牛蒡自动播种机的研制
2016-03-23谢炳光汤华飞马俊生
谢炳光,汤华飞,马俊生,刘 硕
(广西大学 机械工程学院,南宁 530004)
牛蒡自动播种机的研制
谢炳光,汤华飞,马俊生,刘硕
(广西大学 机械工程学院,南宁530004)
摘要:现阶段,我国主要采用人工播种牛蒡,存在诸多问题。为此,在现有牛蒡种植方法的基础上,研制了一种牛蒡自动播种机,由铅蓄电池、电动机、动力传动部分、行走机构、筛种机构和播种机构等组成。行走机构能够实现在田地垄上自动行走,筛种机构能按照一定的距离筛出种子且每次仅筛出1粒种子,播种机构能够实现自动播种牛蒡。试验结果表明:该播种机播种成功率达90%以上,且能耗较低,可以广泛应用于牛蒡机械化种植。
关键词:牛蒡;自动播种机;筛种机构;播种机构
0引言
牛蒡(Arctium lappa L.)亦称东洋参、牛鞭菜,为菊科牛蒡属二年生草本植物。牛蒡株 1~2m,根粗壮,直根系,茎直立,带紫色,上部多分枝;基生叶大形,茎生叶广卵形或心形,叶上表面无毛,下表面密被灰白短柔毛,基部心形;瘦果椭圆形,具棱,表面灰褐色,冠毛短刚毛状[1]。牛蒡分布于北美、欧洲、亚洲等地,后经人工培育形成多个品种。我国在 20 世纪 80 年代从日本引进牛蒡,现已在山东、江苏、安徽、黑龙江等地大面积种植。牛蒡根、茎叶、果实(牛蒡子)均可供药用。牛蒡子是一种传统中药,味辛、苦、寒,归肺、胃二经,具疏散风热、宣肺透疹、消肿解毒之功效;用于风热感冒、咳嗽痰多、咽喉肿痛、斑疹不透、风疹作痒及痈肿疮毒等症。牛蒡叶多作外用,有明显的消炎、解毒、镇痛作用。牛蒡根在日本和欧洲作为蔬菜上市[2]。
我国是农业大国,拥有较为成熟的种植技术,但在实际生产中,农业机械化程度较低。目前,我国农民主要采用人工种植牛蒡。种植牛蒡要选择土壤肥沃、质地疏松、排水良好、pH6.5~7.5的砂壤土栽培[3]。种植时,挖出一定宽度深1.2~1.5m的种植沟,再把土壤拌肥回填形成种植带[4];并按行距70~80cm、垄距25cm、垄高15cm在挖好的种植带上起垄播种[3]。这种传统种植方式劳动强度大,种植面积小。然而,因种植牛蒡收入高,农民刻意扩大种植面积,这与劳动力不足形成矛盾。目前,市场上已经存在螺旋式深松犁降低了开挖种植带的劳动强度,但农民依旧采用手工播种,生产力仍然有提高的空间。
为此,本文研制了一种自动牛蒡自动播种机,能够实现播种不同长度、不同品种的牛蒡种子,且可自动筛选出一颗种并自动播种,播种成功率达到90%以上。
1整机结构及工作原理
牛蒡自动播种机主要由铅蓄电池、电动机、动力传动部分、行走机构、筛种机构和播种机构等组成,如图1所示。传动部分由皮带轮1、皮带1、皮带轮2将电动机提供的动力传递至传动轴1,如图2所示。

1.皮带轮1 2.皮带1 3.皮带轮2 4.主动轮

1.皮带轮4 2.齿轮组 3.传动轴3 4.皮带2 5.皮带轮3
传动轴1一方面带动主动轮转动实现牛蒡自动播种机的行走;另一方面带动皮带轮3,通过皮带2、皮带轮4、传动轴2、齿轮组将动力传递给传动轴3;传动轴3带动筛种器转动实现牛蒡种子筛选。
2关键部件的设计
2.1动力传动部分
动力传动部分如图1和图2所示,由铅蓄电池提供电能驱使电动机工作。皮带轮1位于电动机转轴上,通过皮带1与皮带轮2连接;皮带轮2、皮带轮3分别位于传动轴1的两端,主动轮位于传动轴1的中间位置;皮带轮3与皮带轮4通过皮带2连接,皮带轮4位于传动轴2的外伸端;传动轴2通过轴承安装在机架上;筛种器位于传动轴3上,传动轴2与传动轴3通过齿轮组连接。如图3所示,齿轮组共有3个齿轮:齿轮1位于传动轴2上,齿轮2位于轴1上,齿轮3位于传动轴3上。齿轮1、齿轮2、齿轮3依次啮合且处于同一直线上,通过皮带轮1、皮带1、皮带轮2将电动机提供的动力传递给传动轴1。传动轴1一方面带动主动轮转动给行走机构提供动力,另一方面通过皮带轮3、皮带2、皮带轮4、传动轴2、齿轮组将动力传递给传动轴3,传动轴3带动筛种器转动使筛种机构工作。考虑到该机构用于农田环境不宜采用电线接固定电源供电,故采用铅蓄电池。该播种机工作时可能会有泥沙飞溅进入传动机构,若采用链条传动,泥沙粘连在链条与链轮上会阻碍机构工作甚至损坏部件,而利用皮带的弹力可以很好地解决这一问题,且皮带较之链条更易更换。采用齿轮组替代一对齿轮传动的目的在于便于布局使结构更加合理、紧凑,一对齿轮传动时齿轮半径较大,齿轮会于其他零件接触甚至重合。该设计能够在满足动力要求的前提下节省空间,降低成本。
2.2行走机构
行走机构如图4所示。主动轮、从动轮分别通过传动轴1、轴2与机架相连,扶手通过伸缩杆连接在机架靠近从动轮端。通过调节伸缩杆改变扶手高度以适应不同操作人员的不同身高。由动力传动部分将动力传递给传动轴1,传动轴1带动主动轮转动实现自动播种机行走,通过操作人员手扶扶手保持平衡。当需要转换方向时,将扶手向下压,以从动轮为支点,利用杠杆原理使主动轮离开地面停止行走;转动扶手使自动播种机转换方向,抬高扶手后自动播种机继续行走。主动轮与从动轮采用辐板式以减轻质量,且轮面设有凸轮,用于增强轮面与土壤间摩擦。行走机构可实现单方向自动行走及人工换向。

1.齿轮1 2.齿轮2 3.齿轮3 4.机架 5.轴3

1.扶手 2.伸缩杆 3.从动轮 4.皮带轮2
2.3筛种机构
筛种机构如图5所示。平台通过轴1、轴3、轴4连接在机架上,种子收纳盒固定在平台上。种子收纳盒与漏斗类似,拥有一个大口端和一个小口端,牛蒡种子从大口端放入从小口端筛出。筛种器位于小口端内部与种子收纳盒内壁存在间隙。种子收纳盒内壁靠近筛种器处粘有毛刷,其目的是填补间隙使牛蒡种子不会掉落,且不影响筛种器转动。种子收纳盒与筛种器均位于传动轴3上。如图6所示,筛种器为一圆柱体,在圆柱体侧面均匀开有槽,槽型为四棱台,靠近轴线一侧为棱台的小底面。使用前,将牛蒡种子从大口端放入,种子由于筛种器及毛刷阻挡不能进入小口端。工作时,动力传动部分将动力传递给传动轴3,传动轴3带动筛种器转动;牛蒡种子由于重力作用进入到筛种器的槽中,被筛种器由大口端带入小口端,因重力作用落下实现筛种。筛种器的槽深1~2mm,使得仅有1粒种子可以落入槽内进入小口端,而其余种子由于毛刷的阻碍无法进入小口端,防止发生“一坑多种”的现象。槽型采用四棱台原因:一是种子收纳盒内的种子排列杂乱无章,并非所有种子均与筛种器的轴线垂直,多数种子与筛种器的轴线垂直成一定角度。四棱台底面面积大,增加种子落入机会,减少因未筛出种子而造成的断垄现象。二是种子与筛种器槽的内壁接触存在摩擦,阻碍种子掉落至小口端。采用四棱台将减少种子与筛种器的接触,增加掉落机会,减少断垄现象。
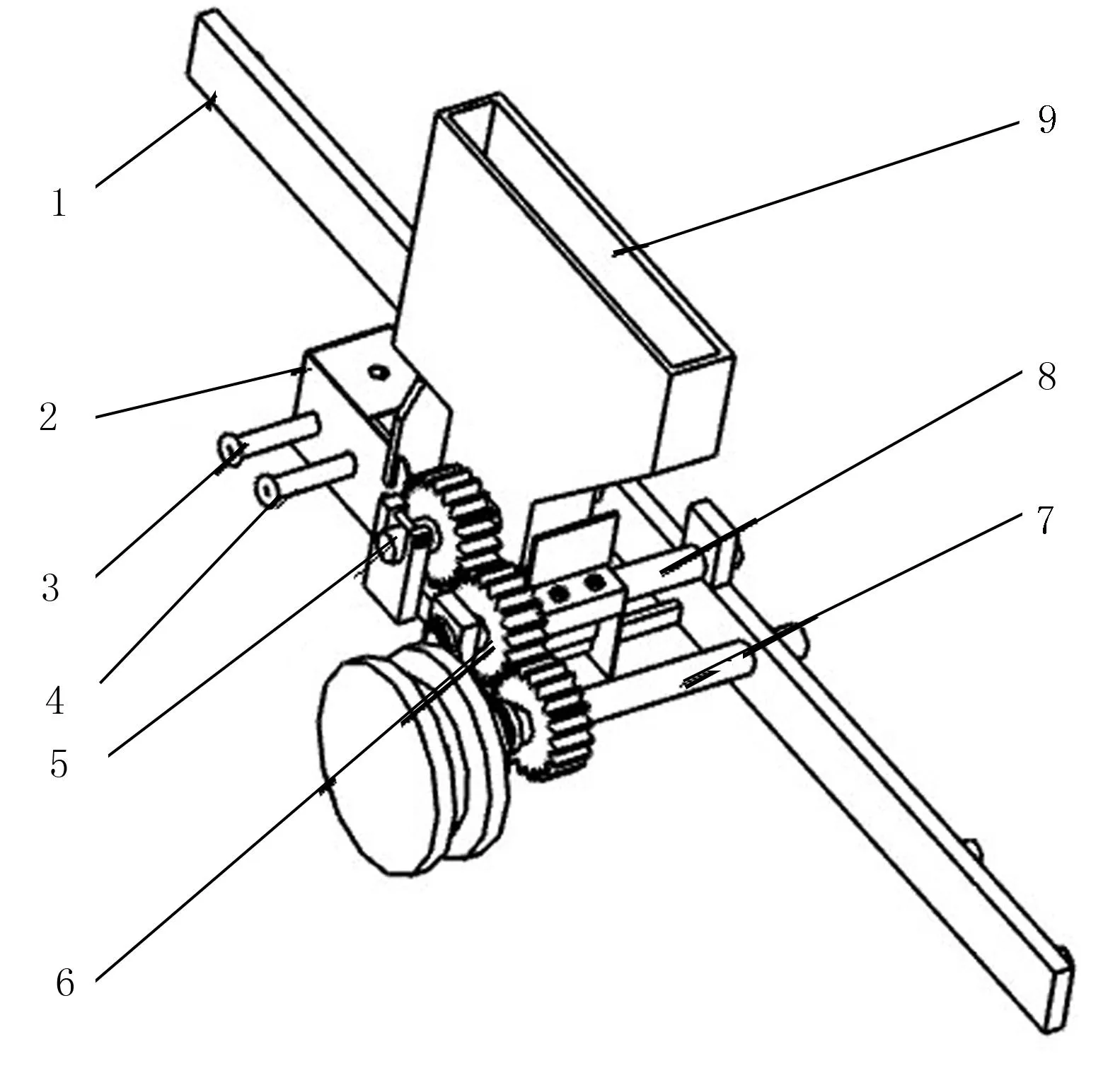
1.机架 2.平台 3.轴3 4.轴4 5.传动轴3

图6 牛蒡自动播种机的筛种器示意图
2.4播种机构
播种机构如图7所示。分土犁通过连杆1连接在平台上,俯视时分土犁呈“凸”字形,前窄后宽,前部底端有尖头,后部中空。合土犁通过连杆2连接在分土犁后部,合土犁形状与锄头类似。其中,分土犁宽度为4cm,深入土中深度为10cm。工作时,分土犁的尖头伸入土壤中,由于行走机构的动力作用使分土犁前进,在土壤上留下一道沟壑;此时,筛种机构筛出的种子从分土犁后部中空处落下,落到沟壑中;随后,合土犁前进,将沟壑抹平,完成播种。

1.连杆2 2.合土犁 3.分土犁 4.平台 5.连杆1
3性能试验结果与分析
3.1试验基本条件
性能试验在广西壮族自治区南宁市广西大学大学试验田内进行。该试验田年平均降水量1 400mm左右,土壤pH7.0左右。试验田地挖出宽0.3m、深1.4m的种植沟,再把土壤拌肥回填形成种植带;最后,按垄距25cm、垄高15cm在挖好的种植带上起垄。
牛蒡自动播种机的电动机采用110SZ10H5型号,其额定功率为36W,同步转速n=500r/min。选用日本进口柳川理想牛蒡种子及徐州优质牛蒡种子作为牛蒡自动播种机的性能试验材料。
3.2试验播种要求
该牛蒡自动播种机能够播种不同品种不同长度的牛蒡种子,以行距70cm在土壤上播种(既每两个播种位置之间的距离为70cm),尽量减少某一位置没有播种牛蒡种子及某一位置播种多颗牛蒡种子的情况发生。播种要求实现成功播种位置数占总播种数的90%。所选的牛蒡种子的长度为0.6cm~0.8cm,共进行5次不同地区播种试验,播种试验进行3次,每次播种100个位置,最后结果取平均值。
3.3试验结果
该牛蒡自动播种机试验结果如表1所示。

表1 牛蒡自动播种机性能试验结果
3.3.1种深度及沟宽
表1中,沟深的平均值为9.96cm,沟宽的平均值为6.18cm。参考分土犁的各项参数,沟宽比分土犁较宽。其原因是:牛蒡自动播种机在工作过程中产生震动使得分土犁产生水平位移导致沟宽变宽;但此时沟宽仍在合理范围之内。
3.3.2机具通过性
本次试验牛蒡播种机分别在5处不同质地土壤上播种,行走距离共计约350m,未发生机构无法前进或筛种机构堵塞等不良现象,具有良好的通过性。
4结论
1)该牛蒡自动播种机能够通过电动机提供动力,将动力传递给主动轮实现单向自动先走,且通过下压扶手可实现人工转换自动播种机行走方向。
2)将牛蒡种子放入种子收纳盒的大口端,种子在重力及自动播种机的工作震动作用下通过筛种器筛种,每次筛种仅筛出1颗种子。其能够播种不同长度及品种的牛蒡种子,可以实现每次播1颗种子,发生“断垄”及“一坑多种”的情况。
3)分土犁与合土犁配合完成播种工作,播种后种子完全被土壤覆盖,没有裸露在地表,符合种植要求。
4)根据测定的播种率,计算播种过程的能耗,即成功播种每一位置所需的能量。结果表明:该牛蒡自动播种机所需的能耗较低、结构合理、性能优良、提高了生产力,可适用于大中小规模的牛蒡种植。
参考文献:
[1]Zheng Y F,Peng G P. The study development of the chemical of Arctium lappa L.[J].时珍国医国药,2005,16(2):153-155.
[2]徐传芬.牛蒡的研究现状[J].天然产物研究与开发,2005,17(6):818-821.
[3]杜韧强,康尔艳,李良玉. 牛蒡种植新技术[J].新农业,1997(11):13-14.
[4]梁德建.在牛蒡种植中推广机械化深松技术[J].中国农机化,1995(6):26.
Design of the Walk-behind Burdock Automatic Planter
Xie Bingguang, Tang Huafei, Ma Junsheng, Liu Shuo
(School of Mechanical Engineering,Guangxi University,Nanning 530004,China)
Abstract:On the basis of existing burdock cultivation methods, this paper presents a burdock automatic planter, by lead-acid batteries, electric motors, power transmission parts, travel agencies, institutions and sowing seed screening mechanism and other components. Travel agencies can achieve ridge walk on the field, the screen according to certain kinds of institutions to screen out the seeds and each distance only weed out the seed, planting organizations can realize automatic seeding burdock. The test results show that the planter over 90% success rate, and low energy consumption.
Key words:burdock; automatic planter; screen kinds agencies; sowing the election agency
文章编号:1003-188X(2016)04-0122-04
中图分类号:S223.2+6
文献标识码:A
作者简介:谢炳光(1963-),男,南宁人,工程师。通讯作者:汤华飞(1993-),男(满族),山东文登人,本科学生,(E-mail)kylin2020@163.com。
基金项目:广西大学国家级大学生创新创业训练计划项目(141059301)
收稿日期:2015-03-23
