轨道式奶牛精饲料精确饲喂装备机械系统设计
2016-03-23蒙贺伟李亚萍高振江侯扶琴
蒙贺伟,李亚萍,高振江,李 辉,侯扶琴
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.中国农业大学 工学院,北京 100083;3.新疆西部牧业股份有限公司,新疆 石河子 832000)
轨道式奶牛精饲料精确饲喂装备机械系统设计
蒙贺伟1,李亚萍1,高振江2,李辉2,侯扶琴3
(1.石河子大学 机械电气工程学院,新疆 石河子832000;2.中国农业大学 工学院,北京100083;3.新疆西部牧业股份有限公司,新疆 石河子832000)
摘要:实施奶牛精细养殖是奶业发展的必然趋势,是提高奶牛养殖技术水平、降低生产成本的重要举措。为此,在前期研究基础上,完成了轨道式奶牛精饲料精确饲喂装备机械系统设计。该装备采用步进电机驱动与等径变螺距容积式计量方式相结合实现装备的精确给料,通过直流电机驱动与轨道式行进机构相结合实现装备的往复行进,实现了奶牛饲喂装备的行进与精确投料。试验结果表明:给料误差小于2%,符合精细养殖技术要求。
关键词:奶牛;精确饲喂;机械;轨道式
0引言
奶业是现代农业的重要组成部分。目前,我国奶业存在着靠数量促产量及养殖技术水平低等突出问题,奶牛单产水平低已成为制约我国奶业发展的重要方面。研究表明:开展奶牛精确养殖是提高奶牛单产的有效途径,因此开发奶牛精细养殖技术装备逐渐成为研究人员的重点,国内如李发德、宋占华、高振江、倪志江等[1-5]均对此开展了研究。笔者在倪志江、李继成、高振江、蒙贺伟等[6-11]研究的基础上,设计了一种轨道式智能化奶牛饲喂装备机械系统,系统采用基于步进电机驱动与等径变螺距容积式计量方式相结合实现装备的精确给料、通过直流电机驱动与轨道式行进机构相结合实现装备的往复行进,在实现精饲料精确给料的同时,并可实现装备的轨道式行进、自动行进及刹车等功能。
1总体结构及工作原理
1.1机械系统总体结构
轨道式智能化奶牛饲喂装备机械系统主要由给料机构、行进机构、执行元件及机架等部分组成。其中,给料机构主要由料仓、三螺旋给料器、步进电机、电机固定架、法兰盘等组成;行进装置主要由传动机构、直流电机、前后轴、行进轮和轨道等组成。装备结构及三维造型如图1所示。
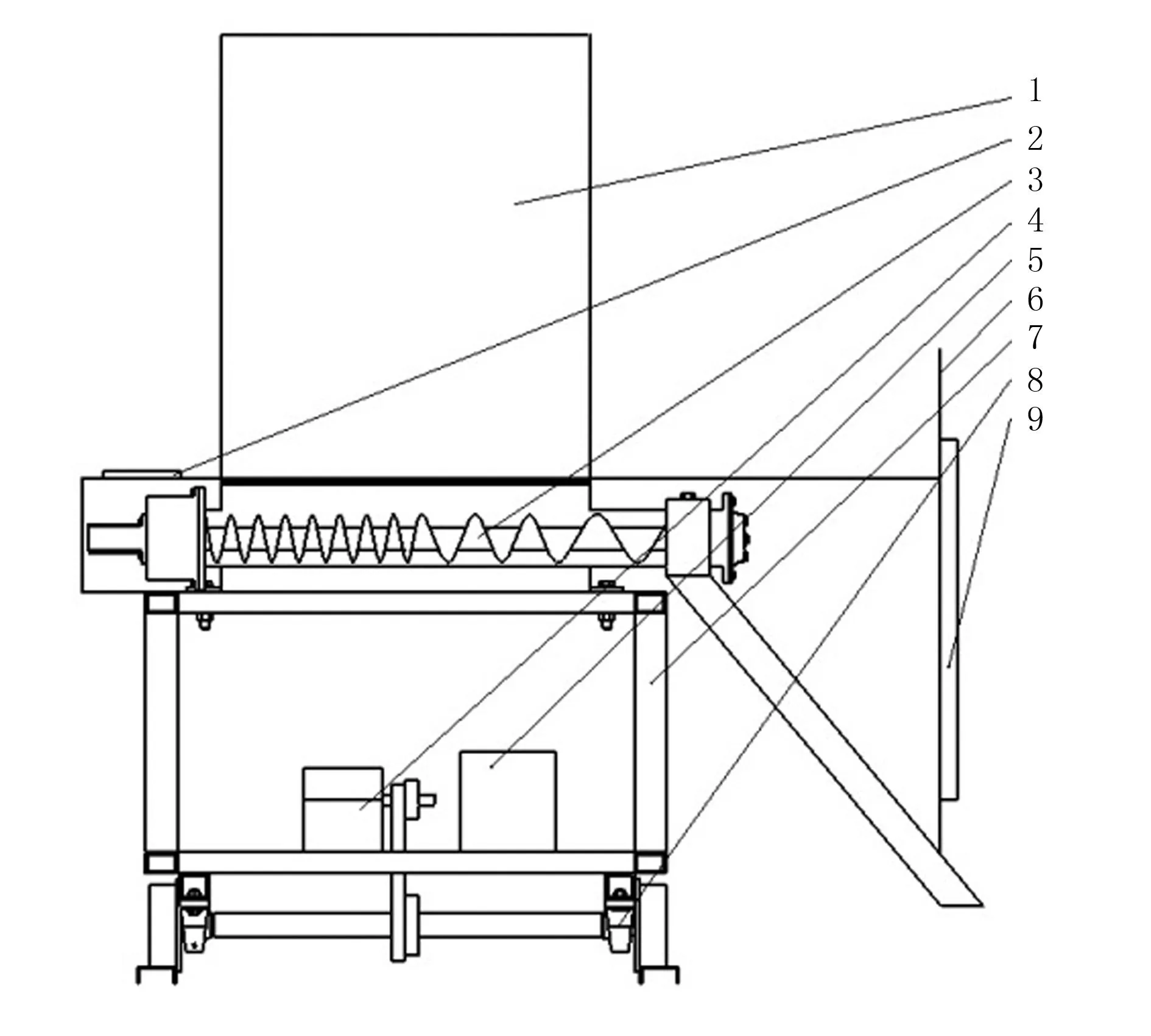

1.料仓 2.控制系统 3.给料装置 4.动力与传动系统
1.2工作原理
工作过程中,装备按照控制系统指令,通过带断电自动刹车器的步进电机经链传动带动前后轴完成装备的行进或停止;饲喂时,通过控制系统发出的指令控制步进电机旋转角度,继而带动三螺旋给料装置旋转,经下料溜槽将饲喂物料输送至个体牛只前。
2给料装置
给料装置主要包括料仓、料仓底座以及三螺旋给料器等。其中,三螺旋给料器由步进电机、联轴器、三等径变螺距螺旋叶片、螺旋输送器外壁及下料溜槽等组成。工作时,控制系统按照个体奶牛精饲料饲喂模型确定个体牛只精饲料需求量,并进一步转化为步进电机脉冲数,向步进电机驱动器发送工作指令并驱动步进电机运行,从而带动螺旋给料器进行精确投料。
2.1料仓部分
料仓部分主要包括料仓和料仓底座两部分。考虑到饲喂效率与牛舍环境的要求,本设计中料仓储藏仓装料量在700kg左右,材料为热轧钢板,厚度为2mm,饲喂机可满足200头牛场的饲喂试验需求,料仓形状为流线型。料仓三维图如图2所示。

图2 料仓三维图
料仓底座主要用于支撑料仓与安装三螺旋给料器,通过螺栓与料仓联接;三螺旋给料器经安装孔连接到料仓内部,通过法兰与料仓底座连接;底座内部采用人字形支架结构,以方便下料,结构如图3所示。料仓底座由厚度为3mm热轧钢板制成。
2.2三螺旋给料器
装备通过步进电机作为螺旋给料器的执行元件,通过设定步进脉冲数控制螺旋给料器转动角度对给料量进行控制,从而解决了直流电机由于电压不稳而造成的投料不稳定性现象,提高了装备投料精度,通过设定,步进电机最小控制角度为1.8°。
三螺旋给料器由螺旋叶片、输送轴组成,螺旋长度分别为480、385、275mm,对应螺距分别为40、35、25mm。螺旋给料器的结构及三维图如图4所示。
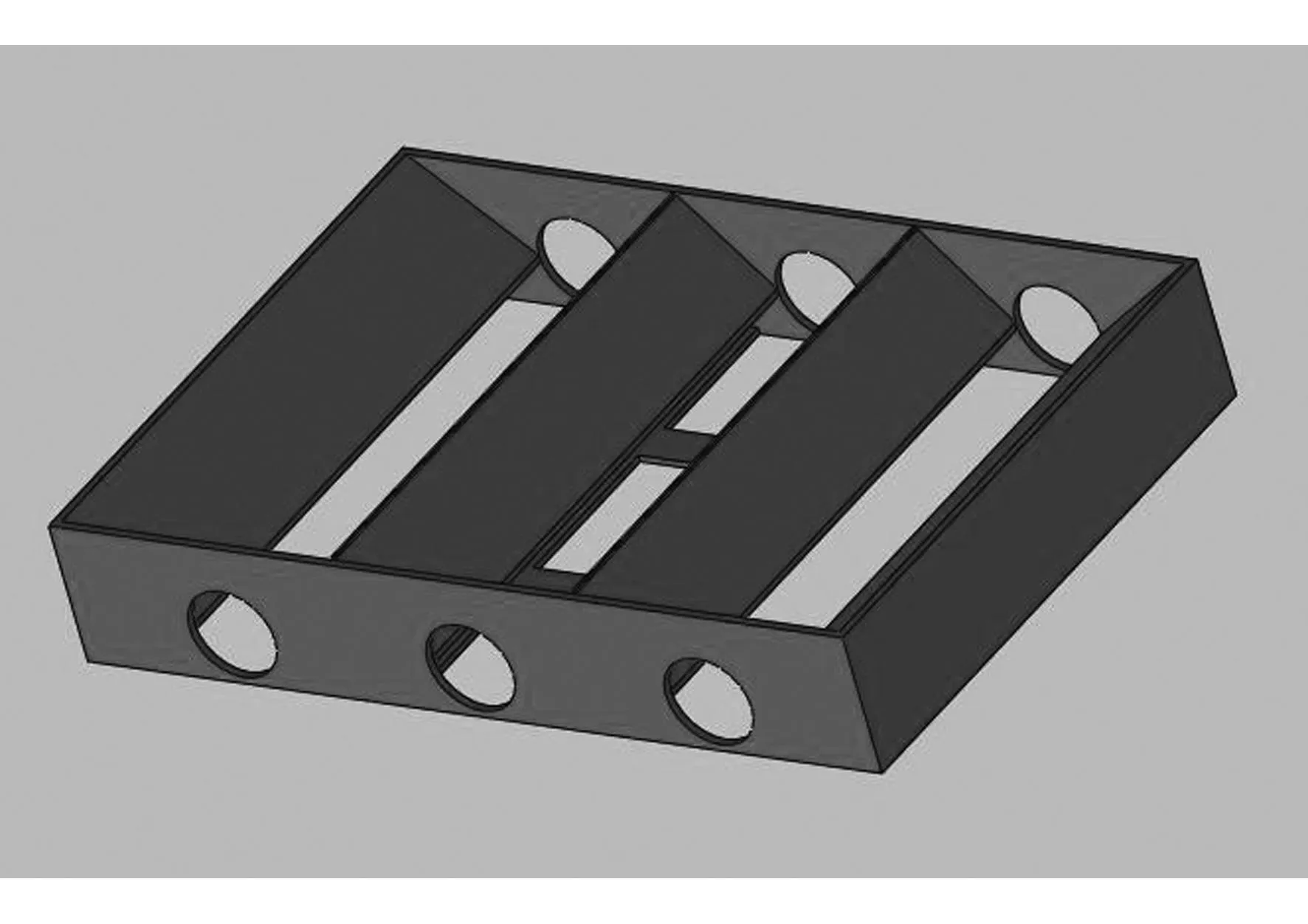
图3 料仓底座三维图

图4 三螺旋给料器结构与三维图
在三螺旋给料装置中,搅龙是主要工作部件,因此对其进行了有限元结构分析。搅龙材料选择为45钢,屈服强度355MPa,通过分析,获得其位移、应力和安全系数变化云图如图5和图6所示。
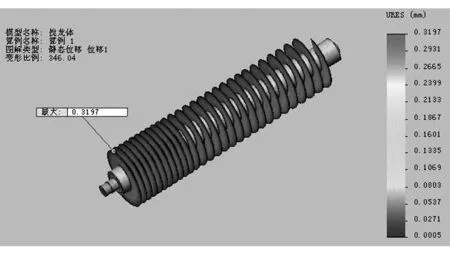
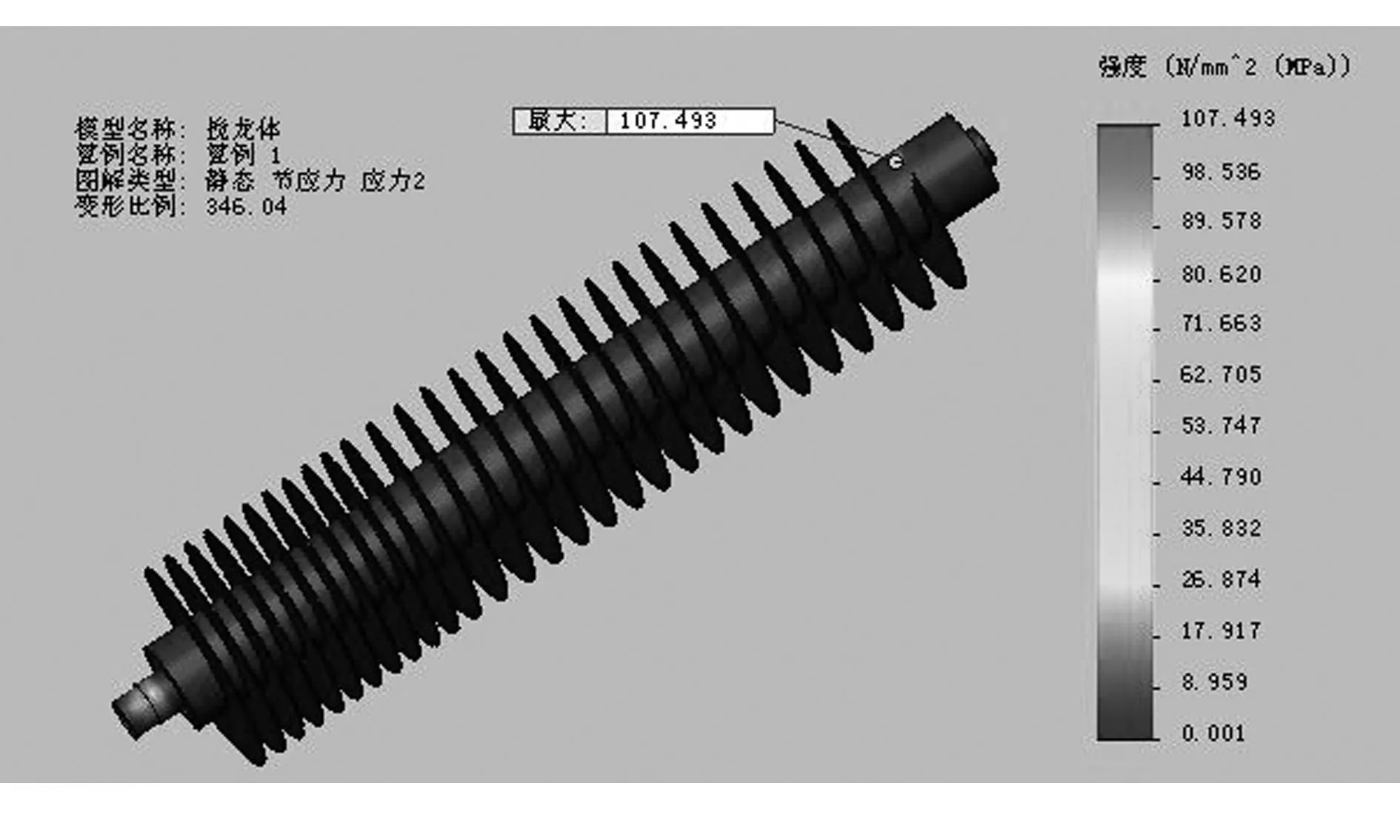
图5 位移变化云图和应力变化云图

图6 安全系数变化云图
由此可知:螺旋短轴最大位移变化量为0.319 7mm,最大应力为107.493MPa,安全系数为3.81,符合使用要求。
2.3给料驱动电机
给料装置步进电机选用北京时代超群有限公司生产的两相步进电机,电机型号为110BYG250-115,电机主要参数如表1所示。

表1 电机技术参数
步进电机控制器采用2HD8080A/B系列伺服式数字驱动器,具有实时电流跟踪控制功能,从而减少了高频自激振动及共振等现象,降低了噪声,提高了工作可靠性。
3行进机构
3.1行进驱动电机
行进驱动电机选用48V直流电机,为了保证装备能够及时停车,在采用断电自动刹车式直流电机的同时,在装备中安装有刹车机构以辅助直流电机刹车器停车;装备动力传动采用链传动。工作过程中,接收到指令的行进电机启停,并通过链条带动前轴旋转,同时前轴通过链条带动后轴旋转,装备行进速度由控制平台的速度控制旋钮控制,装备电源采用4块12V蓄电池串联供电。行进直流电机的技术参数如表2所示。

表2 行进电机技术参数
3.2行进机构的优化分析
装备行进机构是装备工作可靠的重要保障,其主要受力零件为行进轴。为此,对装备行进轴进行有限元分析,行进轴材料为45钢,屈服强度355MPa,承载负载,网格划分后节点总数13 905个,单元总数8 406个。
分析后安全系数云图如图7所示。由图7可知:行走轴最大位移变化量0.603mm,最大应力37.2MPa,安全系数10.11,符合使用要求。

图7 安全系数变化云图
4精度试验
4.1试验材料
农标普瑞纳奶牛泌乳期精料补充料与自备料按2:1均匀混合,主要成分为玉米、麸皮、豆粕(饼)、鱼粉、棉粕、菜粕、矿物质、氨基酸及多种维生素等。
4.2试验仪器
精饲料精确饲喂机(自制),电子秤(上海友声衡器有限公司制造,最大值30kg,分度值2g)。
4.3数据分析
精度测试试验设定饲喂机目标投料量分别为2.0、2.5、3.0、3.5、4.0kg/次,得到测试数据如表3所示。

表3 测试数据统计表
测量值和目标值的相对误差如表4所示。
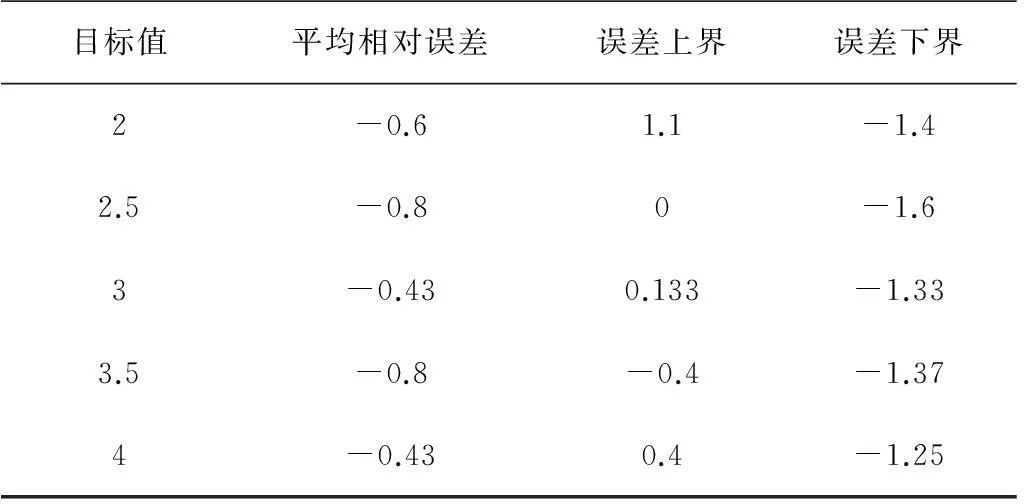
表4 相对误差统计表
从表4可知:装备投料相对误差小于2%,满足精确饲喂精度要求。
5结论
实施奶牛精细养殖是奶业发展的必然趋势,本研究完成的轨道式奶牛精饲料精确饲喂装备机械系统,采用步进电机驱动与等径变螺距容积式计量方式相结合实现装备的精确给料,通过直流电机驱动与轨道式行进机构相结合实现装备的往复行进。试验结果表明:其给料误差小于2%,符合精细养殖技术要求。
参考文献:
[1]李法德,宋占华,颜世涛,等.奶牛精料自动补饲装置的研究进展[C]//中国农业工程学会2009年学术年会论文集.中国农业工程学会,2009.
[2]李法德,宋占华,颜世涛,等.奶牛数字化精细饲养设备的研究进展[J].中国农机化,2010(3):51-55.
[3]宋占华.智能化槽轮式奶牛个体精料变量补饲机的研制[D].泰安:山东农业大学,2010.
[4]施正香,徐云丽,李保明,等.我国奶牛养殖小区生产 工艺与工程配套技术体系研究[J].农业工程学报,2006,22(增刊2):50-55.
[5]颜世涛,闫银发,宋占华,等.奶牛个体智能化精料变量补饲系统设计与试验[J].农业机械学报,2011,42(2):168-172.
[6]倪志江,高振江,蒙贺伟,等.智能化个体奶牛精确饲喂机设计与实验[J].农业机械学报,2009,40(12):205-209.
[7]方小明.智能化移动式奶牛装置的设计及试验研究[D].北京:中国农业大学,2008.
[8]高振江,郭跃虎,蒙贺伟,等.自走式奶牛精确饲喂机控制系统[J].农业机械学报,2012,43(11):226-230.
[8]蒙贺伟,郭跃虎,高振江,等.双模自走式奶牛精确饲喂装备设计与试验[J].农业机械学报,2013,44(2):52-56.
[9]李继成,高振江,肖红伟,蒙贺伟,等.基于单片机的奶牛精确饲喂装备设计与试验[J].农业机械学报,2011,42(1):101-105.
[10]蒙贺伟,高振江,坎杂,等.等径变螺距奶牛精确饲喂给料装置设计与试验[J].农业工程学报,2011,27(3):103-107.
[11]高振江,李辉,蒙贺伟.基于全混合日粮饲喂技术的精饲料精确饲喂模式[J].农业工程学报,2013,29(7):148-154.
Abstract ID:1003-188X(2016)05-0165-EA
The Rail-mounted Cow Concentrated Feed Feeds the Equipment Mechanical System Design Precisely
Meng Hewei1, Li Yaping1, Gao Zhenjiang2, Li Hui2, Hou Fuqin3
(1.College of Mechanical and Electronical Engineering,Shihezi University,Shihezi 832000,China;2.College of Engineering Institute,China Agricultural University,Beijing 100083,China; 3.Xinjiang Western Animal Husbandry Limited by Share Ltd,Shihezi 832000,China)
Abstract:Implementation cow fine breed is the dairy industry development inevitable trend, it is an important measure to raise the cow breeding technical level and reduce the production cost. In the earlier research base, this article completed the equipment mechanical system design precisely of the rail-mounted dairy cow precision feeding, the equipment uses the stepping motor-driven changes with and other diameters the pitch volume measurement way unified to realize the equipment gives the accurate feeding , unified to realize the reciprocation of equipment to march forward through the direct current machine actuation and rail-mounted march organization, the equipment that the research completed realized the cow to feed the equipment march by with the precise batch feeding. After the experiment, the material error is smaller than 2% , meets the fine cultivation specification.
Key words:cow; accurate feeding; mechanics; rail-mounted
文章编号:1003-188X(2016)05-0165-04
中图分类号:S817.3
文献标识码:A
作者简介:蒙贺伟(1982-),男,新疆伊犁人,副教授,(E-mail)mhw_mac@shzu.edu.cn。通讯作者:李亚萍(1980-),女,黑龙江虎林人,讲师,硕士,(E-mail)lyp_mac@shzu.edu.cn。
基金项目:国家农业科技成果转化资金项目(2010GB2G410603);新疆生产建设兵团科技支疆项目(2013AB005)
收稿日期:2015-04-20