基于最小相切圆和形态学相结合的作物行检测算法
2016-03-23刁智华吴贝贝毋媛媛赵明珍钱晓亮魏玉泉
刁智华,吴贝贝,毋媛媛,赵明珍,钱晓亮,魏玉泉
(1.郑州轻工业学院 电气信息工程学院,郑州 450002;2.河南省信息化电器重点实验室,郑州 450002)
基于最小相切圆和形态学相结合的作物行检测算法
刁智华1,2,吴贝贝1,2,毋媛媛1,2,赵明珍1,2,钱晓亮1,2,魏玉泉1,2
(1.郑州轻工业学院 电气信息工程学院,郑州450002;2.河南省信息化电器重点实验室,郑州450002)
摘要:机器视觉的农业导航路径规划是精准施药的关键,而作物行提取是其准确识别作物行路径的基础。为此,以玉米为研究对象,提出了一种基于最小相切圆原理和形态学相结合的作物行检测算法。首先在室外田间环境下采集生长早中期的玉米作物行图像,选择作物行比较规整的图像进行处理;其次,利用改进的超绿灰度化(1.8R-G-B)算法对玉米作物行图像进行灰度化处理,大大减少了噪声的干扰,通过中值滤波基本消除了噪声;然后,运用Otsu阈值算法获取了玉米作物行的二值图像。由于作物行呈线型,在此基础上,采用5×1像素的线型结构元素和3×3像素的方形结构元素两者相结合的方法对二值图像进行腐蚀、膨胀运算,并采用提出的最小相切圆与形态学结合的方法提取中央玉米作物行的骨架并进行中央作物行直线的拟合。实验表明:该算法能提供准确的位置信息,且对作物行边缘噪声具有较强的抗干扰能力,对进一步研究精准施药提供了参考依据。
关键词:精准施药;1.8R-G-B法;骨架提取;最小相切圆;形态学细化
0引言
精准施药技术是实现精准农业的重要部分,有利于减少环境污染、保障人类健康安全。在农业机械精准施药过程中,为了提高施药的精准度,作物行提取是关键,对农业机械自动对行行走起着至关重要的作用[1]。日本东京大学[2]研究者对作物行进行边缘检测,将运用最小二乘法拟合出的导航线应用于精密喷洒系统。马红霞等[3]针对单一作物行采取水平分割图像的方法找到定位点,从而拟合出作物行线。
本文对多行玉米植株图像通过改进的超绿灰度化法、中值滤波及Otsu阈值算法3个步骤使背景与作物行完全分割开来;运用作物行呈线型的特点,采用5×1像素的线型结构元素和3×3像素的方形结构元素两者相结合的方法对二值图像进行腐蚀、膨胀运算;最后运用最小相切圆与形态学相结合的方法进行中央玉米作物行提取,对不同区域的玉米作物行进行了实验分析。结果表明:该算法具有较好的适应性和准确度。
1玉米作物行图像采集
1.1颜色模型选取
农田图像的获取是图像处理的第一步。实验以北方玉米作物行为研究对象,采用维视数字图像技术有限公司生产的型号为MV-VD030SM/SC的USB2.0接口的CCD工业数字相机及艾菲特光电技术有限公司生产的型号为AFT-0641MP的工业镜头对田间自然环境下的玉米作物行图像进行采集。相机拍摄的高度距地面约为1.8m,输出的图像是8位RGB彩色图像。由于RGB模型颜色信息获取比较直接,无需转换,所以本算法选择RGB彩色图像进行直接处理。
1.2实验开发平台
本研究用于处理玉米作物行图像的计算机环境设置为Intel(R)Core(TM) i3,3.1GHz,2G内存。以WIIN7系统下Microsoft Visual C++6.0为实验平台,基于MFC应用程序框架对作物行骨架提取算法进行研究和开发。
2玉米作物行图像分割
2.1图像灰度化
采集到的玉米作物行图像包含了许多彩色信息,但在对图像进行处理和分析时并不需要这些信息,而把彩色图像转换为灰度图像更有利于后续作物行的提取。本文对常用过的绿特征灰度化法[4]和改进的灰度化算法分别进行了对比,如图1所示。采用普通的超绿灰度化算法[5]虽然可以区分出作物行,但行间仍夹杂着许多噪声。本文对2G-R-B算法进行了改进,改进后的具体灰度化算法为

(1)
从改进后的算法处理的图像可以看出:使用本文改进的算法玉米作物行更为突出,且行间噪声有明显的减少;处理同一幅图片,改进后的算法处理时间为2ms,改进前为5.6ms,运算效率明显有了提高。

(a) 玉米作物行原图
(b) 普通超绿灰度化图像

(c) 改进后的超绿灰度化图像
2.2滤波除噪
由于灰度化后的图像上仍有噪声存在,影响对目标的处理,所以本文选取3×3数组窗口对其进行中值滤波,并采用冒泡法对数组进行排序后返回数组元素的中值。经2次滤波后图像中的噪声基本去除,满足了后续对作物行处理的需求,如图2所示。
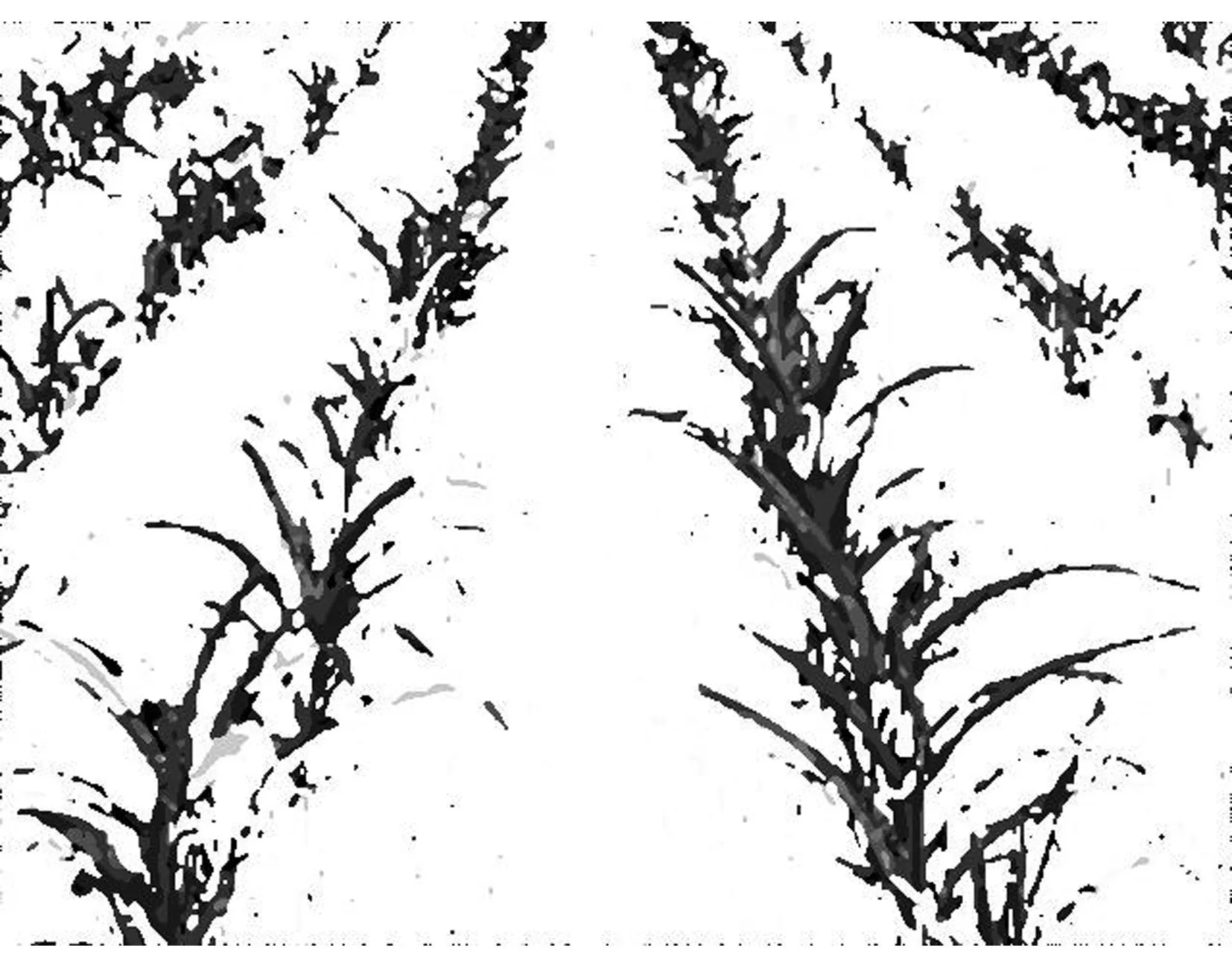
图2 中值滤波后的作物行图像
2.3灰度二值化
为了将背景和作物行完全分割开来,进一步提取行信息,需要进行二值化处理。 本文将大于设定阈值的像素值设为255;相反,将小于它的像素值设为0。由于行目标与背景有较大的差别,可以采用设定阈值和Otsu算法[6]对其二值化处理,处理后的图像如图3所示。
(a) 阈值为185时的二值图像
(b) Otsu算法处理后的二值图像
经比较发现:当阈值设定为185时,两种方法处理效果差不多,对后期处理没影响。Otsu算法不需要人为设定阈值,是一种自适应阈值确定的方法,计算方法简单、适应性强且稳定,所以本文采用Otsu算法对图像进行二值化处理。
3作物行提取
3.1改进的形态学去噪
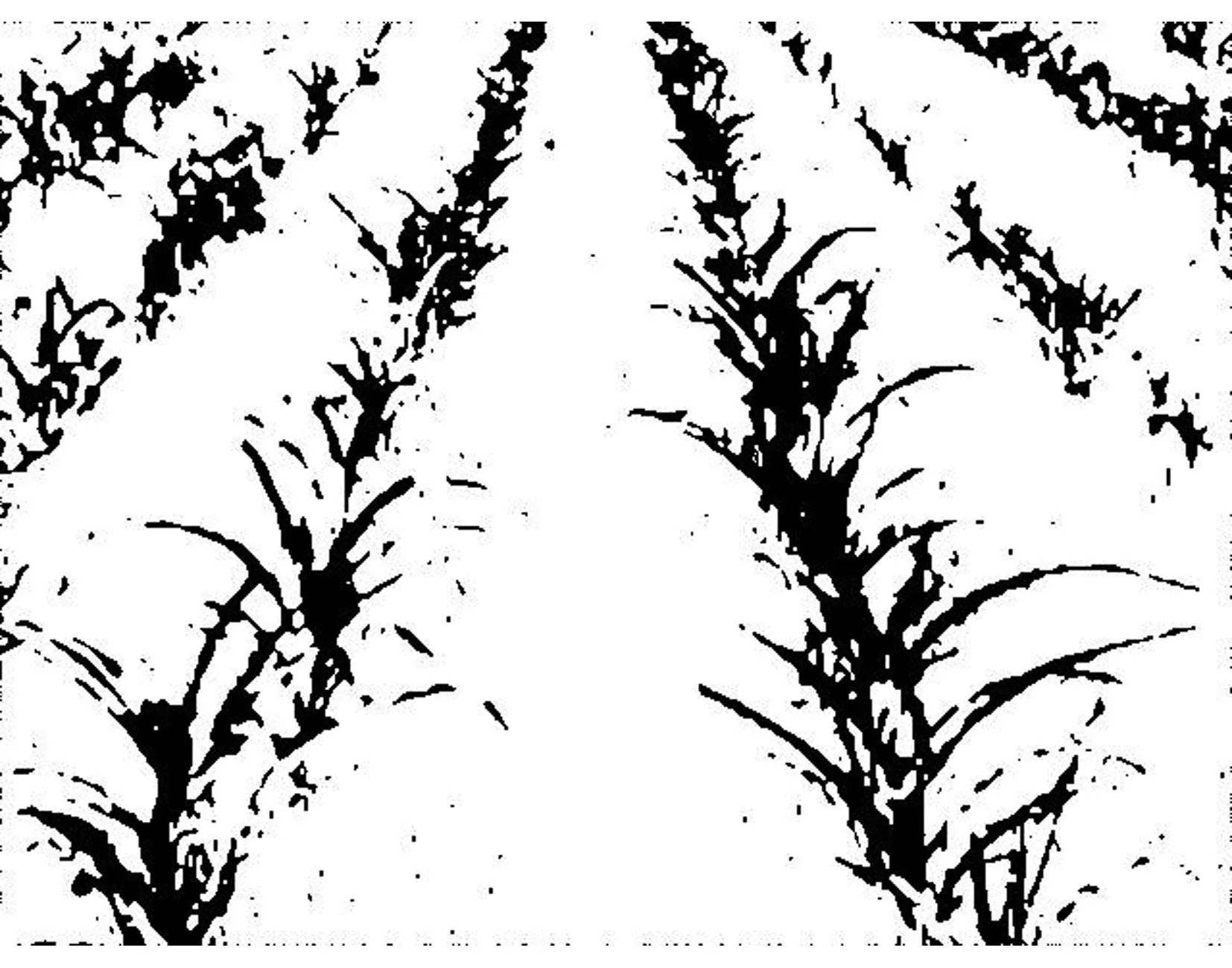
玉米作物行图像经二值化处理后,背景与行信息很清晰地分割开来,但选取的玉米植株叶片较大且相互交叉。影响作物行中心骨架的提取,为了能更准确地提取出作物行骨架,依据作物行本身为线型的特点,在保证不改变和消除作物行有用信息的前提下,本文采用5×1线型结构元素和3×3方形结构元素两者相结合的形态学方法对其进行腐蚀、膨胀操作。特别针对同行玉米植株间有间断的地方,运用5×1线型结构元素可以很好地连接间断区域,保持了连通性;针对较大叶片玉米植株运用5×1线型结构元素进行腐蚀处理可以有效地避免大叶片对行中心线骨架的提取造成的误差[7]。与此同时,运用3×3方形结构元素可以填补图像中的孔洞和孤立点,弥合细小缝隙。通过实验,本文先对二值化后的图像进行5×1的垂直方向2次腐蚀,再进行3×3的8次膨胀运算,然后进行5×1水平方向2次膨胀,最后再进行3×3的8次腐蚀操作,得到的作物行轮廓如图4所示。从图4中可以看出:本文采用的5×1和3×3结构元素相结合的方法,很好地连通了中央玉米植株间有间断的地方,为后续准确提取中央作物行做了准备工作。

图4 玉米作物行的形态学处理图
3.2中央作物行骨架提取
3.2.1最小相切圆原理
农业机械导航在玉米精准施药时要对准中间两行[8]。导航的路径是一种线性结构信息,所以本文在检测玉米作物行时,首先应对作物行轮廓进行细化处理,也就是所谓的骨架化。骨架提取的算法有多种,如最大圆盘法、数字距离变换法和拓扑细化法是常用的骨架提取法。最大圆盘法所提取的骨架不仅连通性差,而且通常较粗,无法满足单一像素宽度的需求;距离变换法是利用距离场中的局部极值点的集合作为骨架,虽然在准确度上有明显优势,但难以保证连通性;拓扑细化法虽然能保持提取骨架的连通性及拓扑结构性,但提取的骨架位置不精确。
针对以上问题,本文提出一种最小相切圆原理与形态学相结合的方法来提取中央作物行骨架,图5为最小相切圆的原理模型图。假设a、b、c、d4条线为玉米作物行,以作物行(即a、b、c、d4条线)底部中心为基准找与作物行相切的所有圆,则圆O1即为要找的最小相切圆,切点M、N就是所要找的点,也即是中央作物行上的点。

图5 最小相切圆模型
3.2.2提取步骤
由于精准施药的农业机械是不断行走的,进行精准施药时只需对准中间两作物行即可,则可以运用上述提出的最小相切圆原理进行中央作物行的骨架提取。其步骤如下:
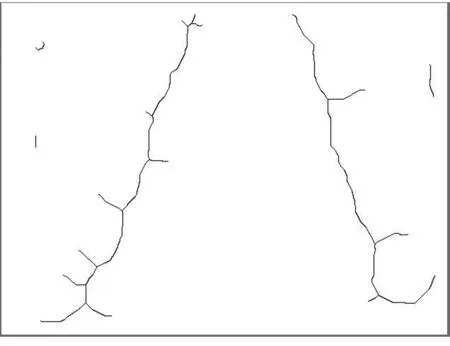
1)首先,运用形态学细化法提取出所有作物行的骨架,如图6(a)所示;
2)然后,从图像底部中心向作物行两边自下向上进行扫描,找出能与作物行两边相切的最小圆;
3)记下所有与最小圆相切的切点。与此同时,腐蚀掉其余不满足条件的像素点,那么这些满足条件的像素点的集合就组成了中央作物行的骨架。提取结果如图6(b)所示。
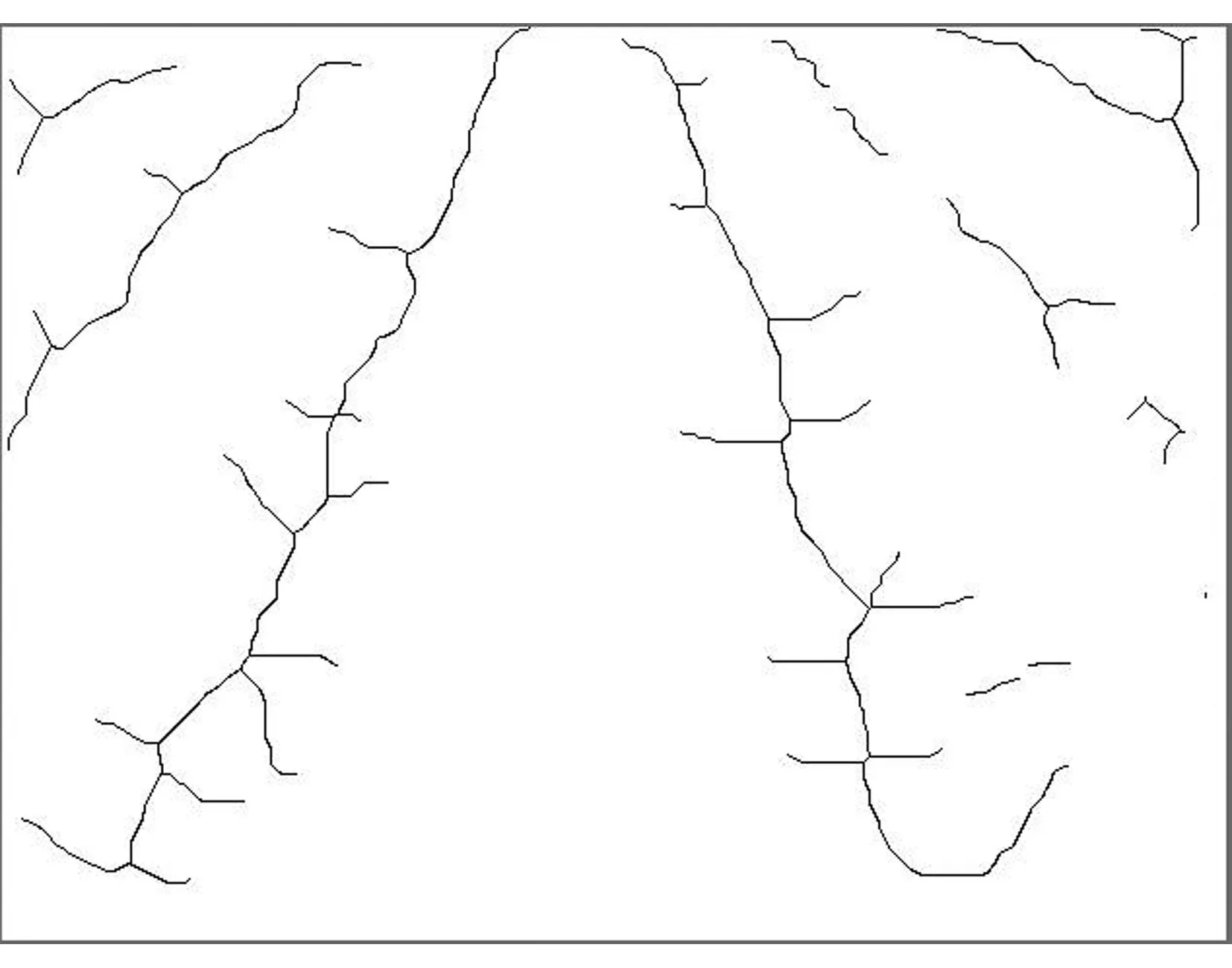
(a) 玉米作物行骨架图像
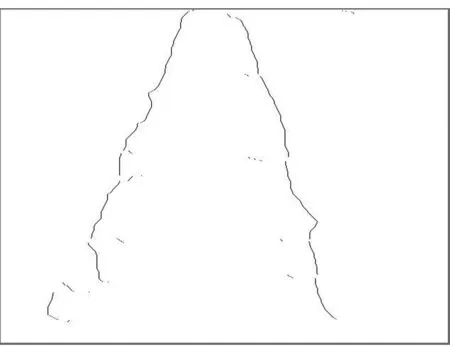
(b) 中央作物行骨架
3.3中央作物行直线拟合
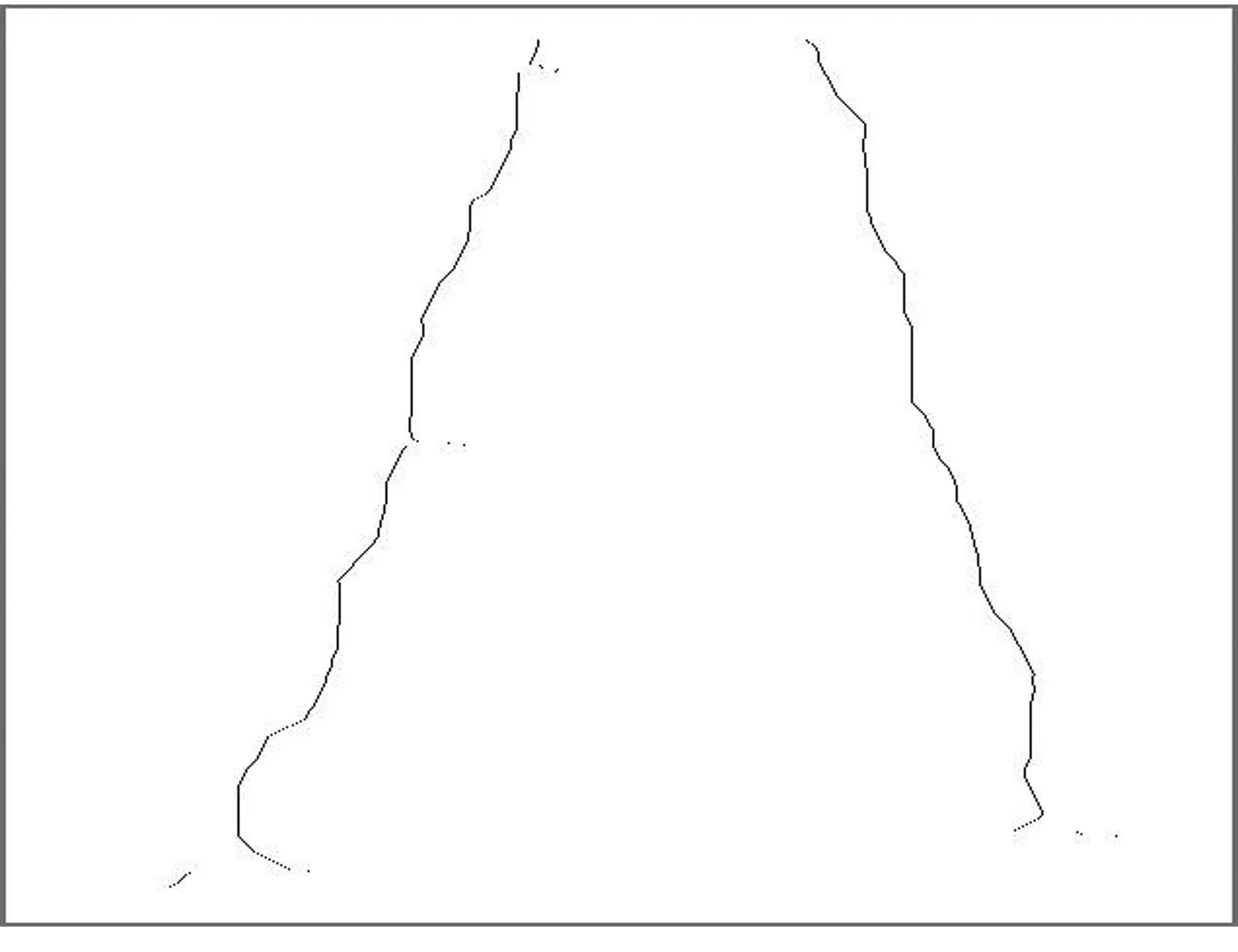
中央作物行的直线拟合方法有多种,而随机Hough变换具有计算简便、运算速度快等优点,因此采取常用的随机Hough变换算法把主干骨架拟合成直线,如图7所示。
3.4其他区域提取结果
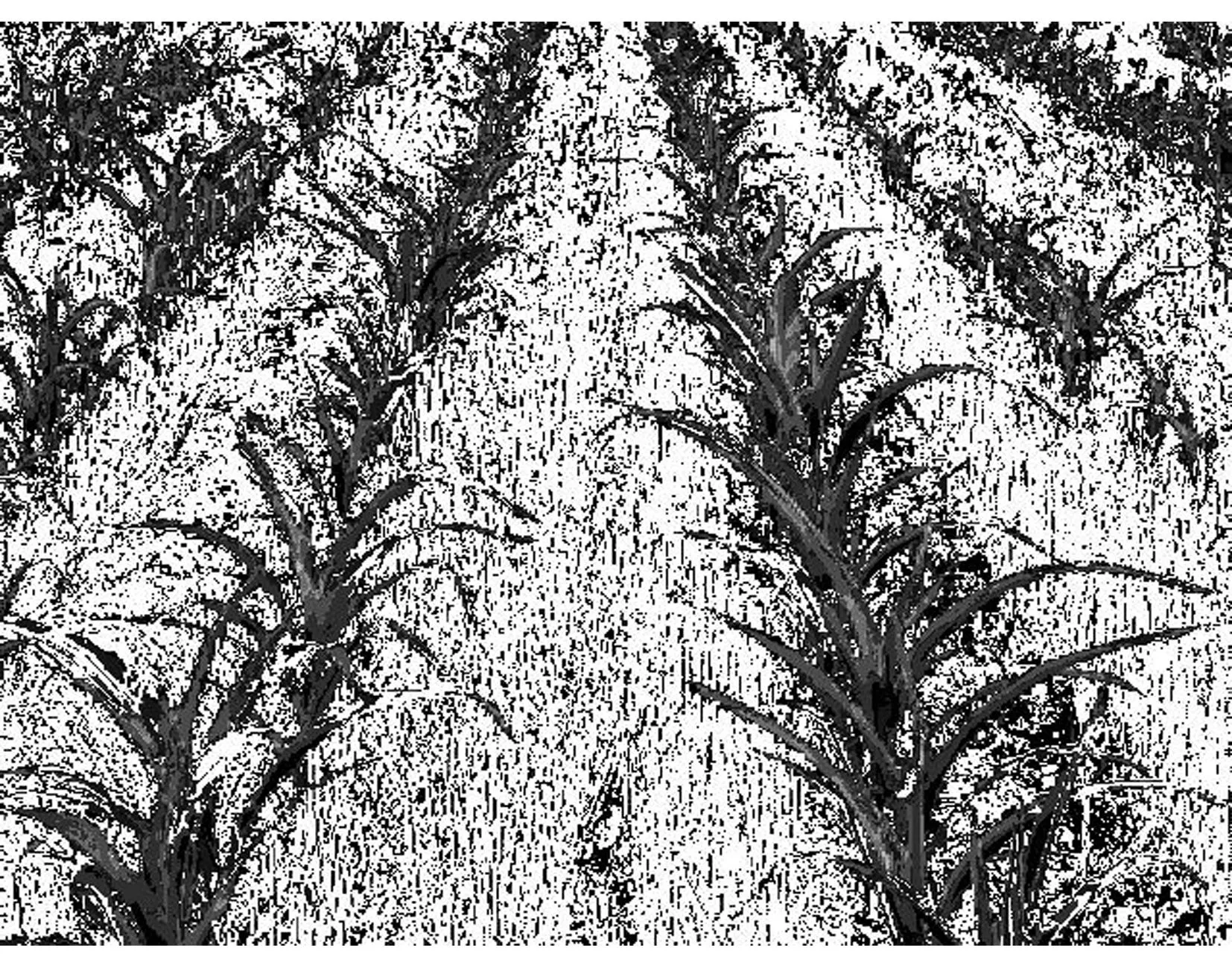
为了验证该算法同样对其他区域玉米作物行也有效,选取了160cm×135cm的玉米作物行图像进行了相同的处理,处理的结果如图8所示。
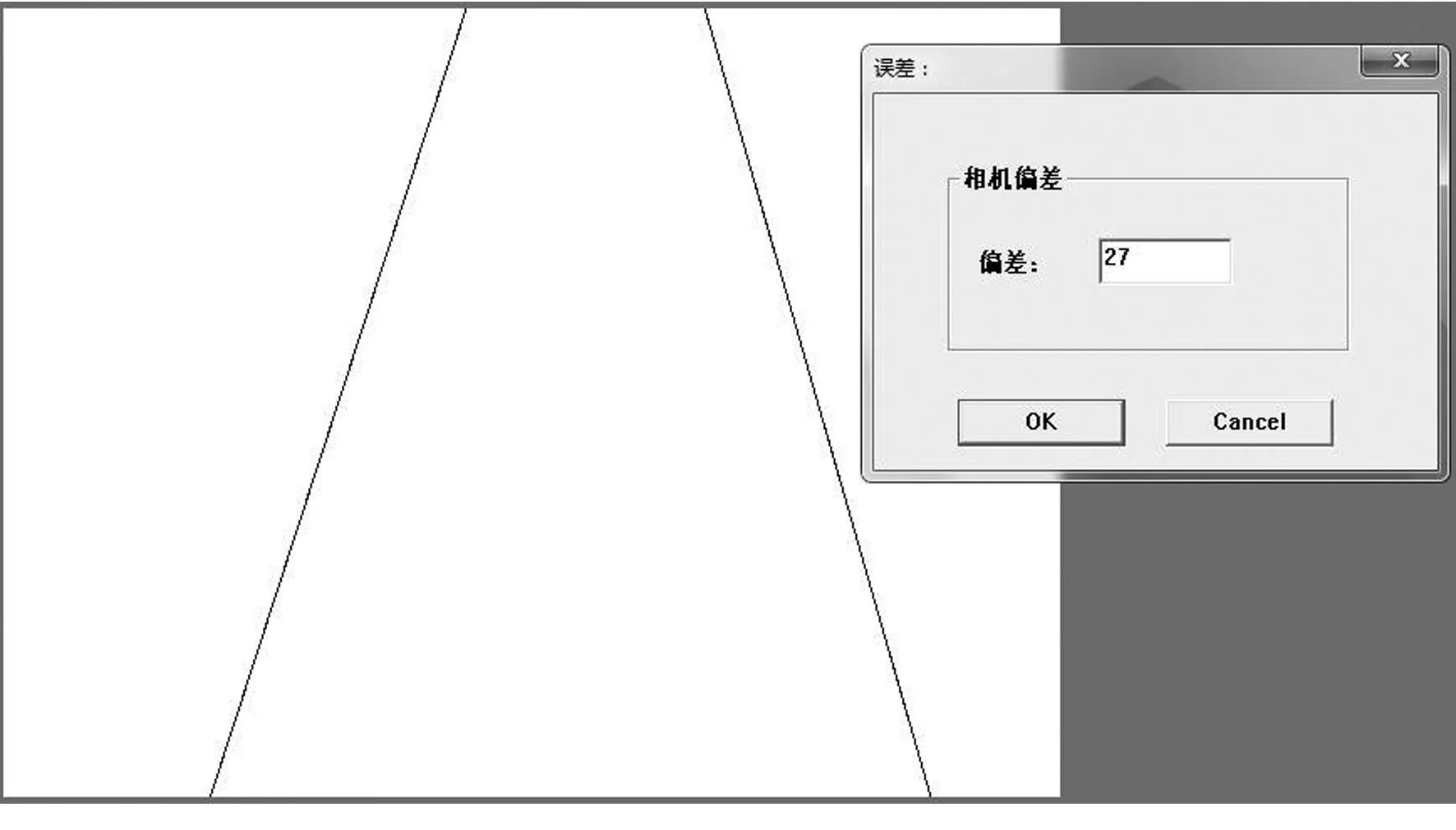
4实验偏差分析
由于相机安装在精准施药机械上,当机械进行作业行走时,相机拍摄到的图像底部是呈垂直拍摄的,所以选取中央作物行直线的底端中点与相机的位置偏差来分析作物行检测的精准度更能说明问题。
针对两幅不同区域内的玉米作物行图像,分别进行了偏差分析,结果如表1所示。

(a) 原玉米作物行图像
(b) 作物行骨架提取图像
(c) 中央作物行骨架提取图像
(d) 中央作物行直线拟合
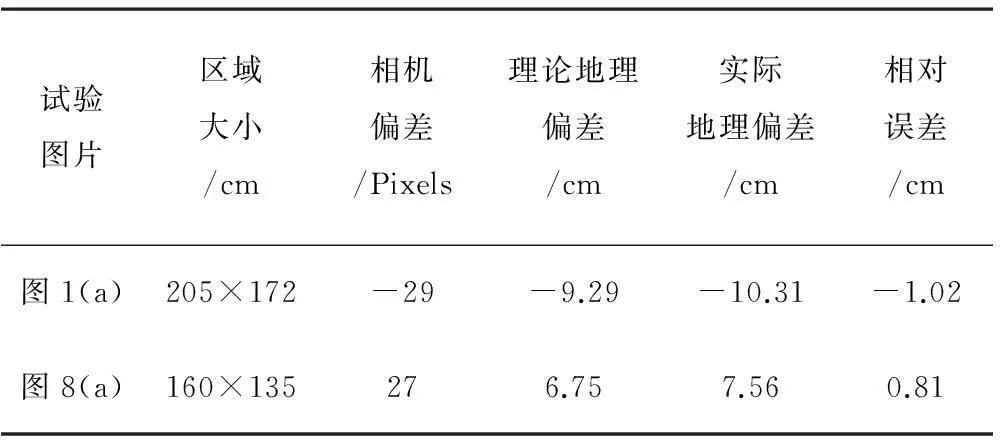
试验图片区域大小/cm相机偏差/Pixels理论地理偏差/cm实际地理偏差/cm相对误差/cm图1(a)205×172-29-9.29-10.31-1.02图8(a)160×135276.757.560.81
5结论
1)运用改进的超绿算法对玉米作物行图像进行了灰度化处理,大大减小了行间噪声,为后续形态学去噪减少了不必要的麻烦。
2)运用5×1线型结构元素和3×3方形结构元素相结合的方法对二值化图像进行腐蚀、膨胀运算,得到作物行的大概轮廓,并对其进行细化处理。
3)运用最小相切圆和形态学相结合的方法提取中央作物行骨架,并对其进行直线拟合;运用实际地理偏差与理论地理偏差的差值来判断作物行检测的准确度。
4)该算法能够较准确地检测出玉米作物行,且平均处理时间为260ms左右,较好地保持了行目标的主要拓扑结构,为将行信息应用于实时目标的识别提供了理论支持。
参考文献:
[1]祖琴, 陈湘萍, 邓巍.光谱图像技术在精准施药中的应用[J].农机化研究, 2013, 35(3):19-23.
[2]Toru Torii. Research in autonomous agriculture vehicles in Japan[J].Computer and Electronics in Agriculture, 2000, 25(1):133-153.
[3]马红霞, 马明建, 马娜, 等.基于Hough变换的农业机械视觉导航基准线识别[J]. 农机化研究, 2013, 35(4):37-40.
[4]刘阳, 高国琴.农业机械视觉导航基准线识别研究进展[J].农机化研究, 2015, 37(5):7-13.
[5]张勤, 黄小刚, 李彬.基于彩色模型和近邻法聚类的水田秧苗列中心线检测方法[J]. 农业工程学报, 2012, 28(17):163-171.
[6]张志强, 宋海生.应用Ostu改进Canny算子的图像边缘检测方法[J].计算机与数字工程, 2014, 42(1):122-128.
[7]林德贵, 曾健民.基于数学形态学的提升小波图像去噪[J].计算机技术与发展,2013, 23(5):83-85.
[8]黄宝贵, 马春梅, 卢振泰.新的形态学图像降噪方法[J].计算机应用, 2011, 31(3):757-759.
A Crop Row Detection Algorithm Based on Minimum Tangent Circle and Morphology
Diao Zhihua1,2, Wu Beibei1,2,Wu Yuanyuan1,2, Zhao Mingzhen1,2,Qian Xiaoliang1,2,Wei Yuquan1,2
(1.Electric Information & Engineering Department,Zhengzhou University of Light Industry, Zhengzhou 450002,China; 2.Henan Key Lab of Information Based Electrical Appliances,Zhengzhou 450002,China)
Abstract:Path planning in agricultural machine vision navigation is the key to accurate spraying, but the crop rows detection is the basis for accurate identification of crop rows path.Taking corn as the research object, the paper propose a crop row detection algorithm based on minimum tangent circle and morphology.First, collected corn crop image growing early and middle time in the outdoor environment, choose the crop rows that more structured to process, and secondly, using the improved 1.8R-G-B algorithm to realize gray transformation,greatly reducing the noise and by median filtering eliminate the noise virtually.And then use the Otsu threshold algorithm to obtain a binary image of the corn crop rows. Because crop rows is linear, on this basis, using the method that combine linear structure element 5 × 1 pixel with square structure that 3 × 3 pixel to conduct erosion and dilation.Finally,we use this method based on minimum tangent circle and morphology to detect central line skeleton and fitting the line of the crop.Experiments show that the algorithm can provide accurate location information, and to the noise on the edge of the crop rows has a strong anti-jamming capability, provides reference for further research in precision pesticide.
Key words:precision spraying; 1.8R-G-B method; skeleton extraction; the minimum tangent circle; morphological thinning
文章编号:1003-188X(2016)05-0015-05
中图分类号:S126;S365
文献标识码:A
作者简介:刁智华(1982 -),男,河南夏邑人,副教授,博士,(E-mai)diaozhua@163.com。通讯作者:吴贝贝(1989 -),女,河南夏邑人,硕士研究生,(E-mail)hncjwbb@163.com。
基金项目:国家农业智能装备工程技术研究中心开放基金项目(KFZN2012W12-012);河南省科技厅重点科技攻关项目(132102110150);郑州市科技局普通科技攻关项目(131PPTGG411-13);郑州轻工业学院研究生科技创新基金项目(2014003)
收稿日期:2015-04-27
