基于机器视觉的工件尺寸和角度的测量
2016-03-17戴知圣钟小芸
戴知圣,潘 晴,钟小芸
(广东工业大学 信息工程学院,广州 510006)
基于机器视觉的工件尺寸和角度的测量
戴知圣,潘晴,钟小芸
(广东工业大学 信息工程学院,广州510006)
摘要:针对一款手机U盘芯片的二维尺寸的测量问题,提出运用图像处理的方法,实现手机U盘芯片长度和偏角的非接触式测量;通过COMS工业相机采集到U盘芯片的背光图像,在边缘检测的基础上,用Hough变换检测和定位U盘芯片边缘直线;针对在一条边上Hough变换对应检测到多条直线的情况,提出采用直线参数平均法拟合边缘直线,从而获得较精准的边缘位置;通过对已知尺寸的标准块进行相机标定,由此计算出精确的U盘芯片的尺寸和倾斜角度;实验表明:该算法能够满足工程上较高精度的检测要求。
关键词:U盘芯片;二维尺寸;非接触式测量;Hough变换
0引言
随着智能手机的迅速普及,手机已超过笔记本电脑成为最重要的移动数码终端设备。大量数据内容的不断增加,手机U盘的出现极大地方便了手机和电脑之间的数据共享。目前大多数厂家进行U盘机芯尺寸测量主要是通过游标卡尺或者千分尺进行人工检测。人工检测存在效率低、可靠性差、易因工人疲劳而产生误检等弊端,难以满足现在制造业强调的实时、快速、在线和非接触检测的特殊要求[1],而基于机器视觉的检测方法[2-6]弥补了人工检测的所有缺陷。
本文针对一款手机U盘芯片二维尺寸和倾斜角度的检测问题,提出利用机器视觉方法实现U盘芯片非接触式测量。通过采集到的U盘芯片的背光图像,经过一系列图像预处理后,利用Hough变换[7-9]检测U盘轮廓上的边缘直线。针对在一条边上Hough变换对应检测到多条直线的情况,本文提出采用直线参数平均法拟合边缘直线,从而获得较精准的边缘位置。通过提取特定的直线以及相交后求出的关键点的坐标,计算出芯片在图像上的尺寸和偏角,最后通过相机标定计算出芯片的实际尺寸。
1光学检测系统组成
本文设计的光学检测系统(AOI)由图像采集设备、光源、PC机以及图像处理软件构成。图像采集设备是由500万像素的CMOS工业相机和25 mm的定焦镜头组成。手机U盘芯片如图1所示,本文实验光源采用的是LED背光光源,在背光方式下,光源均匀的从被检测物体的背面射出,可以获得高清晰的轮廓,照射效果如图2所示。相机采集到的图像通过USB接口传输给计算机,利用软件对图像进行处理并识别被测U盘芯片是否合格。

图1 U盘芯片原图 图2 U盘芯片背光图
2检测原理及算法流程
检测的目标是检测U盘的最大长度和竖直方向两条边的夹角,如图3所示,即计算AD边到BC边的最大距离以及AB边与CD边的夹角。因此,需要提取A、B、C、D 4个点在图像中的坐标以及求得直线AB与CD的夹角。
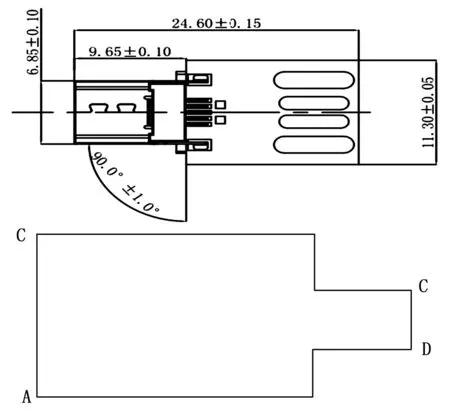
图3 U盘芯片二维结构图
本文提出的算法主要分为五部分:图像预处理、边缘直线检测、直线拟合、尺寸和角度的计算以及相机的标定。
2.1图像预处理
预处理是通过对相机采集到的图像进行灰度化、边缘检测、膨胀处理以及区域填充,最后再做一次边缘检测等一系列操作,如图4所示。本文采用Canny算子进行边缘检测,提取的边缘较完整,边缘线连接程度好,定位较为精准,效果如图5所示。

图4 图像预处理流程图
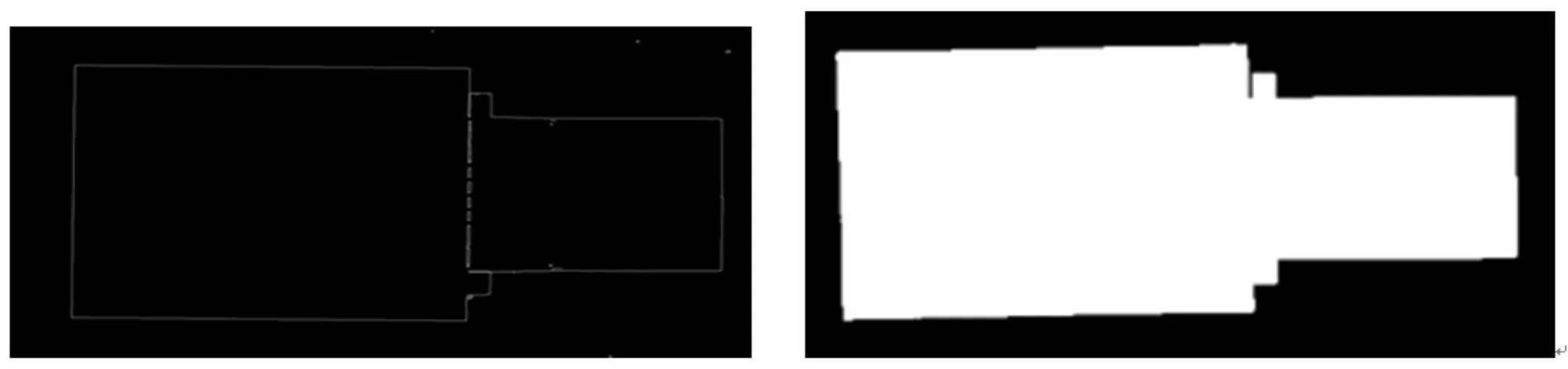
图5 第一次Canny边缘检测图 图6 填充效果图
由于U盘芯片中部的拼接部分存在一定的间隙,在背光照射下会漏光,这对竖直方向边缘的直线检测造成很大干扰,还可能检测不出最短的那条边的直线。因此在边缘检测的基础上做一次区域填充处理,将U盘边缘内部全部填充为白色,如图6所示。但是由于边缘检测检测后的边缘存在不连续性,这就不能保证检测的外轮廓为封闭曲线,如果外边缘不封闭,则不能填充成功。因此,在填充之前需要对边缘检测的图像进行一次形态学膨胀处理,膨胀效果如图7所示。由于需要提取边缘的直线,Hough变换是基于边缘图像的基础上进行直线检测的,因此需要在填充图像上再做一次边缘检测,检测效果如图8所示。

图7 膨胀处理图 图8 第二次边缘检测图
2.2边缘直线检测
本文采用Hough变换的方法提取U盘边缘直线。由于Hough变换是通过在参数空间累加器进行累计投票来决定图像空间中的直线参数,加上图像空间和参数空间的离散化误差、边缘检测误差、图像噪声等因素影响,累加器矩阵中的每个单元的累加值可能来源于真实共线的点,也可能来源于图像中的噪声点。当算法里的步距角slop(θ)选择过小时,会造成一条直边上检测出多条直线的情况;步距角选择稍大则导致直线定位不准确;此外,参数空间累加器只记录共线点数而没有记录点的位置关系,从而无法确定被测直线段的起点和终点。
针对一条直边Hough变换检测出多条直线,文献[10-11]提出用弗里曼链码法初步提取直线,去除部分不在直线上的点。在噪声较多的情况下,该算法相对标准Hough变换算法可以提高计算速度。但在噪声较少的情况下效果不明显。
本文提出采用直线平均法做直线拟合,即将一条直边上检测出来的多条直线拟合成一条直线。虽然Hough变换不能定位被测线段的端点,但可以通过参数空间提取的直线对应的ρ和(值根据下面公式[12]来计算出直线上的两个点pt1和pt2。

(1)
(2)
(3)
(4)
(5)
(6)
通过Hough变换检测出U盘芯片轮廓的6条边上的直线,分别提取属于竖直边AB、CD上的直线束,以及最长边mn和ef上的直线,如图9所示。由于Hough变换容易在一条边上检测出多条直线,AB和CD两条边的直线的是否准确关系到U盘偏角的检测结果,因此本文提出对在AB和CD上的直线进行直线拟合,对mn和ef上的直线分别只取共线点数最多的一条。
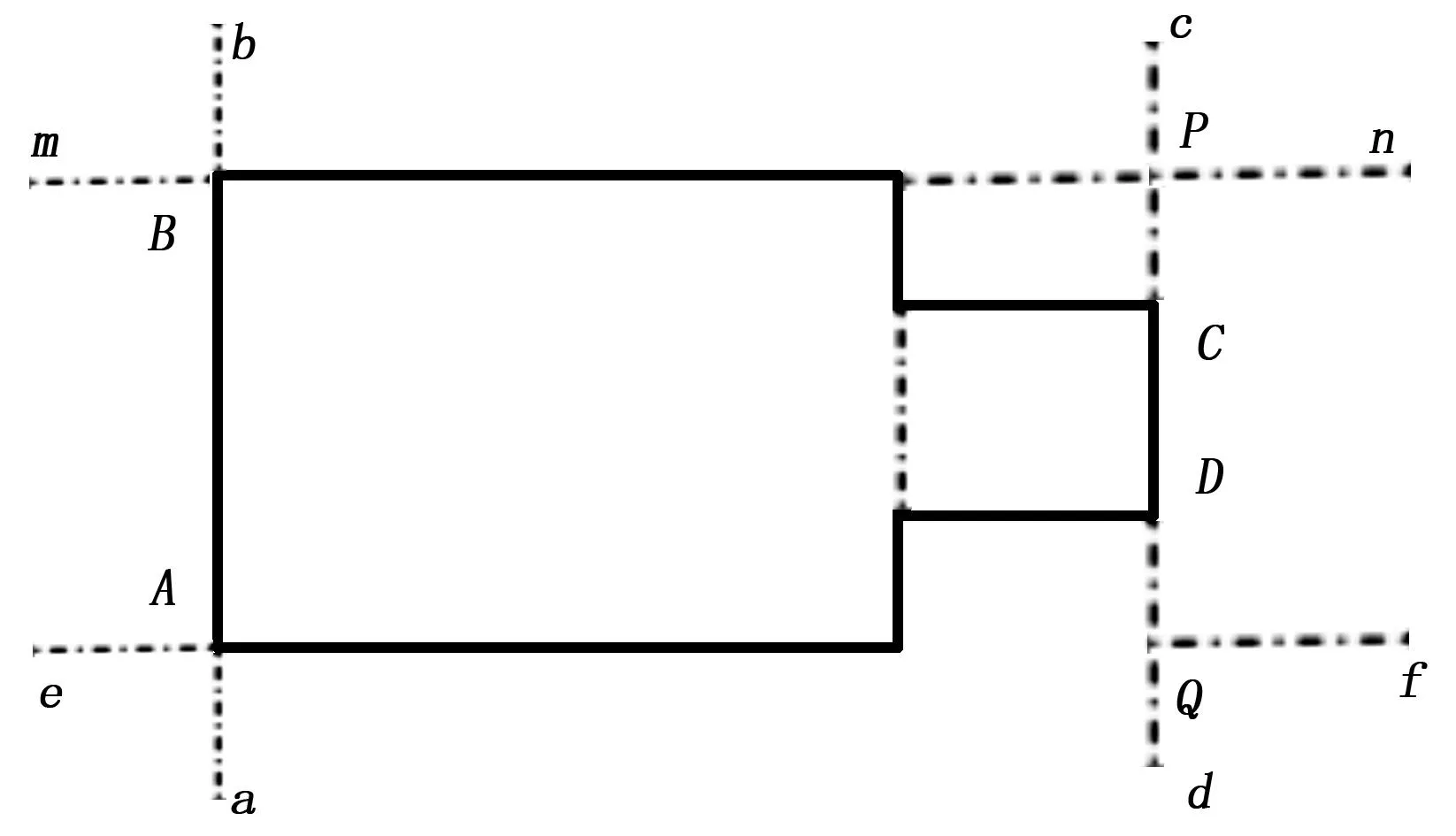
图9 U盘芯片平面图
图12 未拟合的多条局部图 图13 直线拟合局部图直线
2.3竖直方向边上的直线拟合
为了保证U盘芯片偏角检测的精度,本文对Hough变换的步距角取0.1°,同时分别只取在AB和CD边上的3~4条共线点最多的直线进行拟合,减少参与拟合的直线数量,使拟合的直线更精准。
具体做法:AB边上直线束所对应的参数ρ和θ分别求平均值,得到新的一条直线的参数ρAB和θAB,同理得到CD边上的新直线参数ρCD和θCD。
未拟合前AB和CD边上检测出多条直线,如图10所示,局部放大如图11所示;拟合后用蓝色线画出,水平方向两条用最长直线画出,拟合效果如图12所示,局部放大效果如图13所示。
2.4计算U盘芯片的最大像素长度和角度
两条不平行直线相交,有且只有一个交点。通过拟合后的直线AB和CD分别与直线mn和ef相交,可以计算出A、B、P、Q四点在图像上的坐标,但不能求出C、D两点的坐标。通过A(x1,y1)、B(x2,y2)、P(x3,y3)3点坐标可以求出P点到直线AB的距离distance1。
distance1=



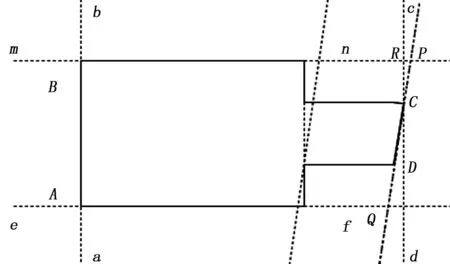
图14 U盘芯片偏角图
2.5相机标定
上文求出的是U盘图像中的最大尺寸像素距离,要求得实际尺寸,还需要知道相机在固定焦距下图像中每个像元的实际尺寸。
本文采用的方法是用一个标准尺寸的矩形标定块对相机进行标定,标定块长度为15.00 mm,竖直边夹角为0°,该标准块的尺寸误差不超过1 μm。当检测到标准块的Angle为0°时,Distance数据才有效,则记录该数据为Test_distance,单位为像素个数。本文采用的CMOS相机的分辨率2592×1944,通过式子:

3实验结果及其分析
本文测试这款U盘在设计上的标准长度为24.60 mm,偏角为0°。如果被测U盘的长度大于24.70 mm或偏角大于1°则判为不良品。
随机挑选了一个测试样品,经千分尺测出该U盘芯片的实际长度为24.64 mm,在日本的基恩士光学检测仪上测出该芯片的夹角为0.70°。
采用本文设计的直线拟合算法与未拟合算法分别对该U盘芯片进行了1 030次重复测试实验,每次测试芯片在视野中放的位置不同,分别对测量的尺寸和角度的均值、最大误差和标准差3个指标进行对比,对比结果如表1所示。
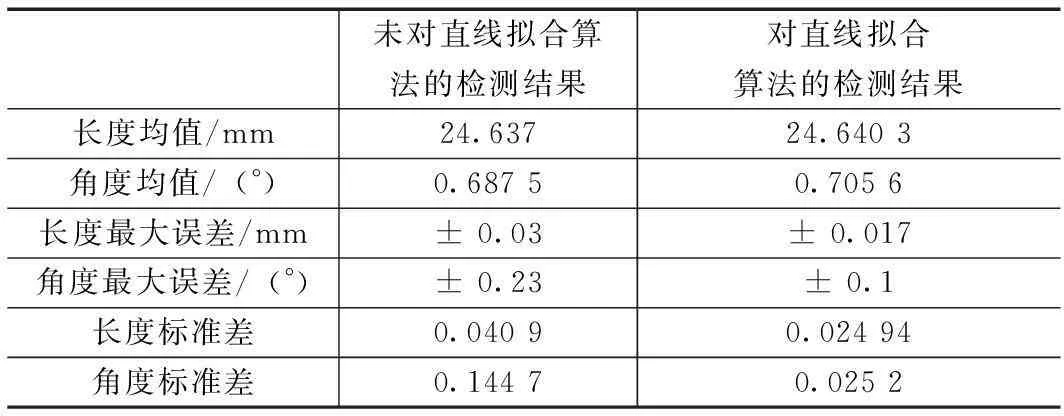
表1 直线拟合与未拟合的算法测试对比
通过以上数据表明:直线拟合算法比未拟合算法具有更好的鲁棒性,计算误差更小。在不同位置测出的数据不同主要是因为镜头的细微畸变所致,还有图像的量化误差也会对每次的检测结果数据有一定影响。可以更换质量更好的镜头来改善检测数据的精度,同时为了减小图像畸变效应,检测时尽量将工件放置在相机视野的正中央。
对已知缺陷类型的800个样品进行检测,其中253个为合格品,即尺寸或角度在误差范围内;547个为次品,次品中200个为尺寸不合格,250个为角度不合格,97个为尺寸和角度都不合格。检测结果如表2所示。
4结束语
本文设计了一套检测手机U盘芯片二维尺寸和角度的光学检测算法,对U盘芯片边缘的直线进行拟合的算法改进。通过对比直线拟合与未拟合的实验数据,证明本文设计的算法具有较高的稳定性和准确性,可以满足生产检测的要求。此外,对另外两款形状相同、长度不同的手机U盘芯片进行抽

表2 800个样品的检测结果统计表
注:总体准确率为95.25%,检测结果——“不正确”表示误检情况,“正确”表示检测结果与实际相符。
样测量,实验数据与真实尺寸很吻合,证明本文的光学检测算法在检测类似形状的工件方面具有一定的通用性。
参考文献:
[1] 单桂军,胡伟. 一种基于CCD的非接触尺寸测量系统[J].电视技术, 2013, 37(15):41-43.
[2] 常春国,徐运涛. 应用机器视觉精确检测工件尺寸的研究[J].电子质量, 2008(2):1-4.
[3] 赵永涛,贾培刚,姜冰清.基于CCD的机械零件尺寸测量研究[J]. 机电产品开发与创新, 2009,22(6):138-140.
[4] 黄品松,徐杜,蒋永平,等. 零件尺寸图像检测数据处理与高精度检测方法[J].计算机系统应用, 2011,20(9):248-251.
[5] 马艳娥,张波涛,高磊,等. 基于图像处理的零件尺寸测量研究[J]. 电子与测试, 2011(8):39-41,95.
[6] 田原嫘, 黄合成, 谭庆昌,等. 基于机器视觉的零件尺寸测量[J]. 激光与光电子学进展, 2010, 47(1):82-90.
[7] 陈盖凯. 基于Hough变换的直线检测[J]. 西安航空技术高等专科学校学报, 2007,25(3):34-36.
[8] 朱芳芳, 顾宏斌, 孙瑾. 一种改进的Hough变换直线检测算法[J]. 计算机技术与发展, 2009(19):19-22.
[9] Wang J, Zhu Q, Wang W, et al. Straight line extraction algorithm by Hough transform combining edge grouping[J]. Journal of Remote Sensing, 2014,18(02):378-383.
[10] 杨顺辽. 基于Hough变换提取直线的改进方法研究[J]. 电脑与信息技术, 2006,14(5):29-31.
[11] 赵洪亮. 基于Hough变换改进的直线检测与定位[J]. 激 光与红外, 2009,39(9):1009-1011.
[12] Gary Brad-ski&ADRIAN Kaehler.Learning OpenCv [M]. American:O’Reilly Media,Inc.2008.
Workpiece Size and Angle Measurement Based on Machine Vision
Dai Zhisheng, Pan Qing, Zhong Xiaoyun
(School of Information Engineering,Guangdong University of Technology, Guangzhou510006,China)
Abstract:In this paper, for two dimensional size and angle of mobile U disk, an image processing methods was presented.It realized a non-contact measurement of the length and angle on mobile U-disk. Based on edge detection, it adopted Hough transformation to detect and locate the straight edge line of Usb chip through the backlighting image of Usb chip photographed by the COMS industrial camera.In the case that Hough transformation might detect to multiple straight lines on one straight edge.The method of linear parameter on average to fit the edge of a straight line was presented. so as to obtain accurate edge positions. Through the known size block for camera calibration, we can calculate the exact size and the angle of inclination of the Usb chip.The experimental results show that this algorithm can meet the detection requirements for higher accuracy in engineering.
Keywords:U-disk chip;two dimensional size; non-contact measurement; Hough transformation
文章编号:1671-4598(2016)02-0027-03
DOI:10.16526/j.cnki.11-4762/tp.2016.02.007
中图分类号:TP391.41
文献标识码:A
作者简介:戴知圣(1988-),男,江西吉安人,硕士研究生,主要从事图像处理、机器视觉方向的研究。
基金项目:国家自然科学基金(61001179)。
收稿日期:2015-07-11;修回日期:2015-10-15。
潘晴(1975-),男,湖北武汉人,副教授,主要从事图像处理、模式识别方向的研究。
