针对定向通信类目标的无人机搜索策略研究
2016-03-16袁博,杨军
袁 博,杨 军
(西北工业大学 航天学院,西安710072)
针对定向通信类目标的无人机搜索策略研究
袁 博,杨 军
(西北工业大学 航天学院,西安710072)
目标搜索策略的研究可分为两大类:一类是航路规划层面的航路搜索策略;另一类是导引头层面的导引头搜索策略。在航路规划层面进行定向通信类目标的搜索策略研究,提出了改进的螺旋搜索航路。与目前大多数文献不同的是,在搜索航路规划时考虑了通信类目标的特点,并且在搜索航路规划的基础上,基于虚拟目标理论进一步完成了搜索制导律的设计,以使无人机按照设计的航路飞行,并在航路存在误差时保证导引头指向理论轨迹上的虚拟目标,从而提高目标截获概率。最后基于质点模型验证了搜索制导律的可行性,表明提出的搜索航路及制导律具有一定的理论价值与工程参考价值。
目标搜索策略;无人机;虚拟目标;搜索制导律
0 引言
对于飞航式导弹或无人机来说,通常需要射后截获目标,即在飞行一段时间后进行目标的截获,同时由于测量误差或运动信息估算算法误差等原因,很难在理论目标点处截获目标,因此需要引入目标搜索策略。目前已经有很多针对目标搜索策略的研究,可分为两大类:一类是航路规划层面的航路搜索策略,常见的搜索航路有光栅式、螺旋式和扫雪式;另一类是导引头层面的导引头搜索策略,例如均匀“一”字型扫描、单向“一”字型扫描、步进凝视扫描等。
本文准备在航路规划层面进行定向通信类目标的搜索策略研究。与目前大多数文献不同的是,在搜索航路规划时考虑了通信类目标的特点,并且在搜索航路规划的基础上,基于虚拟目标理论进一步完成了搜索制导律的设计,以使无人机能够按照设计的航路飞行。
1 搜索航路规划
1.1 定向通信类目标特点分析及航路形状设计
通信目标的天线可分为全向通信天线和定向通信天线,对采用定向通信天线的目标,由于其主瓣集中在某一个扇区,甚至成笔状波束,导致导引头难以截获其主瓣,尤其是在初始搜索段,因此可认为对这类目标主要是采用副瓣截获,导引头探测距离较近。
由于导引头对这类目标的探测距离较近,因此不仅要求导引头指向目标,而且要求无人机飞至目标附近,以保证无人机与目标相对距离足够近,满足导引头距离截获要求。也就是说,搜索航路不仅要保证导引头在方向上覆盖整个搜索区域,还要求无人机飞行轨迹覆盖整个搜索区域。
目前常用的搜索航路包括光栅式、螺旋式和扫雪式,其他更多的搜索路线都可以分解成为以上三种模式。这三种模式都是由直线搜索段和转弯段组成,通过建构,它们可以确保无人机导引头探测区域覆盖整个搜索区域,并且没有两个直线段相交。
分析这几种搜索航路的特点,可看出螺旋式搜索航路能同时满足方向型搜索需求和位置型搜索需求,因为螺旋式搜索在完成无人机航迹覆盖整个搜索区域的同时,航迹的螺旋形又保证了导引头方向上扫过360°。另外,如果采用由内向外螺旋搜索的话,首先最内圈的搜索能最快速地完成方向型搜索,如截获目标,则转入正常攻击;如没有截获目标,则继续进行螺旋搜索,自然而然地进行位置型搜索。
综上所述,初步拟定采用由内向外的螺旋式搜索航路,具体设计如下。
1.2 螺旋式搜索航路设计
考虑到在真实飞行过程中,无人机总是朝着目标最大可能出现概率的方向飞去,因此即使没有在预定区域发现目标,目标一般也是越靠近预定区域出现的概率越大,基于这个考虑,给出搜索航路如图1所示。
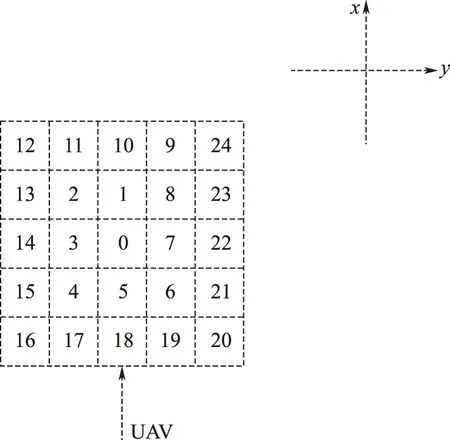
图1 搜索航路示意图Fig.1 Sketch map of searching path
图1为沿地面系z轴的俯视图,0~24编号的搜索单元表示搜索区域,其中搜索单元0表示无人机最初判断的目标出现区域,这个飞行过程描述如下:
首先无人机按照最初判断的目标出现区域由搜索单元18进入,沿x轴方向飞行并搜索目标,当搜索至预定目标区域(即搜索单元0)时,如发现目标,则进入末制导攻击段,如没发现目标,则转入搜索飞行段;
考虑到一般情况下,目标在预定区域附近出现的概率大于远离预定区域出现的概率,同时假定无人机在接到其他命令前一直进行搜索,直至发现目标完成搜索为止,因此搜索线路同时应能循环进行,路线设计为:搜索单元0→搜索单元1→搜索单元2→搜索单元4→搜索单元6→搜索单元9→搜索单元12→搜索单元16→搜索单元20→搜索单元24→搜索单元12→搜索单元15→搜索单元5→搜索单元0。按这个路线,无人机可以反复搜索,直至发现目标。
1.3 搜索单元大小的确定
上面的设计将整个搜索区域划分为若干搜索单元,这里在假定导引头定轴搜索的前提下,研究搜索单元大小的确定方法。
导引头每个单元的宽度w为雷达导引头探测宽度,搜索视场如图2所示。

图2 搜索视场示意图Fig.2 Sketch map of searching area
D为导引头的最大识别距离,H为平飞高度,M为地面视场纵深,导引头瞬时视场为-a~+a,如图3所示。
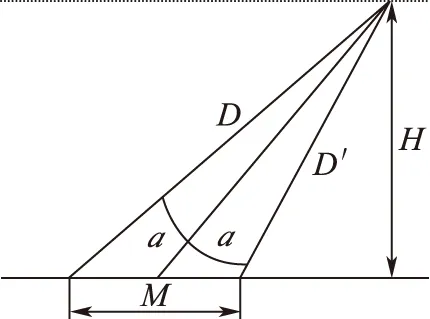
图3 纵深搜索视场示意图Fig.3 Sketch map of searching area in depth
结合图2和图3,可近似计算得:
H=D·sin(φεs-a)
M=H·tan-1(φεs-a)-H·tan-1(φεs+a)
式中,φεs为导引头采用定轴搜索时的框架角。
2 搜索制导律设计
完成了搜索航路的设计后,还需设计相应的制导律,以控制无人机按照预定航路飞行。本文提出一种结合虚拟目标的搜索制导律,总的思路是无人机自身在纵向保持定高平飞,在航向采用基于航迹方位角指令的指令跟踪制导律,以实现按照搜索航路飞行的目的。而虚拟目标采用与无人机相同的航迹方位角指令和速度运动,只是初始位置为目标预计位置,这样可以获得每一时刻目标的坐标位置,从而计算出每一时刻导引头的光轴指向,引导导引头指向虚拟目标,从而提高导引头的目标搜索概率,降低无人机搜索航迹跟踪误差带来的影响。下面分别介绍无人机指令制导律和虚拟目标运动规律的设计。
2.1 制导律设计
航向制导律拟采用基于航迹方位角的指令跟踪制导律,近似实现形式如下:
χc=f(l)
式中,l—以初始位置为原点,无人机沿搜索路径走过的路程;
Vcon—无人机巡航速度;
t0—进入搜索段的时刻;
t—无人机飞行时间;
f(l)—无人机航迹方位角指令随路程变化的函数。
2.2 虚拟目标运动规律设计
根据第三方测量或被动定位获得的目标预计位置作为虚拟目标的初始位置,记为(xT0,yT0),虚拟目标从初始位置沿着搜索航路移动,具体运动规律如下:
χcT=g(lT)
xT=xT0+vcosχcT
yT=yT0-VsinχcT
式中,lT—以初始位置为原点,虚拟目标沿搜索路径走过的路程;
l0—虚拟目标相对无人机的路程提前量,这里l0=xT0;
t0—进入搜索段的时刻;
t—无人机飞行时间;
g(lT)——虚拟目标航迹方位角指令随路程变化的函数。
至此,就完成了无人机搜索航路的设计。
3 仿真分析
本文基于无人机水平面内的制导系统简化模型进行目标搜索策略仿真分析。
3.1 仿真条件
无人机在1000m高空进行定高目标搜索,初始位置(0,0)m,初始速度60m/s,导引头预定俯仰框架角-45°,方位框架角为0°(当采用虚拟目标法时,不限制框架角)偏航通道飞控驾驶仪一阶等效时间常数取0.8s,侧向过载限幅取±2g。制导律系数为kp=0.5,kd=1;目标预计位置坐标为(1000,0)m。
3.2 仿真结果及分析
给定规划的搜索航路如图4所示。
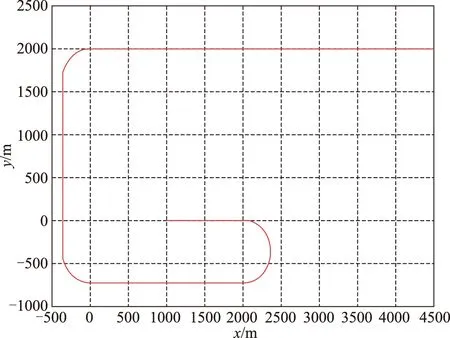
图4 搜索航路曲线Fig.4 Curve of searching path
根据上面的仿真条件,基于无人机制导系统简化模型,可得主要仿真曲线如图5~图7所示。
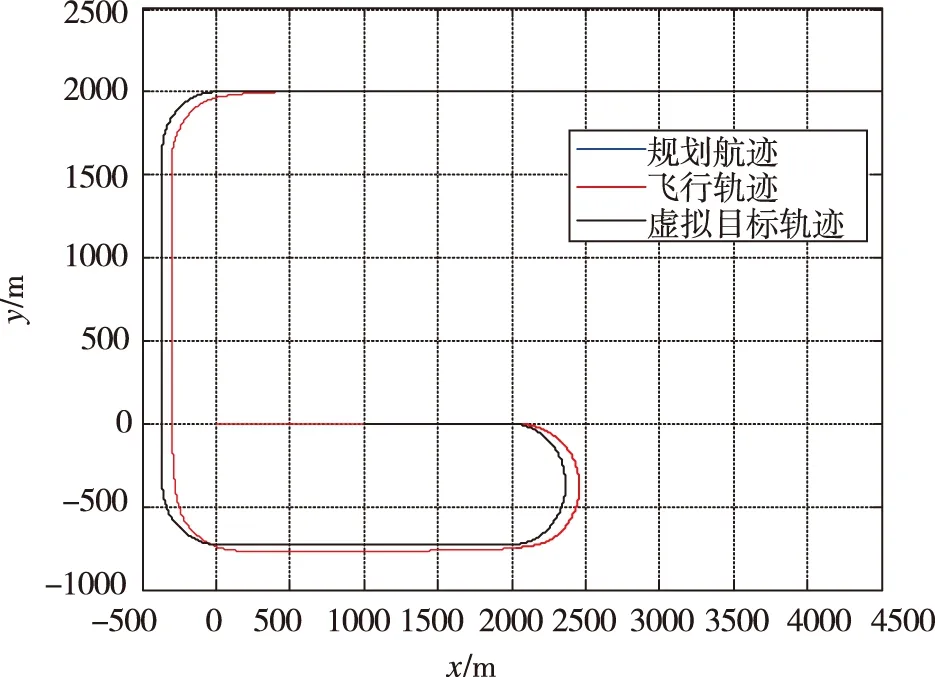
图5 无人机飞行轨迹曲线Fig.5 Curve of UAV flight path
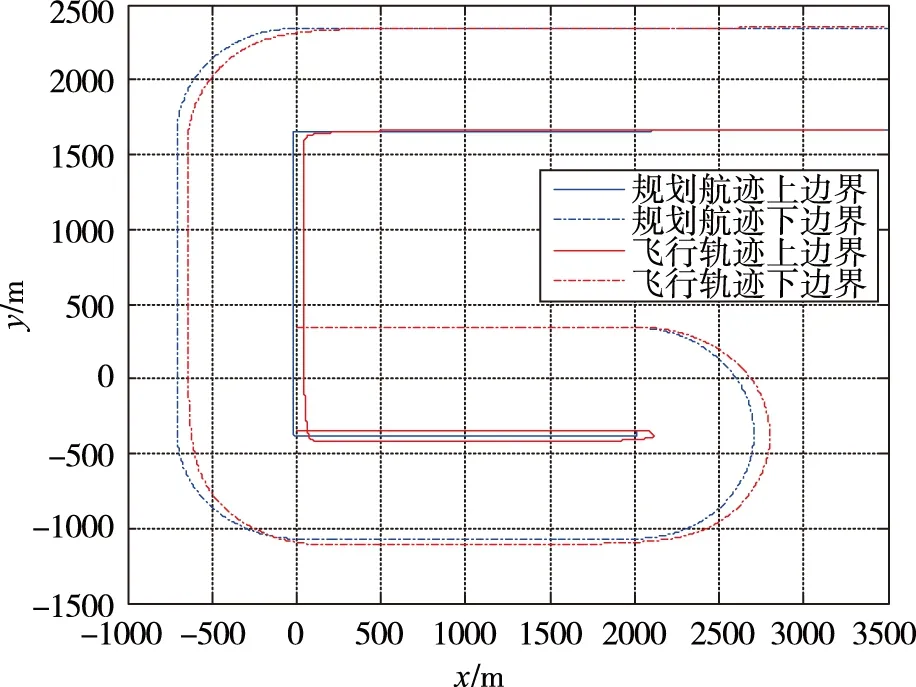
图6 传统方法的搜索区域曲线Fig.6 Curve of searching area with typical method
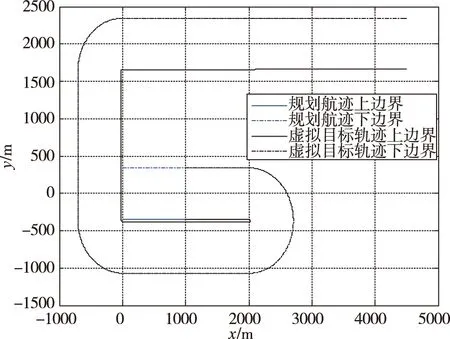
图7 虚拟目标方法的搜索区域曲线Fig.7 Curve of searching area with virtual target method
由图5可以看出,设计的搜索制导律可以较好的实现预计的搜索航路,同时存在一定跟踪误差;由图6中规划航路对应搜索区域与实际航路对应搜索区域的对比可以看出,当采用传统定轴搜索方法时,实际搜索区域与理想搜索区域存在差异,这是由于航路跟踪误差带来的;由图7可以看出,采用虚拟目标方法引导导引头搜索后,实际搜索区域与理想搜索区域吻合。这充分证明了虚拟目标方法可以有效减小航路跟踪误差对搜索区域的影响,当然,本文中没有考虑导引头本身的指向控制动态特性和误差,因此实际搜索区域与理想搜索区域完全吻合,考虑导引头指向控制特性后,效果会有所下降。
4 结论
通过本文研究,得到以下主要结论:
1)采用改进的螺旋搜索航路能够适应定向通信类目标的特点,同时满足方向搜索和位置搜索的需要;
2)基于空间质点模型的仿真证明了采用指令跟踪制导律并结合虚拟目标理论,可以实现螺旋搜索航路,并使导引头光轴指向理论搜索航路上的虚拟目标,这样能减小航路控制误差带来的影响。
当然,以上结论是在简化模型基础上得到的,要进一步应用到工程上,需要在更详细的模型上进行更深入的研究。
[1] 胡中华,赵敏,姚敏,撒鹏飞.无人机航迹规划技术研究及发展趋势[J].航空电子技术,2009,40(2):24-29.
[2] 沈延航,周洲,王雪.攻击型无人机巡弋搜索航路优化设计与仿真[J].火力与指挥控制,2005,12(5):7-9.
[3] 张鹏飞,朱鸿翔,王萧.几种扫描搜索规律的对比研究[J].弹箭与制导学报,2005,25(2):45-47.
[4] 郑宏捷.无人机区域侦察航路规划研究[D].国防科学技术大学,2011.
[5] 谭雁英,赵荣椿,祝小平,张波.一种自主飞行无人机搜索目标的导航控制策略[J].西北工业大学学报,2007,25(6):824-828.
Research of UAV Searching Strategy for the Oriented Communication Target
YUAN Bo,YANG Jun
(College of Astronautics,Northwestern Polytechnical University,Xi’an 710072,China)
The study of searching target strategy can be divided into two main directions:the first one is the aero-path searching strategy in planning path study and the other is the seeker’s searching strategy in the ways of seeker.This paper is studying the searching strategy of the oriented communication target in aero-path planning research,and giving a improved spiral searching method.Differently,we consider the characteristic of communication target when planed searching aero-path.And based on the planning of searching path,we design a searching guidance law which based on the theory of virtual target.That makes the UAV flying in designing path,and make sure the seeker is oriented to the virtual target in theory when it has errors.This makes the UAV has higher probability to catch the target.Finally,we verify the searching guidance law which based on the mass point.And the guidance law and searching aero-path theory has theory’s value and engineering value too.
Searching strategy;UAV;Virtual target;Searching guidance law
2015-05-18;
2015-07-15。
袁博(1980-),男,博士,讲师,主要从事导航制导与控制方面的研究。E-mail:ybstrong@126.com
V249.1
A
2095-8110(2016)02-0033-05
