船舶推进轴系纵向振动特性及控制技术研究
2016-02-26张阳阳楼京俊
张阳阳,楼京俊
(海军工程大学 动力工程学院,武汉 430033)
船舶推进轴系纵向振动特性及控制技术研究
张阳阳,楼京俊
(海军工程大学 动力工程学院,武汉430033)
摘要:船舶推进轴系受到螺旋桨非定常激振力作用,产生纵向振动。通过建立船舶推进轴系分布质量模型,分析轴系纵向固有频率及影响因素;通过有限元分析软件Patran仿真分析被动式动力吸振器和主动控制方法对轴系纵向振动的控制效果。研究表明:螺旋桨质量和附链水对轴系固有振动特性影响较大;被动式动力吸振器受吸振器质量的限制,不如主动控制方法对轴系纵向振动控制效果好;主动控制力在达到激振力一半以上时就可以取得较好的控制效果,但必须考虑系统时滞的影响。
关键词:轴系;纵向振动;被动控制;主动控制;时滞性
本文引用格式:张阳阳,楼京俊.船舶推进轴系纵向振动特性及控制技术研究[J].兵器装备工程学报,2016(1):23-26.
Citation format:ZHANG Yang-yang, LOU Jing-jun.Study on Longitudinal Vibration Characteristic and Control Technology of Propulsion Shafting[J].Journal of Ordnance Equipment Engineering,2016(1):23-26.
推进轴系主要由螺旋桨、轴系、推进电机、轴承等部件组成。由于船舶尾部不均匀伴流场的存在,螺旋桨除了产生轴向定常激励力推动船舶前进外,还会产生周期性变化的非定常激励力。Chertock的研究结果表明90%以上的螺旋桨激励力都通过推进轴系间接传递至艇体上。国外学者的研究指出,推进轴系纵向振动是艇体低频辐射噪声的主要来源[1-3]。
在国外,Goodwin最早提出利用共振转换器减小推进轴系的纵向振动;Kessissoglou 基于四端参数法和传递功率流研究了安装轴向减振器的减振降噪效果;澳大利亚学者Jie Pan设计了一个模拟装置,对螺旋桨脉动推力引起的轴系轴向振动进行实验测试。在国内,曹贻鹏分析了安装动力吸振器和轴向减振器对轴系纵振的控制效果;秦春云设计了磁流变动力吸振器,通过仿真的方法研究了半主动吸振器的控制效果;李攀硕提出采用电磁作动器对轴系纵振进行主动控制,实验结果表明主动控制可有效抑制壳体振动。
本研究建立了推进轴系的分布质量模型,通过理论计算和有限元分析的对比,验证了模型的准确性;通过有限元软件Patran仿真分析了轴系的固有振动特性及其影响因素;通过仿真分析比较了安装动力吸振器和采用主动控制方法对轴系纵向振动的控制效果。
1数学模型
轴系几何模型如图1 所示,包括推力轴、中间轴、艉轴和螺旋桨。在兼顾计算精度的前提下,为了建模和计算的方便,螺旋桨以集中质量表示,其余轴段按照体积等效原则简化为均匀轴,简化后轴系的分布质量模型如图2 所示。
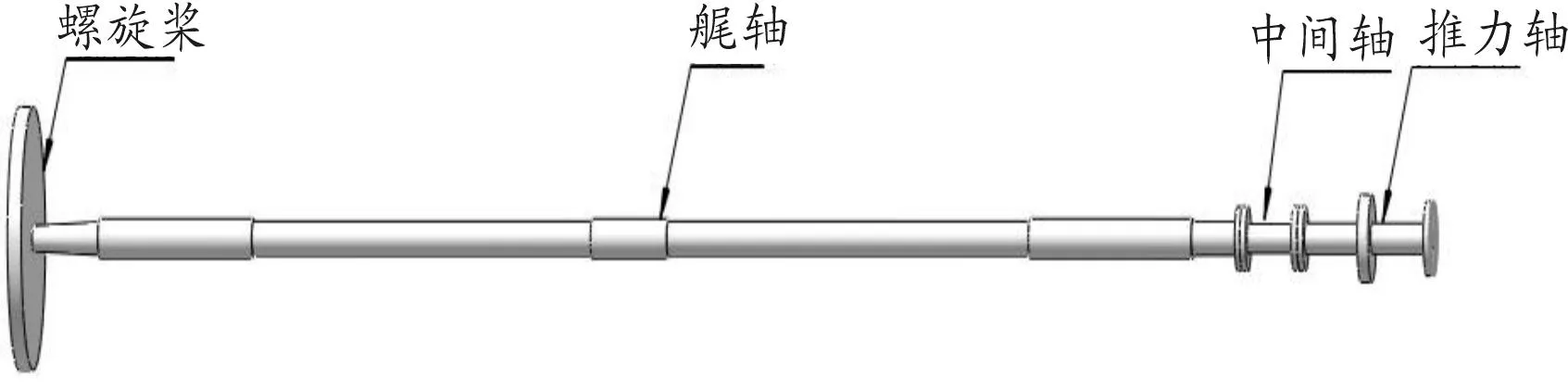
图1 轴系几何模型
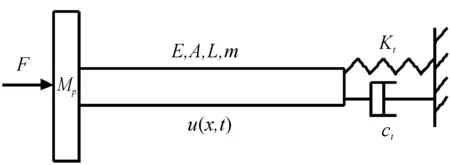
图2 轴系分布质量模型
轴系纵向自由振动的运动微分方程为[4]
(1)
其中:E,A为材料弹性模量,均匀轴的等效横截面积;L,m为均匀轴的等效轴长度,均匀轴的等效线密度;F,Mp为螺旋桨激振力,螺旋桨质量;Kt,Ct为推力轴承等效刚度,推力轴承等效阻尼。
边界条件为:
(2)
当系统作自由振动且不考虑推力轴承的阻尼时,可简化为
(3)
解方程组可得
(4)
这是一个以βL为自变量的超越方程,以某船推力轴为例,取Mp=3 875 kg,E=2.1×1011N/m2,Kt=1.2×109 N/m,L=14.688 m,A=0.056 391 75 m2,m=439.883 kg/m。结合Matlab软件,利用图解法可以求解。
轴系纵振固有频率为
(5)
2有限元模型
在三维建模软件Solidworks中建立轴系的几何模型,导入有限元分析软件Patran中,对其进行网格划分,赋予属性并建立边界条件,轴系有限元模型如图3所示。
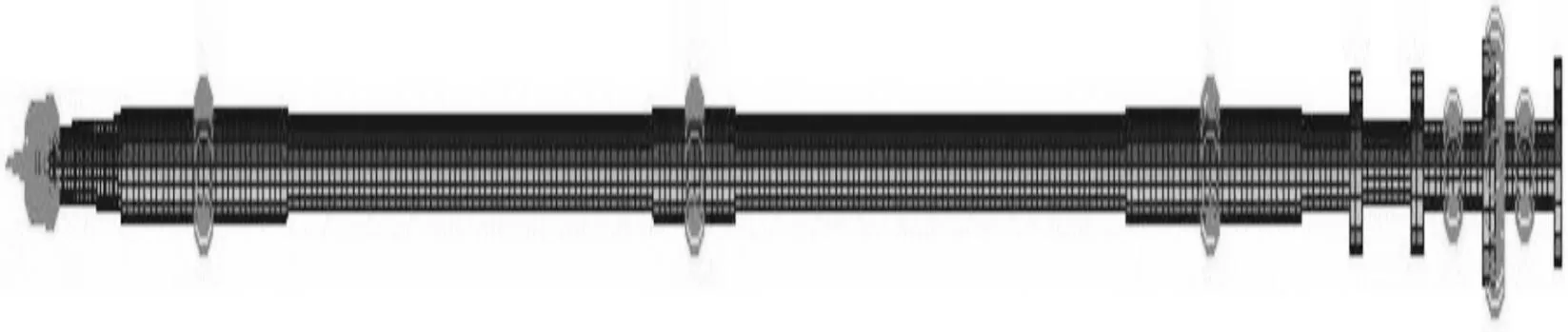
图3 轴系有限元模型
模态分析结果如表1所示。
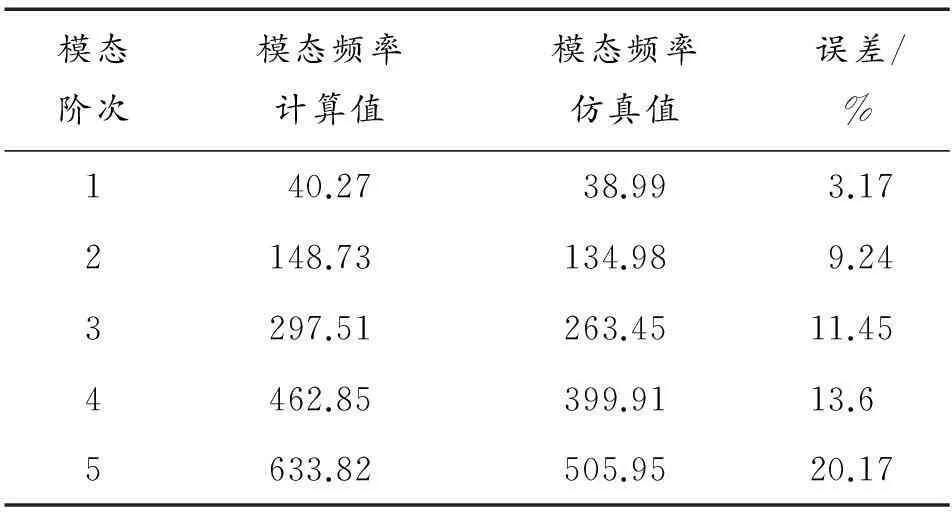
表1 模态频率对比 Hz
从表1 可以发现,轴系前5阶模态频率的计算结果与仿真结果的误差在逐渐增大。第1阶模态频率最接近,误差仅为3.17%;随着阶数的提高,计算结果偏离仿真结果的趋势越来越明显,这是因为高阶振动受分布质量的影响较大,将轴系简化为均匀轴,螺旋桨简化为集中质量的数学模型无法满足高阶振动计算的精度要求。但是,对于螺旋桨激励力引起的推进轴系纵向振动来说,分析频率上限不应超过100Hz[5]。因此,该模型对研究轴系纵向振动具有足够的计算精度。
图4中,附涟水质量取螺旋桨质量的25%。从图4可以看出,在考虑螺旋桨质量后,轴系前5阶模态频率较无螺旋桨时有明显的下降;考虑附涟水后,轴系模态频率较只考虑集中质量螺旋桨时有小幅度下降。因此,研究轴系纵向振动时必须考虑螺旋桨质量和附链水的影响。
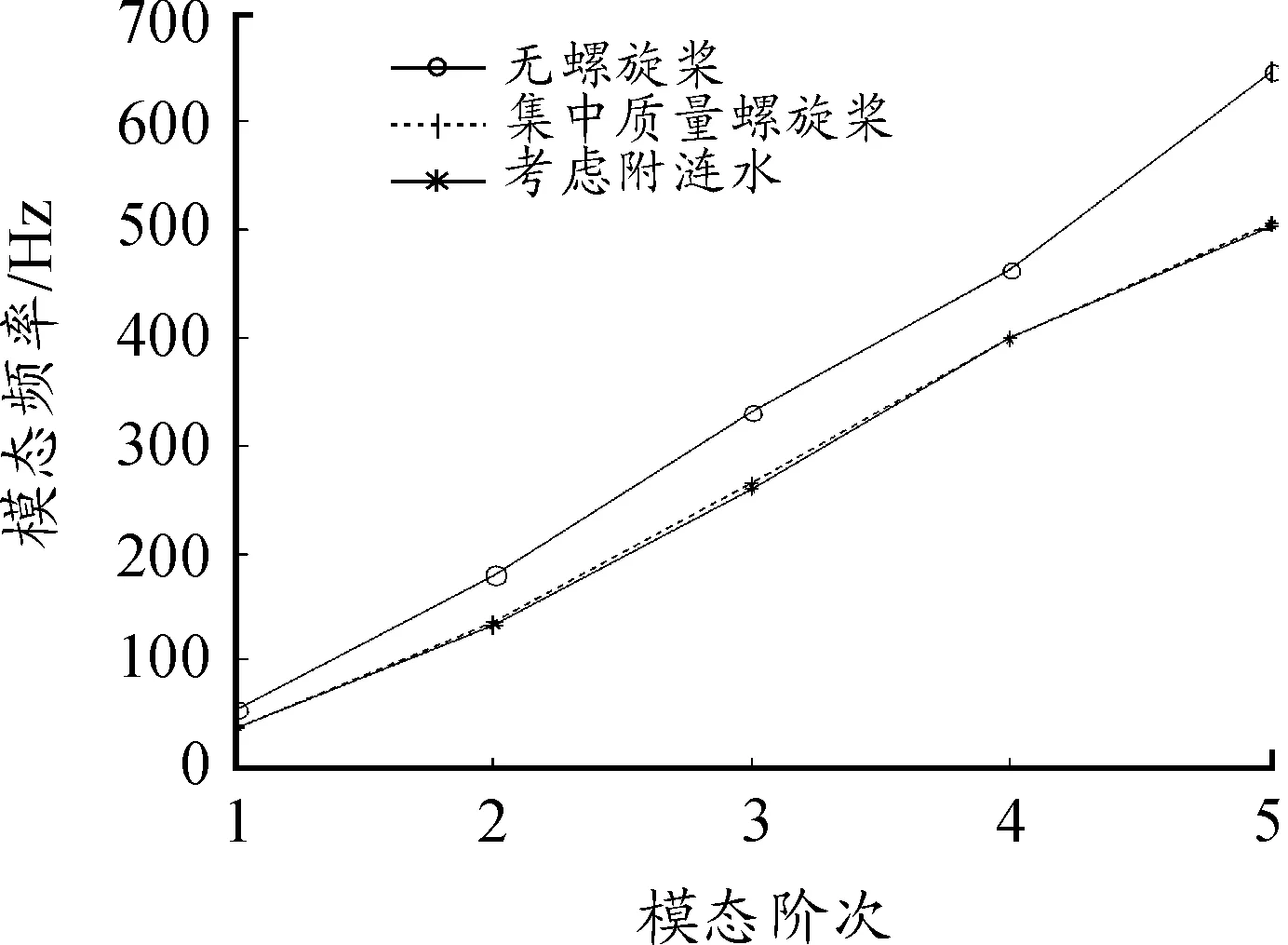
图4 轴系模态频率影响因素分析
3控制技术研究
目前,对轴系纵向振动的控制仍处于理论研究阶段,实现工程化的产品很少见。被动控制技术在其他振动控制工程中被广泛使用,具有结构简单,对固定振动频率控制效果好的优点;主动控制技术通过外加能源系统对振动进行控制,具有控制频段宽,控制效果好的优点,尤其对低频振动的控制具有一定优势。下面通过仿真比较主被动控制技术在轴系纵向振动控制方面的控制效果。
3.1被动控制效果
被动式动力吸振器安装在中间轴上。图5是不同质量比的被动式动力吸振器作用下推力轴处的频率响应曲线。从图5中可以看出,采用被动式动力吸振器可以有效降低轴系在1阶共振频率处的振幅,且随着吸振器质量比的增大,吸振效果相对提高。
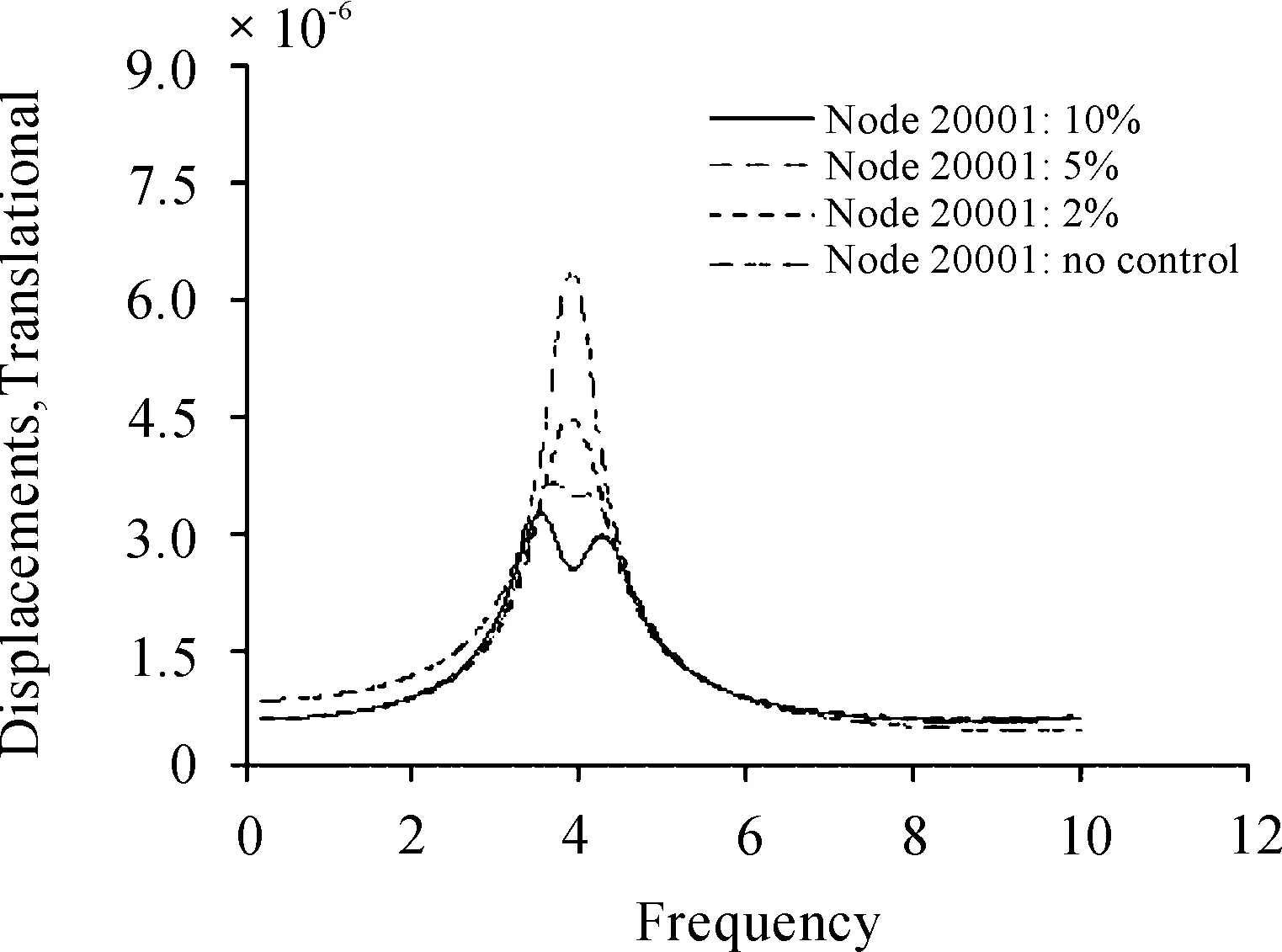
图5 不同质量比时推力轴处的频率响应
考虑到吸振器的添加会引起轴系的横向变形,因此吸振器质量比不宜过大,一般取0.02~0.03即可[6-10]。对于大型舰船,轴系质量通常较大,即使被动式动力吸振器取0.02的质量比,也会引起轴系较大的横向变形,同时还会影响支撑轴承的负荷,对轴系对中产生不良影响,因此被动式动力吸振器在轴系纵向振动中的使用受到限制。
图6是吸振器总的质量比相同,吸振器数量分别为1个,2个和3个时推力轴处的频率响应分析。可以看到,总的质量比一定时,采用多个小质量比吸振器比采用单个吸振器可以取得更好的吸振效果。
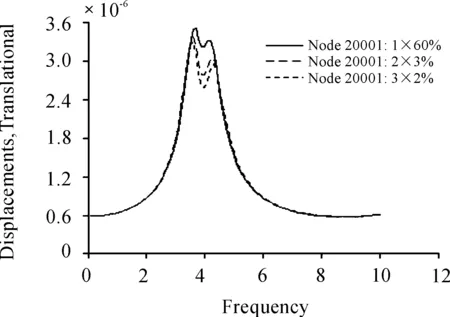
图6 不同吸振器数量时推力轴处的频率响应
3.2主被动控制效果比较
图7是被动式动力吸振器与主动控制下推力轴处的频率响应曲线,其中被动式动力吸振器的质量比取0.02;主动控制作动器采用惯性式作动器,安装在中间轴上,控制器通过分析推力轴承基座处的加速度响应和轴系的转速信号产生控制信号,通过功率放大器控制作动器产生相应的控制力,控制轴系的纵向振动。
从其中可以看出,主动控制力达到激振力的50%时,主动控制效果与被动式动力吸振器控制效果相当;主动控制力达到激振力的100%时,主动控制效果明显优于被动控制效果。
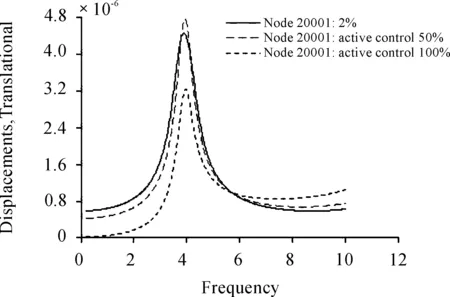
图7 被动控制与主动控制下推力轴处的频率响应
3.3主动控制影响因素
主动控制系统是有源控制,需要通过传感器采集轴系的振动信号,再经过控制器运算发出控制信号,使作动器输出相应的控制力。从信号的采集到控制器的运算,再到作动器做出响应,需要一定的时间,导致作动器控制力相比于传感器采集到的轴系振动信号具有一定的时滞性。
图8是主动控制系统时滞性对推力轴处位移响应的影响曲线。可以看到,没有进行相位补偿时,主动控制效果不明显,当考虑了系统的时滞性,进行相位补偿后,主动控制效果明显提高。
图9是主动控制力大小变化时推力轴处的频率响应曲线。从其中可以看到,提高主动控制力可以取得更好的控制效果。当主动控制力超过激励力的一半以后,控制效果越来越明显。
图10是主动控制力作用位置不同时推力轴处的频率响应曲线。5条曲线的作用位置分别为:中间轴,艉轴前轴承后1m,艉轴前轴承后2m,艉轴中轴承后1m,艉轴中轴承后2m。从其中可以看到,主动控制力的作用位置对轴系纵向振动的控制具有一定的影响,控制位置越靠近螺旋桨激振力位置,控制效果越好。但在中间轴位置执行器安装起来更方便。
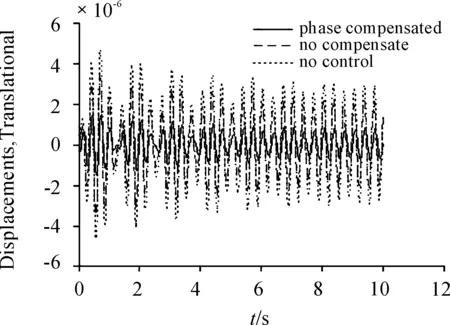
图8 考虑主动控制时滞推力轴处的位移响应
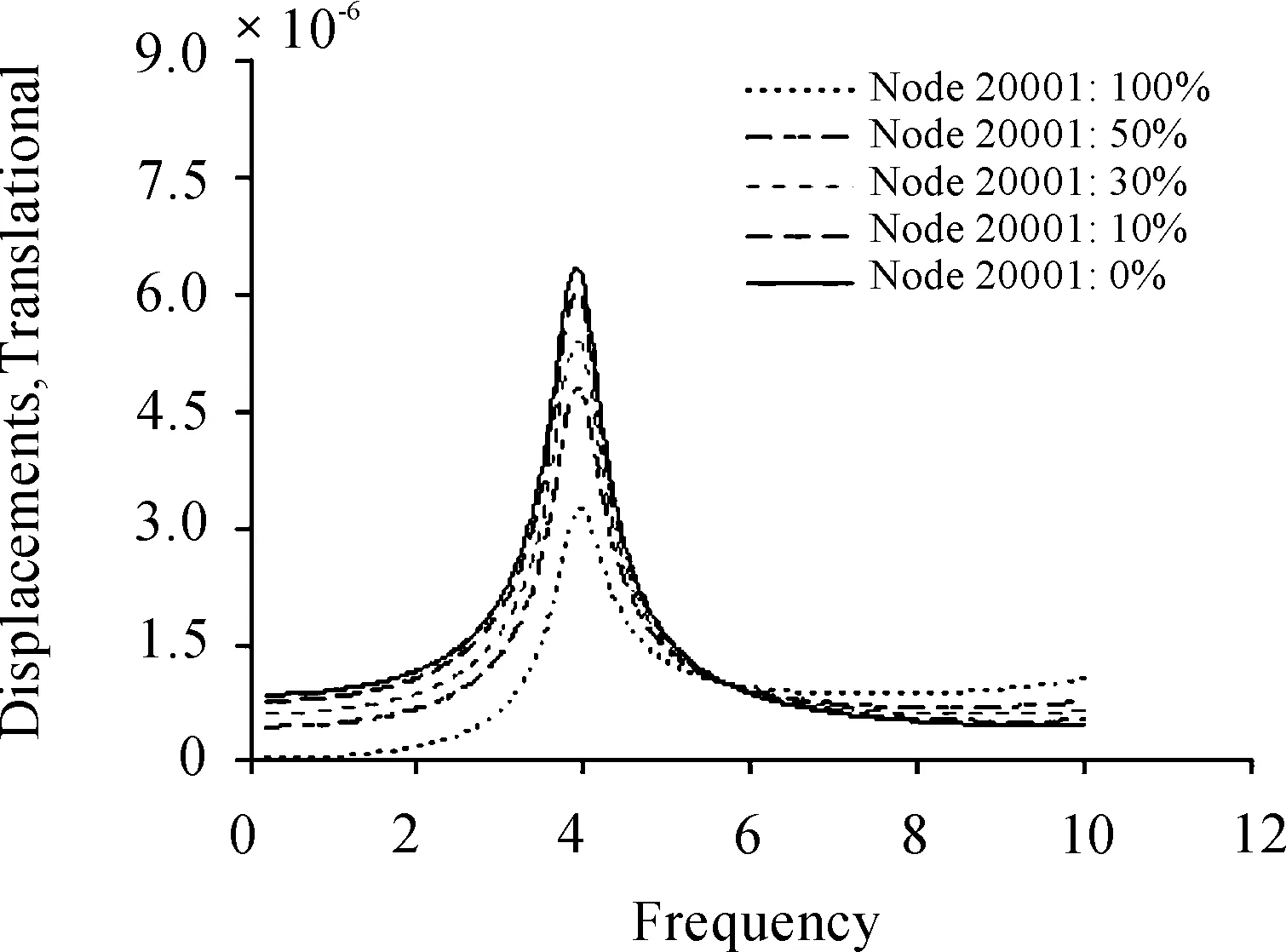
图9 不同主动控制力下推力轴处的频率响应
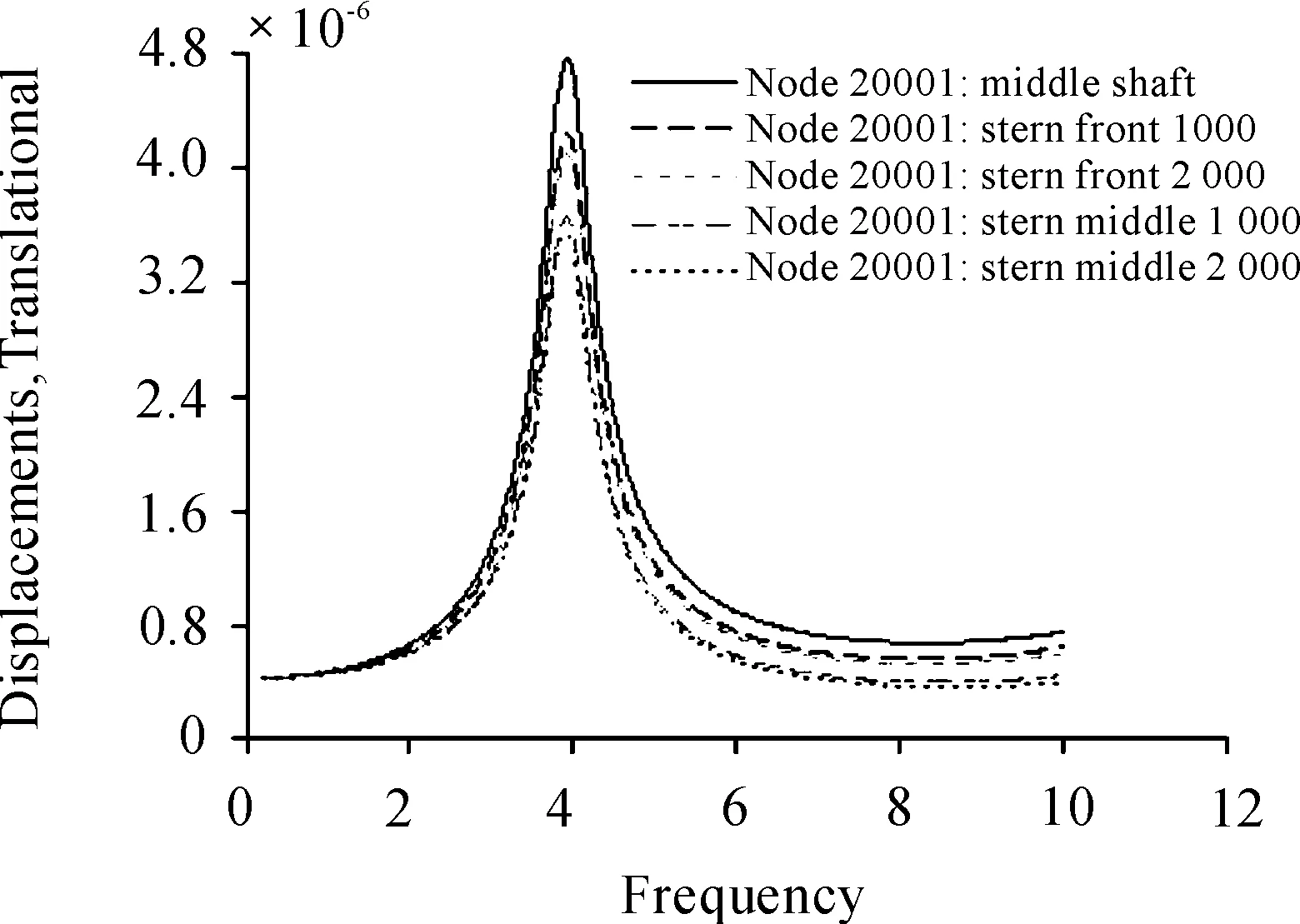
图10 不同主动力作用位置下推力轴处的频率响应
4结论
1) 螺旋桨质量和附链水对轴系固有振动特性影响较大,研究轴系纵向振动时必须考虑;
2) 受吸振器质量的限制,被动式动力吸振器对轴系纵向振动的控制效果不如主动控制方法效果好;
3) 总质量比一定时,采用多个小质量比吸振器比采用单个吸振器可以取得更好的吸振效果;
4) 主动控制力在达到激振力一半以上时就可以取得较好的控制效果,但必须考虑系统时滞的影响,进行相位补偿;
5) 主动控制力的作用位置越靠近螺旋桨激振力位置,控制效果越好,但要考虑安装是否方便。
参考文献:
[1]PAULG,DYLEJKO,NICOLEJK.Optimizationofaresonancechangertominimizethevibrationtransmissioninmarinevessels[J].JournalofSoundandVibration,2007(300):101-116.
[2]DYLEJKOPG,KESSISSOGLOUN.Minimizationofthevibrationtransmissionthroughthepropellershaftingsysteminasubmarine[J].JournaloftheAcousticalSocietyofAmerica,2004,116(4):25-69.
[3]DALEYS,JOHNSONFA,PEARSONJB.Activevibrationcontrolformarineapplications[J].ControlEngineeringPractice,2004,12(4):465-474.
[4]朱石坚,楼京俊,何其伟.振动理论与隔振技术[M].北京:国防工业出版社,2006.
[5]赵耀,张赣波,李良伟.船舶推进轴系纵向振动及其控制技术研究进展[J].中国造船,2011,52(4):259-269.
[6]秦春云,杨志荣,饶柱石,等.船舶推进轴系纵向振动抑制研究[J].噪声与振动控制,2013,33(3):147-152.
[7]刘耀宗,王宁,孟浩.基于动力吸振器的潜艇推进轴系轴向减振研究[J].振动与冲击,2009,28(5):184-187.
[8]BAZA,GILHEANYJ,STEIMELP.Activevibrationcontrolofpropellershafts[J].JournalofSoundandVibration,1990,136(3):361-372.
[9]王光荣.潜艇纵向振动计算及振动特性[J].海军工程大学学报,2005,17(2):59-62.
[10]冯国平,谌勇,黄修长,等.舰艇艉部纵向激励传递特性分析[J].噪声与振动控制,2009(6):132-135.
(责任编辑周江川)
楼京俊(1976—),男,博士,教授,博士生导师,主要从事舰船振动与噪声控制技术研究。
【装备理论与装备技术】
Study on Longitudinal Vibration Characteristic and
Control Technology of Propulsion Shafting
ZHANG Yang-yang, LOU Jing-jun
(Institute of Power Engineering, Naval University of Engineering, Wuhan 430033, China)
Abstract:Under the effect of unsteady exciting force, propulsion shafting arose lengthways vibration. We analyzed the longitudinal inherent frequency and influence factors of the shafting by building the distributed mass model. And we simulated the control effect of passive vibration absorber and active controller on the lengthways vibration of shafting by the finite element software Patran. Studies indicate that the mass of propeller and attached water have an important influence on the inherent characteristic of shafting. Limited by the mass of absorber, the control effect of passive vibration absorber is less than the active control method. Active control method can get good control effect when the control force is bigger than 50 percent of the exciting force, but the time lag must be taken into account.
Key words:shafting; longitudinal vibration; passive control; active control; time lag
文章编号:1006-0707(2016)01-0023-04
中图分类号:U661.3;TJ8
文献标识码:A
doi:10.11809/scbgxb2016.01.005
作者简介:张阳阳(1989—),男,博士研究生,主要从事舰船振动与噪声控制技术研究;
收稿日期:2015-06-13;修回日期:2015-07-01
