月球六分之一微重力环境模拟装置的设计与实现
2016-03-17高德鹏杜庆安
高德鹏,杜庆安,吴 锐
(1.哈尔滨工业大学 计算机科学与技术学院,哈尔滨 150000;2.天津航天机电设备研究所,天津 300000)
月球六分之一微重力环境模拟装置的设计与实现
高德鹏1,杜庆安2,吴锐1
(1.哈尔滨工业大学 计算机科学与技术学院,哈尔滨150000;2.天津航天机电设备研究所,天津300000)
摘要:为了对在月球上工作的机械臂进行地面仿真实验,设计并实现了一套悬吊式的、以视觉伺服方式作为随动控制系统的月球六分之一微重力模拟装置;为了能够满足高精度、大视场、大景深、高频率的成像条件,设计了以LED光源主动发光为基础的目标标志器以及基于激光测距仪及双相机多传感器融合的视觉测量系统,提出了一套目标识别、检测和位置测量的方法;采用PMAC运动控制卡作为执行机构的控制器,实现对电机的数字PID控制;经过试验验证,所设计的系统操作简单、运行稳定、微重力模拟精度高。
关键词:微重力模拟;视觉伺服;随动系统
0引言
随着我国探月工程的发展,对月球微重力环境的模拟变得越来越重要。悬吊法是目前各国进行微重力模拟的主要方法[1],在悬吊法模拟过程中悬吊点必须跟随被测试目标的运动,由于随动偏差的存在将导致吊丝在水平方向产生一干扰力矩,破坏微重力模拟的力学环境,因此如何减小随动偏差是悬吊式微重力模拟的关键。
近年来,随着数字图像处理技术、模式识别、计算机视觉等领域的快速发展,以视觉测量作为反馈的视觉伺服系统被广泛应用于控制领域。视觉伺服系统与其他伺服系统相比具有明显的优势:可以实现非接触的测量、精度高、且具有良好的鲁棒性[2]。本文设计的月球六分之一微重力环境模拟装置,采用视觉伺服的方式作为随动控制系统,克服了悬吊式微重力模拟装置工作过程中随动偏差大、模拟精度低的的缺点。
1系统的结构设计
对于悬吊式微重力模拟方法,根据支架结构的不同,可以分为极坐标式和直角坐标式,极坐标式相对于直角坐标式占地面积小、运动灵活,因此在这里我们选用极坐标式,该形式的重力补偿装置主要包括支撑立柱、悬臂、吊车、吊索、配重以及滑轮组其结构如图1所示。
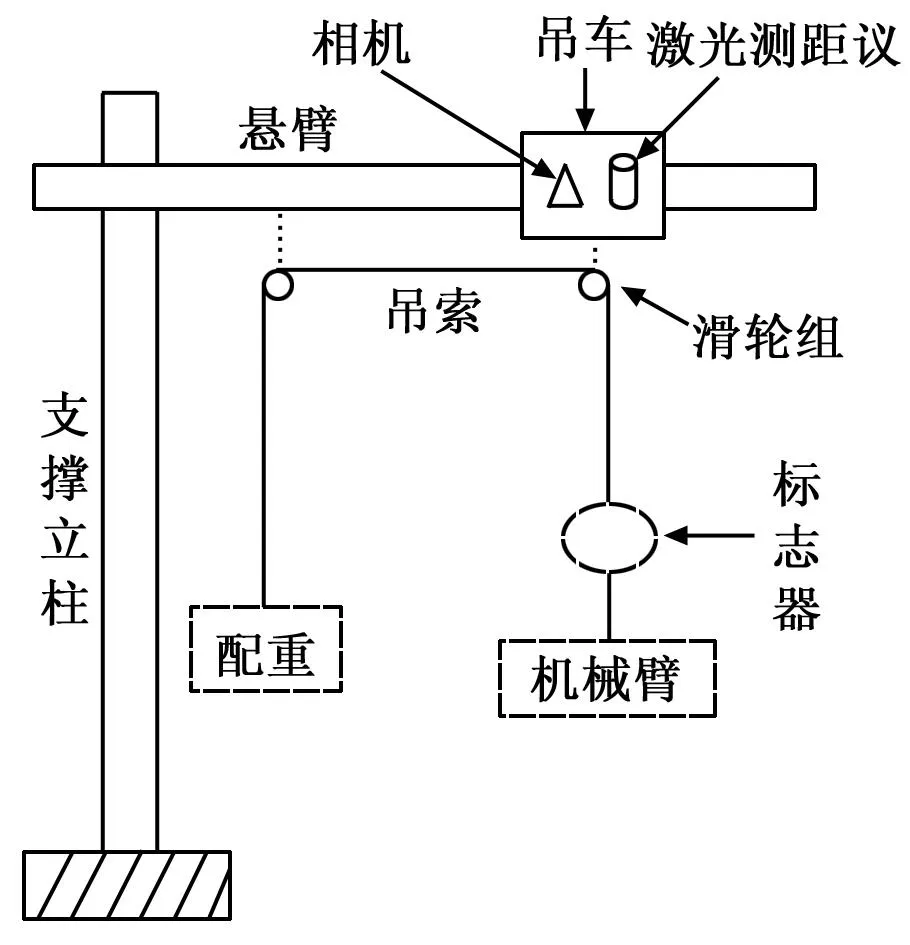

图1重力补偿装置结构图
在悬吊式微重力模拟过程中,随动系统的主要任务是尽量使连接机械臂的吊索保持与铅垂线方向平行,避免吊索产生水平方向的分力,破坏机械臂的受力环境,为此必须减小吊车与机械臂在水平方向上位置偏差。
由于视觉测量具有非接触的特点,避免了在吊索上安装传感器带来的附加力矩的影响,且视觉测量相对于其他光学测量方法而言结构简单、鲁棒性强,因此随动系统采用视觉伺服的方式。根据产生偏差信号位置的不同,可以将视觉伺服系统分为基于位置的视觉伺服和基于图像的视觉伺服。基于位置的视觉伺服系统的偏差信号产生于笛卡尔空间,反馈系统从视觉信息中得出操作对象在笛卡尔空间中的期望位姿,该位姿与实际位姿的偏差作为控制量,该方式控制器设计简单,应用十分方便[2-4]。基于位置伺服的随动系统的结构如图2所示。

图2 基于位置的随动系统结构图
整个系统可以分为控制子系统和测量子系统两部分,测量子系统作为随动系统的反馈主要负责采集图像并从图像中得到操作对象的实际位姿;控制子系统分为视觉控制器和执行机构控制器,将位姿偏差作为输入控制执行机构的实际运动。
2测量子系统的设计与实现
图像采集频率低、图像处理时间长是影响视觉伺服应用的主要原因,如何选取合适的图像特征保证图像处理的速度和目标定位的精度是测量子系统的关键,针对该问题设计了特定的目标标志器和一套图像处理算法。
2.1测量子系统的组成
测量子系统包括“臂上模块”和“吊点模块”,臂上模块包括相机、激光测距仪和电源;吊点模块包括目标标志器和电源。
目标标志器采用圆形对称状结构,直径200 mm,圆周上均匀分布着8个LED光源,中间开孔吊装在吊索上,在负载拉力作用下标志器将与吊索垂直,标志器采用轻质铝盘制成,加工过程中尽量减少质量以避免标志器重心偏移对吊索拉力的影响。
根据系统的任务指标要求视觉测量范围为3~8.5 m,在如此大的景深范围内单独一个相机很难同时保证视场范围和分辨率,因此设计了双相机模式,包括一个长焦相机和一个短焦相机,相机参数如表1所示。

表1 相机参数
长焦镜头为50 mm,在8.5 m处侧向位移分辨率可达0.627 3 mm;短焦镜头为25 mm,在3 m距离处视场可达856.8×645.6 mm。当成像距离大于5.25 m时采用长焦相机,否则采用短焦相机。
由于单独一个相机对成像距离不敏感,计算目标的三维坐标时误差比较大,所以测量系统配备了激光测距仪,用来测量相机到目标的实际距离,采用深圳盈勤科技有限公司生产的RWRFA-10型号的激光测距仪,测量范围为0.1~10 m,精度1 mm。
2.2图像处理算法
如何能够实现快速、准确的图像处理算法是解决视觉伺服频率低、延迟大的关键因素。
2.2.1特征选择
由于目标标志器的结构已知,所以我们选择每个光斑的质心和标志器的形状作为待检测的特征,光斑所在圆的圆心即为标志器的中心,这样的特征容易识别、对位置比较敏感且充分利用了目标的结构信息增加了特征的冗余,能够保证快速准确的目标定位[2]。
2.2.2滑动窗设置
为了能够提高目标检测的速度,增加系统的实时性,需要根据当前帧中目标的位置,对下一帧中目标的位置进行估计,在此采用8个跟踪窗口,每个窗口对应一个光斑。由于本系统中的机械臂运动属于准静态过程,相邻两帧中目标移动较少,且光斑大小基本不变,所以窗口的尺寸设定为略大于光斑的直径,窗口的中心与光斑中心重合,这样下一帧中只需要在跟踪窗口内进行目标检测,这样既减小了噪声的影响又提高了运算速度[5]。
2.2.3光斑质心的计算
采用质心法计算每个光斑的质心,设子窗口区域内的零阶矩为m00,沿水平方向和垂直方向的一阶矩分别为m10和m01,目标图像的灰度值用f(i,j)表示,那么可以通过式(1)和式(2)求子窗口中光斑的质心坐标(x,y)。
(1)
(2)
2.2.4标志器中心的计算
最小二乘法(又称最小平方法)是一种数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配。根据标志器的结构可知,8个光斑所在圆的圆心即为标志器的中心,因此采用最小二乘法来拟合光斑所在的圆,进而求得标志器的中心坐标[6]。
2.3目标位姿估计
对于基于位置的视觉伺服系统,必须知道目标在相机坐标系下的位姿,给系统提供反馈信息,才能实现对系统的控制。由于整个随动系统构成了一个极坐标系,因此必须将机械臂在相机坐标系下的坐标转换到极坐标系下,以便于计算电机的控制量。为了便于说明首先给出个坐标系的定义。
1)工作坐标系(极坐标系)OθR:以随动系统旋转机构旋转轴与悬臂的交点为原点,悬臂方向为径向建立的极坐标系为工作坐标系。
2)相机坐标系Oxyz:不考虑相机安装过程中的误差,可以认为相机坐标系的原点位于悬臂中心,Y轴沿悬臂径向,Z轴垂直向下,原点随着吊车的移动而移动。
由于本系统只需要在水平方向随动,所以可以不考虑Z轴,两个坐标系之间的关系如图3所示。
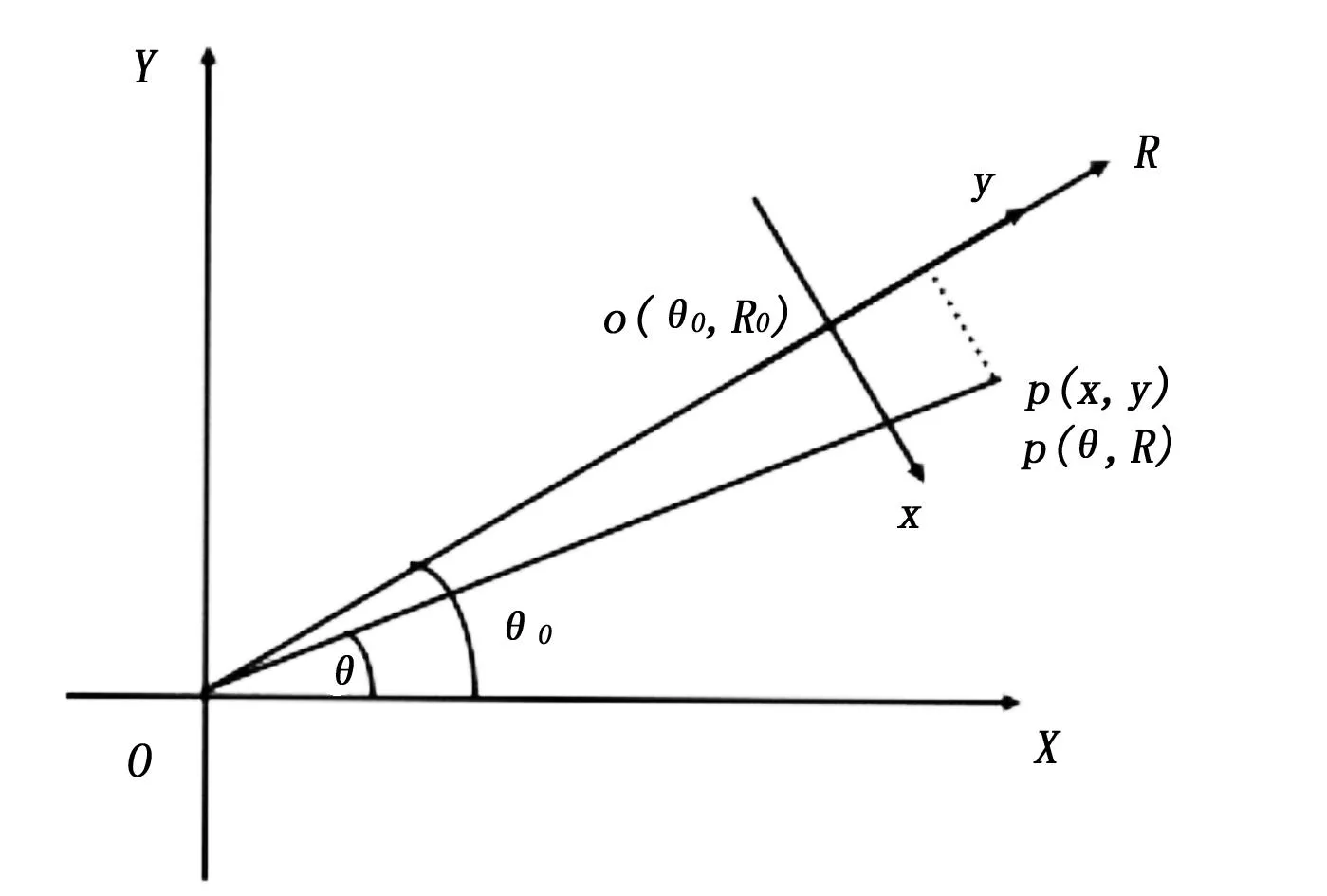
图3 坐标系位置关系图
如图所示相机中心点坐标为O(θ0,R0),标志器中心点在相机坐标系下的坐标p(x,y)根据摄像机针孔模型可以很容易求得,对应的在极坐标系下的坐标为p(θ,R),其表达式如式(3)和式(4)所示。
(3)
(4)
综上所述,测量子系统的工作流程主要包括如下几个步骤:
1)激光测距仪测量相机到目标的距离;
2)根据激光测距仪侧得的结果选择相应相机采集的图像;
3)如果第2步选择的相机由于意外情况没有采集到图像,则选择另外一个相机采集的图像;如果两个相机均没有采集到图像,则给出丢失目标的提示;
4)计算标志器中心坐标;
5)坐标变换,得到标志器中心在极坐标系下的坐标。
3控制子系统的设计与实现
如何能够控制执行机构快速、准确地按照系统给定的控制量运动,是随动系统能否满足精度要求的关键问题。
为了简化控制系统的设计,将控制系统分为两个部分:视觉控制器和执行机构控制器。视觉控制器根据采集到的图像信息,计算吊车跟踪机械臂运动所需要的速度和位移;执行机构控制器负责电机的具体执行。控制子系统的组成如图4所示。
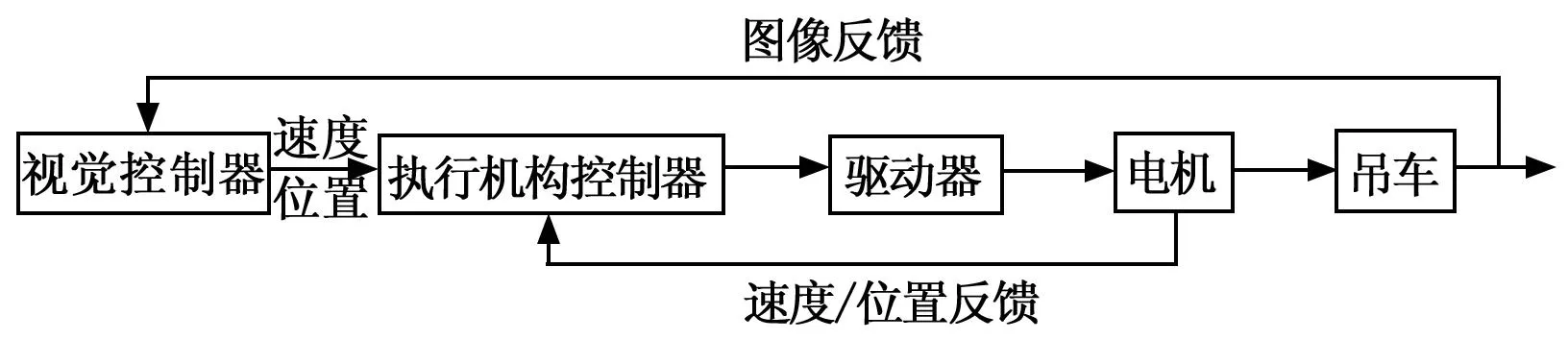
图4 控制子系统组成图
如图4所示,控制子系统形成了双层反馈:执行机构级的速度/位置反馈、视觉控制级的图像反馈,保证了整个系统能够稳定运行。
3.1视觉控制器的设计
为了实现悬吊点对目标的精确跟踪,必须对吊车的速度和位置进行闭环控制,因此水平随动系统采用了位移控制和速度控制两种控制策略,整个系统实现了位移和速度的双闭环。
3.2执行机构控制器
执行机构控制器直接负责电机的执行,由于系统要求响应速度快、稳态误差小、能够稳定地长时间工作,因此综合考虑各种控制方法的优缺点,最后选择了控制简单、稳定性好、误差小的数字PID控制器。
执行机构控制器采用PC机+PMAC控制卡的方式实现,PMAC的全称是可编程多轴控制器(Programmable Multi-Axis Controller),是由美国Delta Tau公司于1990年推出的,基于PC机以及Windows操作系统的多轴、多通道开放式运动控制器,包括一个数字信号处理器、机器接口、存储器、数字电子电路、电力电子电路,可以同时与多个主机通讯,支持多种通讯协议,包括USB/PCI/ISA总线通讯、Ethernet网络通讯、RS232串口通讯[7]。基于PC机和PMAC的控制系统组成如图5所示。

图5基于PC机和PMAC的控制系统组成图
4实验分析
本文所设计的月球六分之一微重力模拟装置支撑立柱高9 m,悬臂长4.85 m,悬臂系统总质量443.3 kg,悬臂系统的转动惯量为1 190 kg·m2,悬臂转动范围±90°。旋转方向的运动采用伺服直驱电机驱动,直线方向的运动采用伺服电机配减速机带动同步带的方式驱动。
为了验证系统的性能,首先必须对系统安装过程中的误差进行标定,主要包括两部分:标志器零位标定和悬臂倾角标定。
4.1标志器零位标定
由于安装位置的限制,吊丝和相机光轴不在同一条直线上,而是在两条近似平行的直线上,导致不同高度下标志器中心在图像上的零点位置不一样,因此必须对不同高度下标志器的零位进行标定。由于相机光轴和吊丝近似平行,所以标志器零点坐标可以用一条和高度相关的直线进行拟合,实际的标定过程中采集不同高度下的标志器零位坐标,利用最小二乘法对这些数据进行直线拟合,可以得到一条关于高度的函数,利用该函数便可以计算得到任意高度下标志器在图像上的零位。
4.2悬臂倾角标定
由于受到吊丝负载、悬臂加工精度以及安装误差的影响,导致悬臂出现倾斜,悬臂的倾角主要与悬臂当前位置和力臂有关,标定过程主要针对这两个因素进行标定。
由于悬臂倾角和悬臂位置以及力臂之间是非线性关系,所以标定过程中在不同位置和力臂下测量多组数据,利用最小二乘法分别进行多项式拟合,便可以得到倾角与力臂以及悬臂位置的关系,在系统的实际工作过程中力臂以及悬臂位置可以通过编码器获得。
4.3随动系统的测试
测试所用的机械臂的参数如下所示:
关节转速:0.02°/s~0.2°/s;
最大加速度:0.2°/s2;
质量:40 kg.
为了测试随动系统的性能,设计了如下所示的测试方案。
1)标志器下端连接机械臂,旋转吊车至标志器正上方,此时吊车与标志器之间的偏移量为零;
2)控制机械臂模拟实际工作情况下的运动;
3)随动系统开始工作,记录标志器与吊车之间的偏移量,直至测试结束。
测试过程中标志器实际成像如图6所示。

图6 标志器实际成像
左侧的像为原始图像,右侧的像为最小二乘圆拟合的结果。
实际的测试结果如图7所示。
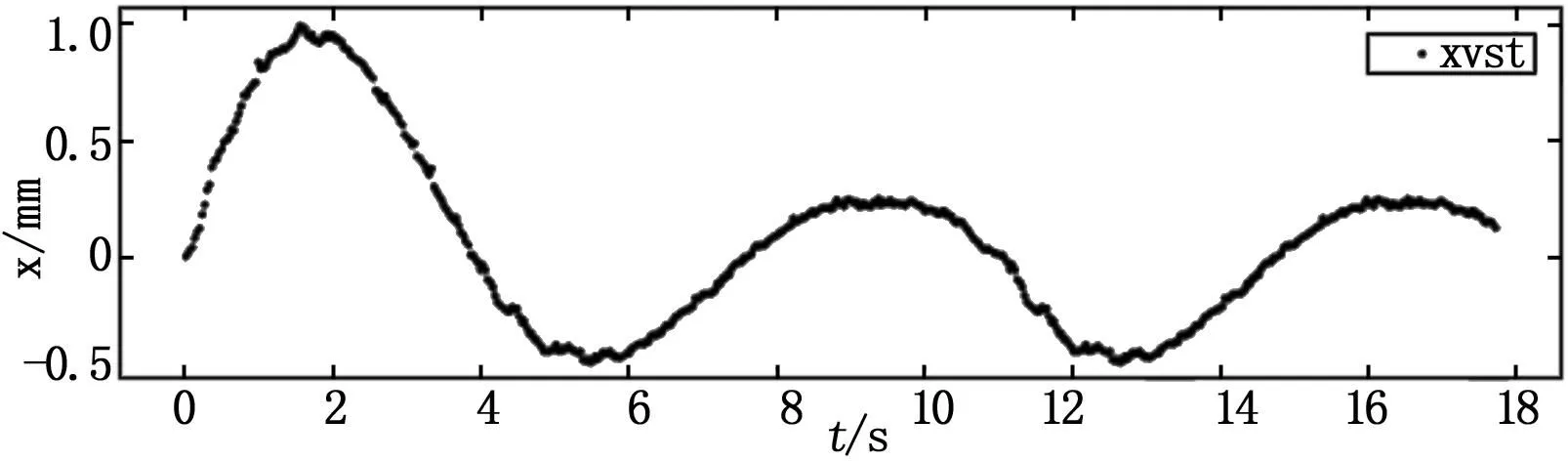
图7 测试结果
图中,纵轴表示吊车与标志器中心点之间的偏差,从图中可以看出吊点相对于标志器前后震荡,开始是振幅较大,最大振幅可以达到1.3 mm随着时间的增长,振幅逐渐减小,大约3 s后,振幅稳定在0.5 mm之内,该误差满足系统设计的精度要求。
5结论
本文从机械臂重力补偿的实际应用出发,针对月球六分之一微重力环境的模拟试验,结合视觉伺服控制的基本原理和方法,设计并实现了一套基于视觉伺服的月球六分之一微重力环境模拟装置,经过试验验证,本系统完成了月球机械臂微重力模拟的基本要求,满足系统的设计指标,为月球机械臂地面模拟试验提供了有力的支持。
参考文献:
[1] 齐乃明, 张文辉, 高九州, 等. 空间微重力环境地面模拟试验方法综述[J]. 航天控制, 2011,29(3):95-100.
[2] 王麟琨, 徐德, 谭民.机器人视觉伺服研究进展[J].机器人, 2004(3):277-282.
[3] 方勇纯. 机器人视觉伺服研究综述[J].智能系统学报, 2008(3):109-113.
[4] 沈晓晶, 潘俊民. 机器人视觉伺服系统控制结构的研究[J]. 工业仪表与自动化装置, 2002(4):9-12.
[5] 宋亚姬. 基于卡尔曼滤波的运动目标检测与跟踪技术研究[D]. 长春:长春理工大学,2012.
[6] 陈良波, 郑亚青. 基于最小二乘法的曲线拟合研究[J]. 无锡职业技术学院学报, 2012:52-55.
[7] 罗文晟. 基于PMAC运动控制器的弧焊机器人控制系统研究[D]. 哈尔滨:哈尔滨工业大学,2009.
Design and Implementation of one-sixth Microgravity Environment Simulator on Moon
Gao Depeng1, Du Qingan2, Wu Rui1
(1.Harbin Institute of Technology, Harbin150000, China;2.Tianjin Aerospace and Electrical Equipment Research Institute, Tianjin300000, China)
Abstract:In order to carry out ground simulation for mechanical arm which will work on moon, a set of suspension one-sixth microgravity simulator with visual servo as the following control system is designed and implemented. In order to satisfy the imaging condition of high precision, wide and large depth of field and high frequency,design a LED light source active light based target marker and a vision measuring system based on multi-sensor fusion of laser range finder and dual camera, presents a method of target recognition and detection based on the target marker. Using the PMAC motion control card as the controller of the actuator,achieve the precise control of motor. After test, the designed system is simple operation, stable running and high microgravity simulation accuracy.
Keywords:microgravity simulation; visual servo; following system
文章编号:1671-4598(2016)02-0137-04
DOI:10.16526/j.cnki.11-4762/tp.2016.02.037
中图分类号:TP391.9
文献标识码:A
作者简介:高德鹏(1988-),男,吉林九台人,硕士,主要从事图像处理、视觉伺服方向的研究。
基金项目:国家自然科学基金(61440025)。
收稿日期:2015-08-25;修回日期:2015-09-25。
