其关键结构设计[J].农业机械,2008(7):48-49.
[15]赵匀.农业机械现代设计方法综述[J].东北农业大学学报,2012(2):1-5.
Abstract ID:1003-188X(2016)04-0165-EA
Study on a Self-propelled Rotary Cultivator Used in Village
Wang Yingxue, Zhao Lijun, Liu Huanyu, Li Qiang, Zhou Fujun, He Di
(College of Engineering, Northeast Agricultural University, Harbin 150030, China)
Abstract:The the structure composition and working principle of a self-propelled rotary cultivator used in village. Box-Behnken central composite design method was employed to analyze the maize root crop field experiments of rotary tillage operation. Optimal parameters were obtained as the forward speed is 0.6m/s,rotary speed is 224r/min,blade teeth is 11 evaluation index to achieve the optimal rotary cultivator.Rotary tillage depth may reached 13cm,corn stubble root breakage rate of 95% which meets the basic requirement for residential area operation.
Key words:rotary cultivator; self-propelled; parameters optimization
文章编号:1003-188X(2016)04-0165-05
中图分类号:S222.3
文献标识码:A
作者简介:王英雪(1988-),女,山东潍坊人,硕士研究生,(E-mail) 15774509739@163.com。通讯作者:何堤(1951-),男,吉林德惠人,教授,博士生导师,(E-mail)hedi04511558@sohu.com。
基金项目:“十二五”国家科技支撑计划项目(2014BAD06B04-04)
收稿日期:2015-05-11
