3ZT-3型中耕追肥机设计与试验
2016-03-23李楠楠刘宏俊赵淑红谭贺文张先民杨悦乾
李楠楠,刘宏俊,赵淑红,谭贺文,张先民,杨悦乾
(1.华北光电技术研究所,北京 100015;2.东北农业大学 工程学院,哈尔滨 150030)
3ZT-3型中耕追肥机设计与试验
李楠楠1,刘宏俊2,赵淑红2,谭贺文2,张先民2,杨悦乾2
(1.华北光电技术研究所,北京100015;2.东北农业大学 工程学院,哈尔滨150030)
摘要:针对中耕追肥机动力功耗大、除草效果不好和肥料利用率不高等问题,结合现有的中耕机械技术,研制出3ZT-3型中耕追肥机。该机通过施肥铲和前后松土铲,可以分别完成垄帮儿施肥和垄沟分层松土除草。为此,主要论述了追肥机整体结构、工作原理和主要工作部件的设计。田间试验结果表明:总排量稳定性变异系数为5.4%,各行排肥量一致性最大变异系数为6%,行间杂草除净率为95%,其它各项技术性能指标均符合设计要求,能满足实际工作需求。
关键词:中耕;追肥;施肥铲;松土;除草
0引言
由于农作物在生长期对肥料和养分的需求大,需要进行中耕追肥作业。中耕通过疏松土壤,有效改善土壤结构,改善土壤的透气率和透水性提高土壤蓄水抗旱的能力,消灭杂草,有效地解决在保护性耕作下土壤变硬和容重增大等问题[1-4]。中耕追肥是保证稳产、高产不可缺少的重要措施[5]。
广泛应用于保护性耕作区生产作业的中耕追肥机属于中耕机械[6]。虽然传统的机具能满足工作要求[7],但也存在一些问题[8]。这些机具往往是根据某一单一作物的种植,并且结合当地农作物要求设计制造,通用性差[9],不能同时满足不同作物追肥的需求。同时,传统的中耕追肥机采用松土作业时,功耗较大、工作阻力和动土量大,容易产生大的土块儿压苗。在追肥作业时,施肥不均匀,肥料覆盖率低,造成肥料的浪费及作物吸收不足。
为此,针对中耕追肥作物对肥料吸收不足、深松功耗大等问题,设计了3ZT-3型中耕追肥机,能分别完成垄帮儿施肥和垄沟分层松土除草等中耕作业。
1整机结构及工作原理
1.1 整机结构
3ZT-3型中耕追肥机整机主要由机架、仿形机构、肥箱、单体梁、松土除草部件及施肥铲、传动地轮等组成,如图1所示。该机具主要参数如表1所示。
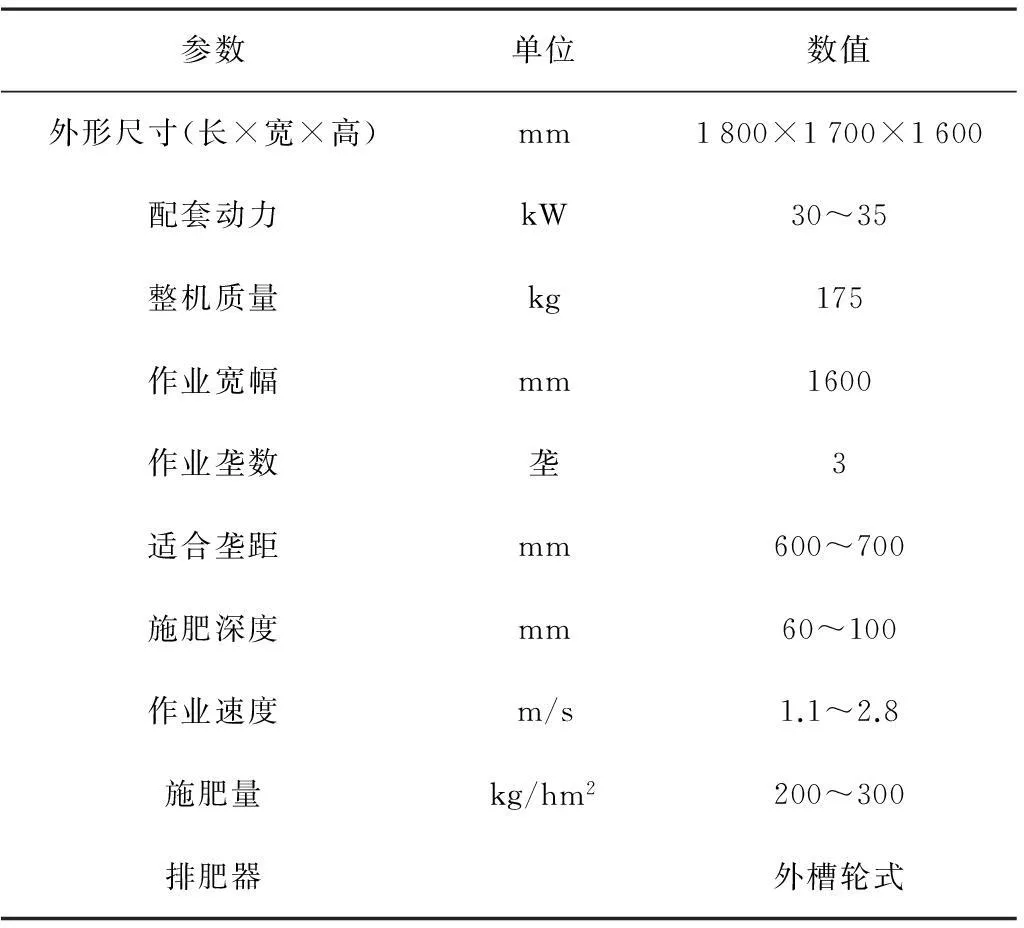
表1 3ZT-3型中耕追肥机主要参数
1.2 工作原理
3ZT-3型中耕追肥机采用三行同时作业的耕作方式,可以分别完成中耕追肥和松土除草等作业。在进行苗期垄沟松土时,仿形机构通过限深轮控制每一个工作单体的作业深度,前后松土铲在垄沟内,进行分层松土和除草作业,可以避免土壤产生垡块而导致压苗。
在追肥作业时,仿形机构通过限深轮控制追肥机工作部件的入土深度,限深轮通过链传动带动外槽轮式排肥器排肥,肥料被排入施肥管中,顺着施肥管进入施肥铲开出的肥沟内。肥沟位于垄帮儿上,距苗行100mm以上。后面跟着的培土铲对垄台培土,掩埋肥料。这种追肥作业可增加土壤对肥料的覆盖率,减少挥发损失,增加肥效,进而提高作物产量。

1.机架 2.仿形机构 3.肥箱 4.单体梁 5.后置松土除草铲 6.施肥铲 7.前置松土除草铲 8.传动地轮
2关键部件的设计
2.1 追肥机单体梁结构设计
单体梁是安装各个工作部件的载体,根据不同的作业要求各工作部件的安装位置不同,所以单体梁的结构非常重要。根据苗期垄沟分层松土,后期垄帮儿追肥封垄等作业要求,设计单体梁结构如图2所示。单体梁纵向从前往后依次安装限深轮、前置松土铲及后置松土铲。单体梁的侧向有两个辅助梁,用来安装施肥开沟器。为避免作业时拖堆,两个辅助梁前后错开300mm以上,为适应600~700mm垄距,取每个辅助梁的长度为250mm。

1.后置松土铲位置 2.施肥铲位置 3.前置松土铲位置
在苗期垄沟松土时,采用单体梁前后放置松土除草铲,通过控制前置松土铲入土深度100mm左右和后置松土铲入土深度150mm左右,实现分层松土除草,减少土壤垡块,避免伤害秧苗;同时还把部分土壤推向垄台,起到一定的修垄作用。
在追肥封垄作业时,卸下前置松土铲,后置松土铲安装分土板,施肥铲安装在单体梁的辅助梁上,根据实际需要调整其具体位置;限深轮同时能起到传动作用,并通过链传动带动排肥器排肥。此时,单体梁上由前向后依次安装有限深传动轮、左右施肥铲及培土铲。
2.2 施肥铲
施肥铲[10]主要由铲尖和铲柄组成,结构如图3所示。其主要的参数有入土角α、入土隙角β和曲率半径R。这种开沟部分采用锐角部分,能保证施肥铲的入土能力,圆弧部分能降低土壤对铲子的工作阻力。
1)施肥铲入土角α。在施肥铲破土时,其工作面与沟底面的夹角α为入土角。当α较大时,土壤扰动量增大,干湿土混合加剧,不利于肥料的溶解。国内外学者对入土角进行了大量深入研究发现,当入土角α在0°~20°时,施肥铲所受的土壤工作阻力小;当入土角α>20°时工作阻力随着α的增加而增加。在垄间中耕时,控制施肥铲对土壤扰动量,因此入土角α不宜过大,以免土壤干湿混合严重。考虑施肥铲尖的强度、施肥铲的宽度较小等实际情况,设计入土角α为39°。由于其宽度较小,所以具有较强的入土能力。施肥铲尖的形状影响到施肥铲工作质量的好坏,本设计所采用的铲尖是圆弧状,特点是铲尖入土后,土壤有小距离的上升,然后进入平缓期,使土壤的上升缓慢,尽量减小土壤的扰动量,之后靠施肥铲柄挤开土壤,形成肥沟。施肥铲工作过后垄沟里有松散土壤,使其后面的培土铲能够把肥料覆盖和往垄台上培土,达到封垄作业效果。
2)入土隙角β。施肥铲与土壤表面之间的夹角β为入土隙角。入土隙角β可以提高施肥铲的入土能力。当入土隙角β过小时,施肥铲的入土能力不好,加速铲尖的磨损速度;当入土隙角β过大时,入土角要相应增大,容易导致扰动的土壤加速回落沟底,将影响开沟深度,且易造成化肥覆盖深度过浅。根据相关农业人员进行的深入研究发现,入土隙角β应在5°~10°之间。根据中耕追肥要求,设计入土隙角β= 8°。
3)曲率半径R。施肥铲铲尖为圆弧式,曲率半径R与入土角α呈一定的线性关系。若曲率半径R过大会导致铲尖的整体结构过大,而当曲率半径R过小时,会导致入土角α过小,进而导致强度不够。综合考虑,取曲率半径R=110mm。
4)铲柄结构。施肥铲铲柄的作用是把铲尖和单体梁连接起来,要求具有一定的强度。同时,由于本机器的配套动力较小,所以要求尽可能减轻质量,综合考虑,选择30mm×50mm的矩形空心管来做施肥铲铲柄,施肥铲柄长度为500mm。矩形空心管在满足强度要求时重量较轻,同时可以利用其空心部分作为输肥管,即简化了结构,又可以防止输肥管在作业时发生输肥管与开沟器脱离现象,保证施肥位置的准确。

1.铲柄 2.铲尖
2.3 松土除草铲
松土作业可以降低地表容重,获得良好的土壤结构,有利于作物生长。3ZT-3型中耕追肥机主要是玉米的中耕管理和追肥封垄作业,采用的松土除草铲可以实现分层松土作业。
松土除草铲是由铲尖、铲柄组成,如图4所示。松土除草铲是该中耕追肥机的主要部件之一。松土除草铲主要是松动土壤,提高土壤内部的疏松度,从而提高土壤的透气性,同时提高土壤的蓄水保墒能力,利于作物生长[11-12]。前松土除草铲松土深度100mm,由于表层土壤比较疏松,100mm深度时土壤扰动量小,土壤不易结块;后松土铲比前松土除草铲深50mm,由于100~150mm土壤相对板结作业阻力较大,耗费的动力较大。由于前松土铲作业时铲尖留下的沟底较尖,在后松土铲作业时土垡在应力作用下沿中间尖部裂开,避免产生大的土块儿而压苗,同时减少了动力消耗。在松土的同时剪断杂草的根系,松土除草铲使部分土壤上升至垄台上,盖住垄台上的部分杂草,起到除草的作用。

1.铲尖 2.铲柄
铲尖固定于铲柄的前端,同时在追肥机作业时铲柄固定于单体梁上,铲柄可以更换不同类型的铲尖。3ZT-3型中耕追肥机采用的是尖头的铲尖,固定于铲柄上,当铲尖磨损或损坏时,可以方便更换。考虑到3ZT-3型中耕追肥机在中耕作业时土壤硬度大,土壤中石砾少,采用刚性铲柄。如果在土壤粘度大、湿度大、杂草多的情况下,可以考虑更换弹性铲柄。刚性铲柄一般用扁钢制造,下部弯成一定曲度,其前端圆滑。
本机采用目前生产使用较多的刚性铲炳。
3田间试验与结果分析
3.1 试验条件
田间性能试验在黑龙江省哈尔滨市香坊区东北农业大学实验基地进行。
苗期垄沟分层松土试验为2015年6月10日,试验田为玉米垄作田。共平均垄距为650mm,土壤含水率为16.92%(0~100mm);垄台土壤坚实度为0.96MPa(0~150mm);垄沟土壤坚实度为1.43MPa(0~150mm);作业速度平均值为5 km/h。试验拖拉机为约翰迪尔324轮式拖拉机。作业面积2hm2,前置松土铲作业深度100mm,后置松土铲比前置松土铲深50mm,没有土垡压苗情况。
追肥封垄试验是在同一地块进行,试验日期为2015年6月20日,试验用化肥为尿素的颗粒肥料。施肥开沟器入土深度70mm,两开沟器横向间距400mm,在试验过程中没有拖堆现象,机器的通过性很好。
3.2 试验方法
根据《中耕追肥机》[13]中试验方法要求,进行追肥机的相关性能试验。追肥机性能测试结果如表2所示。
3.2.1除草率测定
随机选择6个测试区(长2m和宽1.5m)测定作业前后行间区内杂草的株数。具体的除草率公式为

式中c—除草率(%);
Qz—耕前草株数;
Hz—耕后草株数。
3.2.2施肥量准确测定
施肥前后需将肥箱内化肥称重。根据施肥公顷数计算实际公顷施肥量,则有
式中Zf—施肥量准确度;
fs—实际施肥量(kg/hm2);
fy—预计施肥量(考虑滑移率)(kg/hm2)。
3.3 试验结果分析
追肥机性能测试结果参如表2所示。

表2 3ZT-3型中耕追肥机性能测试结果
1)由表2可知:3ZT-3型中耕追肥机的碎土率能达到89%,小土块占大部分,大土块很少,符合中耕作业对土壤的农艺要求,能满足中耕作业对碎土的要求;前后布置的松土铲,对减少大的土垡作用明显,追肥作业时施肥铲又对垄帮进行松土,土壤细碎,抑制了大土块儿的产生。
2)各行耕深为肥沟沟底到土壤表面的距离。由表2可知:各行更深变异系数达到试验要求,耕深的稳定性好,施肥作业时,施肥深度变化不明显,符合农艺要求。
3)由表2可知:3ZT-3型中耕追肥机的行间除草率能达到95%,除草效果好。
4)通过对排肥量数据进行分析发现:总排肥量稳定性变异系数、各行排肥量一致性最大变异系数和施肥量误差均满足中耕试验指标要求。通过田间试验结果可以看出,3ZT-3型中耕追肥机排肥稳定性好。
4结论
1)为了解决中耕追肥机动力功耗大、除草效果不好及肥料利用率不高等问题,本文设计出3ZT-3型中耕追肥机。
2)3ZT-3型中耕追肥机通过垄帮施肥和前后松土除草铲分层松土除草,降低动力消耗,减少了中耕成本。该机通过施肥铲和前后松土铲,可以分别完成垄帮施肥和垄沟分层松土除草。
3)通过田间性能试验结果表明:3ZT-3型中耕追肥机的技术性能指标均达到农艺生产要求,能满足实际工作需求。
参考文献:
[1]李洪文, 陈君达.保护性耕作条件下深松技术研究[J].农业机械学报, 2000, 31(6): 42-45.
[2]孔德军, 高焕文, 张永康, 等.保护性耕作条件下浅松作业的试验[J].农业机械学报,2006, 37(5): 48-50.
[3]朱瑞祥, 张军昌, 薛少平, 等.保护性耕作条件下的深松技术试验[J].农业工程学报, 2009(6): 145-147.
[4]孔德军, 王世学, 高焕文, 等.1QJ-120 型浅松机的研究设计[J].农机化研究, 2004(2): 126-130.
[5]王吉亮, 王序俭, 曹肆林, 等.中耕追肥机械技术研究现状及发展趋势[J].安徽农业科学, 2013(4): 1814-1816.
[6]芦磊, 李德鑫, 于文昌, 等.中耕追肥起垄机的设计[J].农业科技与装备, 2013(8): 21-22.
[7]何进, 李洪文, 高焕文.中国北方保护性耕作条件下深松效应与经济效益研究[J].农业工程学报, 2006, 22(10): 62-67.
[8]韩豹, 申建英, 李悦梅.3ZCF-7700 型多功能中耕除草机设计与试验[J].农业工程学报, 2011,27(1): 124-129.
[9]吴波, 李问盈, 李洪文, 等.垄台修复中耕追肥机的设计[J].农业工程学报,2008,24(9): 99-102.
[10]李振.中耕追肥机施肥铲的设计与试验研究[D].哈尔滨:东北农业大学, 2014.
[11]甄文斌, 杨丹彤, 黄世醒.带翼深松铲的试验研究[J].农机化研究, 2011,33(8): 119-122.
[12]齐关宇, 刘林, 赵艳忠, 等.深松铲入土深度及铲形对耕作阻力影响[J].农机化研究, 2015,37(11): 161-165.
[13]JBT 7864-2013.《中耕追肥机》[S].
Design and Experiment of the 3ZT-3 Cultivator Fertilizer Machine
Li Nannan1, Liu Hongjun2, Zhao Shuhong2, Tan Hewen2, Zhang Xianmin2, Yang Yueqian2
(1.Science and Technology on Solid-state Laser Laboratory, Beijing 100015, China;2 .College of Engineering, Northeast Agricultural University, Harbin 150030, China)
Abstract:In order to solve the problems of the crops absorbing insufficiently fertilizer, the large power consumption and the low weeding rate, the 3ZT-3 cultivator fertilizer machine was designed. The machine which had the fertilizer shovel and the scarification and weeding shovel was suitable for the cultivator ridging tillage. The machine could complete side deep fertilizing on the ridging platform and stratified scarification and weeding on the ridging furrow by one time. This article mainly discussed the structure of the machine, working principle and the design of the main working parts. The results of the field experiment showed that the total displacement stability coefficient of variation was 5.4%, each row fertilizer consistency maximum coefficient of variation of 6%, inter row weeds in addition to the net rate of 95%, other the technical performance indicators were in line with the design requirements. Experimental results show that this machine can meet the practical needs of the work.
Key words:cultivator; fertilizer shovel; scarification; weeding
中图分类号:S224.2
文献标识码:A
文章编号:1003-188X(2016)11-0181-05
作者简介:李楠楠(1982-),男,北京人,工程师,(E-mail)linannan@sina.com。通讯作者:赵淑红(1969-),女,哈尔滨人,教授,博士生导师,(E-mail)shhzh91@sina.com。
基金项目:“十二五”国家科技支撑计划项目(2014BAD11B01-02)
收稿日期:2015-11-19