基于多信道路由控制的精量播种机优化设计
2016-03-23郑仕勇覃德泽鲍秀兰
郑仕勇,朱 强,覃德泽,鲍秀兰
(1.贺州学院 计算机科学与信息工程学院,广西 贺州 452899;2.中原工学院 信息商务学院,郑州 450007;3.华中农业大学,武汉 430070)
基于多信道路由控制的精量播种机优化设计
郑仕勇1,朱强2,覃德泽1,鲍秀兰3
(1.贺州学院 计算机科学与信息工程学院,广西 贺州452899;2.中原工学院 信息商务学院,郑州450007;3.华中农业大学,武汉430070)
摘要:为了提高花生播种机播种的质量及作业效率,在花生引播机的路径和排种器的控制系统中,引入了多信道独立通信原理,降低了播种过程的漏种率;利用模糊神经网络控制原理,结合模糊域对花生播种机的结构进行了非线性优化设计。为了验证设计的花生精量播种机结构和控制系统的可靠性,对花生播种机进行了田间试验,结果表明:多信道路由花生播种机的合格率要明显高于传统的播种机,重播率要明显低于传统的播种机,破碎率和空穴率都比较低。这说明播种机的路径选择和排种器的控制都达到了最优,为花生播种机的研究和设计提供了理论依据。
关键词:精量播种;模糊控制;播种质量;神经网络;排种器;多路由
0引言
播种机在农业生产中是非常关键的,为了配合农作物的生长时间,必须在较短的时间内进行播种,精量播种机可以根据农业生产的要求,将种子播种到土地里,使作物良好的生长。播种的质量好坏直接关系到作物的出苗和成长,因此对作物的产量影响很大。由于精密播种机可以保证种子在田间得到最合理的生长环境、播种质量高、株距均匀、播种深度可以调节,为作物的生长发育创造了良好的条件,不仅可以节省大量的种子,而且提高了作物的产量。为了提高播种机播种速度及播种精度,本文依据模糊控制神经网络原理对排种器的结构进行优化,使用多路多信道控制对花生引播机和排种器进行联合控制,大大提高了播种的效率,提高了播种的质量。
1花生精良播种机总体设计
随着现代农业科学技术的发展,传统农业的生产方式发生了巨大的变化,而这些变化中最主要的就是播种方式的改变,各种各样现代化、自动化的播种方式,极大地提高了播种的效率和播种质量。
图1为花生播种机的总体优化设计流程。由图1可以看出:花生播种器的总体设计主要包括排种器类型的设计及排障器结构的优化(见图2),在排种器和引播机的控制中使用多路由多信道控制,最后通过模糊神经网络调节,对模型进行优化。
排种器倾斜角度的优化是通过模糊神经网络控制来实现的,通过神经网络学习算法,降低初始倾斜角度的射击误差,从而得到初始倾斜的设计角度。
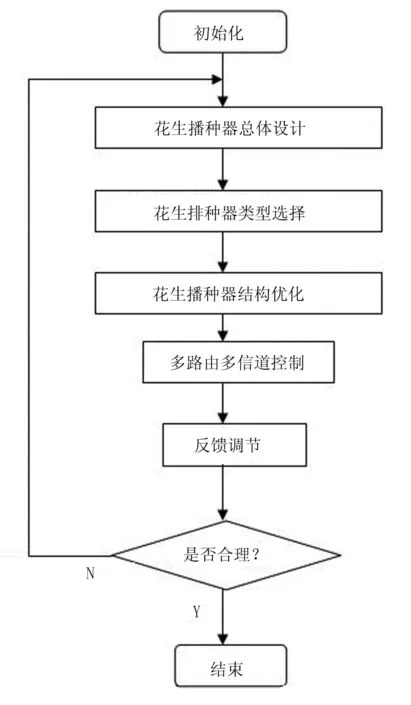
图1 花生播种机总体优化设计

图2 排种器结构优化设计
2花生引播机机械结构设计
播种机的主要功用性评价是利用一定的株距或者播量,将种子以一定的深度播种到土壤里,然后覆土,通过施肥、喷洒农药和锄草等操作,为种子的生长提供较好的条件,从而提高粮食的产量。
图3为播种中耕通用机,其引播装置为动力机械,主要环节是排种器的设计。排种器和引播机械通过独立信道控制,实现了多路由多路径的精密播种控制。排种器主要分为两类:一是立式圆盘排种器;二是倾斜圆盘碟式排种器。立式圆盘排种器如图4所示。
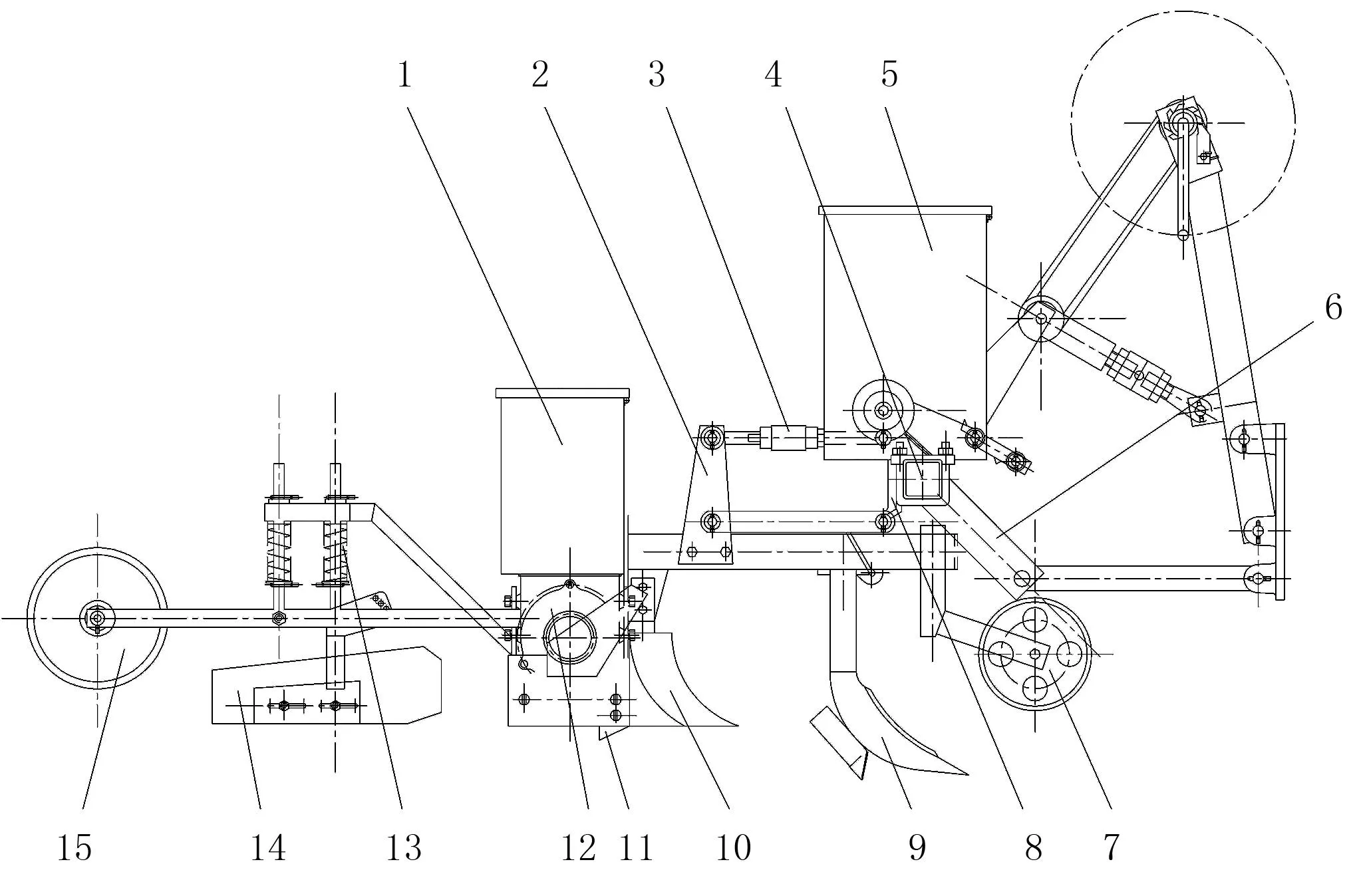
1.种箱 2.后支臂 3.仿形机构 4.主梁 5.肥箱 6.下悬挂点

1.种箱 2.种子 3.清种板 4.护种板 5.立式圆盘
如图4所示,圆盘的安装方式采用和地轮一根轴式的安装,种子首先经过圆盘的孔,然后随着圆盘一起旋转,多余的种子会被刮种板去掉。在护种板的作用下,种子受到自身重力的作用,投入到种沟中,完成排种作业。
图5为倾斜圆盘碟式排种器,主分为壳体式和箱式。如图1所示排种器工作时,驱动轴通过锥齿轮将动力传递到分种碟,分种碟随之转动; 位于种箱下部充种区的种子滑入由分种匙和隔板斜交形成的持种空间,随着分种碟旋转运动,种子由分种匙向上托起。

1.固定支架 2.壳体 3.分种碟 4.分种匙 5.种箱
如图6所示,持种空间的体积取决于分种匙顶部的厚度Hs、宽度Bs、斜圆柱半径Rs和圆柱面相对于隔板倾斜角度s,确定合理的分种匙结构参数是保证播种质量的充分条件。
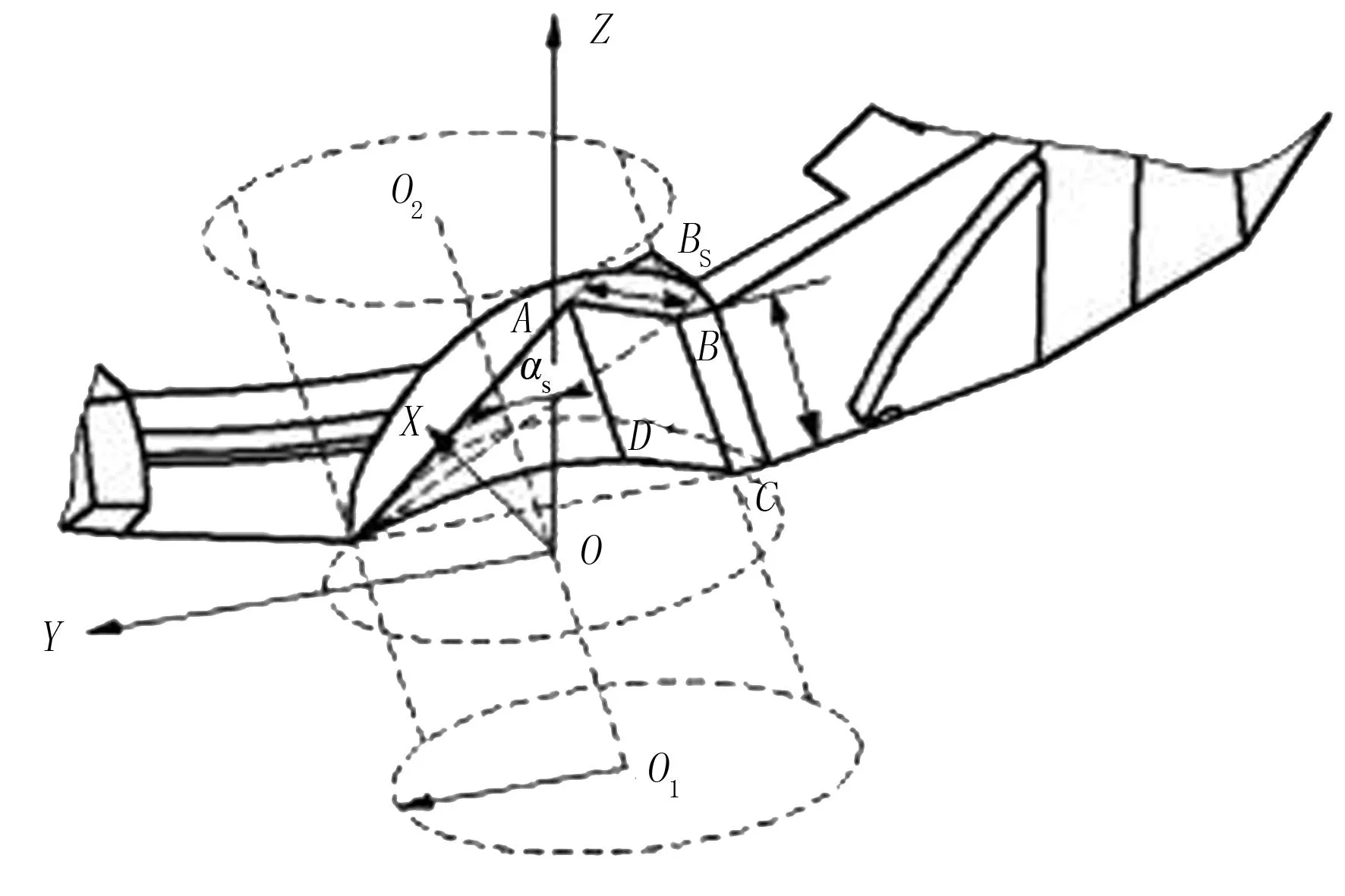
图6 分种匙的结构
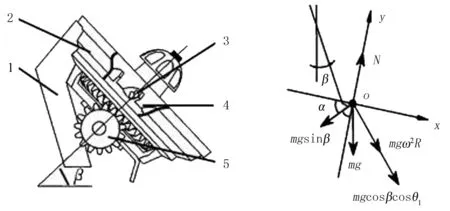
图7表示清种过程的受力,由力的分布可以建立各个力之间的平衡关系。其主要表达式为
(mgcosβcosθ1+mω2R)cosα+mgsinβsinα-N=0
(1)
其中,m表示种子质量;g表示重力加速度;α表示导种平面角;β表示倾斜角度;ω表示角速度;R表示分种碟半径。在临界条件下,N为0,则表达式可以写成
(mgcosβcosθ1+mω2R)cosα+mgsinβsinα=0
(2)
由此可以得到清种的初始角度为
(3)
影响排种器性能的好坏主要取决于分种碟转速、倾斜角度及分种碟半径。为了优化结构设计,需要对初始倾斜角度进行优化设计,本文采用模糊神经网络优化算法对初始倾斜角度进行优化设计。设计网络的结构如图8所示。
1.导种管 2.隔板 3.花生 4.分种碟 5.驱动齿轮

图8 神经网络结构图
神经网络结构主要有3个层次构成,包括输入层、神经网络算法推理计算层和输出层,结合模糊域可以对清种粒进行非线性优化设计。对初始倾斜角度误差E、误差变化率EC、控制量U的模糊集合及论域定义如下:E、EC和U的集合均为{NB、NM、NS、0、PS、PM、PB}隶属度函数均为三角函数,如图9所示。
按照图9的设置,可以继续分别设置变量初始倾斜角度的隶属度函数、变量U的隶属函数,通过模糊控制优化可以得到如图10所示的残差计算曲线。
图10表示利用模糊BP神经网络对结构进行优化后得到的误差曲线,利用MatLab模糊神经网络计算可以得到初始倾斜角度的数据,根据数据可以对结构进行优化设计。
3多信道路由花生精量播种机测试
为了验证设计的多信道路由花生精量播种机的播种效果,设计了播种机的播种试验,分别采用独立信道路由对播种机的路径和排种装置进行控制,装置如图11所示。
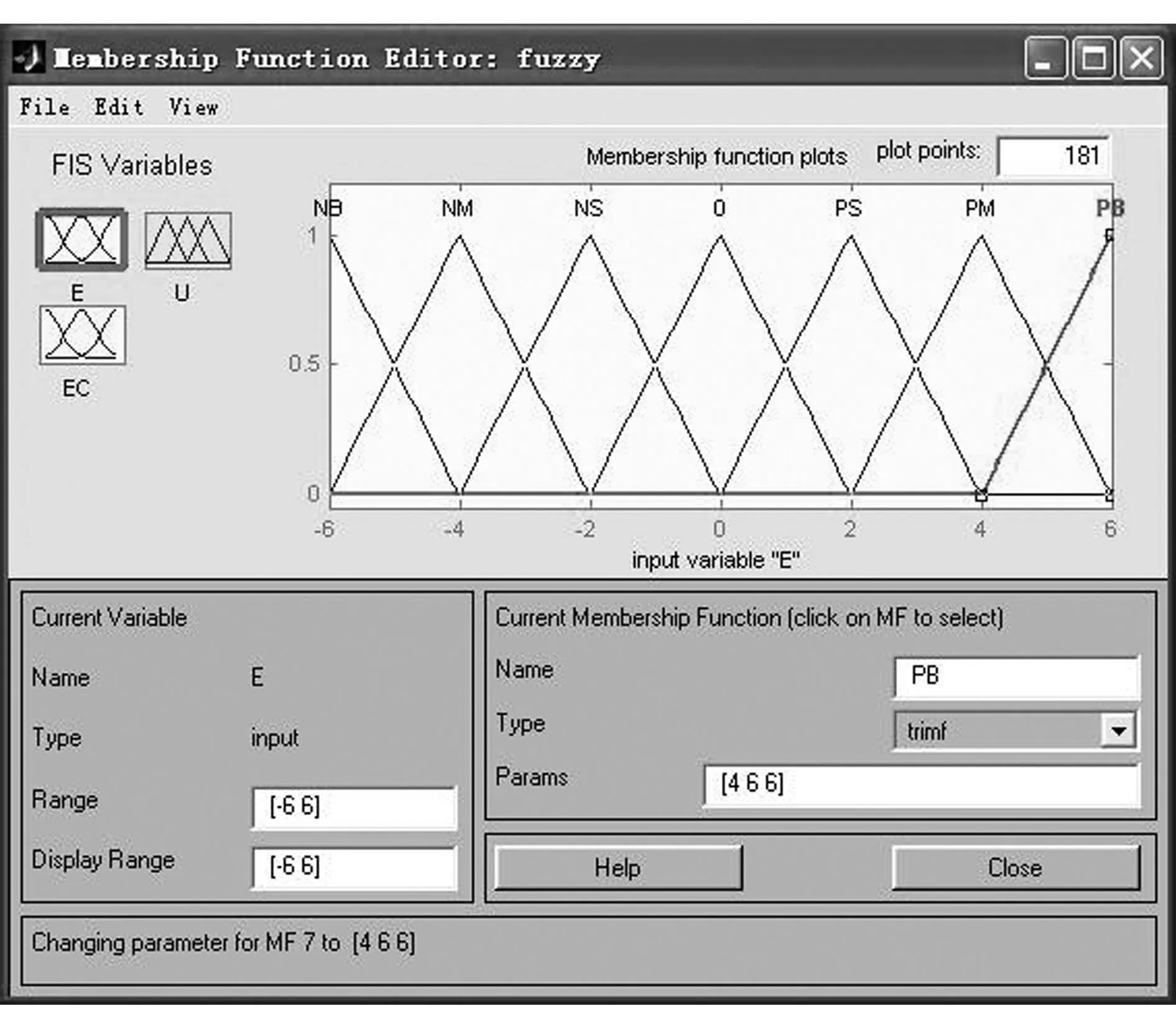
图9 变量E的隶属度函数
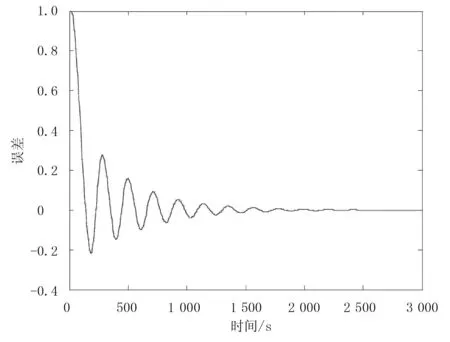
图10 Matlab计算误差曲线

图11 花生精量播种机示意图
为了验证播种机的播种效果,以穴粒数合格率、重播率、破碎率及空穴率作为试验指标,其统计计算公式分别如下:
穴粒数合格率为
(4)
重播率为
(5)
破碎率为
(6)
空穴率为
(7)
其中,T表示实验过程中总的播种穴数;n1表示具有2个籽粒的穴的个数;n2表示具有3个籽粒的穴的个数;n3表示具有破碎籽粒的穴的个数;n4表示具有空穴籽粒的穴的个数。图12为使用传统花生播种机和多信道路由控制花生播种机进行试验得到的合格率对比曲线。由图12可以看出:随着试验测试的增加,两种机械的试验结果都比较稳定,说明试验数据的有效性。由曲线可以看出:多信道路由花生播种机的合格率要明显高于传统的播种机,从而验证了多信道路由控制花生播种机的有效性和可靠性。

图12 合格率对比曲线
图13为使用传统花生播种机和多信道路由控制花生播种机进行试验得到的重播率对比曲线。由图13可以看出:多信道路由花生播种机的重播率要明显低于传统的播种机。这是由于在多信道路由联合控制下,播种的路径和排种器的精度都得到了控制,从而使播种机的效果达到了最优。
表1表示多信道路由控制花生精量播种机播种过程破碎率和空穴率的实验结果。由表1可以看出:该装置的破碎率和空穴率都比较低,这说明播种机的路径选择和排种器的控制都达到了最优,从而验证了设计的播种机械的可靠性。
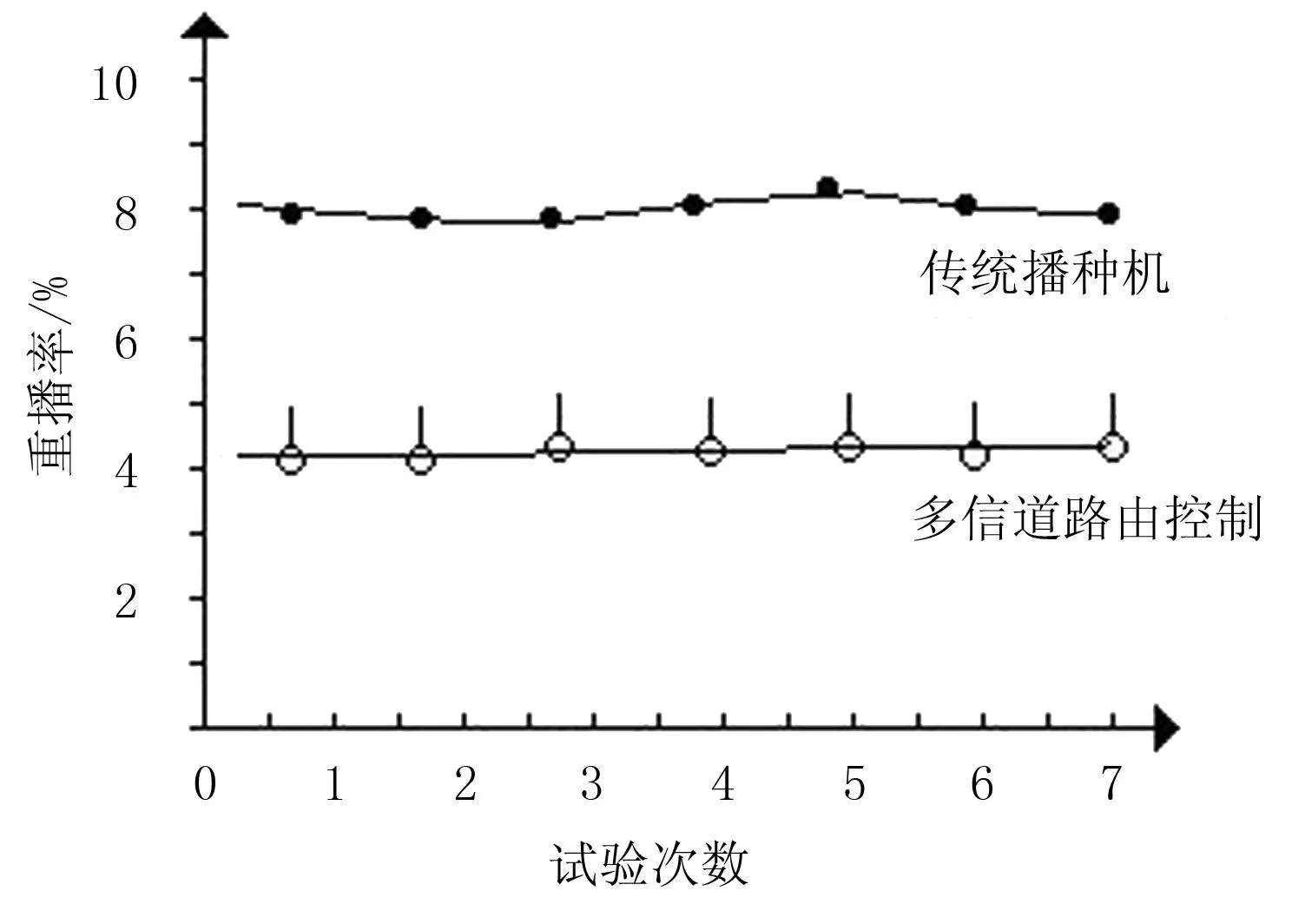
图13 重播率随实验次数变化曲线

%
4结论
1)为了提高花生播种的质量,提高播种机械的作业效率,在播种路径和控制系统中,使用了多路由多信道控制原理,从而大大降低了播种机的漏播率;采用了模糊神经控制方法对排种器的结构进行了优化设计,对播种器倾斜角度进行了神经网络优化设计,提高了播种器结构的优化效果。
2)为了验证装置的有效性和可靠性,通过田间试验的方法对装置进行了验证。通过验证发现,该播种器机的合格率要明显高于传统的播种机,并且具有重播率低、破碎低和空穴率低等优点。
3)本文设计的花生播种器可以优化的地方还有很多,比如控制系统的优化及路径优化等等,在今后的设计中,还需要加入更多的优化因素,使该播种机的适应性更强,应用范围更广。
参考文献:
[1]顾峰玮,胡志超,王海鸥,等.鸭嘴滚轮式花生播种器设计与运动轨迹[J].中国农机化,2010(4):60-63.
[2]刘仕昌,陈鹏,徐平.小型畜力花生播种机的设计[J].中国农机化,2013,34(2):70-72.
[3]吕小莲,刘敏基,王海鸥,等.花生膜上播种技术及其设备研发进展[J].中国农机化,2012(1):89-92.
[4]李国林,宋炜,毛俐,等.国内外几种主要排种器的特点[J].农业科技与装备,2011(8):70-73.
[5]何波,李成华,张家峰.倾斜圆盘勺式精密排种器充种过程的种子运动分析[J].沈阳农业大学学报,2009,40(2):234-236.
[6]李成华,夏建满,何波.倾斜圆盘勺式精密排种器投种过程分析[J].农业机械学报,2005,36(3):48-50.
[7]徐祝欣,田立忠,尚书旗,等.2BFD-4型花生覆膜播种机的设计与试验[J].农业工程学报,2012,28(增刊2):13-17.
[8]张智猛,胡文广.中国花生生产的发展与优势分析[J].花生学报,2005,34(3):6-10.
[9]周瑞宝.中国花生生产加工产业现状及发展建议[J].中国油脂,2005(2):79-82.
[10]王盛玉.花生生产全程机械化技术应用[J].农机科技推广,2007(3):22-25.
[11]崔清亮,秦刚,王明富.几种典型的精密排种器的对比分析[J].山西农业大学学报,2003(1):69-71.
[12]李亚芹,夏峰.我国发展精准农业的必要性[J].农机化研究,2006(6):4-6.
[13]高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4.
[14]王晋生,王桂英.小麦机械化播种实践[J].农业技术与装备,2009(9):21-22.
[15]刘蕴贤,倪道明,李从华,等.不同施肥方法对水稻生长及稻田周围水体污染的影响[J].天津农业科学,2007,13(1):31-34.
[16]吴子岳,高焕文,张晋国.玉米秸秆切断速度和切断功耗的试验研究[J].农业机械学报,2002,32(2):38-41.
[17]何伟,陈彬,张玲.DSP/BIOS 在基于DM642的视频图像处理中的应用[J].信息与电子工程, 2006, 4(1): 60-62.
[18]龚菲,王永骥.基于神经网络的PID参数自整定与实时控制[J].华中科技大学学报:自然科学版,2002,30(10):298-305.
[19]赵望达,鲁五一,徐志胜,等.PID控制器及其智能化方法探讨[J].化工自动化及仪表,1999,26(6):45-48.
[20]谷传纲,阎防,王彤.采用改进的BP神经网络预测离心通风机性能的研究[J].西安交通大学学报,1999,33(3):43-47.
[21]郭艳兵,齐古庆,王雪光.一种改进的BP网络学习算法[J].自动化技术与应用,2002,26(2):13-14.
[22]赵星星,罗克露.嵌入式实时操作系统移植技术的研究与应用[J].计算机工程,2007,33(17):90-92.
[23]马德新,徐鹏民.实时操作系统pC/OS-11调度算法的研究[J].微计算机信息,2007,23(6):73-74.
[24]杨超,张冬泉,赵庆志.基于S曲线的步进电机加减速的控制[J].机电工程,2011,28(7):813-817.
[25]浦艳敏.关于数控系统加减速控制的研究[J].科学技术与工程,2009,9(22):6782-6785.
[26]张航伟,陈婵娟.开放式数控系统中数控代码的解释与编译[J].机械设计与制造,2011(2):147-148.
Optimization Design of Precision Seeder Based on Multi-channel Routing Control
Zheng Shiyong1, Zhu Qiang2, Qin Deze1, Bao Xiulan3
(1.College of Computer Science & Information Technology,Hezhou University,Hezhou 452899, China; 2.College of Information & Business, Zhongyuan University of Technology,Zhengzhou 450007, China; 3.Huazhong Agricultural University,Wuhan 430070, China)
Abstract:In order to improve the quality of sowing peanut seeder seeding, improve working efficiency, control system in peanut sowing machine guide path and metering device, the introduction of multi channel independent communication principle, reducing the leakage rate of seeding process; fuzzy neural network control theory, combining the fuzzy domain structure of peanut seeder the nonlinear optimization design.In order to verify the reliability of the design of peanut sowing machine structure and control system, the field test of peanut planter, find the qualified rate was higher than that of the traditional seeding machine multi channel routing peanut seeder by experiment, the replay rate was significantly lower than that of the traditional sowing machine, the broken rate and hole rate is relatively low, the description of choice and path control metering seeder has reached the optimal, and it provides a theoretical basis for the research and design of the peanut planter.
Key words:precision seeding; fuzzy control; sowing quality; neural network; metering device; multi-channel routing
文章编号:1003-188X(2016)05-0138-05
中图分类号:S223.2+3
文献标识码:A
作者简介:郑仕勇(1983-),男,广西桂林人,讲师,硕士,(E-mail) zhengshiyong1983@163.com。
基金项目:湖北省自然科学基金项目(2014CFB322);广西科学研究与技术开发项目(桂科转1355009-9)
收稿日期:2015-04-15