基于纵向滑移率均衡的车道偏离辅助控制研究
2016-03-15黄智刘剑吴乙万
黄智+刘剑+吴乙万

摘要:提出了一种无压力闭环的差动制动实现车道偏离辅助的控制方法.根据车辆和驾驶员参考模型确定纠正车道偏离所需的目标横摆角速度.采用滑模算法设计横摆角速度跟踪控制器,确定附加横摆力矩.基于纵向滑移率均衡设计车轮制动压力调节策略,限制车轮最大滑移率,以提高车辆横向稳定性.设计模糊控制器对压力建立过程进行伺服控制.在Carsim/Labview-RT联合仿真平台上对提出的方法进行硬件在环仿真试验,试验结果表明,所提出方法能有效避免车辆偏离车道,鲁棒性强,且车辆横向稳定性好.
关键词:车道偏离辅助;差动制动;纵向滑移率;滑模
中图分类号:U461.91 文献标识码:A
文章编号:1674-2974(2016)02-0001-07
随着人们对交通安全的日益关注,近十年来,通过主动干预车辆的纵横向动力学以避免车道偏离事故的车道偏离辅助系统(LDAS)成为先进驾驶辅助技术的研究热点.目前车道偏离辅助控制的实现途径主要有3种:主动转向控制[1-3], 差动制动控制[4-5], 以及基于轮边驱动的驱动控制[6-7].主动转向通过向转向机构提供额外转向力或位移纠正车辆行驶方向.差动制动利用车辆装备的ABS/ESP制动系统,主动产生制动压力,对单个或多个车轮制动,通过差动制动力产生附加横摆力矩,纠正车辆行驶方向.差动制动方式无需增加额外执行部件,且对驾驶员转向操作无干扰,简化了人机协同控制方法,近年来引起研究者的关注.
湖南大学学报(自然科学版)2016年第2期黄智等:基于纵向滑移率均衡的车道偏离辅助控制研究差动制动控制中,准确、快速地建立制动压力并保持车辆横向稳定性是研究者关注的重点.李剑锋等[6]、余卓平等[7]通过电机制动力分配以达到横摆角速度准确跟踪的目的,但只适用于轮边驱动电动汽车的制动力分配.杨涛等[8]通过预测控制,叠加差动制动力矩提高车辆横向稳定性,在低附着路面具有较好的控制性能,但预测控制性能依赖于建模精度.丁能根等[9]通过实验分析了ABS系统的响应特性,提出制动压力的精细调节方法.马国成等[10]提出改进PID的液压制动压力伺服控制,控制性能好,但需要制动压力反馈,增加了系统成本.李亮等[11]通过对ESP液压单元试验,得到了ESP液压制动系统特性,根据液压模型与反模型进行压力估算并进行制动压力调节.液压模型的准确性受电压、温度等因素影响,且使用过程中阀芯磨损将导致模型误差增加.
本文提出一种基于差动制动的车道偏离辅助控制方法,设计了滑移率均衡的制动力分配策略,无需制动压力反馈,并将所有车轮滑移率控制在接近范围,避免车轮出现较大滑移率而导致侧向附着能力降低,算法实现了对车道偏离辅助目标横摆角速度的稳定、准确跟踪,可有效避免车道偏离事故.
1车道偏离辅助控制
1.1控制系统结构
车道偏离辅助控制系统结构如图1所示.车道、转向力及车辆动力学信息输入到辅助决策控制模块,当条件满足时启动差动制动.期望横摆角速度模块计算车道偏离辅助所需的横摆角速度,横摆角速度跟踪控制器确定附加横摆力矩方向并选择制动车轮,基于纵向滑移率均衡约束确定制动增减压,驱动液压制动单元产生期望制动力.
1.2辅助控制决策
采用文献[12]提出的车辆偏离车道时间(Time to Lane Crossing, TLC)的决策方法.
TLC=(D/2-DLC)/Vy. (1)
式中:D为车道宽度;Vy为车辆横向速度;DLC (Distance to Lane Center)为车辆至车道中心的横向距离.
综合考虑车速及驾驶员反应时间,制定控制决策,见表1[13].
2纵向滑移率均衡的制动压力控制
2.1等效前轮纵向滑移率
文中研究的车辆为前置前驱.在动力传动系统未断开情况下,差速器的存在使得未制动一侧的驱动轮将获得更大的驱动力,纵向滑移率幅值进一步增大,严重时可能出现驱动打滑工况(纵向滑移率<0).受制动一侧的驱动轮的纵向滑移率幅值首先减小,当制动力大于驱动力时,将进入制动状态(纵向滑移率>0),纵向滑移率幅值增大.上述现象在中低附着路面时尤为突出.因此本文设计等效前轮纵向滑移率参数,综合考虑内前轮(施加制动侧前轮)和外前轮(未制动侧前轮)的纵向滑移率,反映前轮的滑转程度.
由式(9)可知,当Sxfi小于Sxfo时,说明内侧制动力可以忽略,不影响制动决策,取Sxf=0;当Sxfi与Sxfo相差过大时,取内外侧前轮的最大绝对滑移率反映前轮滑转程度,以抑制车轮滑转.其余情况下取前轮内外侧滑移率绝对值的加权平均值反映前轮滑转程度.
2.2纵向滑移率均衡的增减压控制
车轮纵向滑移率是衡量车辆横向稳定性的重要参数.当车轮纵向滑移率超过设定上限值Sd时,车辆的横向稳定性迅速降低.为确保车辆横向稳定性,车轮纵向滑移率应小于上限值Sd.
前后轮制动力的分配不当,可能引起前轮或后轮纵向滑移率过大.为确保车辆具有足够的横向稳定裕度,采用如下纵向滑移率均衡方法,使所有车轮的纵向滑移率尽可能小:
1)当制动控制侧任一车轮滑移率S>Sd时,进行减压控制;
2)当制动控制侧任一车轮滑移率S≤Sd时,分为如下3种控制模式:
①当Sxf-Sxr>SΔ时,前轮的纵向滑移率趋向过大,后轮有较大的横向稳定裕度,此时前轮减压,后轮增压.其中Sxr为后轮最大纵向滑移率,SΔ为前后轮纵向滑移率偏差阈值.
②当Sxf-Sxr<-SΔ时,前轮有较大的横向稳定裕度,后轮纵向滑移率趋向过大,前轮增压,后轮减压.
③当-SΔ
3差动制动压力的伺服控制
3.1液压制动系统的增减压特性
液压制动单元结构如图3所示.通过对泵电机和液压阀的控制实现轮缸制动压力调节.为便于制动伺服控制算法的分析、设计,试验研究了PWM脉冲驱动下液压制动单元的增减压特性.
PWM增压有效调节范围为35%~80%,在此范围内,增压速率随占空比增大而增加,最大增压速率为0.03 MPa/ms.
PWM占空比对减压速率基本无影响.3种阀开关组合下的减压响应特性如图5所示,常规减压模式(出油阀和回路控制阀开启,其余关闭)的减压速率最快,回路控制阀关闭时减压速率较慢,进油阀开启时的减压速率最慢.通过对回路控制阀与进油阀的控制,获得不同减压速率.
3.2制动伺服控制算法
制动压力控制分为增压、减压和保压3种模式.保压模式由PWM占空比为25%的增压控制状态代替.结合制动系统减压特性,伺服控制过程分为增压和减压2种基本模式.
t/s
1)增压模式,根据上一周期的模式确定控制单元当前动作:①上一周期增压时,高压阀开启,回路控制阀关闭,泵电机启动,由模糊控制器确定当前周期进油阀的PWM占空比.②上一周期减压时,高压阀开启,回路控制阀关闭,泵电机启动,进油阀全开.
2)减压模式,根据上一周期的模式确定控制单元当前动作:①上一周期增压时,回路控制阀关闭,高压阀关闭,进油阀开启,减压阀开启,泵电机关闭;②上一周期减压时,回路控制阀关闭,高压阀开启,进油阀关闭,减压阀打开,泵电机启动.
基于前述液压制动系统的工作特性,设计模糊控制器,对增压过程进行控制.模糊控制的输入为实际横摆角速度与目标角速度之差Δγ及其一阶微分Δ,输出为增压PWM占空比.Δ范围为[0,50],Δγ范围为[0,10],PWM占空比范围为[25%,80%].将输入的论域定义为5个模糊子集:小(TL)、较小(L)、适中(M)、较大(H)、大(TH);将输出变量论域定义为7个模糊子集:极小(TTL)、小(TL)、较小(L)、适中(M)、较大(H)、大(TH)、极大(HH) .得到增压模糊控制规则见表2.采用重心法解模糊,得到增压PWM占空比.
4硬件在环(HIL)仿真试验
为评估所提出的控制方法,采用基于Carsim/Labview-RT搭建的硬件在环仿真平台,进行了仿真试验研究.HIL仿真软件平台由LabviewRT嵌入式实时系统、Carsim车辆动力学模型和控制模型等构成,如图6所示.
硬件台架以实车的制动、转向系统为基础搭建,并包括真空助力和路感模拟系统等,如图7所示.
车辆参数见表3.
工况设定:车速100 km/h,道路为直道,路宽为3.5 m,路面附着系数分别为0.4,0.6和0.8.假定驾驶员在1~5 s内未对车辆进行控制,期间方向盘右偏5°.从第1 s开始,由于驾驶员未能纠正方向盘,车辆向右偏离车道,当DLC或TLC达到启动阈值时,LDAS启动.系统实时计算车辆的目标横摆角速度,液压伺服控制器根据LDAS给出的控制目标控制液压单元动作,产生附加横摆力矩,纠正车辆行驶方向.
图8给出了差动制动控制下的试验结果.试验结果表明在各种路面附着系数下,都能使车辆回到车道内.
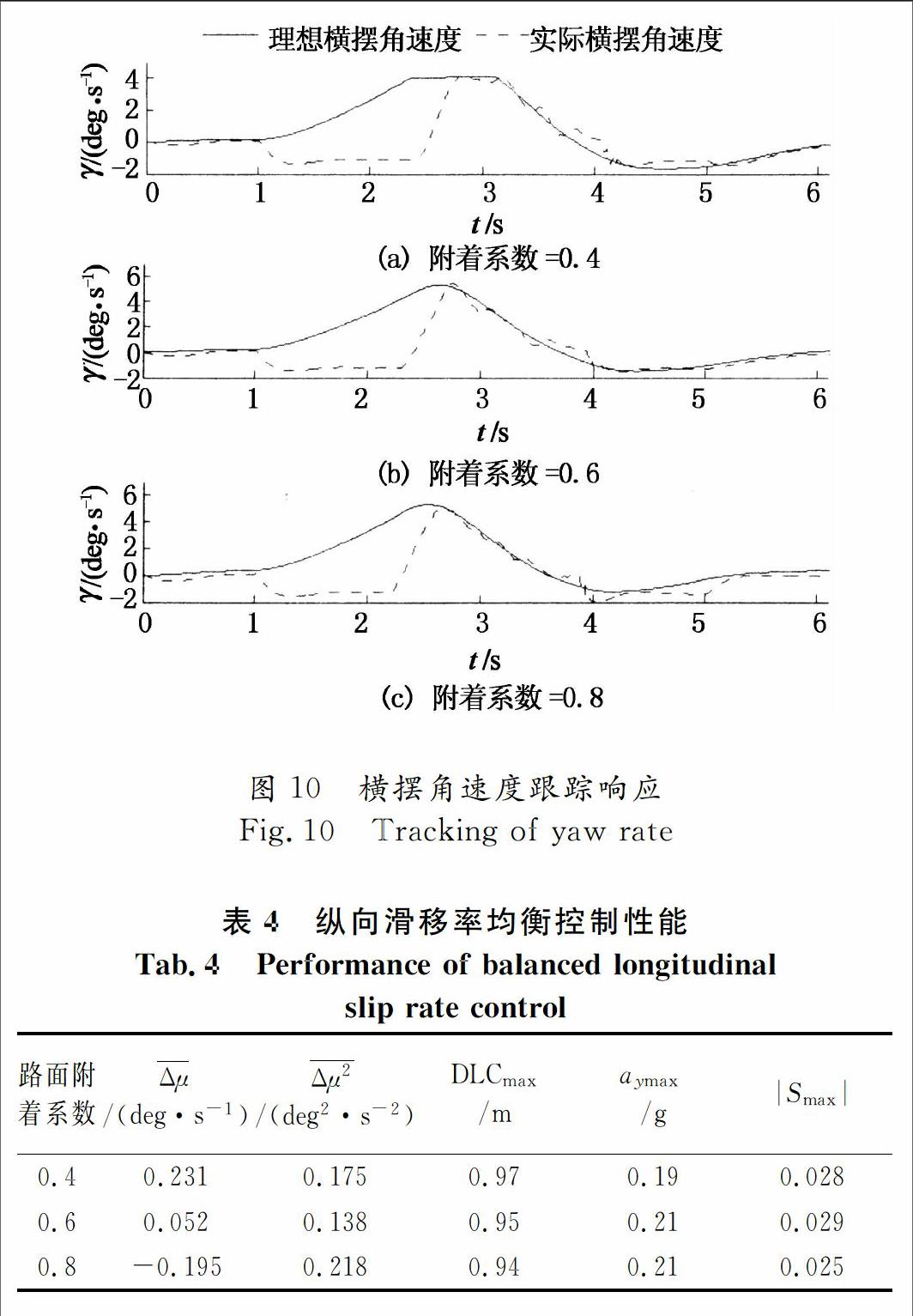
图9和图10为制动压力和横摆角速度响应.控制过程中对左侧车轮进行制动,右侧车轮制动压力为零,产生附加逆时针横摆力矩,以纠正车辆右偏趋势.
以横摆角速度响应第一次达到目标值至辅助控制结束期间的实际横摆角速度与目标值之差的平均值Δμ和均方差值Δμ2反映横摆跟随性能,以车轮最大纵向滑移率幅值反映车辆的横向稳定性,结果见表4.在纵向滑移率均衡控制下,车辆被纠正回车道,侧向加速度小于路面所能提供的最大侧向加速度.
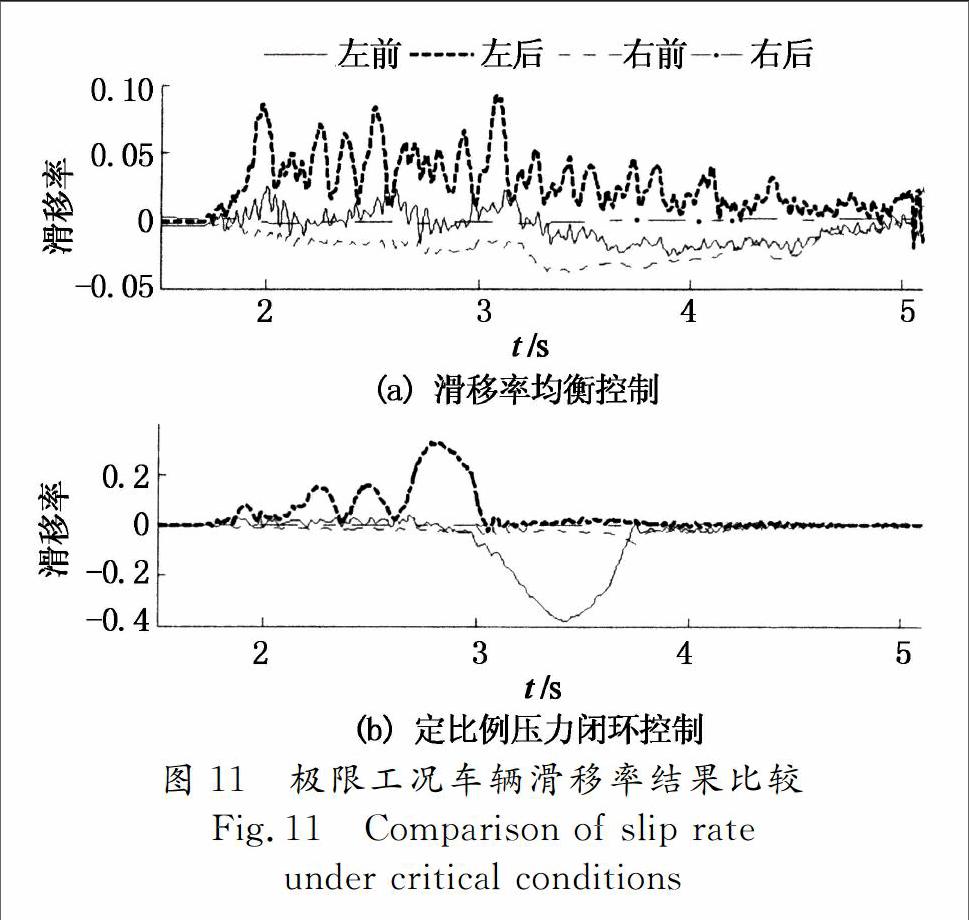
本文研究重点是解决恶劣工况下的车辆稳定性问题,因此对恶劣工况下的车辆横向稳定性和车道偏离控制性能进行试验,并以定比例分配的压力闭环控制为比较对象,进行极限工况下的对比研究.定比例分配压力闭环控制是根据车辆模型计算出期望附加横摆力矩,结合前后轴载荷和制动器理论模型将期望附加横摆力矩转换成前后车轮的制动压力,通过压力闭环控制实现横摆跟踪.试验工况:车速100 km/h,道路为直道,路宽为3.5 m,路面附着系数为0.4,假定驾驶员在1~5 s内未对车辆进行控制,期间方向盘右偏15°.两种方法的试验结果如图11所示.在纵向滑移率均衡约束下,车轮纵向滑移率幅值限制在0.1以内(控制参数Sd=0.1),车辆具有较好的横向稳定性.定比例压力分配控制时,前后轮滑移率分别达到-0.38和0.32,车辆横向稳定性较差.
如图12所示,在极限工况下,滑移率均衡约束控制的最大DLC为1.46 m,最大质心侧偏角β小于2°,车辆部分偏离车道,但车辆没有出现侧滑等危险工况.定比例分配控制的最大DLC为4.65 m,最大质心侧偏角β为5.9°,车辆已经发生较严重的侧滑,并完全偏离车道.
5结论
本文研究了一种基于差动制动的车道偏离辅助控制方法,提出了以前后轮纵向滑移率均衡为约束目标的制动压力增减压控制策略.根据液压制动单元的响应特性,设计了制动压力伺服控制器.在硬件在环仿真平台上对所提出的方法进行了仿真试验研究,试验结果表明:
1)在各种设定工况下,基于差动制动的LDAS能有效避免车道偏离事故发生.
2)与定比例分配的压力闭环控制相比,所提出的方法将车轮的最大滑移率控制在设定值以内,在最大程度减小道路偏离量的同时改善了车辆横向稳定性.
3)所提出方法的控制性能不依赖于对象模型的精度,具有较高的鲁棒性.同时所提出的方法可在现有ABS/ESP系统中集成,无需额外增加传感器和执行器,具有良好的应用前景.
参考文献
[1]MARINO R, SCALZI S, NETTO M. Nested PID steering control for lane keeping in autonomous vehicles[J]. Control Engineering Practice, 2011,19(12): 1459-1467.
[2]SWITKES P, ROSSETTER E J, COE I A, et al. Hand wheel force feedback for lanekeeping assistance: combined dynamics and stability [J]. Journal of Dynamic Systems, Measurement and Control, 2006, 28(3): 532-542.
[3]MINOIU N, NETTO M, MAMMAR S, et al. Driver steering assistance for lane departure avoidance [J].Control Engineering Practice, 2009, 17(6): 642-651.
[4]BRAITMAN K A, MCARTT A T, ZUBY D S, et al. Volvo and Infiniti drivers experiences with select crash avoidance technologies [J]. Traffic Injury Prevention, 2010,11(3): 270-278.
[5]ZHAO C M, XIANG W D, RICHARDSON P. Vehicle lateral control and yaw stability control through differential braking[C]//Proceedings of IEEE International Symposium on Industrial Electronics. New York: IEEE, 2006:384-389.
[6]李剑锋,高利,靳宇伟.车辆横摆角速度跟踪控制方法[J].农业机械学报,2007,38(7):186-188.
LI Jian-feng,GAO Li,JIN Yu-wei.Vehicle yawing angular velocity tracking control method [J].Transactions of the Chinese Society of Agricultural Machinery, 2007,38(7):186-188.(In Chinese)
[7]余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报:自然科学版,2008,36(8):1116-1119.
YU Zhuo-ping, JIANG Wei, ZHANG li-jun. Torque distribution control for four wheel in-wheel-motor electric vehicle[J].Journal of Tongji University: Natural Science, 2008,36(8):1116-1119. (In Chinese)
[8]杨涛,宋丹丹.弯道路面车辆稳定性的预测控制仿真[J].公路交通科技,2012, 29(10):149-152.
YANG Tao, SONG Dan-dan. Simulation of predictive control for vehicle yaw stability on curve [J]. Journal of Highway and Transportation Research and Development,2012, 29(10):149-152. (In Chinese)
[9]丁能根,潘为民,方裕固,等.ABS 压力响应测试和压力的精细调节[J].机械工程学报,2004,40(7):188-190.
DING Neng-gen, PAN Wei-min, FANG Yu-gu,et al. Measurement of hydraulic pressure response for ABS and fine regulation of pressure[J].Chinese Journal of Mechanical Engineering,2004,40(7):188-190.(In Chinese)
[10]马国成,刘昭度,裴小飞,等.汽车自适应巡航控制主动制动实现方法[J].北京理工大学学报,2012,32(2):120-124.
MA Guo-cheng, LIU Zhao-du, PEI Xiao-fei, et al. Research on the active braking control of adaptive cruise control system for automobiles[J]. Transactions of Beijing Institute of Technology,2012,32(2):120-124. (In Chinese)
[11]李亮,宋健,韩宗奇,等.用于电子稳定程序(ESP)在线控制的液压模型和反模型[J].机械工程学报,2008,44(2):139-144.
LI Liang, SONG Jian, HAN Zong-qi, et al. Hydraulic model and inverse mode for electronic stability program online control system[J]. Chinese Journal of Mechanical Engineering,2008,44(2): 139-144. (In Chinese)
[12]MAMMAR S, GLASER S, NETTO M. Time to line crossing for lane departure avoidance: a theoretical study and an experimental setting[J]. IEEE Transactions on Intelligent Transportation Systems, 2006,7(2): 226-241.
[13]吴乙万, 黄智, 刘李盼.基于差动制动的车道偏离辅助控制[J].中国机械工程,2013,24(21): 2977-2981.
WU Yi-wan, HUANG Zhi, LIU Li-pan. Differential braking control for lane departure avoidance [J].China Mechanical Engineering,2013,24(21):2977-2981. (In Chinese)
[14]MACADAM C C. Application of an optimal preview control for simulation of closed-loop automobile driving [J]. IEEE Transactions on Systems, Man and Cybernetics, 1981,11(6): 393-399.
[15]彭晓燕,陈昌荣,章兢.电子机械制动系统的滑模控制研究[J]. 湖南大学学报:自然科学版,2010,37(8):35-39.
