BLDC控制系统中PWM调制方式分析与比较
2016-03-18史召峰孙承峰
史召峰, 孙承峰
(1.安徽工业经济职业技术学院 机电工程系,合肥 230051;2.苏州大学 机电工程学院,江苏 苏州 215021)
BLDC控制系统中PWM调制方式分析与比较
史召峰1, 孙承峰2
(1.安徽工业经济职业技术学院 机电工程系,合肥 230051;2.苏州大学 机电工程学院,江苏 苏州 215021)
摘要:介绍了无刷直流电机控制系统中的5种PWM调制方式,并从开关损耗、调制方式的极性和对换向转矩脉动的影响这三个角度来分析和比较了这几种PWM调制方式的优劣.通过理论推导,证明当控制系统采用PWM-ON调制方式,六只开关管的开关损耗得到了均匀的分配,并且直流无刷电机在换向过程中的转矩脉动最小.最后通过实验验证了结论的正确性.
关键词:直流无刷电机;PWM调制方式;开关损耗;换向转矩脉动
具有梯形波反电动势的永磁无刷直流电动机具有高功率密度、控制简单等特点,应用非常广泛.其驱动逆变器多采用三相半桥结构形式,工作于二二导通、三相六状态的120°导通方式,一般采用PWM调制方式进行速度及电流的调节,由于BLDCM相电感的存在使电枢绕组电流从一相切换到另一相时,产生换相延时,形成电机换向过程中的转矩脉动[1-3].当采用的PWM调制方式不同时,对系统的影响也不一样,当然对换相转矩脉动的影响也不一样.在文献[4]中,只分析了ON-PWM、PWM-ON、H_PWM-L_ON、H_ON-L_PWM四种不同调制方式对换相转矩脉动的影响,并没有分析H_PWM-L_PWM对换相转矩脉动的影响.在本文中,介绍了无刷直流电机控制系统中的ON-PWM、PWM-ON、H_PWM-L_ON、H_ON-L_PWM、H_PWM-L_PWM 5种PWM调制方式.
15种调制方式的分析与比较
三相永磁无刷直流电机工作于120°导通方式下时,常见的PWM调制方式有以下5种:①H_PWM-L_PWM上下桥臂开关管均进行PWM信号调制(导通两相上的开通开关管同时进行PWM调制);②ON-PWM:在开关管导通的120°期间,各管前60°电角度保持恒通,后60°电角度进行PWM信号调制;③PWM-ON:各管前60°电角度受PWM信号调制,后60°电角度恒通;④H_PWM-L_ON:上桥臂开关管受PWM信号调制,下桥臂开关管保持恒通;⑤H_ON-L_PWM:上桥臂开关管保持恒通,下桥臂开关管进行PWM信号调制.[5]如图1所示:
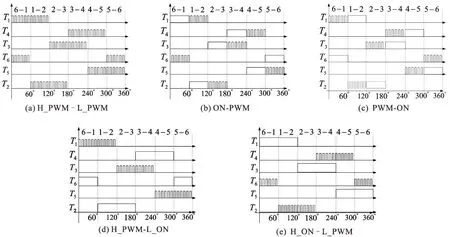
图1 5种PWM调制方式的输出波形
1.1从器件开通和关断损耗角度分析5种PWM调制策略
在五种PWM调制方式中,采用图1中(a)的调制策略时,六只开关管都需要进行脉宽调制,其所带来的开关损耗为其它几种调制方法的两倍,降低了控制器的效率.另外在相同的平均电磁转矩下,单斩方式比双斩方式的稳态转矩脉动小,单斩方式的绕组电流稳态值要大于双斩方式的绕组电流稳态值.因此,通常不采用图1(a)所示调制策略;图1中(d)和(e)所示调制策略由于六个开关管的开通和关断损耗没有均匀的分配而很少被采用.而图1中(b)和(c)所示调制方式在开关管导通的120°期间,开关管有60°电角度受PWM信号调制,60°电角度保持恒通,这两种调制策略使得六只管子的开通和关断损耗得到合理地分配而被采用的最多.
1.2从5种PWM调制策略的输出极性去分析和比较
在所有逆变器的脉宽调制方式中,按其输出电压极性可以分为单极性脉宽调制和双极性脉宽调制.单极性脉宽调制下,逆变器的输出电压极性不会发生变化,而双极性脉宽调制则相反.对于以上提及的5种PWM调制策略,图1中(b)~(e)属于单极性脉宽调制,(a)属于双极性脉宽调制,由于双极性脉宽调制有电流脉动大的缺点,一般很少被采用.
1.3从换向转矩脉动的角度来分析和比较5种PWM调制方式
永磁无刷直流电机工作于120°导通方式下时,其工作过程可分两个区间,一个是导通相电流增加、关断相电流减小且每相绕组都有电流流过的换相区间.[5]另一个区间为非换相区间,在这个区间内,三相绕组中只有两相绕组有电流流过.
永磁无刷直流电机采用不同的PWM调制方式时,每相绕组流过的电流会因为开关管的开关方式而出现不同的幅值和流向,这会使电机产生换相转矩脉动.下面将详细叙述不同调制方式下的换相转矩脉动的推导过程.
换相发生在上桥臂:eA=eB=E=keω,eC=-keω;
换相发生在下桥臂:eA=eB=-E=-keω,eC=keω.
又因iA+iB+iC=0,则下桥臂和上桥臂换相时的电磁转矩计算公式可分别由式(1)和(2)来表示:
(1)
(2)
式中:ω为电机速度(rad/s),ke为电磁转矩常数,p为极对数.由此可知,换相前后的电磁转矩计算公式一样.这说明,只要保证换相期间没有换相的那相电流和换相前电流幅值相同,则换相期间没有转矩波动.
1.3.1H_PWM-L_PWM调制策略下转矩波动分析
以下桥臂开关管换相为例,分析从A相换流到B相的换相过程,分析的结论同样适合上桥臂换相.设从A相换流到B相的换相期间,D1续流,T4为关断管,T6为开通管,T5为非换相管,T5T6同时进行脉宽调制,在换相期间的电流回路如图2所示:
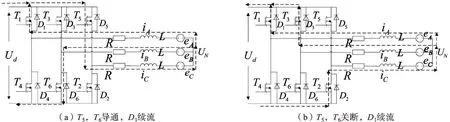
图2 H_PWM-L_PWM调制策略下下桥换相时A相续流回路
A相续流时电机每相端电压平衡方程为:
(3)
(4)
(5)
在换相期间内有eC=-eB=E=keω,ke为电磁转矩常数,而eA是一个斜坡函数.另外中性点电压UN还受PWM调制方式的影响,因此其动态表达式实际上是一个非常复杂的函数.由于换相过程比较短,令eA=-keω.[6]同时令式(4)和(5)中的S≈D,式中D为当前PWM脉冲占空比,则式(4)、(5)可简化为:
(6)
(7)
由式(3)、(6)和(7)可求得:
(8)
在下桥换相前,iC(0)=-iA(0)=i0(i0是相电流在稳定状态下的值),iB(0)=0.将式(8)代入式(7)并结合iC(0)=i0可解得:
(9)
再根据式(2),可得换相过程的转矩为:
(10)
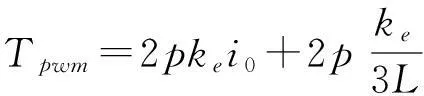
由前面分析可知,下桥臂没有换相前所产生的转矩为:Te_l=2pkei0,则换相过程产生的转矩波动为:
(11)
1.3.2其余4种脉宽调制策略下电磁转矩脉动分析
经过分析发现,换相时,脉宽调制发生在开通管时所产生的转矩脉动和脉宽调制发生在非换相管时所产生的转矩脉动是不一样的.前者我们归结为第一类,后者归结为第二类.
由以上分析可知:所有调制策略中能归结到第一类的有:PWM-ON型调制策略、换相发生在上桥臂的H_PWM-L_ON型调制策略和换相发生在下桥臂的H_ON-L_PWM型调制策略;可归结到第二类:ON-PWM型调制策略、换相发生在上桥臂的H_ON-L_PWM型调制策略和换相发生在下桥臂的H_PWM-L_ON型调制策略.可以证明只要不同的调制策略下有相同的续流过程,它们所产生的换向转矩脉动是一样的.
2实验结果
以一台额定转速为3 000 rpm的无刷直流电机为实验电机,用Microchip公司dsPIC33FMC204单片机作为控制系统的核心进行了实验论证,图3中的(a)~(e)分别为5种调制策略下所得到的相电流实验波形.
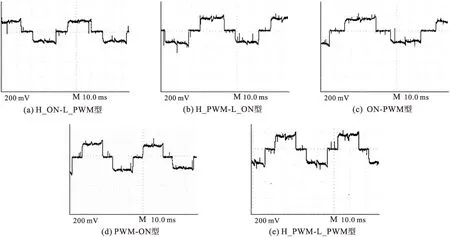
图3 5种调制策略下相电流波形
由实验波形及其分析可知,无论哪一桥臂进行换相时,脉宽调制发生在开通管时所产生的转矩波动均比脉宽调制发生在非换相管时所产生的转矩波动要小,而换相过程中产生转矩波动最大的是H_PWM-L_PWM调制策略.
3结语
本文阐述了无刷直流电机控制系统中的5种PWM调制方式,并从开关损耗,调制方式的极性和对换向转矩脉动的影响这三个角度来分析与比较了这几种PWM调制方式的优劣;最后得出结论:当控制系统采用PWM-ON调制方式时,六只开关管的开关损耗得到了均匀的分配,并且直流无刷电机在换向过程中的转矩脉动最小.实验结果与波形也充分证明了所得结论的正确性.
[参考文献]
[1]CHANG G K,JOONG H L.A Commutation torque minimization method for brushless DC motors with trapazoidal elcetro motive Force[C].ICPE,Korea,1988(1):476-481.
[2]王凤翔,郑柒拾.永磁无刷直流电机的转矩计算及结构参数对转矩的影响[J].电机与控制学报,2001(2):188-203.
[3]张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003(2):87-91.
[4]齐蓉,林辉,陈明.无刷直流电机换向转矩脉动分析与抑制[J].电机与控制学报,2006(3):287-290,295.
[5]陈冬,房建成.非理想梯形波反电势永磁无刷直流电机换相转矩脉动抑制方法[J].中国电机工程学报,2008(30):79-83.
[6]韦鲲,任军军,张仲超.应用于无刷直流电机的新PWM调制方式[J].电气传动,2005(2):37-40.
[责任编辑王新奇]
Analysis and Comparison of PWM Modulationin Brushless DC (BLDC) Motor Control System
SHI Zhao-feng1, SUN Cheng-feng2
(1. Department of Electrical and Mechanical Engineering, Anhui Technical College of Industry and Economy, Hefei
230051, China; 2. School of mechanical and electrical engineering, Soochow University, Suzhou 215021, China)
Abstract:In this paper, five PWM modes used in the brushless DC motor control systems were introduced. Their advantages and disadvantages were analyzed and compared from three aspects such as switch loss, the polarity of modulation mode and the influence on the commutation torque ripple of brushless DC motor. Through theoretical derivation, it was proved that when the control system adopted PWM-ON modulation mode, the switching loss of six switches was distributed evenly, and the torque ripple of brushless DC motor in the process of commutation was minimum. Finally, the experimental results show that the conclusion is correct.
Key words:brushless DC motor (BLDC); PWM modulation mode; switch loss; commutation torque ripple
中图分类号:TM351
文献标志码:A
作者简介:史召峰(1978—),男,安徽合肥人,安徽工业经济职业技术学院机电工程系讲师,硕士,主要从事机电控制、CAD/CAM/CAE技术研究.
基金项目:安徽省省级教学研究项目(2014jyxm559)
收稿日期:2015-09-16
文章编号:1008-5564(2016)01-0036-05