基于HOG和SVM的级别自适应车型识别算法
2016-03-15吴迪,蔡晓东,华娜等
基于HOG和SVM的级别自适应车型识别算法
引文格式: 吴迪,蔡晓东,华娜,等.基于HOG和SVM的级别自适应车型识别算法[J].桂林电子科技大学学报,2016,36(1):23-28.
吴迪,蔡晓东,华娜,朱利伟,梁奔香
(桂林电子科技大学 信息与通信学院,广西 桂林541004)
摘要:针对现有智能交通系统中视频车辆车型识别方法存在的误检率高、效率低的问题,提出一种基于梯度方向直方图和支持向量机(SVM)的级别自适应车型识别算法。选择大车车头和小车车身的HOG特征作为车辆描述特征,建立一种新的级别自适应模型,以提高检测识别效率;采用SVM训练分类方法,设计了模板匹配策略,构造两类车型分类器,以提升识别准确度。通过标准的交通卡口实验,表明该算法不仅在正常的光照条件下具有较高的识别效率和较低的误检率,而且在不同的光照条件下具有很好的鲁棒性。
关键词:智能交通系统;梯度方向直方图;支持向量机;级别自适应模型;模板匹配
车辆车型识别是智能交通系统的一个重要分支,在公路摄像头监控、高速公路自动收费、车辆流量统计等方面具有广阔的应用发展前景,但存在一些问题迫切需要解决。1)车辆车型识别过程主要包括前景分割、目标检测、特征提取、车型分类4个阶段,由于车辆种类繁多且差别不大,没有明显的区别特征,使得特征提取的过程比较复杂,如何更好地选择特征参数非常重要;2)由于天气、光线等对车型识别准确性的影响很大,如何增加识别的自适应性也是车辆分类有待解决的关键问题。
在实际应用中,特征提取是车型识别的重点和难点,特征参数的选取直接影响识别和分类的速度和准确度。季晨光等[1]提出一种基于Sobel边缘细化提取车型特征的方法,选取车身侧视图的顶长比、顶高比、前后比作为特征参数。王慧斌等[2]提出一种基于PCA-LDA的特征提取结合KNN-SVM分类器的方法,选择车辆的侧面影像作为原始采集数据进行PCA-LDA特征提取。在本研究的标准交通卡口场景中,由于摄像头拍摄角度固定且正对来方车辆,在卡口视频图像序列里无法得到文献[1-2]的目标车辆的侧视图。此外,文学志等[3]采用基于统计模式识别的车型识别方法,提出一种基于类Haar特征和AdaBoost分类器的车辆图像识别算法。文献[4]使用截断的小波系数特征结合SVM进行车辆检测。陈明明[5]基于梯度方向直方图(histogram of oriented gradient,简称HOG)特征和支持向量机(support vector machine,简称SVM)算法对视频中的车辆进行检测。上述方法均在某些方面取得了较好的效果,但各自存在着不足之处。基于AdaBoost的方法在训练样本空间很大时,训练分类器所需时间过长;使用截断的小波系数特征使车辆描述能力不足,识别性能有待进一步提高;而HOG特征[6]结合SVM的方法能应对复杂场景的变化,缺点是需要大量的计算。为此,提出一种基于HOG特征和SVM级别自适应模型的车型识别算法,在正常光照下兼顾识别的速度和准确度,并在光照突变、复杂场景下也具有较高的鲁棒性。
1车辆车型的级别自适应识别算法框架
智能交通视频车辆目标识别所面临的一个重要挑战来自于驶进和远离摄像设备的车辆。对于视频中主要的车辆目标小汽车、客货车,当小车距离摄像头很近时会误检为大车,当大车和摄像头相距较远时会误检为小车。忽略这些极端情况,为使车辆在同一个感兴趣区域(region of interest,简称ROI)都能被识别,选择大车车头和小车车身图像的HOG特征作为描述特征,结合线性SVM全特征训练分类方法进行车辆车型的识别;同时,在HOG特征提取前由帧差法粗略提取目标车辆区域,以建立级别自适应模型,减小计算量,提高了精度。车型的级别自适应识别算法框架如图1所示。
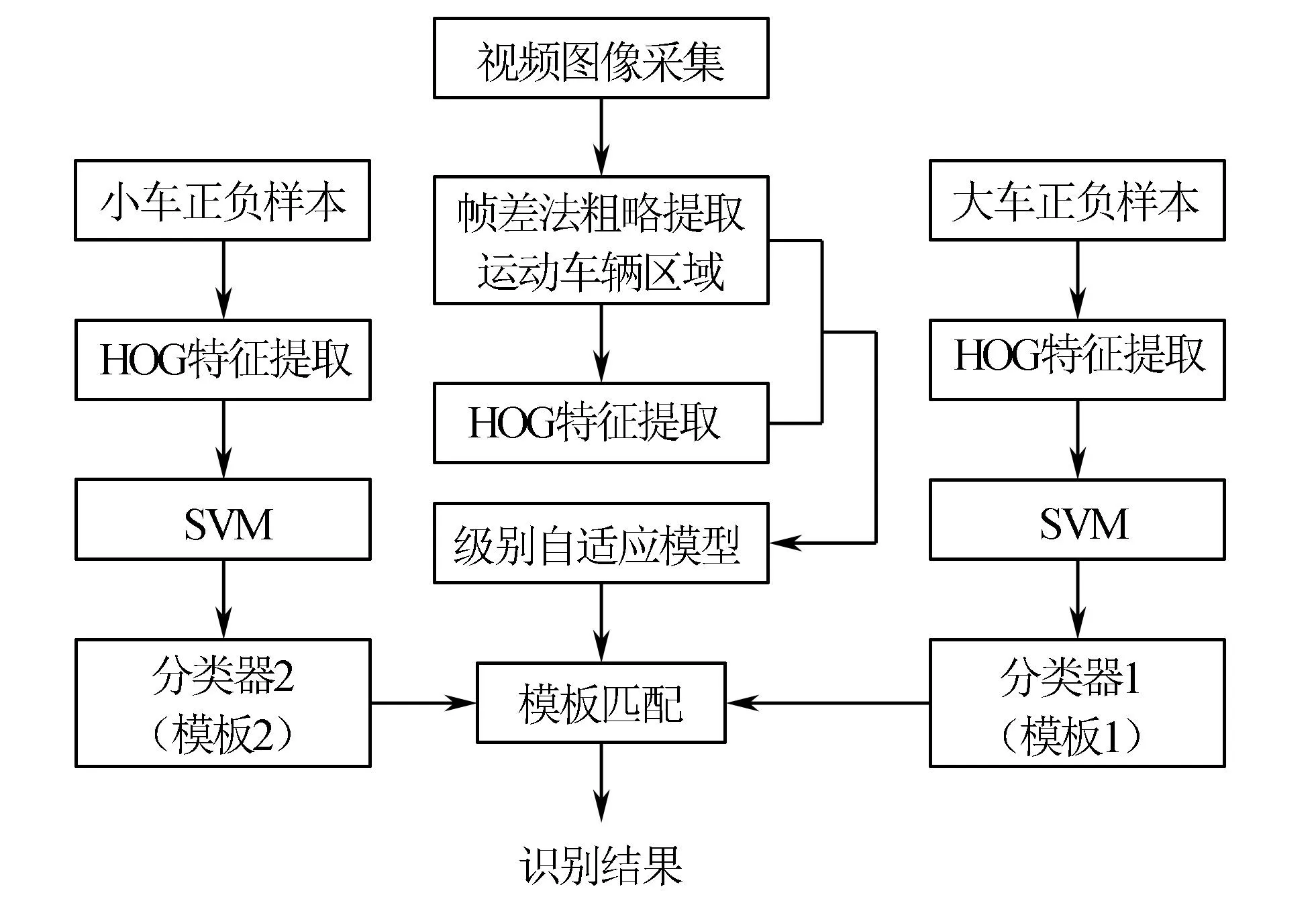
图1 算法框架Fig.1 Algorithm framework
2级别自适应模型的建立
2.1帧差法粗略提取运动车辆区域轮廓
为了在大尺寸复杂环境的视频图像中准确高效地自适应识别目标车辆,车型识别前采用帧差法[7-9],在感兴趣区域粗略提取包含目标车辆的子区域轮廓。帧差法是背景减除法的一种,它的背景就是上一帧图像,速度很快。帧差法基本原理为:
(1)
其中:P(i)和P(i-1)分别为第i帧和i-1帧同一像素点的像素值;T为阈值。
2.2建立级别自适应模型
为了保证目标车辆检测的准确性和完整性,对ROI需进行多次图像缩放,直到待检图像的目标小于模板大小而停止检测,以保证大于模板大小的目标车辆在整个ROI进行缩放后亦能被检测出来。然而,每级缩放都要进行HOG特征的提取。由于HOG特征是在图像的局部方格单元上操作得到高维度的边缘梯度信息,其特征描述子生成速度较慢,每级的缩放需要庞大的计算量,从而导致整个目标车辆检测速度缓慢。为此,提出一种权重满足归一化高斯函数的级别自适应模型(levels adaptive model,简称LAM)。
2.2.1模型建立
LAM由2个部分组成:1)帧差法提取的移动目标车辆高度S1与模板大小M的比值R1;2)检测目标大小S2与模板大小M的比值R2。采用高斯函数作为权值衡量比值的贡献优先级。第i帧图像在R1和R2的影响下,建立缩放级别模型:

(2)

(3)
其中μq1、μq2、δq1、δq2分别为q1和q2的均值和标准方差。
2.2.2模型实现
通过模型的建立,一方面,对每帧图像在指定的ROI进行检测前,通过帧差法粗略提取了移动物体(图2),由比值R1可将图像缩放到模板附近,一般情况下图像缩小,分辨率的降低使得图像的局部特征更加明显,进一步提高了检测的准确度;另一方面,HOG特征提取后的检测目标车辆(图3)由于待检图像已缩放到模板附近,结合比值R2,应用一个小的缩放级别可将目标车辆检测出来,级别缩放次数的减少进一步降低了检测的计算量,提高了检测识别的速度。
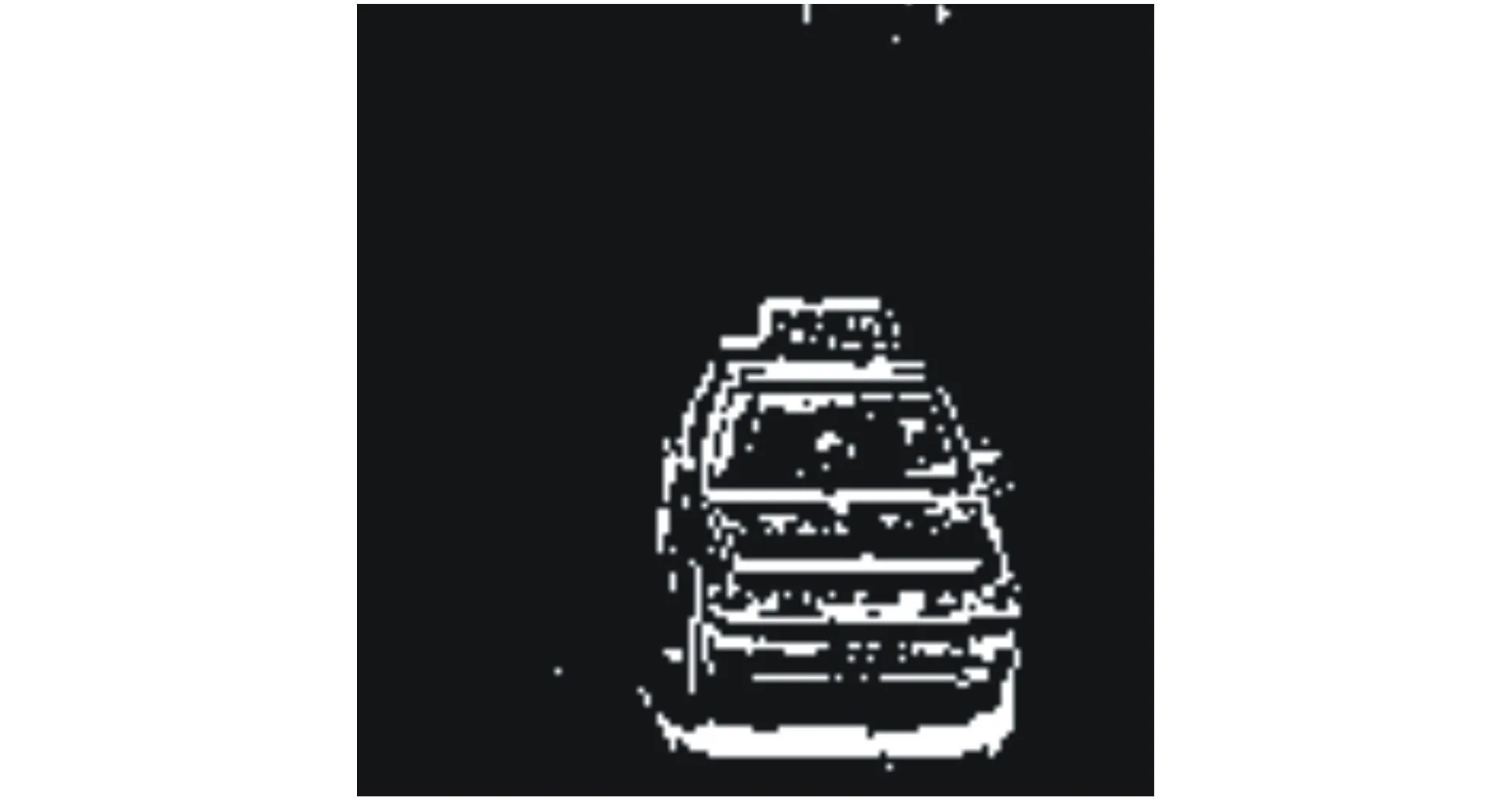
图2 帧差法提取的移动物体Fig.2 Moving object extracted by frame difference method

图3 检测的目标车辆Fig.3 Detection of the target vehicle
3车辆车型的识别
3.1大车车头和小车车身的HOG全特征提取
选取特征的好坏将直接影响后期SVM分类的准确度。为保证同一模板下能够在同一区域检测到大小车辆的特征,提取车辆局部信息显著的多角度大车车头和小车车身图像(图4)的HOG特征对车辆进行描述,即全特征提取。
3.1.1全特征选取的意义
在实际的卡口视频中,经观测发现,场景尺度在小范围变化时,单摄像头在固定角度拍摄的视频图像

图4 车辆图像样本Fig.4 Vehicle image samples
序列中的目标小车车辆的整个车身在视野范围内;目标大车车辆由于拍摄角度的特性,过长的大车车身很难出现在一个视频画面里,而大车车头首先进入视野且特征明显。为此,选择大车车头和小车车身的HOG全特征参数作为SVM分类的特征输入。
3.1.2HOG全特征提取原理
HOG特征主要用于静态图像或视频的行人检测。由于HOG特征表示的边缘梯度信息能很好地应对来自光照、方向、大小等方面的变化而得到了广泛的应用。借鉴文献[6]在行人检测中进行HOG特征提取的思想,采用图5所示的车辆检测窗口进行特征维数的提取。
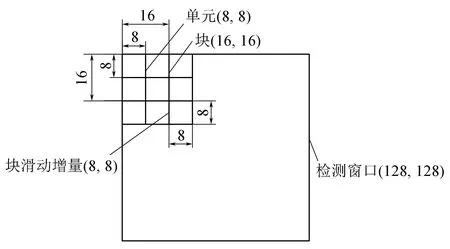
图5 车辆检测窗口Fig.5 Vehicle detection window
如图5所示,对于128×128的检测窗口,每8×8像素构成一个单元,每4个单元构成一个块,块移动增量为8×8,共225个块。单元梯度方向区间如图6所示。每个单元的梯度方向平均划分为9个区间,对所有像素的梯度方向在各个方向区间进行直方图统计,得到一个9维的特征向量,则每个块内有36个特征,总的特征维数为36×225=8100。HOG特征维数描述算子计算的边缘梯度特征信息如图7所示。图中,x轴表示块的个数,y轴表示每一个块的特征数,z轴表示特征值大小。
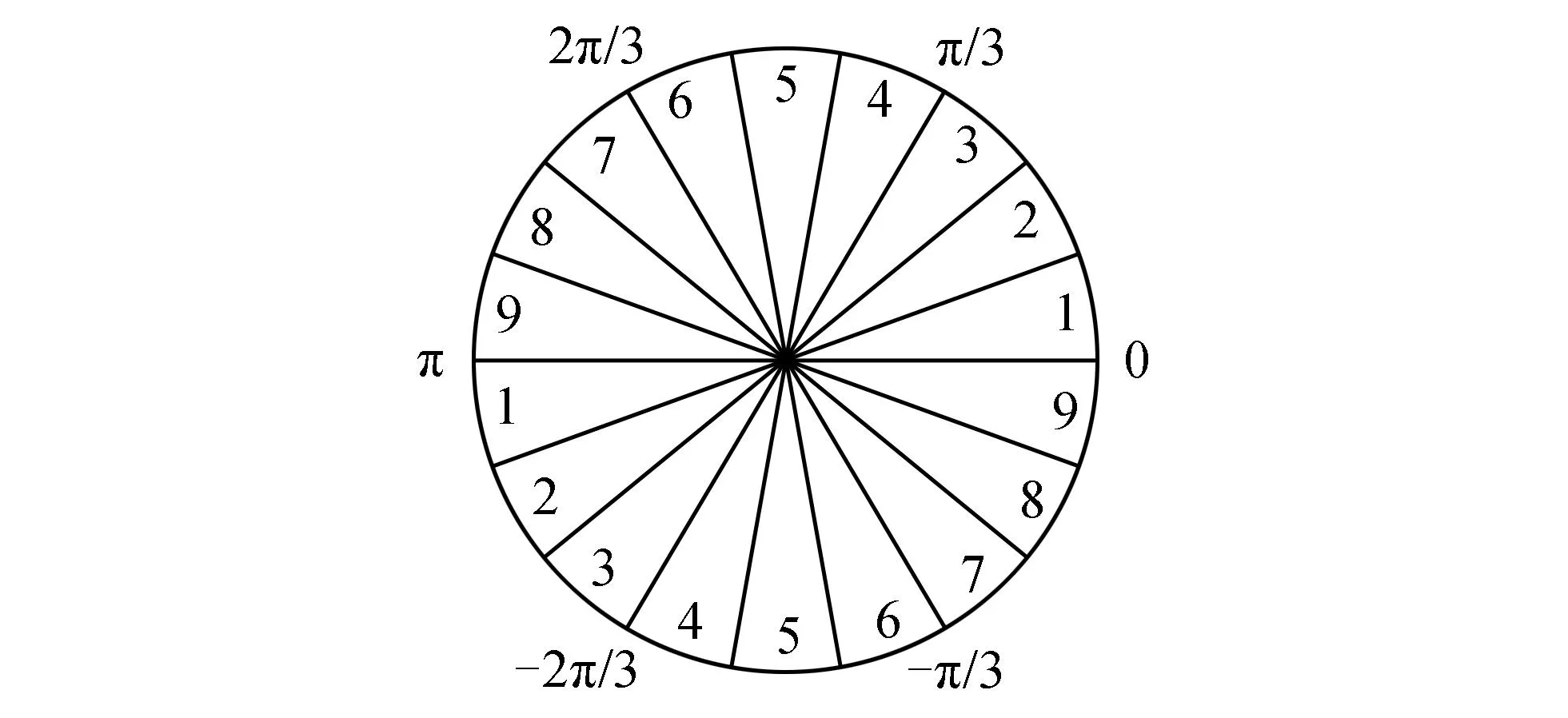
图6 单元梯度方向区间Fig.6 Unit gradient direction interval
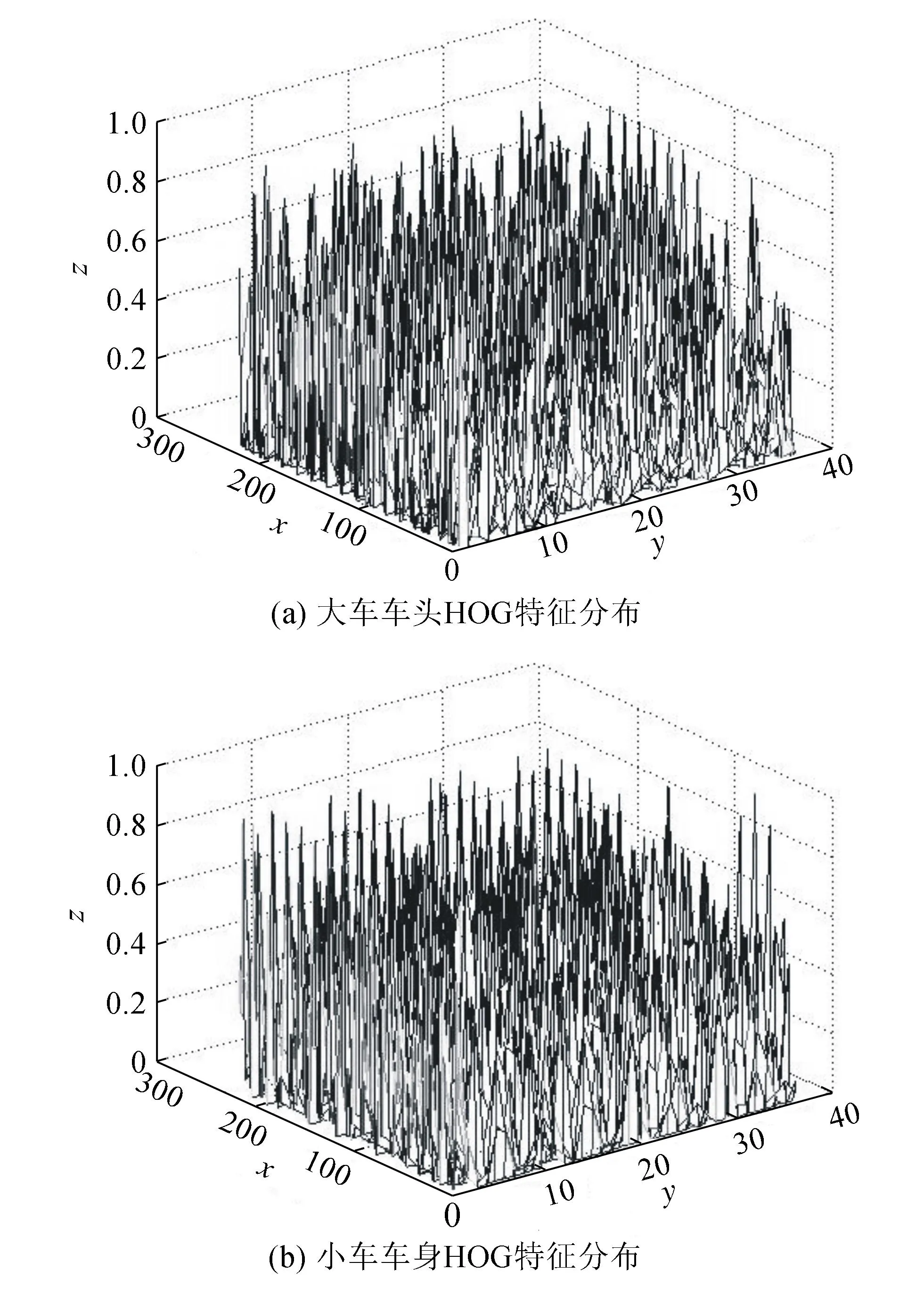
图7 大车车头和小车车身HOG特征信息Fig.7 HOG feature information of front part ofbig car and body of small car
3.2SVM全特征训练分类法
为了满足HOG特征和检测速度的需求,选用线性SVM[10-12]二分类进行HOG全特征的训练分类。SVM是一种基于统计学习理论的机器学习方法,它在解决高维的模式识别中表现出了其特有的优势。对于线性二分类,要找到一个超平面,即线性分类器,使得所有的训练样本都能被正确分类,即满足
(4)
其中,
表示赋予输入数据的类别标签。
由于超平面的非唯一性,可通过二次规划的方法求解最优超平面。
(5)
其中:αi为固定的拉格朗日乘子;w*为最优超平面的法向量;b*为最优超平面的偏移量。
本算法针对交通卡口实际场景,考虑其主要检测的两大类目标车辆,通过SVM对含有正负样本的大型客货车和小汽车分别进行HOG全特征训练,得到2个最优超平面(模板1和模板2)作为图像检测的检测算子。在卡口视频图像序列的ROI对待检窗口进行HOG特征提取后与模板进行匹配,即可进行目标车辆的检测识别。然而,面包车作为一种介于大型客货车和小汽车之间的常见车型,如图8所示,在检测识别过程中被归类为小汽车且产生了漏检。

图8 面包车样本Fig.8 Van sample
面包车与大型客货车在相对摄像头比较远的情况下不易区分,但对于本研究的场景尺度变化小的情况,面包车的车身局部梯度信息与小汽车的车身局部梯度信息吻合而归类为小汽车。为了解决面包车漏检问题,将部分面包车样本作为小汽车的正样本一起进行训练分类后再进行检测。由于样本空间的完善,优化了分类器2,从而使得漏检率明显降低。
4实验过程与结果分析
选择2个标准的交通卡口进行车辆车型的识别实验。对于大车和小车分别创建一个样本库,前者正样本是大车车头图像,后者正样本是小车车身图像,负样本选择与正样本不相关的图像,大小均为128×128。
在HOG特征参数选取阶段,对128×128的图像进行特征统计,共有8100维特征向量。实验结果分2个部分验证:1)在正常光照下直接进行HOG特征提取,结合SVM方法对比本改进算法的识别效率和准确率;2)在不同的光照条件下同一场景本算法的鲁棒性。此外,检测识别的大车和小车分别用虚框和实框标识。
1)正常光照条件下,“北辰南”场景2种算法的检测识别结果对比如图9所示。选取同样的样本集,大车车头正样本1295张,负样本6142张,小车车身正样本1924张,负样本8987张,分别进行原始HOG特征结合SVM算法和本算法的实验,实验结果如表1所示。
从图9和表1可见,对于采集的1280×720视频图像,原始的HOG特征结合SVM算法由于直接对ROI进行HOG特征提取,不仅耗时且误检率较高,本算法是在HOG特征提取前先进行局部目标车辆区域的粗略提取,通过建立级别自适应模型,在模板附近直接进行检测识别,降低计算量的同时提高了识别的准确度。
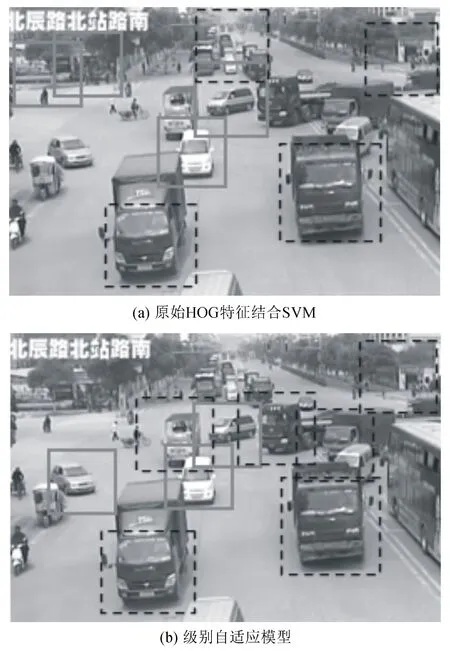
图9 2种算法的检测识别结果Fig.9 Detection and recognition result of two methods

检测识别方法平均用时/(ms·帧-1)识别准确率/%大车小车原始HOG特征结合SVM算法458775.870.0本算法15991.590.3
2)“新兴东门”场景的不同光照条件本算法的鲁棒性效果如图10和表2所示。由于视频是在不同天气情况下拍摄的,雨天或者强光情况下拍摄的视频图像质量与正常光照的相差很大,对算法的要求也就更高。雨天车辆下方阴影区扩大,强光照视频图像的质量不稳定,从而增加了移动物体特征提取和识别的难度。文献[2-3,5]均未涉及特殊天气的车辆检测识别,本算法具有很好的鲁棒性,从而解决了这一难题。
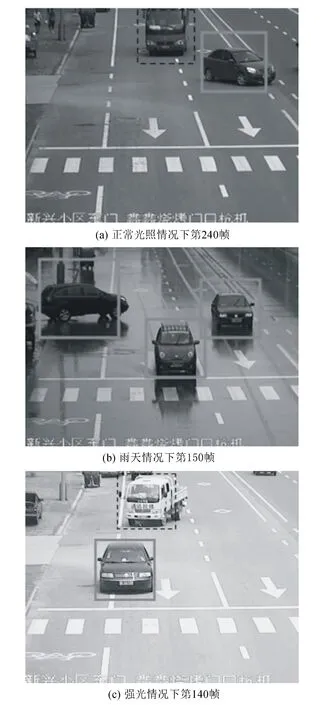
图10 不同光照条件本算法的鲁棒性效果Fig.10 Robustness renderings of the proposed method in different lighting conditions
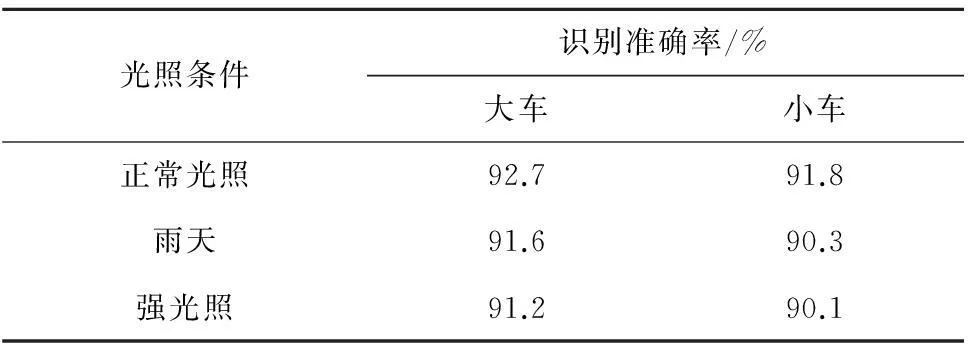
光照条件识别准确率/%大车小车正常光照92.791.8雨天91.690.3强光照91.290.1
实验发现,本算法对不同光照环境多个场景下的多个车辆方向都具备很好的检测识别效果。同时,在一定的范围内,随着样本数目的增加,漏检率总体呈现降低的趋势。在训练模板进行检测识别的过程中,将误检的车辆局部信息进行负样本循环训练,发现效果有削弱的趋势,可见并不是样本数目越多检测识别效果越好。
5结束语
通过建立级别自适应模型,基于HOG特征和SVM的车辆车型识别算法,提高了识别的准确度和速度。其中,大车车头和小车车身的HOG特征的选取结合SVM全特征训练分类算法,很好地解决了由于摄像头摄取视频的角度固定使得整个过长的大车车身很难出现在一个视频画面这一问题;通过LAM的建立,解决了原有HOG特征结合SVM算法中存在的速度慢、误检率高的问题,在提升识别正确率的同时具有较快的速度。在真实的卡口场景中,识别率达90.1%~92.7%。值得指出的是,对于横向和小角度的车辆,会将车辆的局部信息作为车辆检测出来,存在一定的误检,这是下一步研究的工作。
参考文献:
[1]季晨光,张晓宇,白相宇.基于视频图像中的车型识别[J].辽宁工业大学学报,2010,30(1):5-7.
[2]王慧斌,芦蓉.基于视频的车型特征提取及识别方法研究[J].微型电脑应用,2010,26(10):50-53.
[3]文学志,方巍,郑钰辉.一种基于类Haar特征和改进AdaBoost分类器的车辆识别算法[J].电子学报,2011,39(5):1121-1126.
[4]文学志,袁淮,刘威,等.一种改进的小波特征提取算法及其应用[J].小型微型计算机系统,2009,30(2):335-339.
[5]陈明明.视频中的车辆检测及车型识别研究[D].南京:南京邮电大学,2013,25-51.
[6]DALALN,TRIGGSB.Histogramsoforientedgradientsforhumandetection[C]//IEEEConferenceonComputerVisionandPatternRecognition,2005:1-8.
[7]王振亚,曾黄麟.一种基于帧间差分和光流技术结合的运动车辆检测和跟踪新算法[J].计算机应用与软件,2012,29(5):117-120.
[8]杨丹,于孟泽.车辆视频检测及阴影去除[J].计算机工程与设计,2011,32(6):2072-2079.
[9]薛丽霞,罗艳丽,王佐成.基于帧间差分的自适应运动目标检测方法[J].计算机应用研究,2011,28(4):1551-1559.
[10]CHENPaihsuen,LINChihjen,SCHÖLKOPFB.Atutorialonν-supportvectormachines[J].AppliedStochasticModelsBusinessandIndustry,2005,21:111-136.
[11]李弼程,邵美珍,黄洁.模式识别原理与应用[M].西安:西安电子科技大学出版社,2008:130-165.
[12]汪海燕,黎建辉,杨风雷.支持向量机理论及算法研究综述[J].计算机应用研究,2014,31(5):1281-1285.
编辑:翁史振
A level-adaptive algorithm for vehicle types recognition based on HOG and SVM
WU Di, CAI Xiaodong, HUA Na, ZHU Liwei, LIANG Benxiang
(School of Information and Communication Engineering, Guilin University of Electronic Technology, Guilin 541004, China)
Abstract:A level-adaptive algorithm based on histogram of oriented gradient(HOG)feature and support vector machine(SVM) is presented to improve recognition rate and efficiency in vehicle recognition. Firstly the HOG features of front part of big car and body of small car are chosen. Secondly a novel level-adaptive model(LAM) is designed to increase efficiency of detection and identification. Furthermore, a SVM classification strategy is utilized for designing a matching template to raise identification accuracy. Experimental results show that the proposed mechanism can provide high recognition rate, low false alarm rate and good robustness in different lighting conditions.
Key words:intelligent transportation system; histogram of oriented gradient; support vector machine; level-adaptive model; template matching
中图分类号:TP392.4
文献标志码:A
文章编号:1673-808X(2016)01-0023-06
通信作者:蔡晓东(1971-),男,广西贵港人,教授,博士,研究方向为智能视频处理、云计算、无线传感网络。E-mail:caixiaodong@guet.edu.cn
基金项目:国家科技支撑计划(2014BAK11B02);广西自然科学基金(2013GXNSFAA019326);桂林电子科技大学研究生教育创新计划(GDYCSZ201410)
收稿日期:2015-04-01