大型农田激光测控精平机调平系统的设计与运动分析
2016-03-23孔德刚张国彬弋景刚齐彦龙
孔德刚,张国彬,弋景刚,齐彦龙
(1.河北农业大学 机电工程学院,河北 保定 071001;2.河北中农博远农业装备有限公司,石家庄 052160)
大型农田激光测控精平机调平系统的设计与运动分析
孔德刚1,张国彬2,弋景刚1,齐彦龙2
(1.河北农业大学 机电工程学院,河北 保定071001;2.河北中农博远农业装备有限公司,石家庄052160)
摘要:针对农田集中连片的建设要求以及高精度土地平整的特点,设计了一种农田激光测控精平机,该精平机采用双弹性扭杆独立调平系统,能够实现刀板两端的独立调整。地表平整精度的决定因素主要包括调平装置的竖直调整量和调整速度,该精平机有效地降低了刀板调整量;同时建立了调平系统的动作数学模型,对其进行了运动速度分析,确定了满足较高平整精度要求下的立缸调整速度。试验结果表明:该精平机能够很好地完成大面积农田高精度土地平整的农艺要求。
关键词:农田精平机;平整精度;弹性扭杆;独立调平;反应时间
0引言
“十二五”期间我国要建成4亿亩高标准农田,土地平整作为高标准农田建设的主要内容对未来农田建设的发展起着至关重要的作用。通过世界各国在土地平整方面的大量研究可知,激光平地技术可使平整后单位面积的农田节水40%,平地成本降低40%,劳动时间减少50%,肥料养分的利用率从原来的50%~60%提高到50%~70%[1-3]。因此,针对土地集中连片的建设要求,大型农田精确平整设备的研发显得尤为必要。
地表平整精度的决定因素主要包括调平装置的竖直调整量和调整速度,精平机采用激光测控技术达到高精度平整土地的目的,由于电信号的处理和电磁阀动作需要传递时间,当激光接收器接收到高程信息后,刀板动作需要一定的反应时间,精平机有作业速度,导致刀板动作时间相对检测到的高程信息存在一定的滞后现象,这就会影响到地表的平整精度。降低调平装置的调整量和选取恰当的调整速度对于精平机的作业性能至关重要。因此,针对农田平整的特点,设计出了双弹性扭杆独立调平系统,并在调整量和调整速度上对调平系统的平整精度做了进一步分析。
1激光测控精平机的调平要求
农田精平机侧重于土地的精确平整,与常规的工程平地机和农田拖拉式存在一些区别。工程平地机作为土方机械适用于构筑路基和路面、修筑边坡、开挖边沟以及进行土路和碎石路的养护工作,对刮刀的动作要求多,成本非常高。农田拖拉式平地机采用悬挂式,结构简单,质量轻,耗用钢材少,机动灵活;但纵向跨度小,平地铲与拖拉机后轮间的距离小,反仿形性能差,平整质量较差,适用于小块地作业。而农田精平机不仅要满足大面积农田地表的精平要求,同时要降低生产成本。主要设计要求如下:
1)平地刀板上下调整:平整深度的调整与非工作状态的抬起。
2)平地刀板两端独立调整:根据平地刮刀两端的高程信息,对其两端进行独立调整,使其两端在作业过程中始终保持水平。由于应用于精平作业,地表平整前的高程差应小于400mm。
3)平地刀板水平回转调整:根据平整深度,使其在工作过程中保持固定的回转角,将多余土壤分流到刀体一侧。
4)精平机作业速度能够达到45m/min。
2调平系统的结构组成及工作原理
2.1调平系统总体结构设计
大型农田激光测控精平机是一种集机械部分、液压部分、激光部分和控制部分于一体,能够实现高精度自动控制平整地表的平地机。采用控制器,借助激光系统与液压系统的相互配合,能够达到高精度平整土地的需求[4]。整机总体结构示意图如图1所示。

1.液压站 2.上挂座组件 3.激光接收器 4.高度调整支架
如图2所示,调平组件由弹性扭杆、扭杆前固定法兰和扭杆后固定法兰3部分组成。弹性扭杆前、后固定法兰内部装有花键套与锥套,弹性扭杆两端有花键齿。弹性扭杆抗拉强度很高,同时能够扭转弯曲变形,既能协助中梁起到刀板拉伸作用,提高系统稳定性,又能通过自身变形达到刀板两端独立调平的目的,而且弹性扭杆具有自动回位功能,大大节约了调平系统的动作时间。

1.扭杆前固定法兰 2.弹性扭杆 3.扭杆后固定法兰
2.2调平系统工作机理
左右双位激光接收器分别检测刀板两端的高程信息,将检测信号实时传递给PLC,其位置误差经PLC计算处理后发出调整信号,使相应电磁换向阀上电,进而控制液压回路的改变。对应的左右立缸按要求执行动作,带动调平组件运动。通过弹性扭杆前端的转动副、立缸上端和下端的双垂直转动副以及扭杆的复合变形,形成了调平组件两端竖直方向的独立调整,使其始终与激光平面保持平行。同时刀板与调平组件通过水平回转组件联系在一起,继而实现刀板在工作过程中严格按照设定作业平面进行土地平整,达到精平土地的目的。
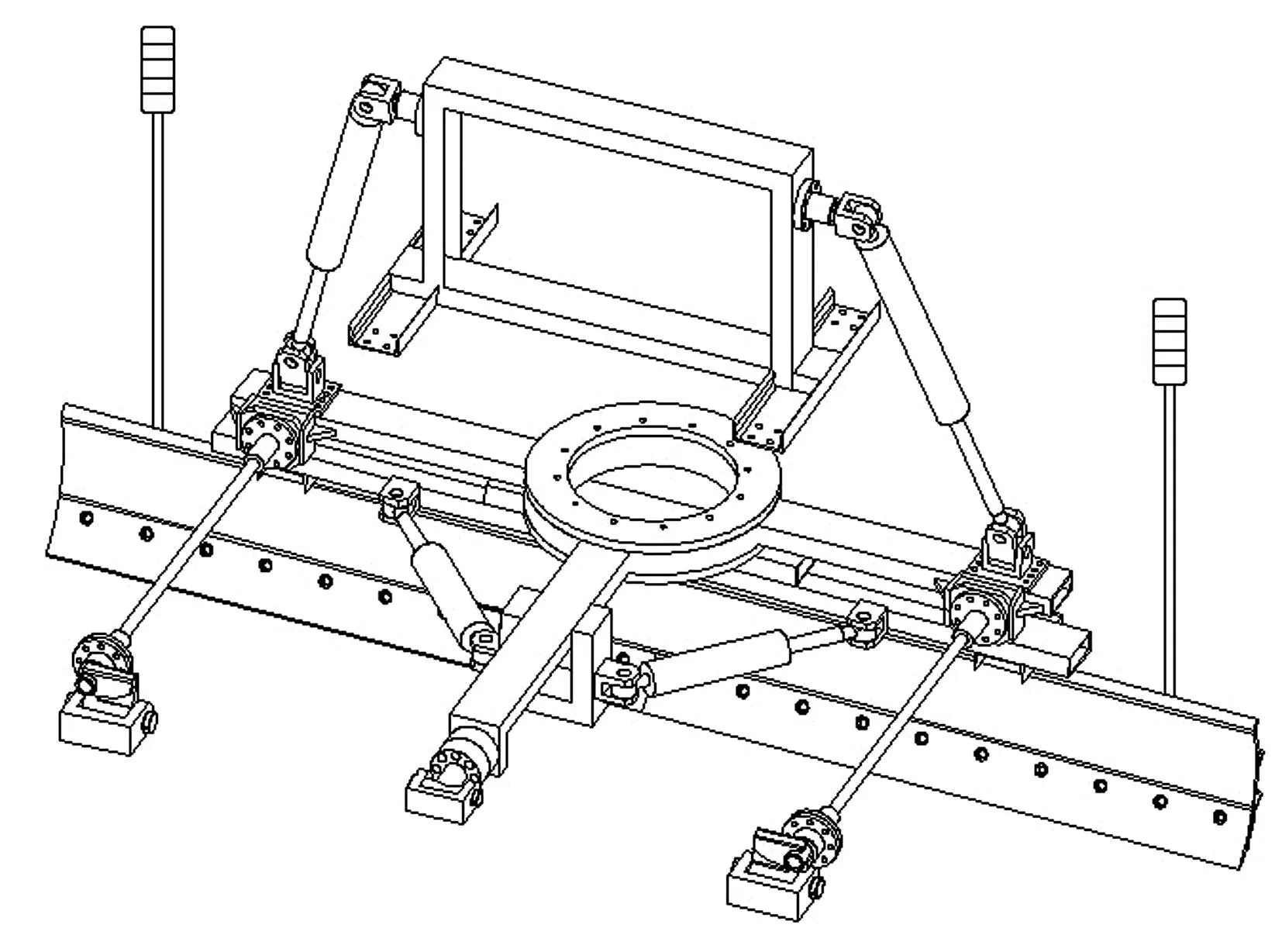
图3 精平机工作装置立体结构图
2.3调平系统调整量分析
平整精度是衡量精平机工作性能的主要标志,受限于行走速度的影响,即使调整速度很快,但瞬间产生的高程差也会反映到平整后的地表上,适当降低调整量是最有效的解决手段[5]。当精平机处于平直路面时,前轮最低点、刮刀刀尖和后轮最低点处于同一直线上,此时弹性扭杆处于水平位置。在实际作业过程中,地表有高低起伏,前轮会随地表不断地抬起或落下,这时独立调平系统控制刀尖在作业面附近做上下运动。
根据设计要求,地表的高程差在±200mm内,后轮在刮刀后方,处于平整后的地表。调平机构面临最大调整量H时前轮同时抬起200mm或降低200mm。当两前轮同时处于200mm凸起时,刀板抬起h,如图4所示。根据相似三角形原理,h/H=0B/0B'=1 260/3 600⟹h=70mm。同理当两前轮同时处于-200mm凹坑时,对应的刮刀刀尖下降70mm,成倍的降低了调平组件的调整量,节约了调平装置的反应时间。

图4 调整量分析示意图
3调平系统运动速度数学模型的建立
刀刃的竖直方向调整速度直接关系到地表的平整精度,取决于调平系统的调整速度,决定着刀板的反应时间。调平系统动力源为立缸,立缸带动调平组件实现刀板的动作调整,为了找到刀刃在竖直方向的速度规律,需找到立缸移动速度与刀刃竖直方向调整速度对时间的函数关系。
由于立缸绕上转动副做空间运动,以立缸的伸缩量为基准建立位置方程,从两个平面出发,一个是两立缸轴线所处平面(平面1);另一个是扭杆轴线所处的竖直平面(平面2),如图5所示。以扭杆工作位置(即水平时)为初始状态,立缸以速度v运动时,转臂产生竖直方向位移,转臂与刀刃通过刀板组件固定在一起。由于两立缸独立动作,调整规律不定,因此考虑两立缸同步动作,同样能反映立缸和刀刃间的对应变化关系。

(a) 平面1位置图
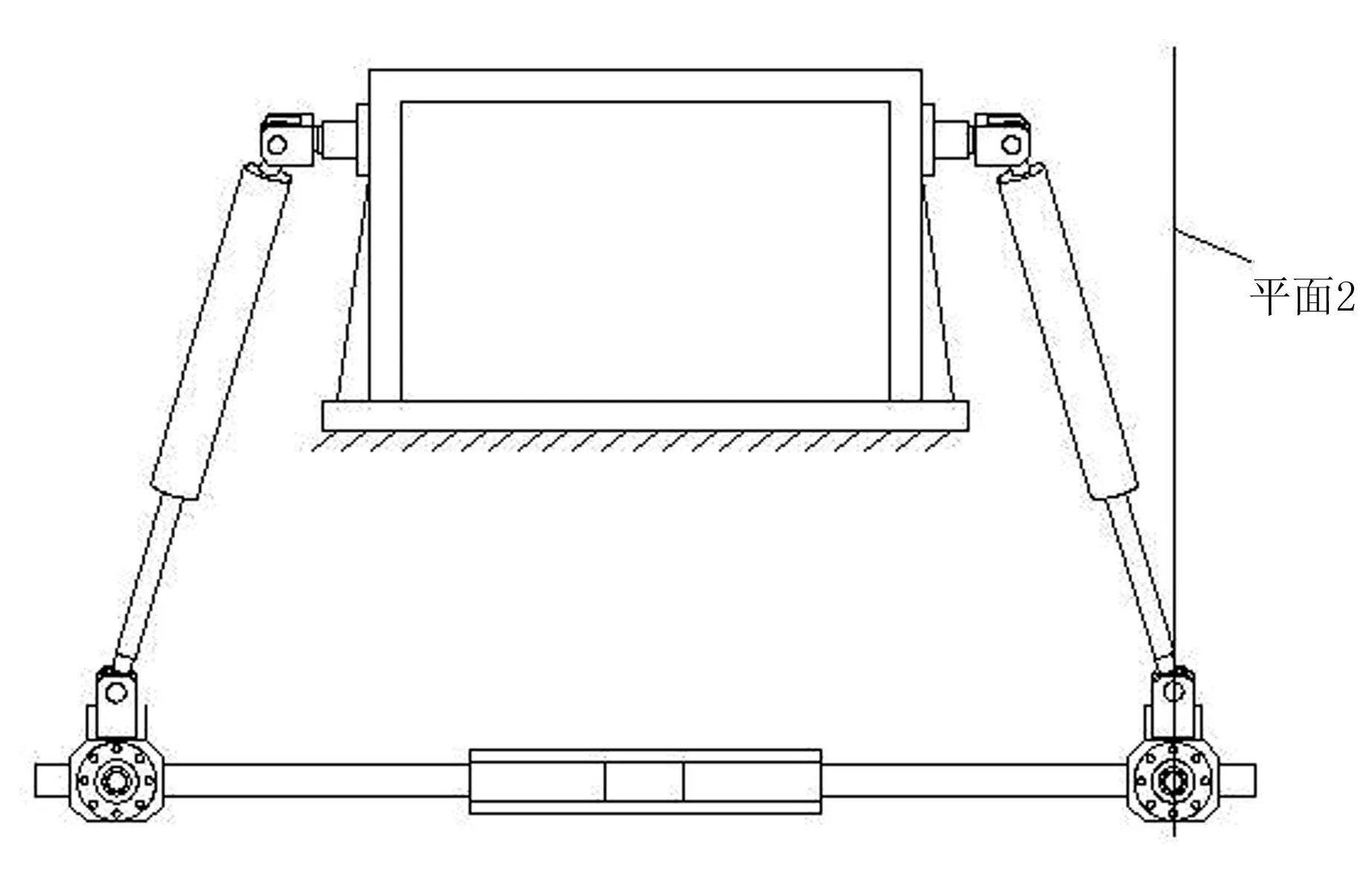
(b) 平面2位置图
平面1内的方程为
立缸调整后平面1的尺寸图,如图6所示。其中:LΔ为立缸活塞移动距离(mm);L0为初始上下转动副中心距(1 027mm);L1为移动后上下转动副的中心距(mm);h0为初始上转动副到转臂的距离(mm);h1为移动后上转动副到转臂的距离(mm);K为上转动副与下转动副的横向距离(280mm);v为立缸活塞移动速度(m/s);t为时间(s)。
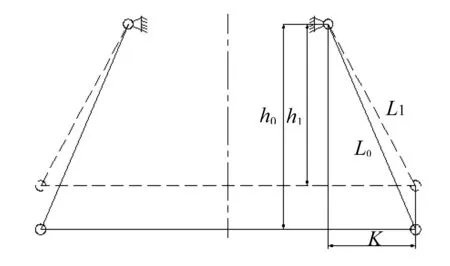
图6 立缸调整后平面1尺寸图
投影到平面2的方程为
立缸调整后平面2的尺寸图,如图7所示。其中:R为转臂绕转轴座转动半径(1 244mm);S为转轴座与上转动副中心距在平面2上的投影(1 554m);y为转臂竖直方向的位移(mm);α为初始R与S的夹角(°);β为转动后R与S的夹角(°)。

图7 立缸调整后平面2尺寸图
4调平系统运动速度分析
4.1独立调平系统模型的运动分析
从两组方程式中可以看到:v、t、y3个未知数,只有给定v值才能得出y与t的关系。假设立缸匀速运动,对立缸活塞的移动速度(v=30、40、45、50、60mm/s)进行赋值,并将位置参数代入组合方程式(1)、式(2),通过MatLab编程,得到刀刃在竖直方向位移图,如图8所示。通过位移-时间曲线可以明显看出刀刃在竖直方向上做匀速运动。

图8 不同速度下刀刃竖直方向的位移-时间关系
4.2立缸调整速度对平整精度的影响
激光接收器接收激光束,经控制器到电磁换向阀的电磁铁上电需要大约10ms,而电磁铁采用的直流电磁铁动作时间为0.05~0.08s,切换频率高。从阀芯动作完毕后到液压缸达到稳定的移动速度大约需要0.6~0.8s的时间,3个时间总和不足1s[8]。刀刃竖直位移最大调整量为70mm,精平机工作行驶速度设计要求为45m/min。在立缸活塞的移动速度在40~50mm/s时,调整竖直最大位移精平机的移动距离在1.51~1.75m,进一步提高调整速度,精平机行走距离变化不大。如果调整速度过快,立缸移动的惯性就会大大增加,出现调过现象,反而影响平整效果。设计的液压系统立缸的调速范围在45mm/s左右时就能满足高的平整要求,不同立缸活塞移动速度下精度控制参数如表1所示。表1反映的是最大调整量下精平机的行走距离,是调整的极限境况,而在实际作业过程中,地表的变化是一个渐变过程,调平系统调整量也是缓变的,不会出现瞬间的大幅度调整。因此,实际作业过程中调平装置能够达到较高的平整精度。
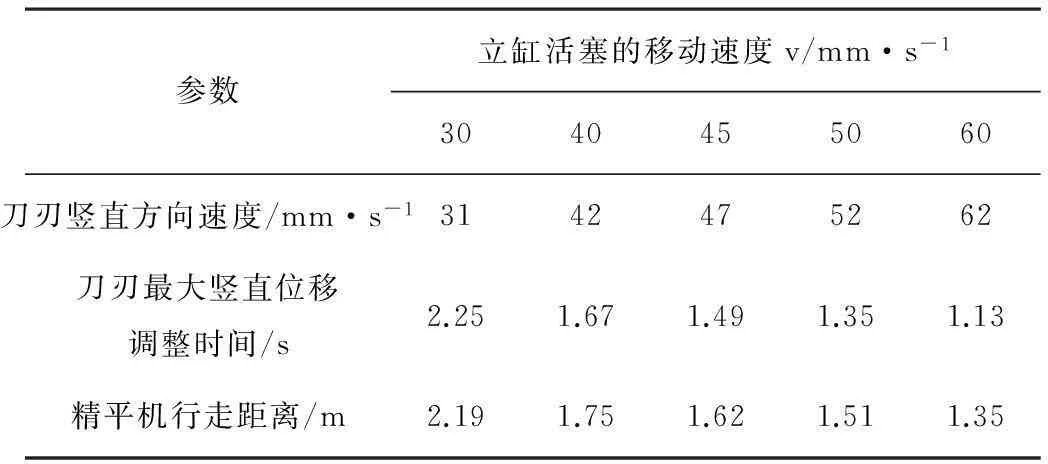
表1 不同立缸活塞移动速度下精度控制参数
5结论
1)设计了双弹性扭杆独立调平系统,提高了平地系统的稳定性,通过弹性扭杆的变形达到刀板两端独立调平的目的,且具有自动回位功能,大大节约了调平系统的动作时间,且成本较低。
2)该调平系统能够成倍降低调整量。通过调平系统的动作数学模型,结合精平机作业速度,确定了立缸活塞移动速度范围在45mm/s左右。
3)试验表明:采用双弹性扭杆独立调平系统的精平机能够很好地完成大面积农田高精度平整的农艺要求,在工作半径100m范围内,排除奇异点后地表的高程差控制在±15mm以内。
参考文献:
[1]许迪,李益农,刘刚.激光控制农田土地精细平整应用技术体系研究进展[J].农业工程学报,2007,23(3):267-272.
[2]Finney C.The benefits of land leveling on irrigation schemes in Turkey and Sindh Province,Pak istan[J]. IC ID Journal,1996,45 (1):1523-1539.
[3]李益农,许迪,李福祥.田面平整精度对畦灌性能和作物产量影响的试验研究[J].水利学报,2000(12):82-87.
[4]张辉.激光平地技术在土地平整工程中的应用探讨[J].甘肃水利水电技术,2009,45(8):36-36.
[5]王冬春,秦小华.水泥混凝土路面滑模摊铺平整度控制措施[J].中国新技术新产品,2010(12):53.
[6]孔德刚,弋景刚,崔保健,等.大型农田清平机工作装置液压系统的设计[J].液压与气动,2013(10):66-69.
[7]刘刚,林建涵,司永胜.激光控制平地系统设计与试验分析[J].农业机械学报,2006,37(1):71-74.
Abstract ID:1003-188X(2016)05-0098-EA
Design and Motion Analysis of Leveling System for Large Farmland Laser Measurement and Control Leveling Machine
Kong Degang1,Zhang Guobin2,Yi Jinggang1,Qi Yanlong2
(1.Mechanic and Electronics College, Agriculture University of Hebei, Baoding 071001,China;2.Hebei Sino-Agri BOYO Agricultural Equipment Ltd, Shijiazhuang 052160,China)
Abstract:Focus on contiguous farmland for construction requirements and characteristics of high land leveling precision,a farmland laser measurement and control leveling machine is designed. To achieve the ends of the blades adjusted independently, the leveling machine employs independent leveling system of double elastic torsion bar.The determinants of leveling precision for surface flatness include vertical adjustment amount and speed of adjustment about leveling device. The blades adjustment is reduced by style of leveling machine,while establishing a leveling system moves mathematical model to analyze its movement speed.The vertical cylinder speed adjustment is determined to satisfy the requirement of high leveling precision.The results showed that the leveling machine can well complete the sooth operation of the whole farmland leveling for agronomic requirements.
Key words:farmland leveling machine; leveling precision; elastic torsion bar; independent leveling; reaction time
文章编号:1003-188X(2016)05-0098-04
中图分类号:S222.2
文献标识码:A
作者简介:孔德刚(1986-),男,河北任丘人,助教,硕士研究生,(E-mail)kdg198615@163.com。通讯作者:弋景刚(1961-),男,河北沧州人,教授,(E-mail)yjg@hebau.edu.cn。
基金项目:河北省重大科技成果转化专项(15047204Z);河北省科学技术研究与发展计划项目(11212106D)
收稿日期:2015-04-09
