基于粗糙集与遗传算法的采摘机器人路径规划
2016-03-23汪小志
蔡 炯,汪小志
(1. 攀枝花学院,四川 攀枝花 617000;2.南昌工学院,南昌 330108;3.武汉理工大学,武汉 430070)
基于粗糙集与遗传算法的采摘机器人路径规划
蔡炯1,汪小志2,3
(1. 攀枝花学院,四川 攀枝花617000;2.南昌工学院,南昌330108;3.武汉理工大学,武汉430070)
摘要:为了提高采集机器人路径规划速度和自主导航的智能化水平,提出了一种基于粗糙集和遗传算法的路径规划方法,从而有效地提高了路径规划的速度和精度。采摘机器人根据实际果实采摘环境,利用图像分割技术,对果实目标进行识别,在二维栅格地图环境下,制定出决策表,并使用粗糙集对决策表进行约简,得到最小决策表,将其作为遗传算法初试种群,进行遗传交叉和复制操作,优化路径规划算法。为了验证采摘机器人算法性能的可靠性,对采摘机器人的性能进行了测试,包括果实图像的识别和机器人路径规划能力。通过测试发现:采摘机器人可有效地分割提取出成熟果实,并可完成多目标任务。对粗糙集和遗传算法的性能进行了测试,结果发现:使用粗糙集可以大大降低所需训练种群的数目,减少平均迭代次数;增加障碍物的复杂程度后,使用粗糙集遗传算法可以明显地提高路径规划的速度,从而提高了机器人采摘作业的效率。
关键词:采摘机器人;路径规划;遗传算法;自主导航;粗糙集;决策表
0引言
采摘机器人代表着农业高新科技发展的前沿,是农业科学研究的重点。机器人视觉系统是智能化自主移动式机器人设计的关键环节,是机器人完成自主路径规划的基础,对其研究具有重要的意义。目前,机器人路经规划的方法有很多。其中,基于遗传算法的路径规划方法,其搜索性能较好,但是规划所需时间长,很难满足机器人在复杂环境下的作业要求,特别是在动态环境下的实时性;虽然该方法也曾有过改进,但是效果都不太理想。针对这一问题,本研究在机器遗传算法路径规划的基础上引入了粗糙集,从而可提高移动机器人的全局路径规划能力,以实现机器人路径规划的动态性和实时性。
1采摘机器人路径规划算法总体设计
采摘机器人的路径规划需要根据果实目标图像,先制定出路径决策表;但路径决策表的数据量非常庞大,需要通过一定的算法对表的条件属性和决策属性进行简化,通过消除冗余数据,大幅度地简化决策表。路径规划算法的总体设计框架如图1所示。
图1中,首先利用果实识别图像产生决策表,然后对决策表进行初步简化,简化训练集和属性;使用粗糙集对决策表进行简化,然后将简化后的决策表作为样本数据,作为遗传算法的训练集。遗传算法和粗糙集算法之间的信息交换来调整每个训练集的决策规则,进一步对算法进行优化,直到训练集样本全部正确划分。
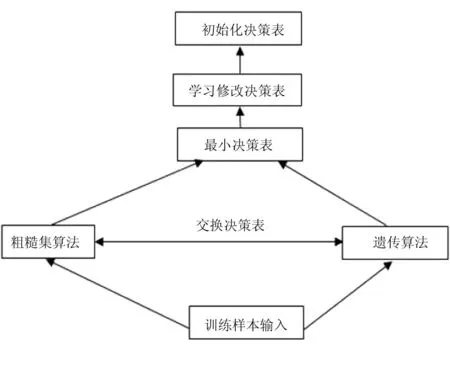
图1 路径规划算法总体设计框架
2路径规划粗糙集和遗传算法优化
机器人路径规划基于现实环境目标图像的处理和追踪。在采摘机器人作业环境中,机器人和采摘果实目标方位都是未知的,为了让机器人能够清晰地辨认果实采摘目标,使机器人的视野更加开阔,采用彩色摄像头装置。该摄像装置具有快速对焦功能,且俯仰性能较好,可对大范围内的果实目标进行采集,实时性较好。摄像头安装在采摘机器人执行末端,如图2所示。

图2 采摘机器人视觉系统示意图
果实目标图像从摄像头采集后不能直接被系统直接使用,需要对图像进行数字化处理;数字转换利用采集卡完成,可以采集果实图像信息,输出系统可以识别的数字数据,保存在计算机中,成为可编辑处理的图像信息数据,如图3所示。
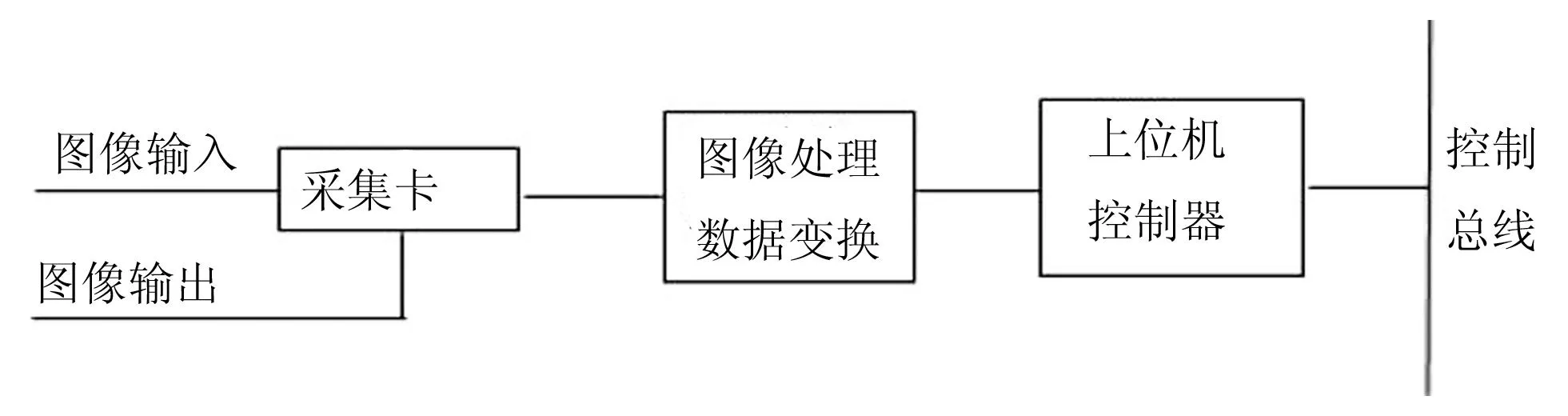
图3 采集卡工作原理图
利用采集卡可以完成图像的实时采集,通过控制总线实现采集卡和PC机的实时信息传输。采集卡的图像输出为RGB颜色模型,在对图像进行处理前需要进行颜色模型转换,将其转换为HVS颜色空间模型,则有
(1)
(2)

r=v(1-s)
(3)

(4)
采摘机器人的路径优化主要包括躲避障碍物和搜索最佳路径。为实现此目标,利用图像分割处理技术,结合粗糙集和遗传算法种群训练,对路径算法展开研究。为此,建立机器人路径规划的初始决策表,其栅格化模型表如图4所示。
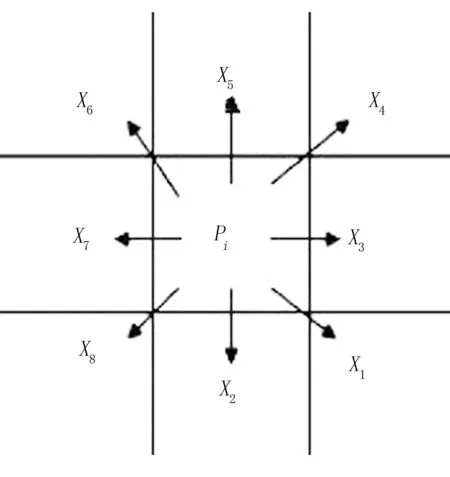
图4 采摘机器人移动路径栅格化表
当移动机器人处于Pi点时,下一步移动会有8个方向,将这个8个方向进行量化可得
C={X1,X2,X3,X4,X5,X6,X7,X8}
(5)
根据方向量化,可以建立初始决策表。假设1表示栅格障碍物,2表示自由栅格,Y表示决策属性,则初始决策表如表1所示。
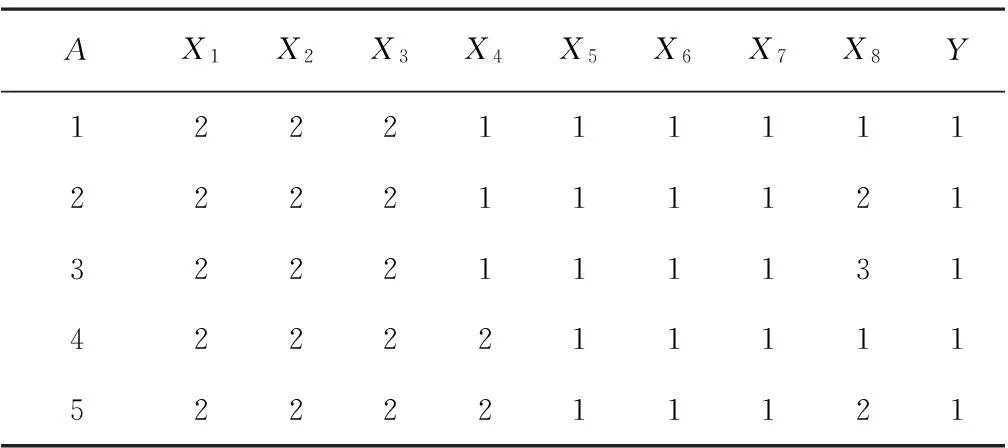
表1 初始决策表

续表1
利用粗糙集算法,可以对相同的决策类进行去除处理,从而去掉决策的冗余数据。通过粗糙集算法优化,得到了最小决策表如表2所示。

表2 粗糙集算法优化决策表
由表2可以看出:通过粗糙集训练后,初始决策种群的规模明显减小,保证了在保留可行解的基础上,提高了遗传算法的计算效率。在进行路径优化过程中,如果仅仅应用路径的长度作为标准,达不到最优化效果,因此引入适应度函数,则有
(6)
其中,n为栅格的数目;D为相邻序号之间的直线距离和。在进行遗传算法操作时,需要引入修正因子。图5表示机器人路径规划的总体框架结构图。根据实际果实采摘环境,利用图像分割技术,机器人对果实目标进行识别,制定出决策表,并利用粗糙集算法对决策表进行简化,然后利用遗传算法选择最优路径。
3采摘机器人性能测试
为了验证本次研究设计的果实自动识别和自主规划路径机器人的可靠性,对机器人的性能进行了测试,包括图像处理性能和路径识别性能。同时,结合粗糙集和遗传算法对机器人进行编程控制,其测试场景如图6所示。
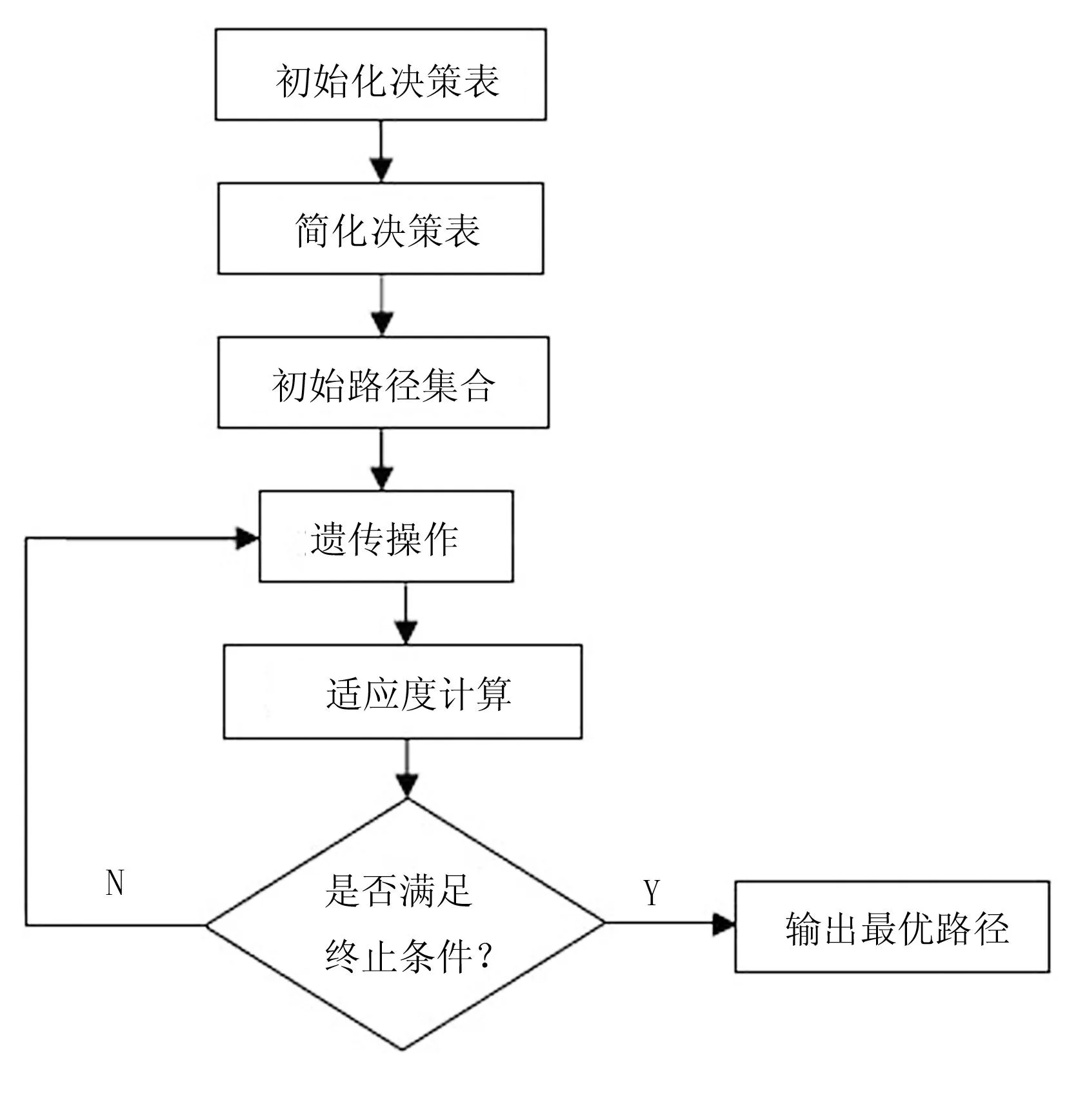
图5 机器人路径规划算法总体框架
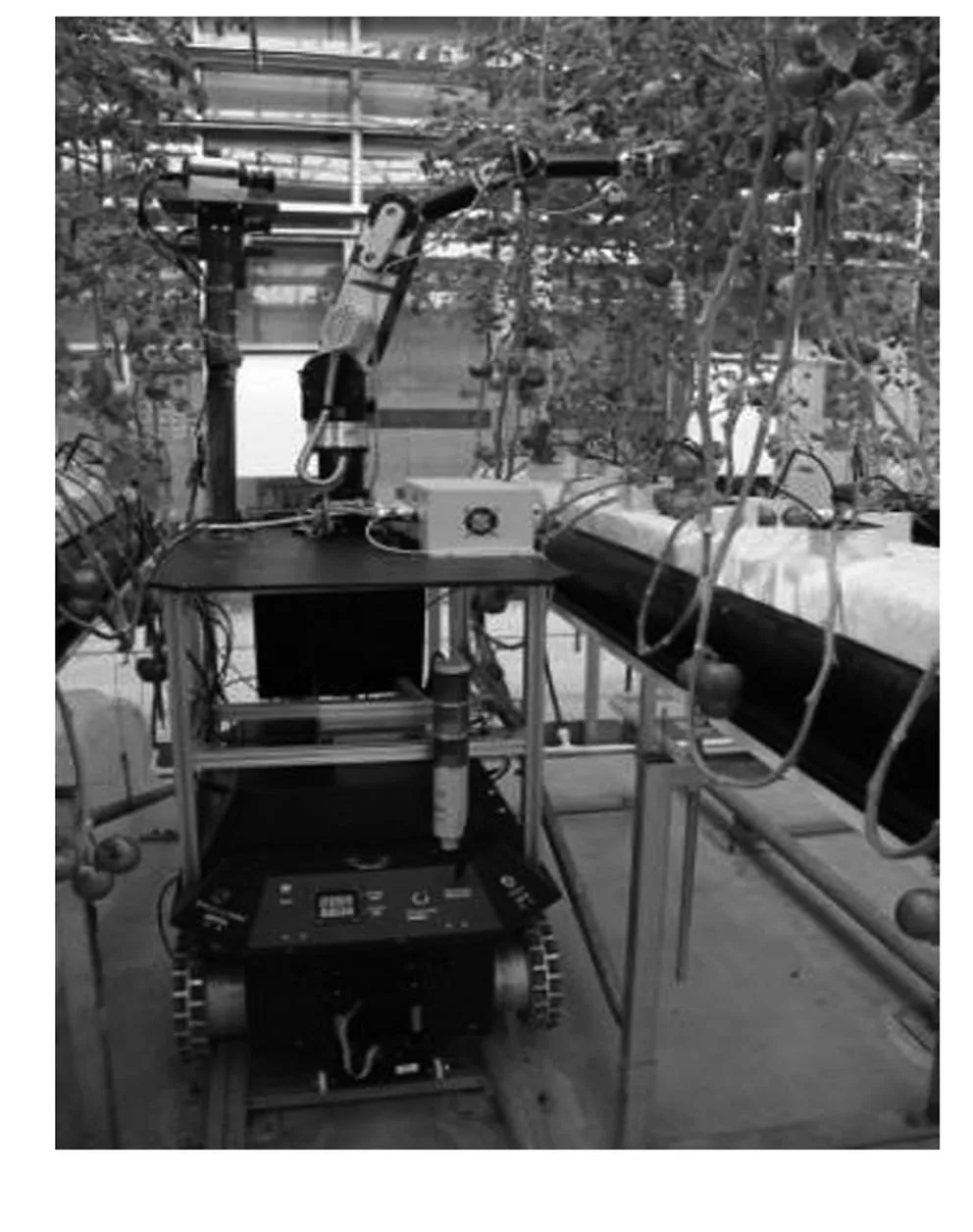
图6 果实采摘测试场景照片
首先,对其图像分割处理性能进行了测试,选择了背景较复杂的果实图像作为图像分割对象,通过测试得到了如图7所示的测试结果。
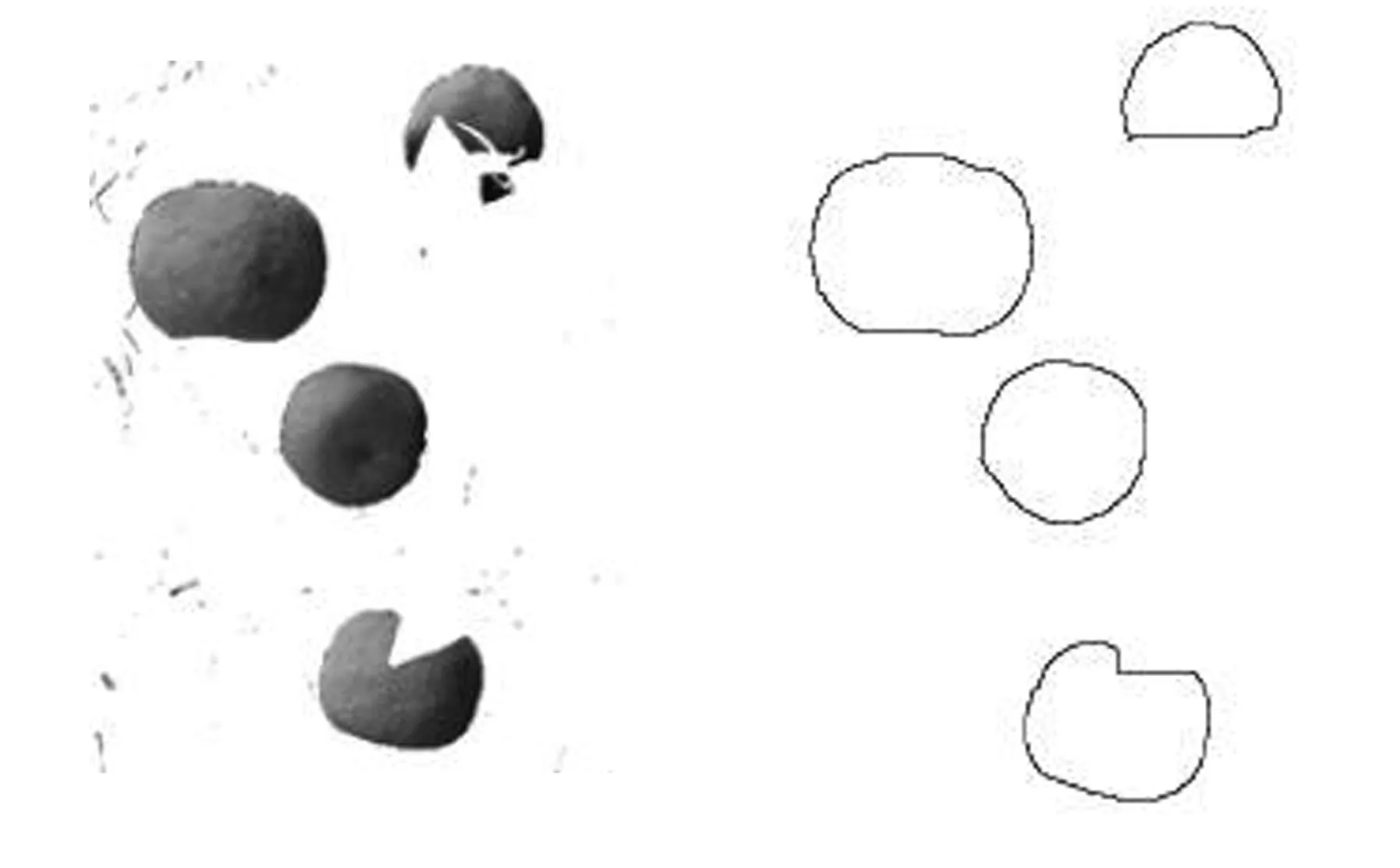
图7 枝叶遮挡后橘子果实图像处理结果
为了验证机器人视觉系统的可靠性,选取了有枝叶遮挡的果实图像作为图像分割对象,采用图像处理技术成果的分割出了果实图像,如图8所示。

图8 果实重叠橘子果实图像处理结果
由图8可以看出:对于重叠果实类的图像,机器人也能成功地分割出果实目标,从而验证了其图像处理算法的可靠性。
为进一步研究机器人的性能,对其多目标搜索进行了测试,测试结果如图9所示。从图9可以看出多目标跟踪的时间分配情况。其中,各个搜索过程在试验中可以完成相互切换功能,从而验证了基于粗糙集理论的决策算法的有效性。
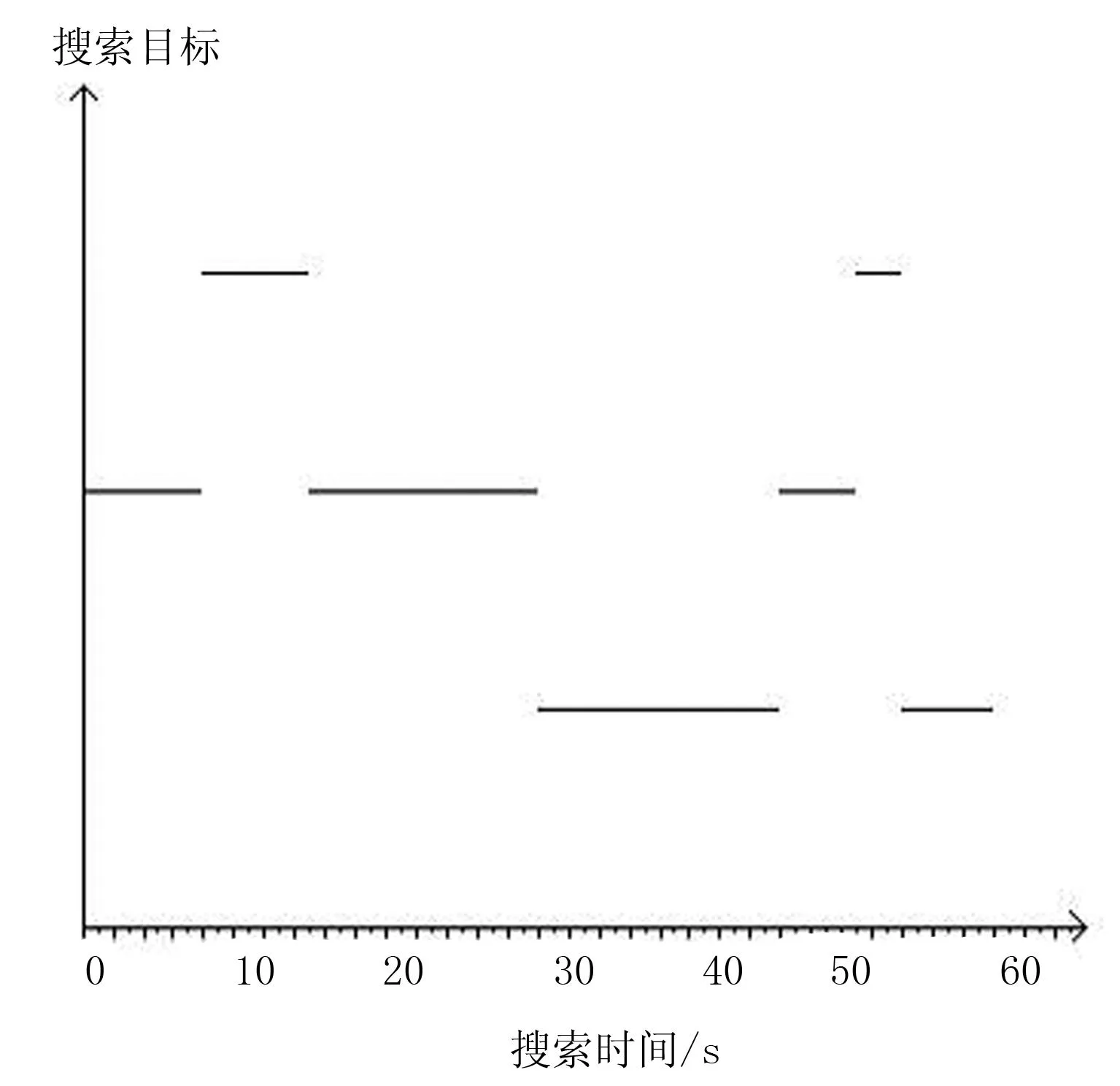
图9 多目标搜索测试结果
图10为机器人智能采摘路径的规划结果。机器人由右侧起点开始运动,移动到左侧果实目标区域,执行采摘动作。
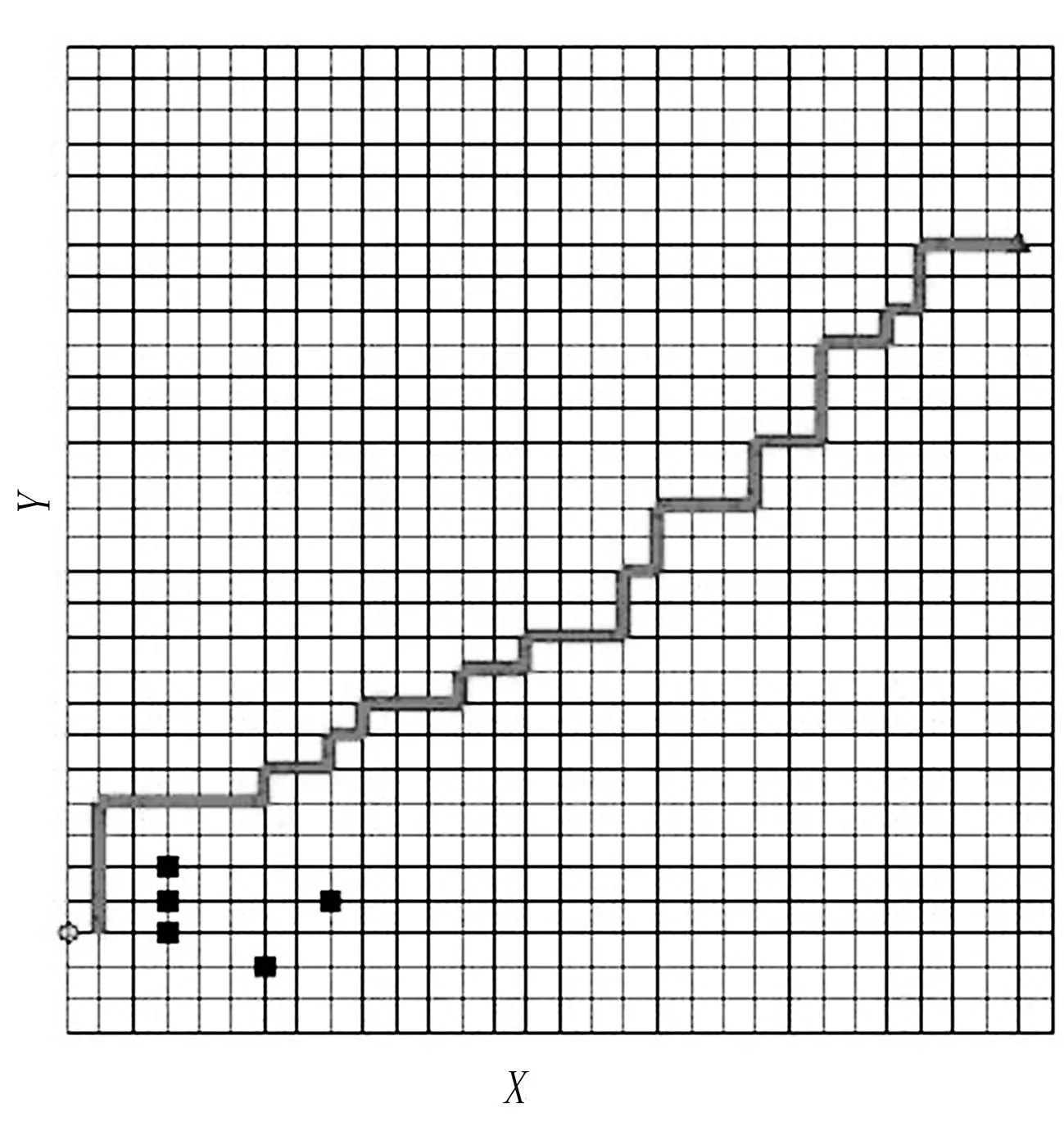
图10 机器人采摘路径规划图
由图10可以看出:在遗传算法的优化作用下,机器人能够以最短的路径顺利到达理想的采摘位置,算法性能较好。
为了对粗糙集算法的可靠性进行直观地显示,使用C++编程的方法对粗糙集算法进行性能实验,结果如表3所示。通过测试发现:使用粗糙集可以大大降低所需训练种群的数目,降低平均迭代次数,不需要CPU时钟单元,大大提高了机器人的计算性能。
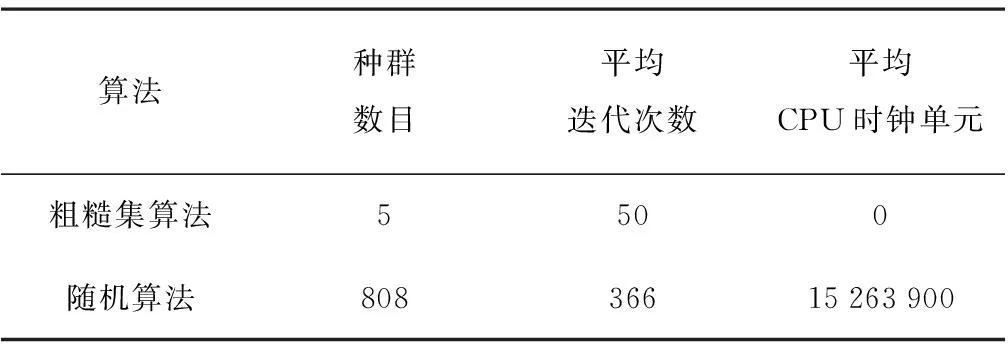
表3 采摘机器人粗糙集算法性能测试结果
为了验证采摘机器人算法性能的可靠性,在增加障碍物的复杂程度、其他参数均相同的情况下,对粗糙集遗传算法和普通遗传算法的性能进行了测试,结果如表4所示。由表4可以看出:使用粗糙集遗传算法有效地提高了路径规划的速度,从而大大提高了机器人的采摘作业效率。
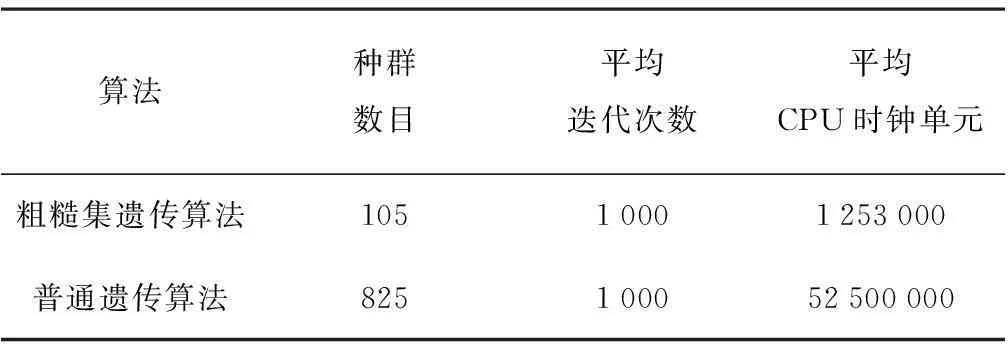
表4 采摘机器人遗传算法性能测试结果
4结论
1)为了提高采摘机器人路径规划的速度和精度,使用粗糙集对遗传算法的路径规划方法进行了改进,并在二维栅格地图环境下,对决策表进行了优化设计,将其作为遗传算法的初始化种群,从而大大提高了路径规划的效率。
2)对采摘机器人的性能进行了测试,包括果实图像提取与识别和路径规划能力。通过测试发现:机器人视觉系统可有效完成果实图像的提取识别及路径的搜索和规划。同时,使用粗糙集后的遗传路径规划耗时更短,平均迭代次数更少,从而提高了机器人采摘作业效率,为高效果蔬采摘机器人研究提供了较有价值的参考。
参考文献:
[1]陈磊,陈帝伊,马孝义.果蔬采摘机器人的研究[J].农机化研究,2011,33(1):224-231.
[2]梁喜凤,杨犇,王永维.番茄收获机械手轨迹跟踪模糊控制仿真与试验[J].农业工程学报,2013, 29(17):16-22.
[3]张建锋,何东健,张志勇.采摘机器人自适应鲁棒跟踪控制算法设计[J].农机化研究,2009,31(12):10-14.
[4]吴忠强,张晓霞,舒杰.柔性机器人基于自适应模糊动态面的实用稳定控制[J].中国机械工程, 2012,23(19):2297-2301.
[5]过希文,王群京,李国丽.基于动态面的机械臂轨迹跟踪神经网络自适应算法[J].系统仿真学报, 2011,23(11):2327-2332.
[6]李晓刚,刘晋浩.基于反演设计的码垛机器人神经网络自适应控制[J].包装工程,2012,33(1): 80-85.
[7]金雷泽,杜振军,贾凯.基于势场法的移动机器人路径规划仿真研究[J].计算机工程与应用,2007,43(24):226-229.
[8]由畅宇,韩建达.一种移动机器人在三维动态环境下的路径规划方法[J].计算机应用与软件, 2009,26(8):223-224,234.
[9]伊连云,姚俊红,付莹莹,等.基于自主视觉足球机器人路径规划的研究[J].机械工程与自动化,2006(2):67-69,72.
[10]黄彦文,曹其新.Robocop比赛环境下足球机器人路径规划研究[J].智能系统学报,2007(4):52-57.
[11]余群明,曹益,严钦山,等.基于改进型遗传算法的足球机器人路径规划[J].计算机仿真,2008,25(2):178-180,236.
[12]王丙强,宋弘.两级BP网络在机器人传感器融合中的应用[J].微计算机信息,2009,25(23):192-194.
[13]李继勇,赵德彪,张静.基于BP神经网络的供应链风险预警研究[J].河北工程大学学报:自然科学版,2011,28(3):83-87.
[14]周芳,朱齐丹,赵国良.基于改进快速搜索随机树法的机械手路径优化[J].机械工程学报,2011 (11):30-35.
[15]Goh Shy ChyanS.G.Ponnambalam.Obstaclea voidance control of redundantr obotsusing variants of particles warm optimization[J].Robotics and Computer Integrated Manufacturing,2011,25(8):282-285.
[16]梁喜凤,王永维,苗香雯.番茄收获机械手避障运动规划[J].农业机械学报,2008,39,(11):89-93.
[17]宋勇,李贻斌,栗春,等.基于神经网络的移动机器人路径规划方法[J].系统工程与电子技术,2008(2):316-319.
[18]张美玉,黄翰,郝志峰,等.基于蚁群算法的机器人路径规划[J].计算机工程与应用,2005(25):34-37.
[19]孔令军,张兴华,陈建国.基本蚁群算法及其改进[J].北华大学学报:自然科学版,2004(6):572-574.
[20]罗德林,吴顺祥.基于势场蚁群算法的机器人路径规划[J].系统工程与电子技术,2010(6):1277-1280.
[21]许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011(3):220-222.
Path Planning of Picking Robot Based on Rough Set and Genetic Algorithm
Cai Jiong1, Wang Xiaozhi2,3
(1.Panzhihua University, Panzhihua 617000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108, China; 3.Wuhan University of Technology, Wuhan 430070, China)
Abstract:In order to improve the speed of acquisition robot path planning, improve the intelligent level of the robot autonomous navigation,it proposed a path planning method based on rough set and genetic algorithm, thus it can effectively improve the speed and precision of path planning.Based on the actual fruit picking environment, by using the technology of image segmentation robot on fruit target identification, in a 2D grid map of the environment, it can make a decision table,and the use of rough set attribute reduction of decision table is,to get the minimal decision table.As the initial population of genetic algorithm,it introduced genetic crossover and copy operation, optimal path planning algorithm. In order to verify the picking robot algorithm performance reliability, the picking robot performance were tested, which test items include fruit image recognition and robot path planning ability.It was found by testing that picking robot can effectively segment extracted fruit ripening, and it can complete the objectives and tasks. The performance of rough set and genetic algorithm was tested by using the rough set,which can greatly reduce the required number of training population. To reduce the average number of iterations, increase the complexity of the obstacle.It can significantly improve the path planning speed, thereby improve the efficiency of picking robot by using rough set genetic algorithm.
Key words:picking robot; path planning; genetic algorithm; autonomous navigation; rough set; decision table
中图分类号:S225.91;TP242
文献标识码:A
文章编号:1003-188X(2016)08-0189-05
作者简介:蔡炯(1970-),男,四川南充人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,副教授,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-07-30
