按压检测机械手的设计及研究
2016-03-18Designandresearchforpressiondetectionmanipulator
Design and research for pression detection manipulator
陆 地1,任 龙1,王 胜2
LU Di1, REN Long1, WANG Sheng2
(1.西安建筑科技大学 机电工程学院,西安 710055;2.西安西京大学,西安 710000)
按压检测机械手的设计及研究
Design and research for pression detection manipulator
陆地1,任龙1,王胜2
LU Di1, REN Long1, WANG Sheng2
(1.西安建筑科技大学 机电工程学院,西安 710055;2.西安西京大学,西安 710000)
摘 要:针对传统智能坐便器检测装置夹具的灵活性不够、检验过程人员劳动强度大、效率低的不足,提出了一种新型机械手的智能坐便器检测装置。介绍了新型机械手的工作原理,硬件实现。该改进的机械手检测装置具有自动化程度高、检测范围大、检测精度好、易于维修维护的特点。
关键词:检测装置;机械手;自动化;智能坐便器
0 引言
随着人们对生活品质的追求,许多家庭都开始青睐于使用智能坐便器。为了解智能坐便器的质量状况,向消费者提供客观、公正、可比较的信息,坐便器的质量检验成为重要环节[1,2]。传统的坐便器质量检验采用固定夹具,夹具上连接气缸来检测按键的按压寿命。但是夹具的灵活性不够,因此一台设备或者(一套夹具)只能检测一种型号的智能坐便器。且检验过程需要人员全程参与,劳动强度大,效率低。
本文是一种在老式按压检测设备上做出的改进,用机械手替代了原先的固定夹具带动气缸的按压方式,机械手是将一些通用部件(如手臂伸缩部件,升降部件、回转部件和腕部回转、俯仰部份等)根据作业的要求,选择必要的能完成预定机能的单元部件,以机座为基础进行组合,配上与其相适应的控制部分, 即成为能完成特殊要求的机械手。机械手检测装置做到了所检测位置的覆盖面积增大,检测点位精度提高,且更灵活、更方便,可用于各种不同型号的智能坐便器的检测。
1 机械手国内外研究综述
机器手是当今社会一门迅速发展起来的工业控制设备,具有效率高,可靠性强,劳动强度低等特点,随着社会的发展和人们生活水平的提高,各种各样的机器手也被开发出来去适应制造领域以外的各个行业[3,4],国内外许多学者做了卓有成效的研究。
国外在这方面研究开展较早,成果很多。Yamamoto Y[5]、Salehi[6]、Tahboub[7]、Tchon[8]等人研究了机械手控制器的设计;Seraji H[9]和Carriker W F[10]研究了机械手的路径规划问题;Farkhatdinov[11]和Bai,Xiaobo[12]研究了机械手的远程控制问题;
国内的机械手研究起步较晚,但也取得了一定的成果。清华大学的徐文立教授设计了鲁棒控制器[13]。北京科技大学的余达太教授提出了机械手优化准则,并利用遗传算法进行了求解[14]。上述研究工作对我国开展移动机械手的研究及应用起到了积极的推动作用。
2 原有检测系统分析
本检测设备依据GB/T 23131–2008标准,按照其中第6.1.4,6.1.5,6.7条,及附录A,3条等相关内容,对智能坐便器冲洗装置,整机寿命,等性能进行检测。 其由试验柜与控制柜两部分组成。试验柜分为三部分,一部分为坐便器安装固定小车及集水槽,二部分为模拟900牛重量运动部件,三部分为智能座便器控制按钮按压装置,如图1所示,整个实验机由透明有机玻璃和不锈钢钢板组合密封,方便实验功能可视化。
控制柜为触摸屏与紧急按钮控制方式。
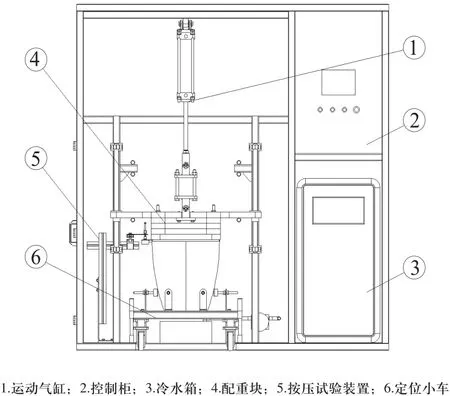
图1 改进前的检测设备
设备主要参数:外观尺寸:
1800mm(长)×1400mm(宽)×1900mm (高);
试验柜尺寸:
1260mm(长)×1400mm(宽)×1900mm (高);
控制柜:
540mm(长)×830mm(宽)×1900mm (高);
气源压力:≥0.55MPa;
水源温度:(15±2)℃;
水源压力:(0.18±0.02)MPa;
总用气量:≤42L/Min;
进气接口:Φ10气管快插连接方式。
原有智能坐便器一个完整的检测工作流程为按压停止按钮→臀部洗净按钮→间隔30秒→停止按钮→轻柔洗净按钮→间隔30秒→停止按钮→干燥按钮→间隔35秒,此为一个完整的流程。由于智能坐便器的工作全部由按钮控制,因此按钮的工作寿命是马桶寿命的主要指标之一,并且在按钮按下的同时,智能坐便器同时启动并工作。一般规定,马桶按钮应该保证连续按压5000次不损坏,与此同时,智能坐便器也同时运行5000个工作流程,保证运行过程稳定,无异常。坐便器的整体检测系统就是通过气泵驱动气缸,使气缸上的测试装置连续撞击马桶上的控制按钮,每次撞击代表按钮的一次按压过程,经过5000个整体工作流程的撞击,验证按钮是否达到要求的使用寿命,同时检测智能坐便器是否出现异常。旧式的检测装置主要分为两个部分——支架和夹具:
1)支架:首先安装底座是通过L型安装板固定到设备的机架上的,然后通过40×40的铝型材引出到需要按压试验的按键上方,如图2所示。
2)夹具:是通过气缸安装板,上安装5个SMC的缸径为Φ6的微型气缸,来对控制器上的停止,臀部洗净,轻柔洗净,干燥,强力冲洗共5个按键进行按压试验,如图2所示。
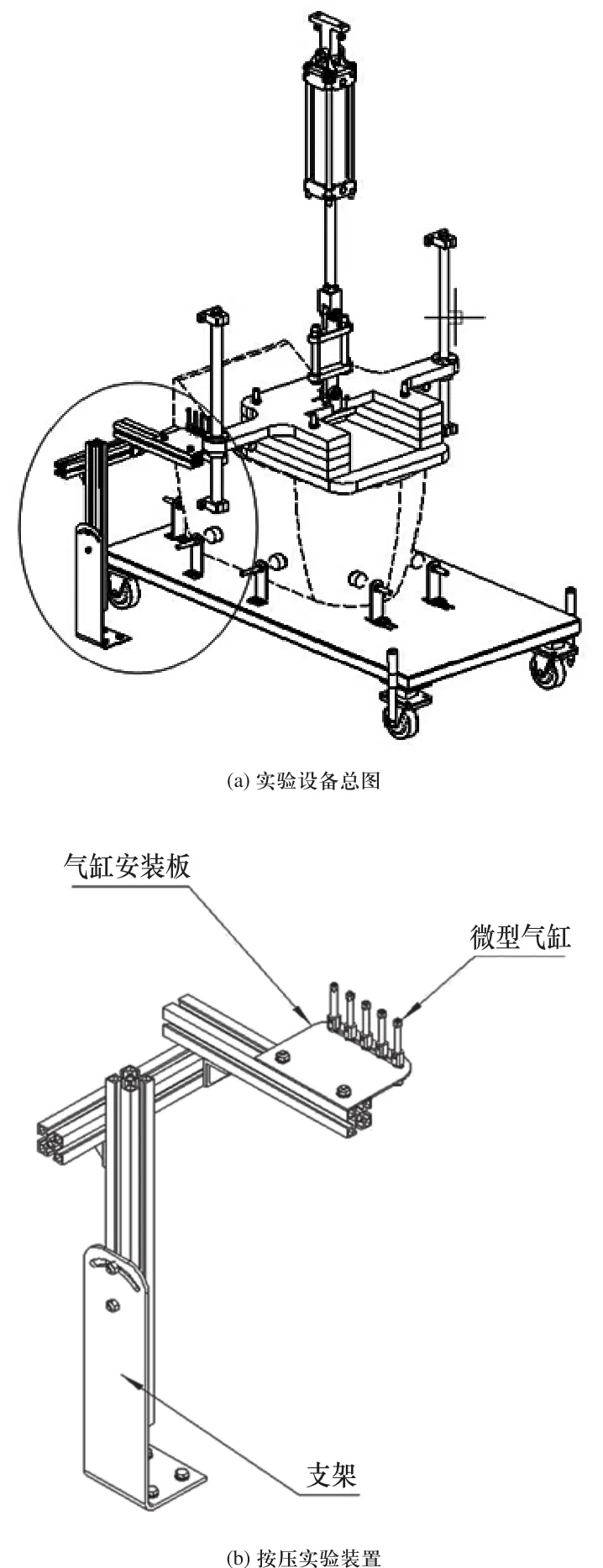
图2 改进前的设备结构
纵观此按压检测方案,虽然可实现对固定型号的智能坐便器做稳定的检测与试验,但其实存在较多不足:
1)所用SMC微型气缸过多,在实际操作中,由于夹具一般安置在设备内部,故运行成本过高,故障率高,维修困难。
2)采用固定夹具装夹气缸的方式,只适合于一种或者少数几种型号的只能坐便器,对于其他型号的智能坐便器,其控制面板在不同位置时,这种检测方式则不适用。
3 新型检测机械手的设计
3.1 基本思想
针对老式检测装置的不足,本文设计一种可适用于多种型号智能坐便器的检测方案。方案采用组合式移动机械手代替原有检测装置,新型的机械臂部分是由组合式机械手组成的,一共有三个自由度,即上下,左右,前后(X轴,Y轴,Z轴)三个自由度。通过机械手的运转,实现多种坐便器的检测。新型的机械手工作时,首先通过PLC将气缸运行到所需按压的点位,对准然后通过控制系统记录下此点位的位置,一共5个检测点位,后将机械手退回到坐标原点,运行连续动作,进行反复5000次检测动作。
改造后的机械手如图3所示。

图3 新型检测机械手
该方案简化了检测装置的结构,兼顾了使用上的专用性和设计上的通用性,便于标准化、系列化设计和组织专业化生产,有利于提高机械手的质量和降低造价,是一种有发展前途的机械手。
3.2 机械手硬件组成
实现手部按压动作的小型标准气缸采用气源控制,引出气源后先通过SMC品牌的过滤减压阀,使压力平稳的输出,保证压力稳定,过滤减压阀型号为AW30-03BDG,耐压环境为1.5MPa,最高使用压力为1.0MPa,设定压力范围为0.05MPa~0.7MPa,过滤精度为5um,并接压力表,压力表连接口径为Rc1/8。
过滤减压阀后连接一个SMC品牌的精密减压阀,型号为IR1020-01,其作用使气流的压力降低,同时借助阀后压力的作用调节启闭件的开度,使阀后压力保持在一定范围内,最大耗气量为4.4l/min在1.0MPa压力下,设定的压力范围为0.01MPa~0.8MPa,接管口径为Rc1/8。
然后接SMC品牌的两位五通先导式电磁阀,型号为SY3120-5DD-C4-F2,机能位数为2位单电控,使用压力范围为0.15MPa~0.7MPa,最高动作频率为10Hz,使用电压为24VDC,并装配2个消音器,可接直径为Φ4mm快换接头。
实现手部按压动作的时采用SMC品牌的CJ2系列标准型气缸,型号为CJ2B6-15,缸体直径为Φ6mm,安装形式为基本安装形式,无内置磁环,行程为15mm,气缸的活塞杆末端安装一个尼龙块,做按压动作时实现对按压物体的缓冲保护。
气缸上装配两个SMC品牌的速度控制阀,型号为AS1201F-M5-04,保证耐压力为1.5MPa,最高使用压力为1MPa,最低使用压力为0.1MPa,控制方式为进气节流。
实现左右(X轴方向)运动的采用IAI品牌的小型X轴标准滑块,型号为ISPB-SXM,采用伺服电机,导程为8mm,行程为800mm,最高运行速度达480mm/s,最大负载能力为27kg,驱动方式为滚珠丝杠,基座材质为铝制且表面经过白色耐酸处理。
实现前后伸出(Y轴方向)的运动采用IKO品牌的RCP4系列的拉杆型电缸,型号为RCP-RA6C-I-56P-24-200-P3,导程为24mm,垂直最大负载为3kg,行程为200mm/s,最高运行速度可达600mm/s,驱动方式为滚珠丝杠。
机械臂部分,用于实现上下(Z轴方向)移动的是SMC品牌的LEFS系列的薄型电缸,和一个直线导轨组成,电缸型号为LEFS25AB-600B-R3AP3,缸径为25mm,行程为600mm,驱动方式为滚珠螺杆驱动并带自锁功能,最高垂直重量可达16kg,最高运行速度为250mm/s;直线导轨可采用品牌THK的LM系列标准光轴,直径为Φ30mm,长度为700mm,配合SL型滑块,型号为SL30UU。电缸和直线导轨相互平行且垂直于地面放置。
以上3个方向的电缸相互之间均采用夹具连接固定,夹具材料为304#不锈钢。
3.3 PLC硬件实现
由于机械手要实现复杂操作,因此控制器采用PLC作为自动化检测的核心装置。依据检测装置的实现思想,PLC主要的功能有:
1)以启动按钮为输入信号,机械手的各轴向电机为输出,实现机械手在X轴、Y轴与Z轴的移动,输入、输出信号采用开关型;
2)机械手的行程控制,以X轴、Y轴与Z轴安装的行程开关为输入信号,机械手的各轴向电机为输出,实现机械手在X轴、Y轴与Z轴的停止,输入、输出信号采用开关型;
3)机械手的按压启动信号,以机械手的到位检测传感器为输入信号,产生5000个脉冲信号,驱动气缸的按压动作。输入、输出信号采用开关型;
4)机械手的停止、急停控制,以停止按钮为输入信号,机械手的各轴向电机为输出,当控制器接受到停止、急停信号后,各轴向电机动作停止;
本文采用OMRON公司的CPM1A的PLC,该型号PLC属于小型PLC,采用20输入输出型,其中输入12点,输出8点。PLC地址分配如表1所示。

表1 PLC地址分配表
3.4 其他元件硬件实现
本文采用的PLC、电机等均需要电源,对各元件的电源系统进行如下设计:
PLC电源采用交流50Hz,220V电源供电,由于PLC的输出信号为直流24V,因此检测装置的驱动电机均选择24V可充电电池,三个轴向运动的驱动电机为步进式电机或伺服电机;
机械手的检测装置分别进行如下设计:到位检测传感器采用RPR220型一体化反射型光电传感器;检测装置由SMC微型直线式气缸驱动,直线活塞运动,缸体固定,缸体直径Φ6mm,行程为30mm;
此外,机械手采用直角坐标形式,实现机械的移动;机械手手部形式采用气动式,气动装置为空气压缩机。
原有的检测装置可用于检测TOTO(品牌)所生产的型号为TCF326CS/TCF306CS的智能坐便器,这种坐便器的控制面板放置在坐便器的右手边,且为水平放置。本检测机械手不仅可适用于上述型号的智能坐便器,由于其广泛的适用性,现在可适用于各种型号尺寸的智能坐便器,包括不同的高度,控制面板在坐便器的左边或者右边均可。由于本机械手本身不带旋转自由度,故仍然只适用于控制面板是水平放置的产品。如若要检测的智能坐便器的控制面板是水平放置的,后期可再对本机械手加入旋转自由度。
4 结束语
本文设计的新型检测机械手具有以下优点:采用了组合式机械手的检测方案,使设备结构更加稳固,各部分组态元件易于更换;可实现对各种型号智能坐便器的检测,提高了品种的检测范围,改观了原设备先前对一些型号的智能坐便器检测时带来的不便;具有检测覆盖范围增大,检测精准度高;通过PLC的控制,可实现在设备长时间工作时,对出现的位置偏离等问题作出自动补偿;技术成熟,可靠性高,该装置具有相当高的检测性能。设备适用范围大,节约检测成本。
参考文献:
[1] 中华人民共和国建筑工业行业标准JG/T 285-2010.坐便洁身器[S].
[2] 赵维波.解读GB/T 23131-2008《电子坐便器》[J].家电科技, 2010,(4):51-53.
[3] 徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001,(3):7-14.
[4] 王炎,周大威.移动式服务机器人的发展现状及我们的研究[J].电气传动,2000,30(4):3-7.
[5] Yamamoto Y. Coordinating locomotion and manipulation of a mobile manipulator[A].Decision and Control,1992.,Proceedings of the 31st IEEE Conference on. IEEE[C].1992(3):2643-2648.
[6] Salehi M, Vossoughi G. Impedance Control of Flexible Base Mobile Manipulator Using Singular Perturbation Method and Sliding Mode Control Law[J].International Journal of Control Automation & Systems, 2008,6(5):677-688.
[7] Tahboub, Karim A. Robust control of mobile manipulators[J]. Journal of Robotic Systems,1996,13:699-708.
[8] Tchon K, Muszynski R. Instantaneous kinematics and dexterity of mobile manipulators[A].Robotics and Automation, 2000. Proceedings.ICRA '00. IEEE International Conference on. IEEE[C].2000(3):2493-2498.
[9] Seraji H. Motion Control Of Mobile Manipulators[J].Intelligent Robots & Systems Iros Proceedings of the IEEE/RSJ Internation, 1993,3:2056-2063.
[10] Carriker W F,Khosla P K,Krogh B H,Path Planning for Mobile Manipulators for Multiple Task Execution[J].IEEE Transactions on Robotics and Automation,1991.7(3):403-408.
[11] Farkhatdinov I, Ryu J H, Poduraev J.A Feasibility Study Of Time-Domain Passivity Approach For Bilateral Teleoperation Of Mobile Manipulator[A].Control, Automation and Systems,2008. ICCAS 2008. International Conference[C].2008:272-277.
[12] Bai X, Li G, Suyin M, et al.A Computer Control System For Mobile Robot Manipulator[A].Systems, Man, and Cybernetics, 1988. Proceedings of the 1988 IEEE International Conference[C]. IEEE,1988:477-480.
[13] 董文杰,徐文立.移动机械手的跟踪控制[J].控制与决策,2001,16(6):914-917.
[14] 张硕生,余达太.轮式移动机械手的点一点运动规划方法[J].北京科技,2001,23(1):81-91.
作者简介:陆地(1961 -),男,副教授,工学硕士,研究方向为电气工程。
基金项目:西安建筑科技大学学科重点培育计划人才培养专项学科建设项目(XK201104,XK201223)
收稿日期:2015-08-12
中图分类号:TH134
文献标识码:A
文章编号:1009-0134(2016)01-0042-04
