带安全控制的两自由度搬运机械手设计
2016-02-23李红斌徐弈辰
李红斌,徐弈辰
(苏州健雄职业技术学院,江苏太仓215411)
带安全控制的两自由度搬运机械手设计
李红斌,徐弈辰
(苏州健雄职业技术学院,江苏太仓215411)
通过对机械手装置的结构组成和控制系统方案分析,气路及软件设计,介绍一种基于西门子可编程控制器的带安全控制的两自由度搬运机械手,并通过实际交付使用,验证了该系统的稳定性与安全性。
安全控制;两自由度机械手;PLC
机械手由于其具有高度的灵活性和高效性,在很多领域得到了广泛的应用,特别是水平与垂直运动的两自由度机械手,成本低,效率高,在工业当中应用广泛。随之带来的问题便是安全性的问题,机械手安全性包含两个方面,设备运行的本体安全性和对操作者自身的安全性。如何设计高效而又安全的机械手,是工业控制领域中十分强调的问题。本文设计了一种机械手,基于西门子PLC控制,并加配皮尔磁安全继电器与TD400操作屏,操作简单,稳定性强,安全性高。
1系统组成及功能设计[1]
两自由度机械手如图1所示,主要由运动机构与执行机构组成。运动机构包括水平方向与垂直方向的丝杠直线运动机构,分别由两个步进电机驱动;执行机构包括伸缩气缸、抓取气缸和推料气缸。除此之外,在机械手外围设置了安全光栅,建立了机械手动作时的安全环境。

图1 机械手实物图
机械手的工作模式有“手动模式”和“自动模式”,同时还具备“故障报警”功能。一方面,不管是手动模式还自动模式主要动作有运送、抓取及放置,其要求在硬件安全功能无故障的前提下方可实施动作;另一方面,在其动作实施的过程中,一旦遇到特殊情况和障碍的时候,机械手会立即中断工作且有故障报警信息,报警信息包括限位故障报警、手动操作报警及回参考点故障报警。
2控制系统方案及硬件组成
控制系统选用西门子S7-200系列的可编程逻辑控制器对其功能动作进行控制,西门子TD400触摸屏作为人机交互界面,考虑系统对精度要求不高采用步进电机为驱动装置,将气动主要用于机械手臂伸缩和抓取和放置功能的驱动上。在安全控制上采用皮尔磁安全继电器控制,保证系统的安全性。总体控制系统框图如图2所示。
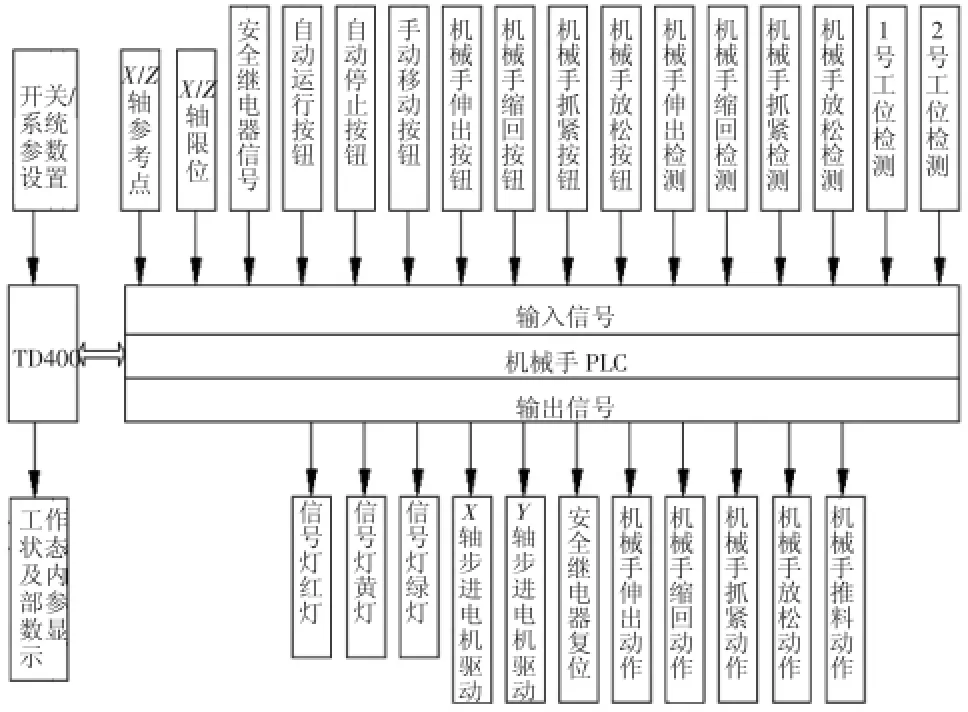
图2 机械手控制系统图
西门子TD400触摸屏一种小型紧凑型设备,是一种低成本的人机界面(HMI),使操作员或用户能够与应用程序进行交互,它为与S7-200CPU进行界面连接提供了必需的组件。TD400设备允许组态一组层级用户菜单,为与应用程序交互提供了另一种结构,使其显示由S7-200CPU中的特定位触发的报警或消息,同时可以查看、监视和更改应用程序固有的过程变量。
PNOZ X3急停继电器是用于紧急停止的安全继电器,带有继电器输出触点:3个安全触点(常开)和1个辅助触点(常闭);可连接急停按钮,安全门按钮和启动按钮;电源电压显示继电器状态显示,能够检测外部保护回路状态。
3安全设计方案[2]
在实际电路中加入了安全继电器,气动压力开关,急停按钮等安全装置,并在机械手外围加上安全光栅及防护罩等一系列的保护措施,确保机械手工作的安全性。在安全功能上设计采用电与气结合的安全保护,安全功能见表1.

表1 安全功能
在安全继电器的应用中采用双通道输入工作方式,如图3双通道输入工作方式接线图所示接电方式在输入回路有重复接线,即-S21与S31皆接入急停按钮触点,当紧急情况下按下急停按钮,其安全输出回路断开,机械手动作停止,起到安全保护的功能。同时双通道输入工作方式能判别输入回路中的接地故障,和按钮之间的短路故障。
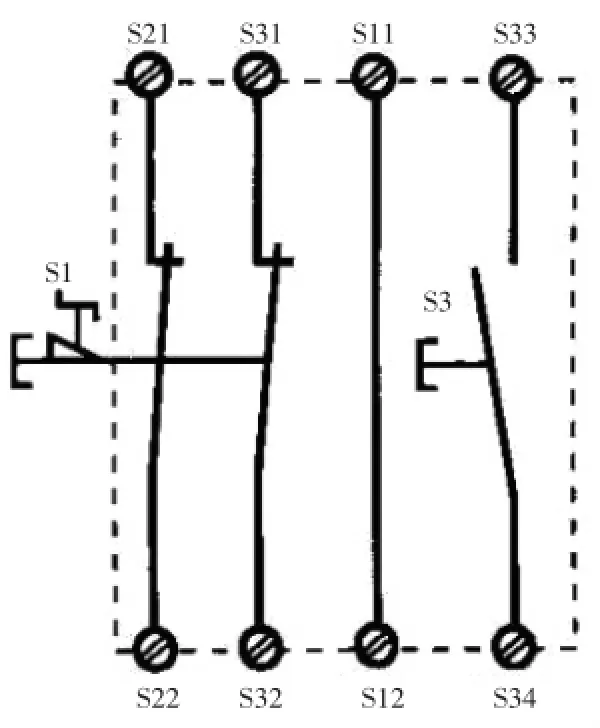
图3 双通道输入工作方式接线图
4气路设计
机械手系统中采用了三个气缸来完成伸缩、抓取和推料的动作,伸缩气缸和抓取气缸是双作用气缸,由两个三位五通的双电控换向阀控制,推料气缸是单作用弹簧复位式气缸,由两位五通单电控电磁阀控制,每个气缸的控制回路都设置了单向节流阀,具体气路控制回路如图4所示。
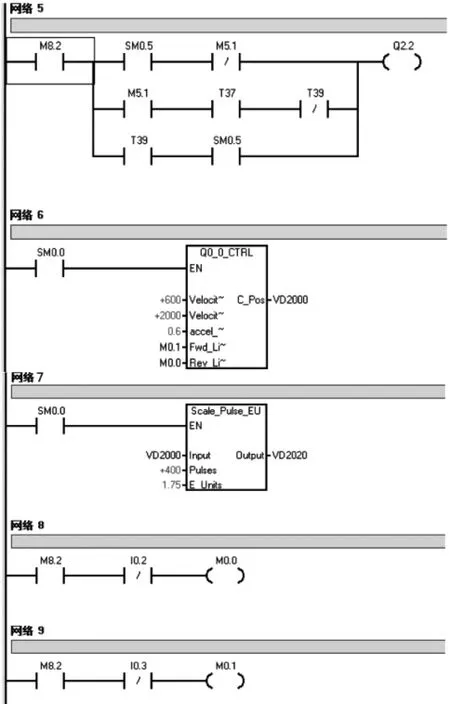
图4 X轴电机驱动控制程序
5系统软件设计
两自由度搬运机械手系统的控制程序使用主程序和子程序编程,包括主程序及手动控制子程序、自动控制子程序和故障报警显示子程序,程序结构清晰明了便于修改。
在主程序中,系统使用主开关-Q1接通。在无故障时紧急-关断-A1将控制主阀门-0V2,使用转换开关-S3将接通控制,只有当控制“接通”时,如果压力开关-0B1显示一个至少5 Pa的额定压力,手动工作和自动工作的工作状态才能激活。
在手动模式下,通过触摸屏可以实现机械手上、下、左、右的点动移动,便于现场的维护与维修控制;自动运行模式可以实现规划路径的循环往复运动。
步进电机的控制采用MAP库功能模块开控制,X轴电机驱动控制程序如图4所示,Q0_0 CTRL为控制X轴的步进电机驱动控制,Q2.2为绿色指示灯,代表电机运行的运行状态,Pulse_EU子程序为变量转换功能块,将脉冲量转换成数字量,并在TD400屏上显示出实时距离。当发生越限报警时,屏幕会显示报警信号,清除错误后可手动使机械手回到初始位置。
6结束语
基于安全控制而设计的两自由度搬运机械手控制系统,克服了传统PLC机械手安全性低等缺点,具有高安全性、平稳性好等优点,能够较好地完成工业现场的搬运任务。该系统在实际的机械手搬运系统中表现出良好的运行性能和安全性。
[1]陆振先,袁凯,曹琼兴.基于PLC的两自由度并联机械手控制系统研究[J].徐州工程学院学报,2014(03):67-71.
[2]关明,周希伦,马立静,等.基于PLC的机械手控制系统设计[J].制造业自动化,2012,34(7):120-122.
[3]胡高峰,李占贤,黄金凤.基于PLC的高速并联机械手控制技术[J].机械工程与自动化,2013(3):147-154.
Design of Two Degree of Freedom Manipulatorw ith Security Control
LIHong-bin,XU Yi-chen
(Suzhou Chien-Shiung Institute of Technology,Taicang Jiangsu 215411,China)
Through the analysis of the structure and the control system of the manipulator device,by pneumatic system and software design,this paper introduces a kind of two degree of freedom manipulator with safety control based on SIEMENSPLC.And the stability and security of the system are verified by practical application.
security control;two degree of freedom manipulator;PLC
TP242.6
A
1672-545X(2016)12-0144-03
2016-09-03
太仓市科技支撑计划(工业)项目(TC2014GY14)
李红斌(1984-),女,广西贺州人,讲师,高级技师,工程硕士,研究方向:自动化控制。
