模式简化的OTHR多径航迹融合算法
2016-02-23高火涛宋金文
李 浩,高火涛,宋金文,曹 婷
(1. 武汉大学 电子信息学院, 武汉 430072; 2. 61195部队武汉军事代表室, 武汉 430072)
·仿真技术·
模式简化的OTHR多径航迹融合算法
李 浩1,高火涛1,宋金文2,曹 婷1
(1. 武汉大学 电子信息学院, 武汉 430072; 2. 61195部队武汉军事代表室, 武汉 430072)
针对天波超视距雷达(OTHR)多径传播现象引起的航迹-路径模糊性问题,提出了一种模式简化的OTHR多径航迹融合算法。该算法先对经概率数据互联(PDA)算法滤波所得航迹进行聚类;然后,将同类航迹与简化后的传播模式匹配,加权得到某一关联假设下目标地理状态估计;最后,对所有关联假设下的目标地理状态估计加权融合,得到最终的目标地理状态估计。文中先通过设计仿真实验验证了简化模式的合理性,并对所提算法进行了仿真、测试。结果表明:模式简化后,并未影响多径航迹融合算法融合性能,但算法计算量与复杂度大大降低,并在某些航迹模式缺失的情况下,还能降低算法融合误差,改善融合效果。
多径传播;模式简化;航迹融合
0 引 言
天波OTHR[1]站和目标之间通常存在多条传播路径,导致基于雷达坐标系的跟踪滤波器跟踪一个目标时会输出多条雷达航迹。航迹融合一般包括航迹聚类、航迹关联、航迹状态估计和融合协方差的计算[2]。目前,解决天波OTHR航迹融合问题的算法有:基于多假设的航迹融合算法[3-6]、自适应航迹融合算法[7]、基于拉格朗日松弛算法的航迹融合算法[8]等。这些算法都是采用经典的两层电离层模型,认为雷达与目标间存在四种传播模式,将同一目标的多条航迹与这四种模式关联匹配,实现航迹融合,最终得到目标的地理状态估计。但在航迹完整,特别是在融合多目标的航迹时,这些算法运算量会很大,不利于在工程中应用。
基于以上原因,本文在原有多径航迹融合算法的基础上,将雷达站与目标间的传播模式进行简化,即将通常的四种传播模式简化为三种,这样会大大减少航迹-路径关联假设数。仿真实验表明:模式简化后没有影响算法的航迹融合性能。但算法的计算量与复杂度大大降低,并且在一些航迹模式缺失的情况下,降低了算法的航迹融合误差,改善了融合效果。
1 简化模式
1.1 简化模式思想


(1)
考虑到EF传播模式与FE传播模式,传播路径顺序刚好相反,设想将EF传播模式与FE传播模式合并简化为一种传播模式:EF或FE传播模式。这样,可将经典的两层电离层模型下的四种传播模式:EE、EF、FE、FF,简化为三种传播模式:EE、FF、EF或FE。简化后,可降低航迹融合问题的复杂度。
1.2 简化模式合理性验证
假设目标在平面内做匀速直线运动,目标初始状态为[1100km0.15km/s0.10472rad0.0000872665rad/s],电离层虚高为E层100km,F层220km,雷达积累周期T=20 s,累积周期数为256,雷达发射站与接收站间距为100 m,坐标转换过程中考虑地球曲率的影响。仿真结果如图1和表1所示。
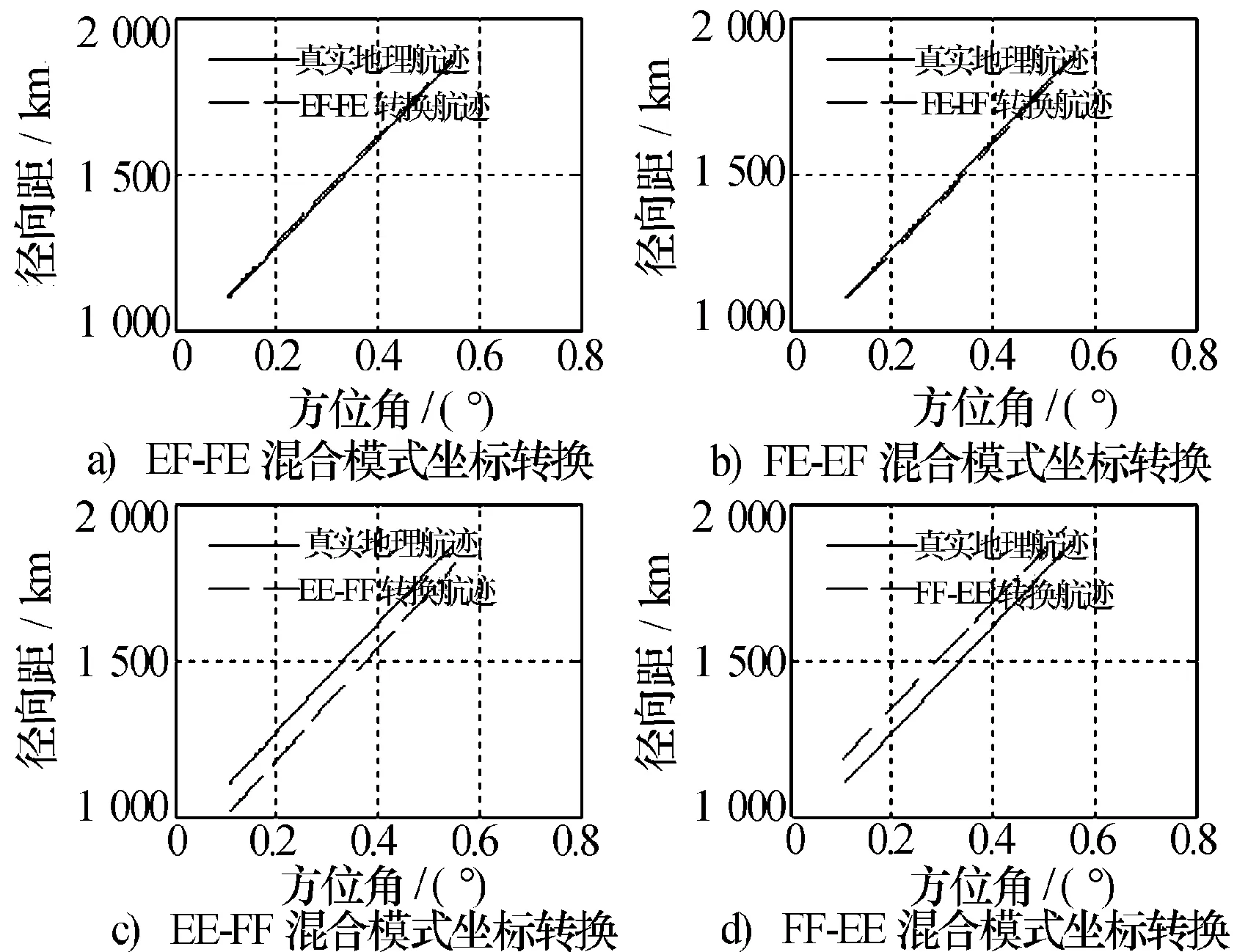
图1 四种混合模式坐标转换
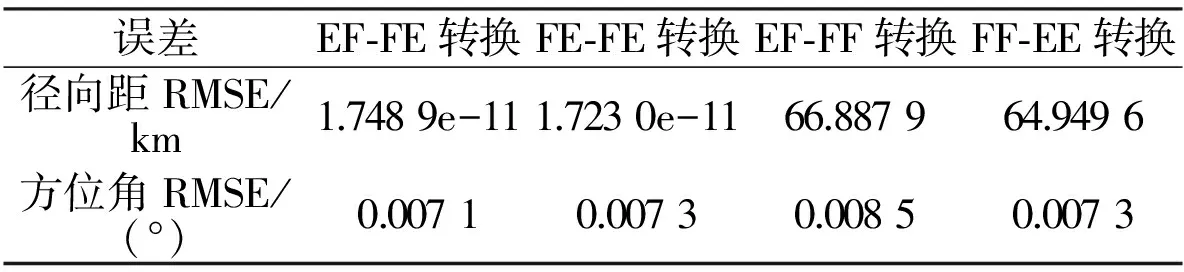
表1 四种混合模式坐标转换均方根误差(RMSE)误差统计
从图1和表1中可以看出,EF-FE或FE-EF混合模式坐标转换方式,径向距RMSE均在10-10km以下,方位角RMSE均在10-2rad以下;而其他混合模式坐标转换方式,如EE-FF,FF-EE等,径向距RMSE太大,均在60 km以上。因此,通过以上仿真实验可验证,将EF与FE传播模式合并简化为一种传播模式,即EF或FE传播模式是合理可行的。
2 融合算法
2.1 航迹聚类

(2)
则判定航迹τi和τj属于同一类,将其加入已形成的分类中或形成新的分类。
2.2 航迹-路径关联假设

2.3 联合评估概率计算

(3)
则与该关联假设对应的地理状态概率密度函数可表示为


(4)

(5)
2.4 地理状态估计更新


(6)
式中:C为归一化因子,具体公式详见文献[3-5]。
3 仿真分析
考虑目标均在平面内做匀速直线运动,选取两层电离层模型,且电离层高度呈正态分布,电离层虚高均值和标准差为:hE=100 km,hF=220 km,σhE=5 km,σhF=10 km,存在四种传播模式。模式简化后,航迹融合过程中考虑EE、EF、FF三种传播模式。雷达量测噪声标准差:径向距σRg=4 km,径向距速率σRr=0.003 km/s,方位角Az=0.003 rad。雷达采样周期T=20 s,采样时间持续600 s,每个周期加入20个杂波点,杂波点在目标运动范围内呈均匀分布。在雷达坐标系下采用PDA[10]算法进行目标跟踪,坐标变换过程考虑地球曲率的影响。
仿真一:交叉多目标模式正常的情形,目标1初始状态为[1 100 km0.15 km/s0.104 72 rad0.000 087 266 5 rad/s],而目标2初始状态为[1200km-0.15km/s0.10472rad0.000 087 266 5 rad/s]。仿真结果如图2所示。
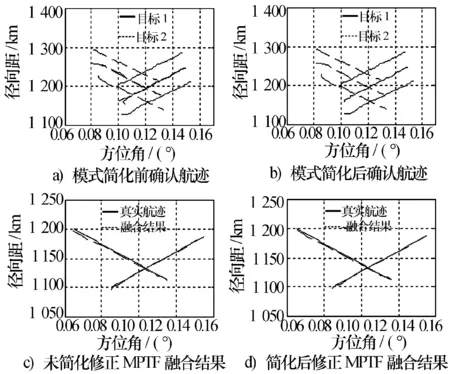
图2 模式简化前后多目标确认航迹与融合结果
仿真二:单目标模式缺失的情形,目标初始状态为[1 100 km0.15 km/s0.104 72 rad0.000 087 266 5 rad/s],其余仿真条件同仿真一。仿真结果如图3所示。
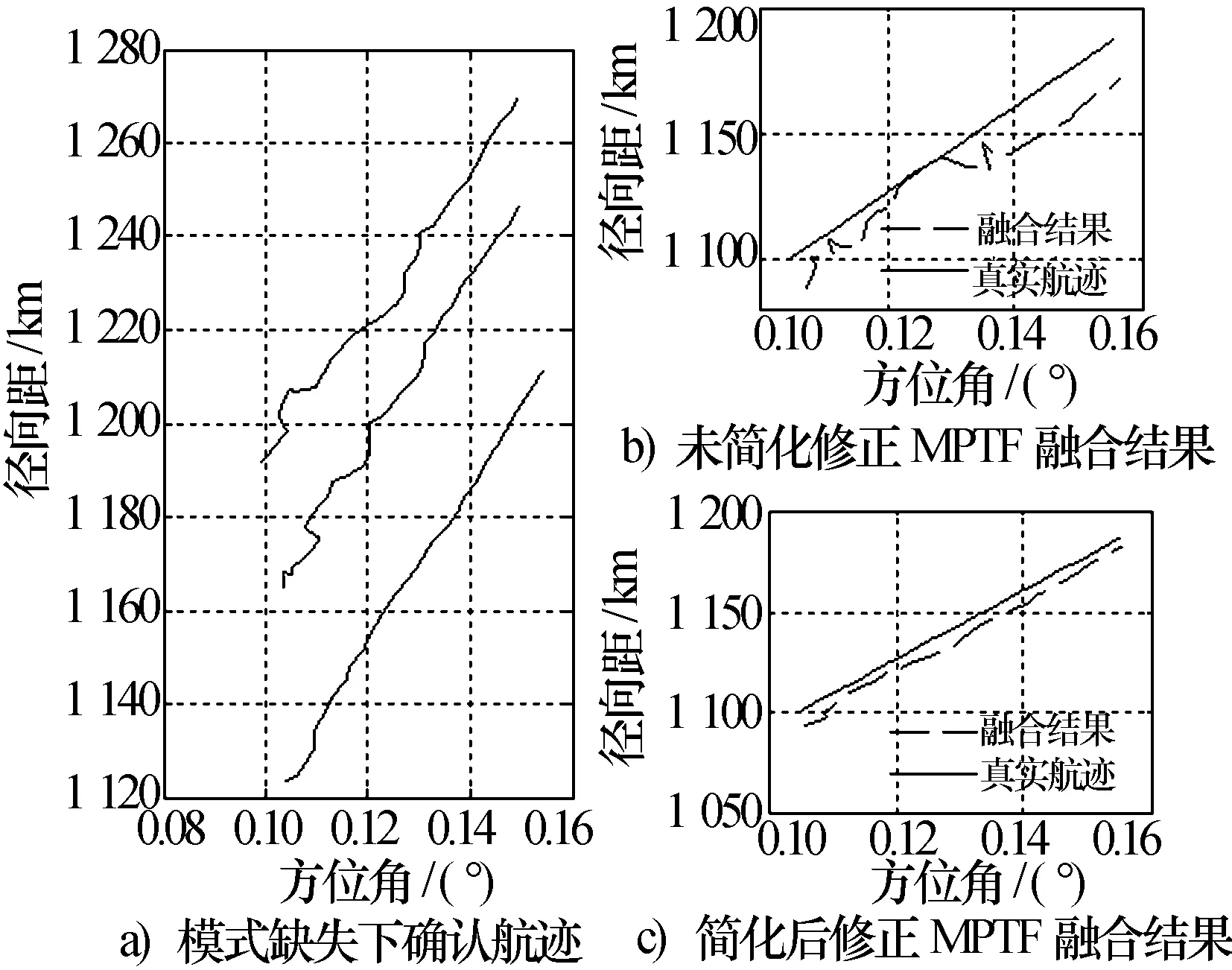
图3 模式简化前后单目标确认航迹与融合结果
从图2~图3和表2~表3中可以看出,在交叉多目标模式正常的情况下,模式简化后,并未影响多径航迹融合(MPTF)算法的航迹融合性能:模式简化前后,径向距RMSE均在1.6 km以下,方位角RMSE均在10-3rad以下,航迹融合效果良好。在单目标模式缺失的情形下,模式简化后,算法的融合航迹径向距RMSE由10 km以上降低到6 km以下,方位角RMSE由10-2rad以下降低到10-3km以下,改善了算法的航迹融合效果。但模式简化后,在两种情形下,算法的航迹融合时间均大大减少,不到未简化前时间的一半。可见,模式简化后,算法的计算量和复杂度大大降低,但算法的航迹融合性能并未受影响。

表2 模式简化前后可行关联假设数D值对比
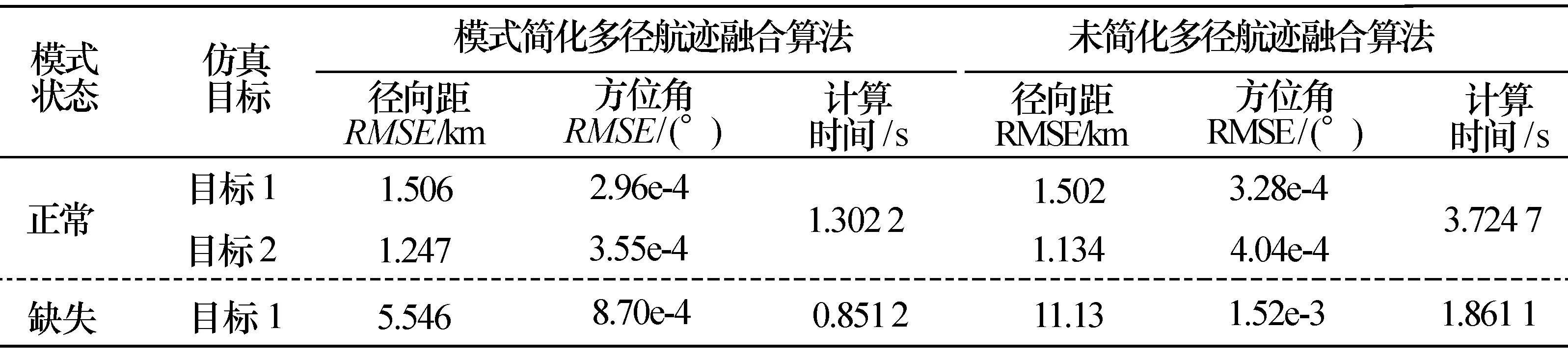
表3 模式简化前后MPTF算法性能比较
4 结束语
针对OTHR多径航迹融合问题,本文提出了一种模式简化的MPTF算法。仿真实验证明,对传播模式进行简化是合理可行的。模式简化后,MPTF算法航迹-路径关联假设数大大减少,使得算法的计算量和复杂度大大降低,但算法的航迹融合性能并未受影响。相反,在一些航迹模式缺失的情形下,模式的简化反而能改善算法的航迹融合效果,降低融合误差。进一步方便了MPTF算法在工程中的应用。
[1] 焦培南. 短波天波超视距雷达可用性评述[J]. 现代雷达, 1991,13(1): 7-14. JIAO Peinan. The review of the usability of HF sky-ave over-the-horizon radar[J]. Modern Radar, 1991, 13(1): 7-14.
[2] 孙 侃,谌 夏. 基于点迹聚类的天波OTHR数据关联方法[J]. 现代雷达, 2011, 33(10): 51-59. SUN Kan, CHEN Xia. Sky-wave OTHR data association method based on track clustering[J]. Modern Radar, 2011, 33(10): 51-59.
[3] PERCIVAL D J, WHITE K A B. Multipath track fusion for over-the-horizon radar[C]// Signal and Data Processing of Small Targets. San Diego, CA, USA: SPIE Press, 1977: 363-374.
[4] PERCIVAL D J, WHITE K A B. Multihypothesis fusion of multipath over-the-horizon radar tracks[C]// Signal and Data Processing of Small Targets. Orlandg, FL: SPIE Press, 1998: 440-451.
[5] PERCIVAL D J, RUTTEN M C. Joint ionospheric and target state estimation for multipath OTHR track fusion[C]// Signal and Data Processing of Small Target. San Diego, CA, USA: SPIE Press, 2001: 118-129.
[6] 王德章, 高火涛, 马文楠, 等. 基于关联假设树的OTHR多径航迹融合算法[J]. 现代雷达, 2015, 37(4): 35-42. WANG Dezhang, GAO Huotao, MA Wennan, et al. A multipath track fusion algorithm based on associated hypotheses tree for OTHR[J]. Modern Radar, 2015, 37(4): 35-42.
[7] 刘慧霞, 梁 彦, 陈绪元,等. 一种自适应天波超视距雷达航迹融合算法[J]. 电子学报, 2009, 37(6): 1348-1352. LIU Huixia, LIANG Yan, CHEN Xuyuan, et al. An adaptive OTHR multipath track fusion algorithm[J]. Acta Electronica Sinica, 2009, 37(6): 1348-1352.
[8] RUTTEN M G, GORDON N J, MASKELL S, et al. Multipath tracking association for over-the-horizon radar using lagrangian relaxation[C]// Signal and Data Processing of Small Targets. Orlando, FL: SPIE Press, 2004: 452-463.
[9] 孔 敏,王国宏,王永诚. 基于球面模型的天波超视距雷达坐标配准法[J]. 现代雷达, 2006,28(5):37-41. KONG Min, WANG Guohong, WANG Yongcheng. A coordinate registration algorithm for over-the-horizon radar based on sphere measurement model[J]. Modern Radar, 2006,28(5): 37-41.
[10] KIRUBARAJAN T. BAR-SHALOM Y. Probabilistic data association techniques for target tracking in clutter[J]. Proceedings of the IEEE, 2004, 92(3): 536-557.
李 浩 男,1990年生,硕士研究生。主要研究方向雷达目标跟踪,软件设计。
高火涛 男,1964年生,教授,博士生导师。主要研究方向新体制雷达系统设计、雷达信息处理。
宋金文 男,1966年生,工程师。主要研究方向通信工程。
曹 婷 女,1990年生,博士研究生。主要研究方向雷达信号处理,目标跟踪。
A Multipath Track Fusion Algorithm for OTHR with Simplified Propagation Modes
LI Hao1,GAO Huotao1,SONG Jingwen2,CAO Ting1
(1. Electronic Information School, Wuhan University, Wuhan 4300372, China) (2. 61995 Troops Stationed Wuhan Military Affairs Delegation, Wuhan 430072, China)
The multipath propagation of sky-wave over-the-horizon radar (OTHR) makes the ambiguity between tracks and propagation modes. A multipath track fusion algorithm for OTHR with simplified propagation modes is proposed. Firstly, the tracks produced by the Probabilistic Data Association (PDA) filter are classified. Next, the target state estimation in ground coordinate under a hypothesis is obtained by associating the tracks in a cluster with simplified propagation modes. Finally, the final target state estimation is obtained by fusion of all the target state estimations under all hypothesizes. In this paper, a simulation experiment is designed to demonstrate the reasonability of simplifying propagation modes. Then, the proposed algorithm is simulated and tested. The results show that the algorithm performance of fusing the tracks is not influenced after simplifying propagation modes. On the contrary, the calculation and complexity of the algorithm is greatly decreased. In addition to this, the state estimation error is decreased under condition of the lack of some propagation modes, compared with the original algorithm.
multipath propagation; simplify propagation modes; track fusion
10.16592/ j.cnki.1004-7859.2016.04.019
国防预研项目(40***01);教育部支撑计划(62***03)
李浩 Email:Late_Li@163.com
2015-11-16
2016-01-18
TN958
A
1004-7859(2016)04-0082-04
