农用无人机纵向姿态控制系统设计及仿真
2016-03-23张长利王树文王润涛张伶鳦栾吉玲周雅楠
刘 超,张长利,王树文,王润涛,张伶鳦,吕 涛,栾吉玲,周雅楠
(东北农业大学 电气与信息学院,哈尔滨 150030)
农用无人机纵向姿态控制系统设计及仿真
刘超,张长利,王树文,王润涛,张伶鳦,吕涛,栾吉玲,周雅楠
(东北农业大学 电气与信息学院,哈尔滨150030)
摘要:针对农用无人机的作业特点和应用领域,设计了一种基于经典PID控制方法的纵向姿态控制系统。首先,利用MatLab软件建立了无人机在配平点处的纵向运动数学模型,分析了无人机的纵向运动规律。在此基础上,采用经典PID理论对无人机纵向运动的俯仰角控制回路和高度控制回路进行设计。通过Simulink软件进行仿真实验,结果表明:该飞行姿态控制系统控制效果良好,可以满足农用无人机的技术要求。
关键词:农用无人机;纵向姿态;PID控制,仿真
0引言
农用无人机是现代农业系统中的重要组成部分,具有中低空飞行、巡航速度低、载重量大的特点[1]。无人机在空中的正常作业依赖于无人机本身是否具有一套合适的飞行姿态控制系统。梅劲松[2]等利用特征模型和模糊控制对无人机的飞行姿态进行控制。唐胜景、宋祥[3]等设计了模糊-积分混合控制器,并利用遗传算法对无人机飞行姿态进行较精确的控制。以上技术的运用虽然较稳定地控制了无人机的飞行姿态,但主要采用工业和军事等领域的控制方法,开发难度较大,操作复杂度高,不适于大范围面向农业应用。农用无人机面向民用领域,要求系统具有高效、稳定和实际应用性强的特点,所以设计一种适用于农用无人机的姿态控制系统是十分必要的。
本设计考虑到无人机的应用领域及操作对象,选择利用经典PID控制方法设计农用无人机纵向控制系统,为解决上述问题提供了新的思路和方法。此方法具有操作简便、实用性强、造价低且性能稳定的特点,可以满足无人机在空中作业的技术要求。在设计过程中,采用了MatLab软件对样机进行数学建模,得到无人机的纵向运动数学模型;再利用Simulink仿真环境进行仿真,逐步调节各项参数,提高了无人机飞行姿态的稳定性。
1农用无人机纵向运动数学模型的建立
无人机的运动方程以微分方程的形式体现无人机的状态参数随时间变化的规律[4]。在无人机的建模仿真中,以无人机的运动方程为基础,推导传递函数来进行仿真,从而判断所设计的控制系统是否稳定可控。所以,建立无人机数学模型是至关重要的。
1.1 农用无人机运动的假设
由于农用无人机本身是一个复杂的动力学系统,在飞行过程中各参数受到机身质量、结构、所处环境、地球曲率、重力加速度及高度等时变因素的影响。如果将这些因素全部考虑在建立运动方程中,将是极其复杂而且不利于分析的。但是,在农用无人机特定的运动规律中,受到以上因素的影响极小,所以本文忽略以上因素对分析飞行的影响[5]。
1.2 农用无人机纵向非线性模型常用坐标及参数
分析农用无人机运动规律一般需要的坐标系分别是地面坐标系和机体坐标系[6]。
无人机参数包括姿态角、气流角、机体坐标系的速度分量和机体坐标系角速度分量。姿态角由机体坐标系和地面坐标系的关系确定,包括俯仰角θ、偏航角φ和滚转角φ。空速V与机体坐标系之间的关系确定了气流角(迎角α和侧滑角β)。机体坐标系角速度分量(p,q,r)是无人机飞行过程中相对于地面坐标系转动角速度ω在机体坐标系各轴上的分量。机体坐标系的速度分量(u,v,w)是无人机上空速计所测得的空速在机体坐标系各轴上的分量[7]。
1.3 农用无人机纵向数学模型的建立
根据运动学方程和动力学方程确定了无人机的运动方程,运动方程确定了输出向量与输入量之间的非线性函数关系。在建立农用无人机的非线性数学模型时,只需要确定无人机的相关飞行参数,就可以得到飞机任意时刻的飞行状态[8]。
运动学方程主要根据牛顿第二定律建立起来,表示作用在飞机上的力和力矩,其表达式为
(1)
其中,Fx、Fy、Fz是作用在无人机上的力矩,m为实验无人机质量。
(2)
其中,Mx、My、Mz为无人机所受力矩;I为各轴转动惯量。
动力学方程主要表示角速度分量在各坐标系之间的转换关系,分为角运动和线运动。角运动中3个角速率表达式为


(3)
(4)
研究无人机的纵向运动时,需要去除横向运动的影响。这时,飞行器进行的是无滚转和无侧滑运动,即φ=β=0。将以上建立的无人机运动方程化简解耦为纵向运动表达式,如式(4)所示。其中,D为机体受到的阻力;T为发动机推力;L为机体所受升力。其他变量在上述推导中已经注明。
分析无人机纵向运动时,需要在无人机飞行过程中选取一个基准点作为基础状态配平点[9],为非线性运动方程的线性化做准备。基准点的选择必须以无人机的对称运动作为基准运动。配平前需要掌握飞机的详细机体参数,再确定配平点的飞行速度和高度,然后通过调整舵机的舵偏转使力和力矩平衡,使之消除横向运动对实验结果产生的影响,最后利用软件完成配平处理。本文采用基于Simulink对非线性模型进行配平[10]。
无人机状态方程在配平点处配平后得到的是非线性方程,将非线性方程基于小扰动原理进行线性化处理,得到无人机线性化小扰动运动方程组的线性时不变系统的形式为[11]
(5)
其中,x 是状态向量,u 是输入向量。
已知样机的部分试验参数如表1所示。
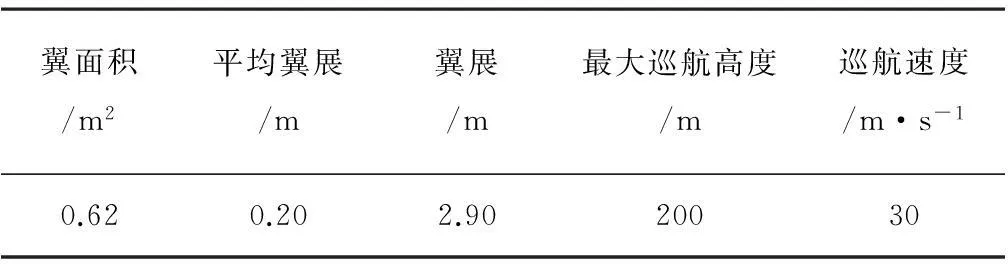
表1 无人机主要参数
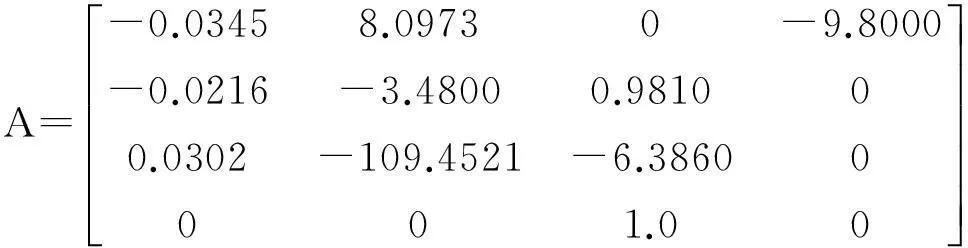
选取平衡点进行配平和线性化处理之后,得到无人机的纵向运动的线性状态空间表达式为

(6)
其中,x=[ΔV,Δα,Δθ,Δq]T,u=Δδe。表达式矩阵系数分别为
本章建立了无人机运动方程,并结合无人机参数在配平点处进行配平及线性化处理,得到了无人机空间状态方程和矩阵系数,为下面农用无人机的纵向控制规律的设计和仿真实验打下了基础。
2农用无人机纵向姿态控制系统设计
2.1 农用无人机纵向姿态控制方法
PID控制是控制系统中经常采用的控制算法,具有单独的控制规律的特点[12]。PID控制器的框图如图1所示。
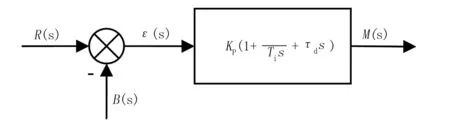
图1 PID控制器框图
由图1可知PID控制系统的传递函数为
(7)
由式(7)可知:比例积分微分控制器的积分环节提高了系统的稳态性能[13];其相位裕度的增加减少了系统的调节时间,快速性得到了增强[14]。
2.2 纵向控制系统设计
农用无人机的纵向控制系统包括两个闭环回路:俯仰角控制回路和高度保持回路。一般飞行环境下,在改变俯仰角使飞机飞行姿态发生变化时,飞机重心才可能发生变化。所以,本文设计的纵向控制系统中,
以无人机的俯仰角的变化为主要被控对象。在飞行过程中,高度的变化也是纵向运动的变化量。本文所设计的高度控制回路通过俯仰角控制高度的方法进行设计。
2.2.1俯仰角控制回路
本文所设计的无人机俯仰角控制回路如图2所示。当无人机接受姿态变化信号开始改变飞行姿态时,是无人机纵向运动的初始阶段,此阶段具有时间短暂、短周期运动模态占主导地位、空速和俯仰角增量变化不大的特点,在分析时认为空速和俯仰角的变化为0。则式(7)可以由四自由度方程简化为二自由度方程,其系数矩阵为


由上述短周期二自由度空间状态方程转化为传递函数定义为[15]G2(s)=(SI-A)-1B。通过计算,得到以升降舵偏转到俯仰角速率的传递函数为
(8)
(9)
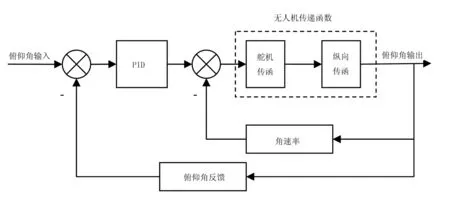
图2 俯仰角控制回路
根据式(9),应用MatLab软件作出无人机传递函数根轨迹曲线,如图3所示。俯仰角内回路闭环系统根轨迹增益值Kq随着曲线的变化而改变:当Kq=0.431时,阻尼比为0.382,此时系统阻尼比较大;在此增益点前后,阻尼比逐渐减小,所以确定内回路闭环增益值为0.431。
在得到内回路的闭环传递函数后,作出向前通道的传递函数根轨迹图,如图4所示。确定外回路增益值Kθ=0.845时,得到俯仰角闭环系统的整体传递函数为
G(θ)=(413.485s+1351.913)/(s4+19.866s3+
317.6367s2+2228.0268s+1142.3665)
(10)
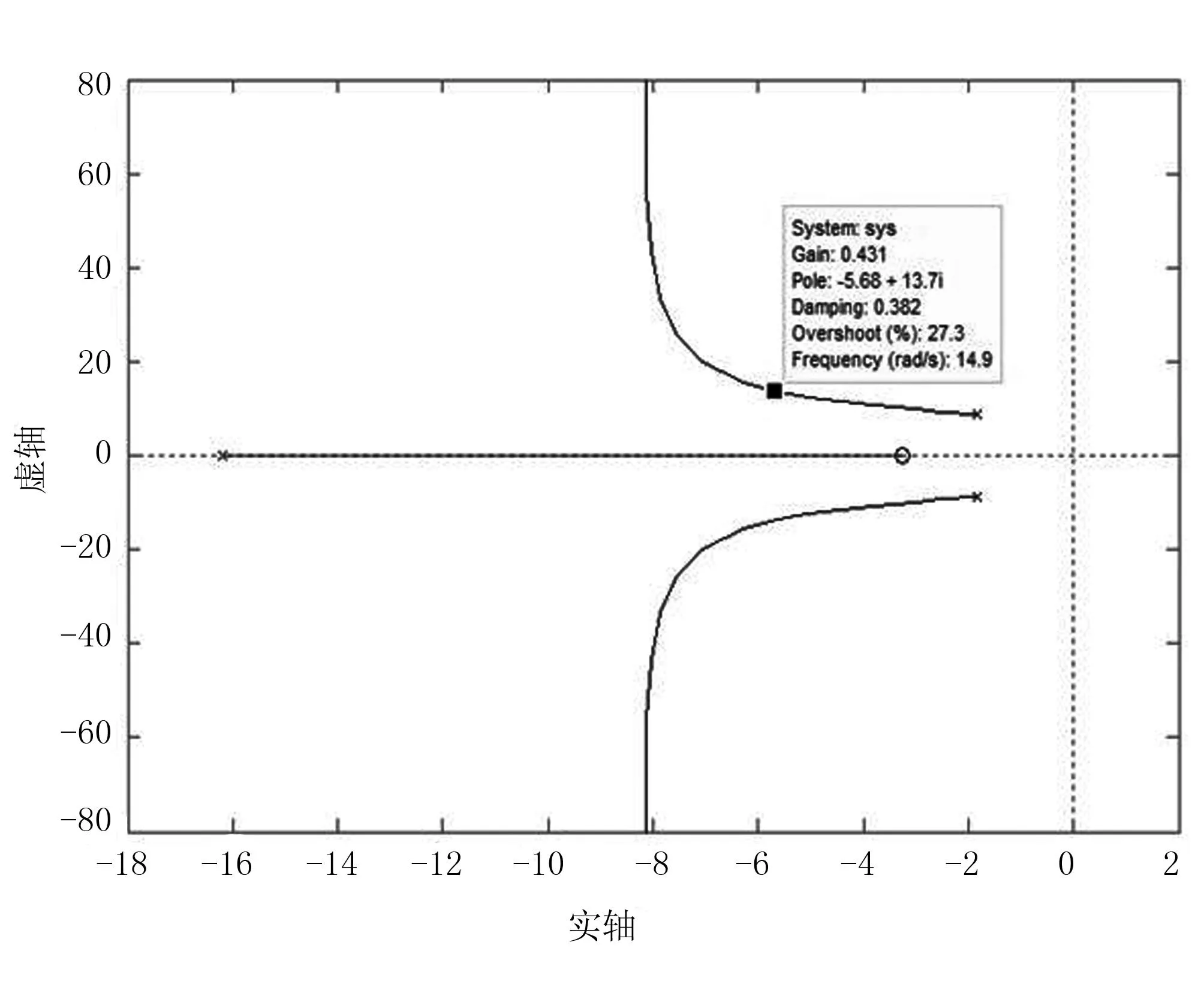
图3 俯仰角内回路根轨迹

图4 俯仰角外回路根轨迹
2.2.2高度控制回路
改变飞行高度是通过改变发动机推力和改变升降舵偏转两种方法来实现,但改变推力使高度改变的方法响应时间慢[16],所以本文采用以俯仰角控制回路作为内回路,以高度变化速率和高度变化为反馈进行设计,如图5所示。通过式(9)得到高度控制系统内回路的根轨迹图,如图6所示。通过分析可知,确定高度控制系统内回路的增益值为1.23。
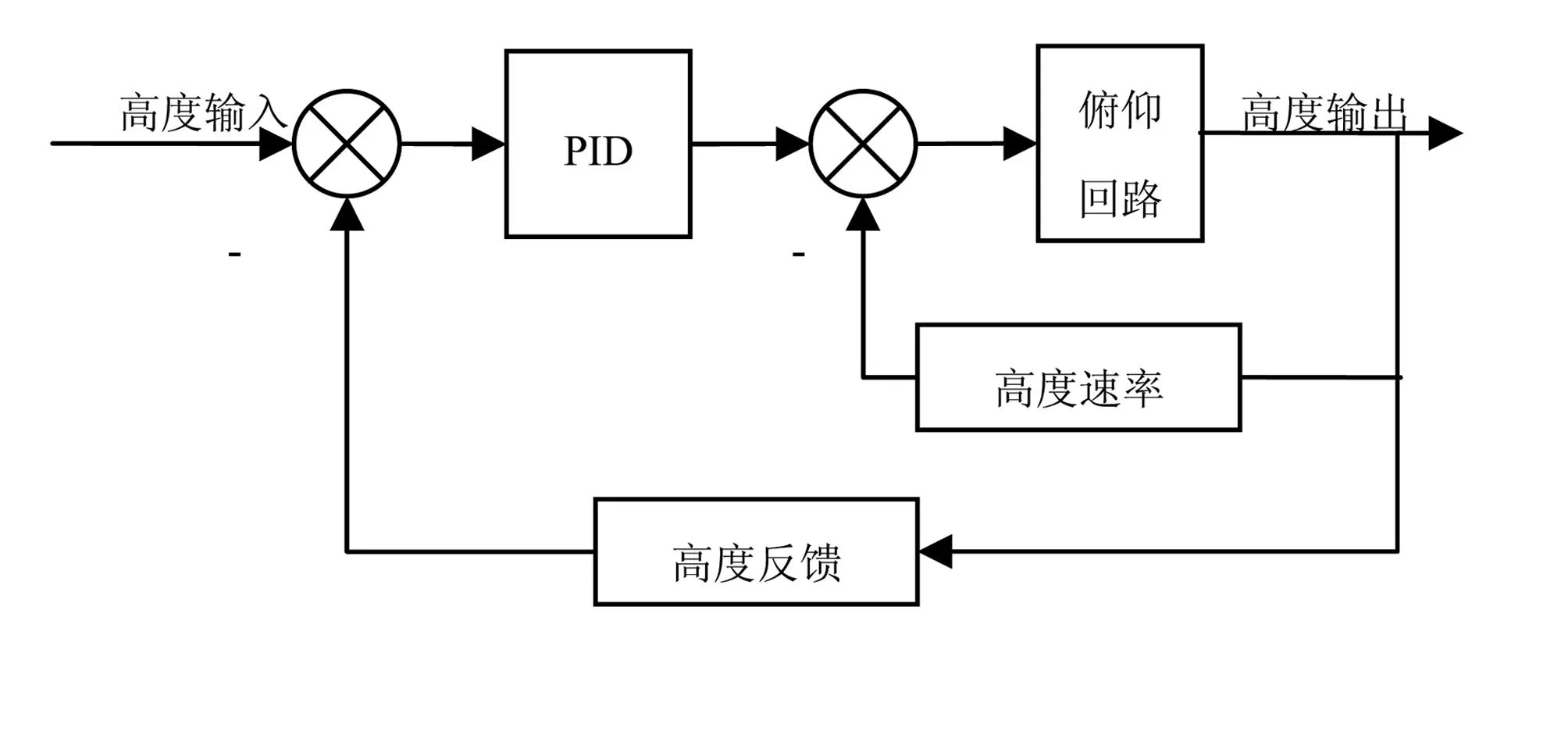
图5 高度控制回路
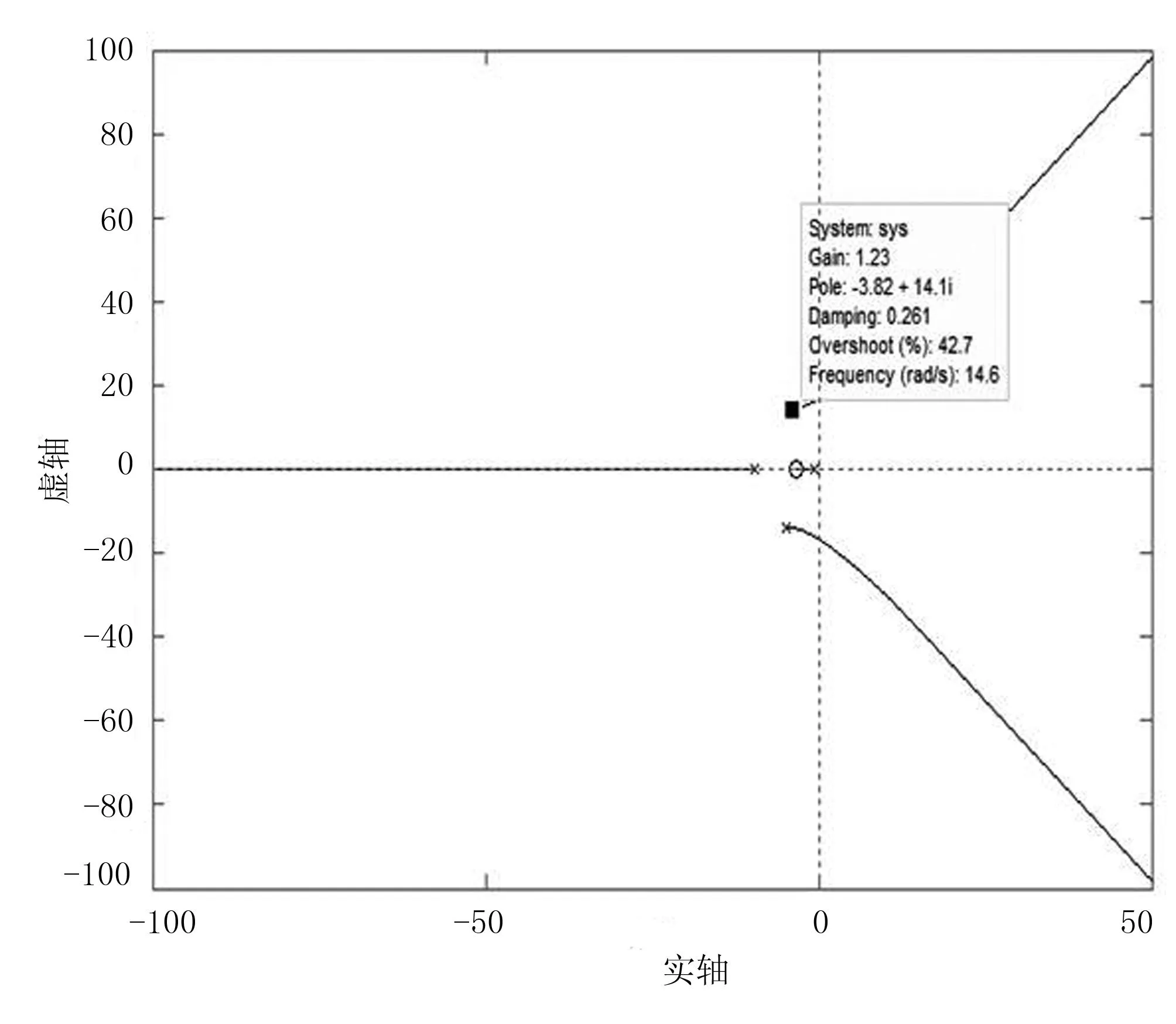
图6 高度控制内回路根轨迹
3仿真实验
在PID控制中,PI控制律和PID控制律在工程中常被采用,且两种控制律都有提高系统稳定性的特点。利用两种控制律进行仿真时,根据仿真波形比较性能差别,应用MatLab软件建立俯仰角控制回路和高度控制回路仿真模型,如图7、图8所示。由上一章节确定的各回路增益值和通过整定参数得到的两回路在两种控制率下的阶跃响应波形如图9和图10所示。其中,实线波形为PID控制,虚线为PI控制。
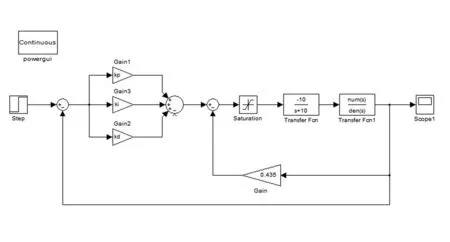
图7 俯仰角控制回路仿真模型
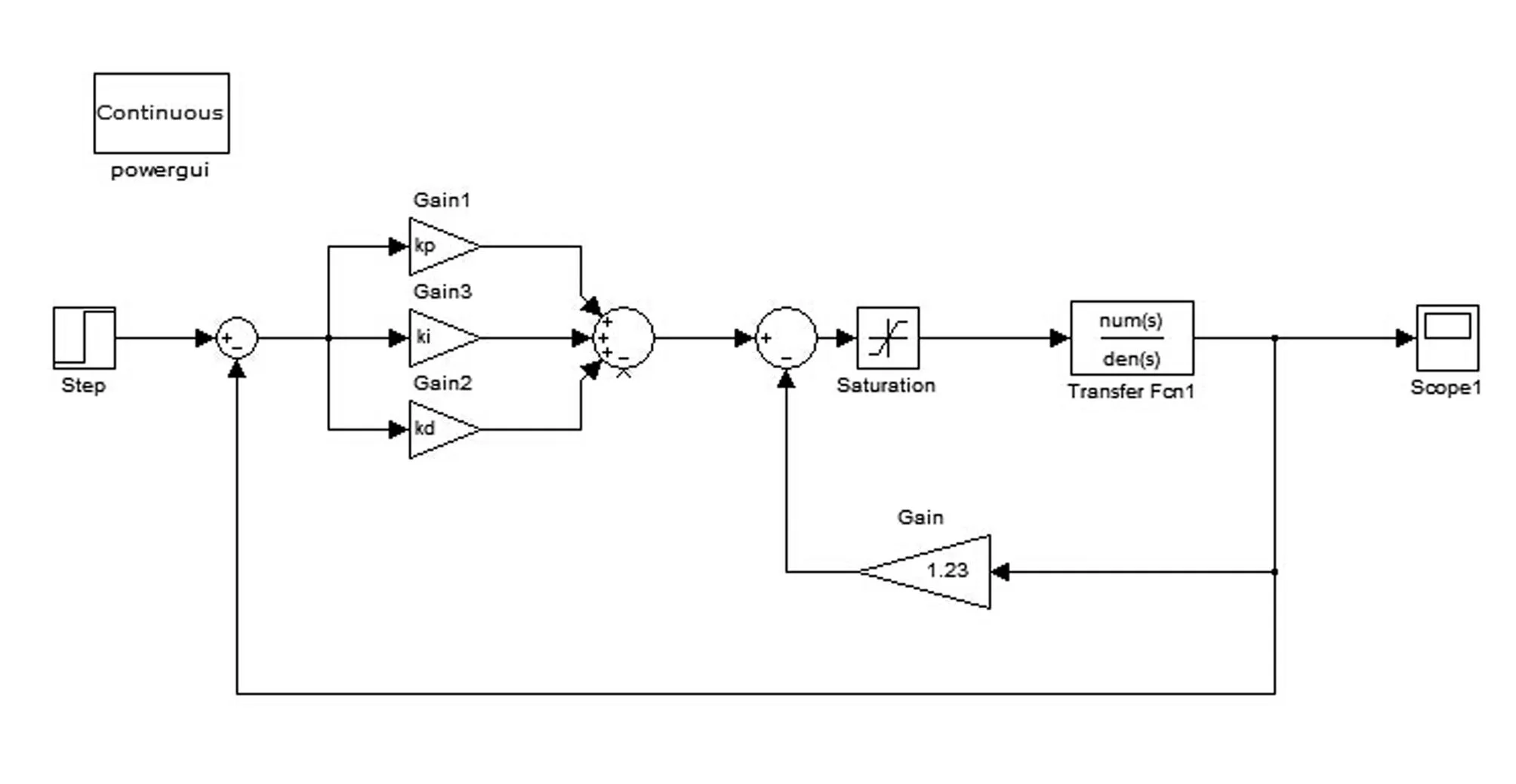
图8 高度控制回路仿真模型
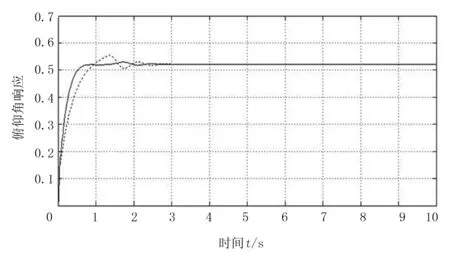
图9 俯仰角控制阶跃响应

图10 高度控制阶跃响应
通过分析俯仰角控制回路和高度控制回路在两种控制律控制下的阶跃响应曲线,得到系统的性参数,如表2所示。比较系统性能参数可知:采用PI和PID控制律控制两回路时,系统的稳态误差均低于允许误差5%,但稳态误差相同;采用PI控制律控制时,系统超调量、调节时间和峰值时间均大于PID控制。综合以上分析,采用PID控制律控制系统具有相应时间快、性能稳定、阻尼性好的优点,虽然具有一定的稳态误差,但低于系统允许误差,可以稳定地控制无人机的飞行姿态。

表2 系统性能参数
4结论
首先分析了农用无人机的非线性纵向运动方程,并以实际样机参数建立了在平衡点上的纵向线性化模型,然后应用经典PID控制理论设计了纵向运动的姿态控制系统。在仿真实验中所得到的数据均表明:利用经典PID控制理论中的PID控制器控制农用无人机的飞行姿态,具有操作简便、性能稳定、满足无人机作用于农业领域的技术要求的特点。相信在未来农用无人机的发展中,会有更加高效的控制思想运用于无人机的各部分控制中,使农用无人机拥有更加广泛的实用领域和市场前景。
参考文献:
[1]陈天华,卢思翰.基于DSP的小型农用无人机导航控制系统设计[J].农业工程学报,2012,28(21):164.
[2]梅劲松,屈蔷,袁佳斌.基于特征模型的某型无人机智能PID控制器[J].南京航空航天大学学报,2006,38(4):483-486.
[3]唐胜景,宋祥,郭杰,等.基于遗传算法的无人机模糊积分控制器设计[J].北京理工大学学报,2013,33(12):1274-1278.
[4]秦世引,陈峰,张永飞.小型无人机纵向姿态模糊自适应PID控制与仿真[J].智能系统学报,2008,3(2):121-122.
[5]胡占双.无人机飞行姿态监测及控制[D].沈阳:沈阳航空航天大学,2012:1-25.
[6]吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学版社,2013:8-10.
[7]李玮.无人机PID控制及智能PID控制技术的研究[D].南京:南京理工大学,2004:1-10.
[8]刘银春.小型无人机控制规律设计及仿真[D].长沙:中南大学,2008:1-21.
[9]Chenggong Huang,Qiongling Shao,Pengfei Jin,et al.Pitch Attitude Controller Design and Simulation for a Small Unmanned Aerial Vehicle [J].2009 International Conference on Intelligent Human-Machine Systems and Cybernetics,2009,2:58-60.
[10]李海泉.小型无人机飞行力学建模及虚拟训练平台的建立[D].南京:南京航空航天大学,2011:7-17.
[11]荣辉,李东,殷堂春.基于Matlab无人机数学模型仿真分析与研究[J].科学技术与工程,2008,8(6):1510-1512.
[12]张冬妍,周修理.自动控制原理[M].北京:机械工业出版社,2011:225-227.
[13]赵笑笑. 基于模糊理论和常规PID控制的模糊PID控制方法的研究[J].山东电力技术,2009(6):54-63.
[14]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:北京科学出版社,2010:8-14.
[15]刘豹,唐万生.现代控制理论[M].北京:机械工业出版社,2007:15-31.
[16]胡庆.基于STM32单片机的无人机飞行系统设计[D].南京:南京航空航天大学,2012:33-36.
Abstract ID:1003-188X(2016)10-0006-EA
Longitudinal Attitude control System Design and Simulation of Agricultural Unmanned Aerial Vehicle
Liu Chao, Zhang Changli, Wang Shuwen, Wang Runtao, Zhang Lingyi,Lv Tao, Luan Jiling, Zhou Yanan
(College of Electric and Information, Northeast Agricultural University, Harbin 150030, China)
Abstract:This Longitudinal attitude control system is designed on the basis of Classic PID control method. It’s also specific to the character of how Agricultural unmanned aerial vehicle operates and its application field.The system firstly uses Matlab to build a Longitudinal motion mathematical model at the trim point of the vehicle,which can analyze the Longitudinal motion of itself. Secondly, the system applies the Classic PID theory to the design of the Pitch and Height attitude control loop of the vehicle. The result shows that the attitude control system effects well during flight and can meet the technical requirement of Agricultural unmanned aerial vehicle.
Key words:agricultural unmanned aerial vehicle; longitudinal attitude; PID control; simulation
中图分类号:S251
文献标识码:A
文章编号:1003-188X(2016)10-0006-05
作者简介:刘超(1990-),男,哈尔滨人,硕士研究生,(E-mail)1743780584@qq.com。通讯作者:张长利(1957-),男,哈尔滨人,教授,硕士生导师,(E-mail)zhangcl@neau.edu.cn。
基金项目:国家“863计划”项目(AA2013102303);黑龙江省博士后科研启动基金项目(LBH-Q13022);东北农业大学科技创新基金项目(yjscx-14003);黑龙江省自然科学基金面上项目(C2015006)
收稿日期:2015-09-10
