“高分四号”卫星相机装调中高精度在线测量技术
2016-02-23李凌王昀廖志波阴刚华刘志远
李凌 王昀 廖志波 阴刚华 刘志远
(北京空间机电研究所,北京 100190)
“高分四号”卫星相机装调中高精度在线测量技术
李凌 王昀 廖志波 阴刚华 刘志远
(北京空间机电研究所,北京 100190)
“高分四号”卫星相机由主光学系统(里奇-克莱琴反射系统)和校正光学系统(折射系统)两部分构成。其中主光学系统主反射镜口径710mm,校正光学系统包括可见近红外、中波红外主份与中波红外备份三个光路。主镜组件调心与系统装配是相机装调工作的重要环节,传统的调心方法需要与主镜口径相匹配的高精度转台,不仅条件保障昂贵且调心周期长;基于结构孔位定位的装配方法也无法适应相机光路多,结构复杂紧凑的特点。因此“高分四号”卫星相机装调工作中引入了高精度在线测量技术,文章介绍了该技术在主镜组件调心与系统装配两个环节里的应用案例。通过引入激光跟踪仪、关节臂测量仪和点云拟合算法,提高了主镜组件调心速度,且调心后角度失调量优于 10",平移失调量优于0.1mm;借助关节臂测量仪则将系统装配工作的精度提高到 10-2mm量级,较传统装配方法有两个数量级的提升。相机完成装调后,地面各支路调制传递函数测试均满足研制要求,在轨成像优异。文章所论述的相关技术可为后续同类相机的研制提供参考。
装调 在线测量 关节臂测量仪 激光跟踪仪 高分辨率相机
0 引言
虽然近年来随着光学设计软件的发展,大口径相机光学系统的设计越发成熟[1],但大口径相机的装调却非常困难[2-5]。就“高分四号”卫星相机而言,装调难点主要体现在主次镜面形控制、检测主镜组件的零重力面形和系统的零重力波前误差、主镜组件的调心以及提高全系统装配精度。主次镜面形主要通过多种工艺手段加以控制,从而减少各种应力对镜子面形的影响;主镜零重力测试采取了光轴水平旋转测试和光轴竖直测试两种方案;相机系统的零重力波前误差测试采用了光轴竖直方案并专门研制了竖直检测塔;主镜组件的调心包括主承力结构轴与主镜光轴的平行装调和主镜顶点相对结构中心的偏离修正。调心是相机装调工作中的重要环节,随着相机口径的增大,传统调心方法的条件保障越发困难和昂贵,且频繁的转运也增加了工作风险,因此寻求新的调心方法尤为迫切;较高的系统装配精度是后续系统精调的基础,传统装配主要通过机械孔位限位,精度为毫米量级,已无法适应“高分四号”卫星相机结构复杂、装配公差严的特点,因此需要设法提高相机的装配精度。激光跟踪仪与关节臂测量仪等测量系统具有精度高、量程大、可在线工作的特点,随着这类技术的不断发展,为解决上述问题提供了新的思路。本文介绍了基于高精度在线测量技术的主镜组件调心与系统装配方法,详细阐述了其应用背景、实施步骤与应用效果。
1 “高分四号”卫星相机装调简介
“高分四号”卫星相机的光机结构见图 1,相机可以分为主光学(反射系统)和校正光学(透射系统)两部分。主光学采用里奇-克莱琴主光学系统(Ritchey-Chretien System,RC),口径 710mm;校正光学将主光学出射光分为可见近红外支路和中波红外主份/备份支路。其中可见光近红外谱段在分色片的前表面反射进入该谱段校正镜组,并通过滤光轮实现不同工作谱段的切换,覆盖波长0.45μm~0.9μm,中波红外谱段则透射过分色片,进入该谱段校正镜组(包括中波红外一次校正镜组、中波红外二次校正镜组I和中波红外二次校正镜组II),并通过切换镜实现主份/备份光路的切换,覆盖波长3.5μm~4.1μm。
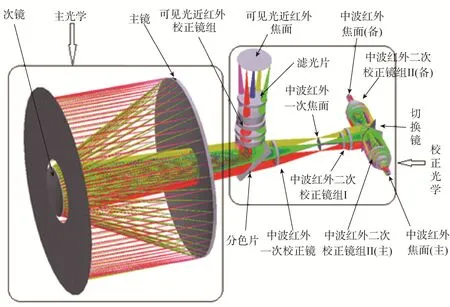
图1 “高分四号”卫星相机光机结构Fig.1 The optical and mechanical structure of GF-4 camera
“高分四号”卫星相机装调分为部组件装调、系统装调、地面测试三个阶段。见图 2,部组件装调阶段主要包括RC主光学、可见近红外支路、中波红外支路三个部组件的单独装调;系统装调阶段则是多光路装调的集成阶段;地面测试阶段主要对各支路成像性能进行评估。
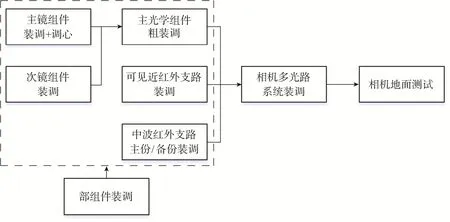
图2 相机装调流程Fig.2 The flowchart of assembly and adjustment for GF-4 camera
2 基于高精度在线测量技术的“高分四号”卫星相机装调方法
2.1高精度在线测量技术应用背景
在线测量顾名思义就是在生产线上进行测量,具体到装调工作中,就是在装调生产现场进行高精度测量辅助装调,从而避免频繁转运,提高装调精度、缩短装调周期。激光跟踪仪和关节臂测量仪是具有代表性的高精度在线测量仪器:激光跟踪仪是一台以激光为测距手段配以反射标靶的仪器,它同时配有
绕两个轴转动的测角机构,是一个完整的球坐标测量系统[6-7]。以 Leica AT401为例,测量精度可达(15µm+6µm)/m,关节臂测量仪也称便携式三坐标测量仪,是一种新型的非正交式坐标测量机。它以角度基准取代长度基准,将多个杆件和单个测头通过旋转关节串联连接,一端固定,另一端(测头)在空间自由运动[8,9],构成一个球形测量空间。1.2m臂长的关节臂,单点重复精度优于10µm。
本文主要介绍高精度在线测量技术在主镜组件调心工作与系统装配工作中的应用:
主镜组件调心工作的目的是把结构基准(主承力的机械轴)与主镜组件光轴调平行并修正主镜光轴的中心偏(即通过调节主镜平移,实现主镜光轴顶点与主承力结构基准中心的对准)。传统主镜调心一般将主镜组件摆上高精度转台,并配合使用百分表,定心仪观察主镜光轴与转台转轴的晃动量测算调心量。该方法需要高精度的转台,对转轴与转动面的垂直度误差以及转动面的水平度误差都有严格的要求,且随着主镜口径的增大,转台的尺寸与质量也必须增大,研制成本和维护成本都迅速上升[10-14]。鉴于此背景,“高分四号”卫星相机装调过程中采用了基于激光跟踪仪、关节臂测量仪的自准直调心方法,该方法用自准直法引出光轴,用点云拟合算法计算机械轴和光轴的矢量,并解析两轴平行失调量,另外该方法用光学方法引出了主镜中心坐标,借助关节臂测量仪修正中心偏。
系统的装调可按工序分为系统装配和系统精调:系统的装配工作在现有工艺上一般依靠结构连接孔位进行定位,装配精度在mm量级;系统的精调工作是借助干涉测量法和计算机辅助装调技术收敛失调量的过程[15-17],该阶段一般可将相机失调量收敛到 10-4mm量级。毫米量级的装配精度,可能使得系统各组件空间位置的累积误差过大,导致系统波前误差超出干涉仪测量量程。对于结构较简单的相机系统可以尝试调节各组件位置,必要时用三坐标对各组件位置进行辅助定位,逐步收敛装配精度到干涉仪量程内。“高分四号”卫星相机光机结构复杂,且有三个工作支路,装配的累积误差很难在后期修正回来。另外由于紧凑的结构特点,也无法借助三坐标对各部组件进行定位,再考虑到“高分四号”卫星相机装调周期短,必须设法提高装配精度和装配效率,从而保证装配后可直接进入精调阶段。借鉴在线测量系统在飞机汽车制造领域的应用[18-19],“高分四号”卫星相机装配过程中借助关节臂测量仪将系统装配的精度提高到10-2mm量级,完成装配后系统失调量小,直接进入干涉仪量程范围内。
2.2 在主镜组件调心中的应用
本文提出的采用激光跟踪仪和点云拟合算法辅助的调心方法,是在光学干涉测量尺度上引出光轴,并可通过算法实时解析失调量,具有精度高、可在线测试装调的特点。本方法的流程参见图 3,其中需要特别注意的是,图3流程1中还需借助自准直系统特性收敛主镜-补偿镜系统的平移倾斜失调量,实现主镜与补偿镜的光轴重合;流程4中的点云拟合算法是该调心方法的重要辅助算法,下文将予以详细介绍;流程8中,需要借助关节臂测量仪修正主镜光轴中心偏。
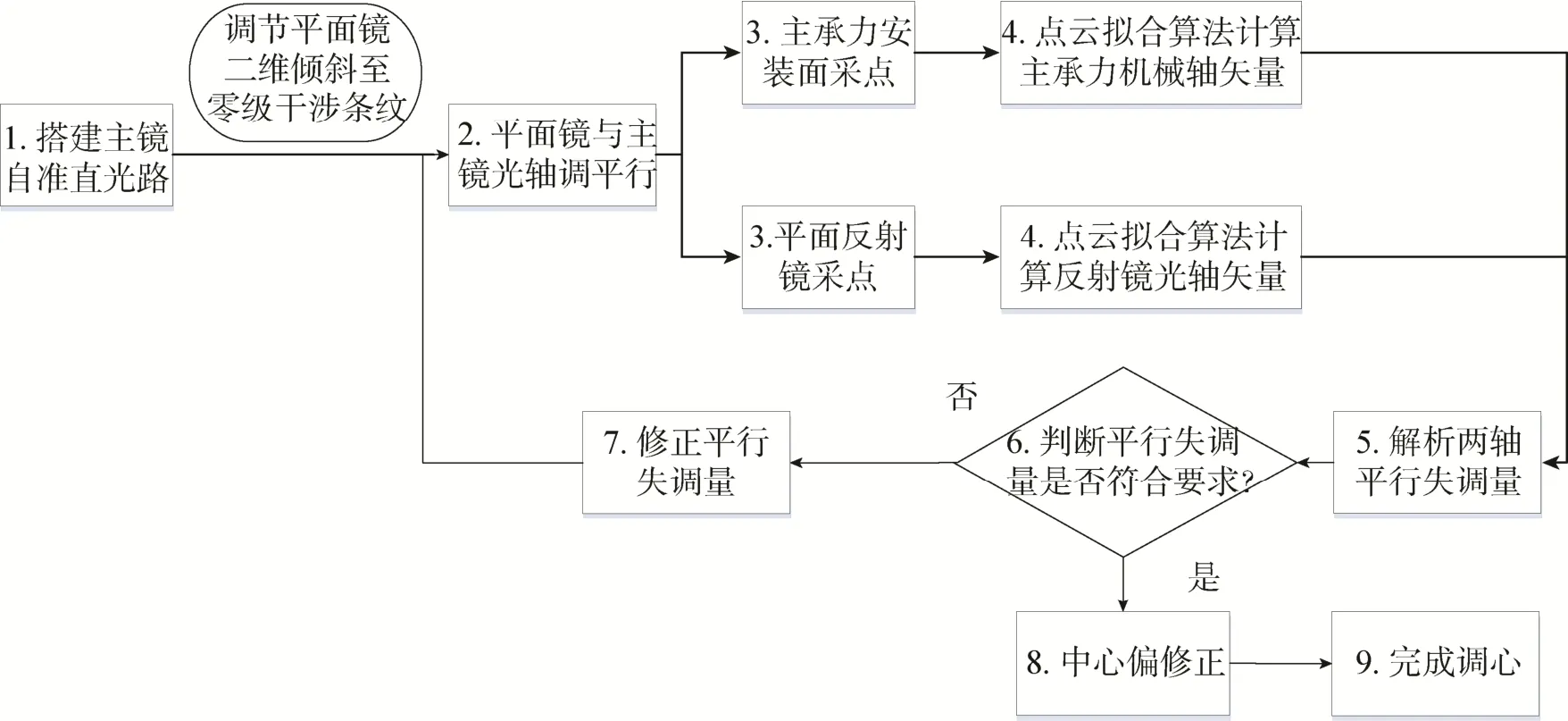
图3 主镜组件调心流程Fig.3 The flowchart of main mirror centering
点云是测量仪器测得待测表面点数据的集合。用激光测距仪可测得的平面反射镜表面点云与主承力结构安装表面点云,点云中的每个点包括其三维坐标(x, y, z)。本例中被测表面都为平面,解析几何中平面方程一般表述为:

式中 A、B、C、D为平面方程参数,为实数且A、B、C不全为0。另外由该方程定义可知,A、B、C为该平面法线矢量的方向余弦,因此可将平面法线矢量m表述为:

为拟合平面方程,假设C不为0,平面方程(1)可整理为:

由最小二乘法定义可给出:


式(5)展开后可得线性方程式:

利用从激光跟踪仪导出的平面镜点云与主承力点云,分别求解式(6)后,根据式(1)、式(2)、式(3)可解出平面镜的法线矢量和主承力的法线矢量。
解析几何中,两个矢量的夹角公式为:

式中 m1, m2为待求夹角的两个矢量;A1,B1,C1为矢量m1的方向余弦;A2,B2,C2为矢量m2的方向余弦。通过式(7)可求出平面镜的法线矢量与主承力的法线矢量的夹角,即机械轴与光轴的平行失调量。
2.3 在系统装配中的应用
系统装配的方法和步骤的选择取决于各部组件在系统中的公差分配情况。就“高分四号”卫星相机而言,通过对相机光学模型蒙特卡洛分析,主光学的次镜公差最严,倾斜2",平移5μm;可见近红外支路整体公差次之,倾斜40",平移0.05mm;中波红外支路整体的公差较松,倾斜2′,平移0.2mm。可见,“高分四号”卫星相机各部组件在系统中的公差最松的都在10-1mm量级,公差较严的在10-3mm量级,再考虑“高分四号”卫星相机结构复杂紧凑的特点,单独用机械孔位定位的装配精度已经无法满足相机的装调需求。
因此,系统装配采用基于关节臂测量仪的方案:主光学与可见近红外支路直接以主承力结构作为装配基准,装配精度由关节臂测量的直接误差决定;中波红外支路以可见近红外支路结构作为装配基准,该支路的装配基准相对主承力结构基准经过了一次基准传递,精度较可见近红外支路和主光学有所下降,该精度由关节臂测量的线性传递误差决定。
关节臂测量仪的误差分为系统误差和随机误差,以本例使用的关节臂测量仪为例,1.2m臂长,系统误差优于10μm;随机误差则由标准误差的无偏估计给出。

式中 σ有偏为随机误差的有偏估计;ti为第i次测量结果;为n次测量结果的算术平均值。

式中 σ无偏为随机误差的无偏估计;kσ为贝塞尔修正系数,是测量次数n的函数,当n=50时,修正量为1.005 1。
如果在装配过程中涉及基准传递,建立空间模型时应考虑误差传递,随机误差的误差传递公式可表述为:

式中 tk为对第k个待测量的测量结果;f为待求量,是t1,t2,…,t3的函数,可通过k个待测量的测量结果间接求得;σ为f的随机误差;σtk为tk的随机误差。由于本例中的空间点坐标的误差传递为线性传递(对于中波红外支路而言,它对主基准的位置是通过可见近红外支路对主基准的位置和中波红外支路对可见近红外支路位置加和求得),因此式(10)可推导为:

次镜与可见近红外支路的装配直接以主承力做装配基准,关节臂采点的坐标误差在 置信水平下为0.01mm ± 0.006mm,其中0.01mm为测量系统重复精度,0.006mm由式(8),式(9)得出,为长期经验随机误差。因此次镜与可见近红外支路装配的平移失调量可收敛到 0.016mm内,角度失调量可收敛到15"内,可以满足可见近红外的装配公差,但次镜的公差较严,因此在次镜组件和可见近红外支路装配完成后,需要搭建干涉检测光路,并借助计算机辅助装调技术将次镜平移失调量收敛到 10-4mm量级,角度失调量收敛到 1"以内。中波红外支路装配时,由式(11)可得,2σ置信水平下,平移失调量可收敛到0.023mm内,角度失调量可收敛到24"内,满足该支路的装配公差。
3 高精度在线测量技术在“高分四号”卫星相机装调中的应用结果
3.1 高精度在线测量系统在主镜调心中的应用结果
“高分四号”卫星相机主镜组件调心以主承力面作为Z轴基准面,围绕主镜外沿在主承力安装面上采集8个点,平面反射镜以九宫格方式采集9个点。调心前点云数据见表1,经matlab拟合后得到两个拟合平面(见图 4),拟合得到的主承力安装面法线矢量 m1=(0,0,1),平面镜表面法线矢量m2=(- 0.000 4936,0.0001887,-0.9999999),将拟合结果代入式(7)求得机械轴与光轴平行失调量为108"。调心后数据见表 2,平面镜表面法线矢量调整到 m2=(- 0.000 0295,0.000 0312,-1),代入式(7)求得机械轴与光轴平行失调量8.98",满足10"要求。
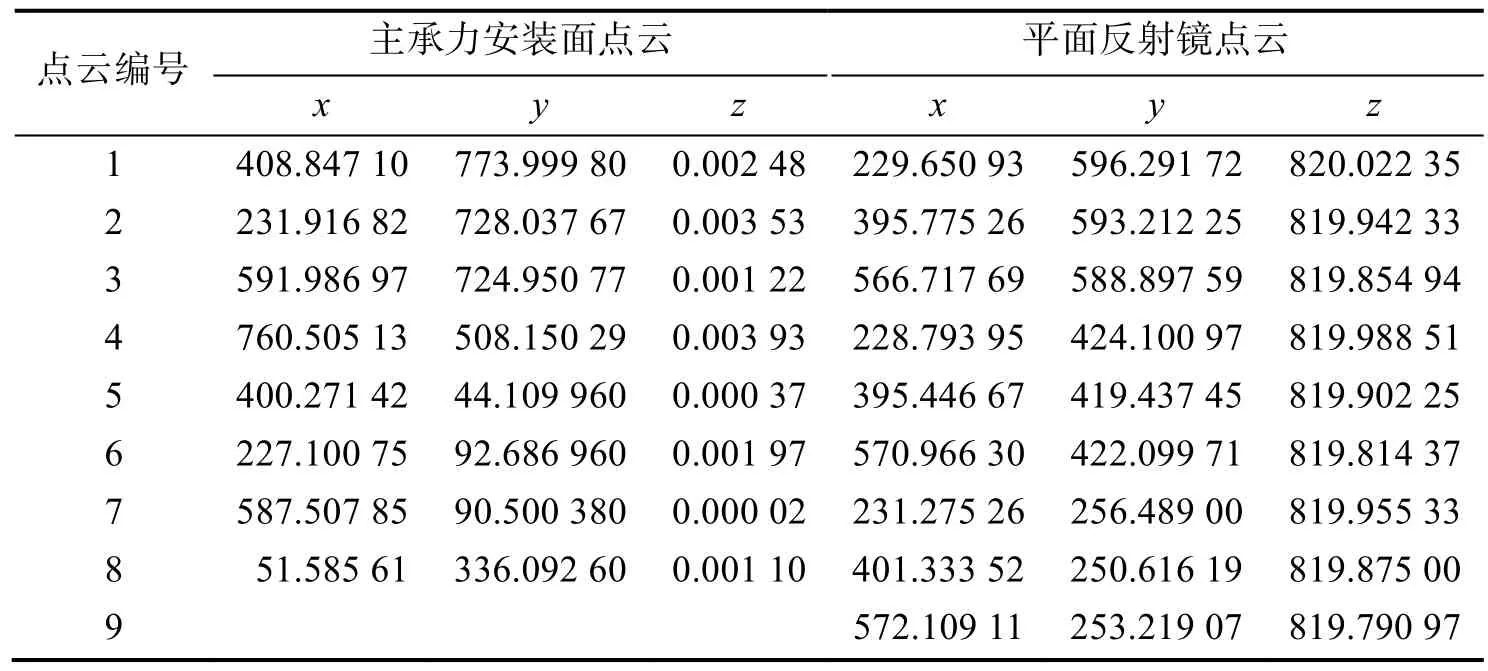
表1 主镜调心前点云数据Tab.1 The dot-cloud data before main mirror centering mm
完成机械轴与光轴的平行调整后,可用关节臂测量仪检查补偿镜结构中心和主承力安装基准中心的中心偏,并适当修正。采用补偿镜结构中心代替主镜光轴中心是因为补偿镜装框时定过心,其结构心就是补偿镜光轴心;另外在搭建上述自准直光路时,已经完成补偿镜光轴与主镜光轴的共心调整。经修正后,主镜偏心小于0.1mm,可满足公差分配0.6mm的要求。主镜组件调心通过借助激光测距仪与关节臂测量仪等在线测量系统与点云拟合算法,使得失调量、调整量可即时得到,失调量的收敛速度大大提高,“高分四号”卫星相机主镜组件调心工作仅用一天即完成,保品质的前提下缩短了相机的研制周期。
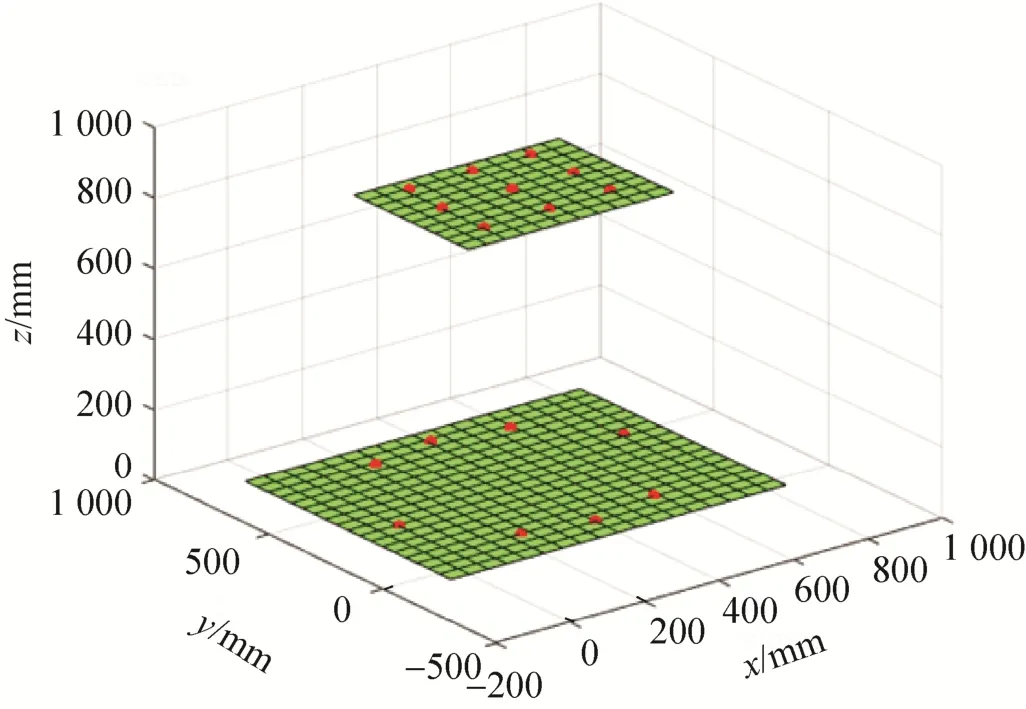
图4 调心前点云拟合算法拟合结果Fig.4 The plane fitting results of dot-cloud data before main mirror centering

表2 调心后点云数据Tab.2 The dot-cloud data after main mirror centering mm
3.2 高精度在线测量系统在系统装配中的应用结果
由于较高的装配精度,相机可见近红外支路装配完成后,主光学与该支路各部组件的空间位置误差在0.016mm内,角度精度在15"内,该支路的波前误差已控制在0.6个波长(波长为632.8nm)以内,处于干涉仪量程内,并满足对次镜失调量建立量化模型的精度。完成次镜的精调后,可见近红外支路波前误差为0.05个波长(波长为632.8nm);中波红外支路装配精度已经满足该支路主份备份的公差分配,因此装配完成后不需要精调,主份备份调制传递函数均超过0.32。
通过借助高精度在线测量系统,系统装配的效率也显著提高,可见近红外支路装配当天即可进入精调阶段;中波红外支路主份备份装配精度满足公差分配要求,因此该支路主份备份装配当天即同时完成了装配与精调工作。
4 结束语
随着相机口径的增大,结构复杂度的提升,相机装调与条件保障也更加困难。高精度在线测量技术和配套算法在相机装调中的角色也越来越重要。在此背景下,本文介绍了高精度在线测量技术在“高分四号”卫星相机装调中的应用情况:提出了一种基于激光跟踪仪、关节臂测量仪的自准直调心方法,实践证明,这种定心方法具有精度高(光轴与机械轴的角度失调量在 10"以内,主镜光轴中心与主承力基准中心的平移失调量小于0.1mm)与速度快(主镜组件调心周期1天)的特点;还介绍了基于关节臂测量仪的相机装配方法,把原来基于机械孔位限位 mm量级的装配精度提高到了基于关节臂测量仪的10-2mm量级的装配精度,克服了相机结构紧凑、公差严的困难,装配后的相机系统失调量小,可见近红外支路可直接进入干涉仪测量范围,进行系统精调,完成精调后该支路调制传递函数超过0.31;中波红外支路无需精调,装配后调制传递函数超过0.32。
References)
[1]陈晓丽, 傅丹鹰. 大口径甚高分辨率空间光学遥感器技术途径探讨[J]. 航天返回与遥感, 2003, 24(4): 19-24. CHEN Xiaoli, FU Danying. Solutions for Space Optical Remote Sensor with Large Aperture and Ultrahigh Resolution[J]. Spacecraft Recovery & Remote Sensing, 2003, 24(4): 19-24. (in Chinese)
[2]刘湃, 黄巧林, 杨居奎. 大口径长焦距相机主次镜支撑结构方案初步研究[J]. 航天返回与遥感, 2014, 35(3): 60-67. LIU Pai, HUANG Qiaolin, YANG Jukui. Research on Support Structure between Primary and Secondary Mirror in Large-aperture and Long-focal-length Space Camera[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(3): 60-67. (in Chinese)
[3]尤锐, 王晶, 王文革, 等. 大口径测量系统主反射镜装调及精度分析[J]. 长春理工大学学报(自然科学版), 2008, 31(3): 20-23. YOU Rui, WANG Jing, WANG Wenge, et al. Adjustment and Error Analysis of the Large Mirror of Test System[J]. Journal of Changchun University of Science and Technology, 2008, 31(3): 20-23. (in Chinese)
[4]韩娟, 段嘉友, 陈建军, 等. 大口径望远系统中主次镜系统的装调方法[J]. 中国激光, 2012, 39(7): 231-236. HAN Juan, DUAN Jiayou, CHEN Jianjun, et al. An Alignment of Primary and Secondary Mirrors for Optical System in Large Telescopic[J]. Chinese Journal of Lasers, 2012, 39(7): 231-236. (in Chinese)
[5]张向明, 姜峰, 孔龙阳, 等. 卡塞格林系统光学装调技术研究[J]. 应用光学, 2015, 36(4): 526-530. ZHANG Xiangming, JIANG Feng, KONG Longyang, et al. Research on optical alignment technology for Cassegrain system[J]. Journal of Applied Optics, 2015, 36(4): 526-530. (in Chinese)
[6]刘娇月, 杨聚庆, 董登峰, 等. 激光跟踪仪的光电瞄准与定位系统[J]. 光学精密工程, 2015, 23(6): 1558-1564. LIU Jiaoyue, YANG Juqing, DONG Dengfeng, et al. Optoelectronic Aiming and Orientation System of Laser Tracker[J]. Optics and Precision Engineering, 2015, 23(6): 1558-1564. (in Chinese)
[7]甘霖, 李晓星. 激光跟踪仪现场测量精度检测[J]. 北京航空航天大学学报, 2009, 35(5): 612-614. GAN Lin, LI Xiaoxing. Site Measuring Accuracy Testing of Laser Tracker[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(5): 612-614. (in Chinese)
[8]马骊群, 曹铁泽, 王继虎, 等. 便携式坐标测量系统在航空发动机关键部件检测中的应用[J]. 计测技术, 2008, 28(6): 9-19. MA Liqun, CAO Tieze, WANG Jihu, et al. Application of Portable CMM to Aero-engine Components Inspection[J]. Metrology & Measurement Technology, 2008, 28(6): 9-19. (in Chinese)
[9]周爱国, 周飞, 吕刚, 等. 关节臂式坐标测量机的运动学与工作空间分析[J]. 机械传动, 2015, 39(1): 48-51. ZHOU Aiguo, ZHOU Fei, LYU Gang, et al. Kinematics and Workspace Analysis for Articulated Arm Coordinate Measuring Machine[J]. Journal of Mechanical Transmission, 2015, 39(1): 48-51. (in Chinese)
[10]陈钦芳, 徐昌杰, 王青松. 抛物面反射镜光轴的确定[J]. 应用光学, 2008, 29(2): 225-229. CHEN Qinfang, XU Changjie, WANG Qingsong. Alignment for Optical Axis of Parabolic Mirror[J]. Journal of Applied Optics, 2008, 29(2): 225-229. (in Chinese)
[11]杜洋, 高志山. 使用高精度三坐标测量仪实现透镜定中心[J]. 光学精密工程, 2015, 23(2): 639-644. DU Yang, GAO Zhishan. Lens Centering Using High-precision Three Coordinate Measuring Machine[J]. Optics and Precision Engineering, 2015, 23(2): 639-644. (in Chinese)
[12]韩娟, 段嘉友, 张钧. 大口径非球面主反射镜的装调方法研究[J]. 应用光学, 2012, 33(3): 490-495. HAN Juan, DUAN Jiayou, ZHANG Jun. Alignment Method for Large Aperture Aspheric Mirror[J]. Journal of Applied Optics, 2012, 33(3): 490-495. (in Chinese)
[13]SUBRAHMANYAM D, KUIAKOSE S A, KUMAR P, et al, Design and Development of the Cartosat Payload for IRS P5Mission[C]//Multispectral, Hyperspectral, and Ultraspectral Remote Sensing Technology, Techniques, and Applications, Goa: Proc. of SPIE, 2006.
[14]TAKANORI I, HARUYUKI I, YUJI O, et al. Advanced Land Observing Satellite (ALOS): Development and On-orbit Status[J]. The Journal of Space Technology and Science, 2008, 23(1): 1-13.
[15]CABEZ A I, PRADIER A. Dimensional Stability Verification of an Optical Bench for Space Applications under Thermal Vacuum Environment[C]//Spacecraft Structures, Materials and Mechanical Engineering, Noordwijk: ESA, CNES and DARA, 1996.
[16]JEAN L, LUC F. The High Resolution Optical Instruments for the Pleiades HR Earth Observation Satellites[C]//7th International Conference on Space Optics, France: ESA, 2008.
[17]孙敬伟, 陈涛, 王建立, 等. 主次镜系统的计算机辅助装调[J]. 光学精密工程, 2010, 18(10): 2156-2163. SUN Jingwei, CHEN Tao, WANG Jianli, et al. Computer-aided Alignment for Primary and Secondary Mirrors[J]. Optics and Precision Engineering, 2010, 18(10): 2156-2163. (in Chinese)
[18]马政伟, 李卫东, 万敏, 等. 飞机侧壁部件装配调姿机构的设计与分析[J]. 北京航空航天大学学报, 2014, 40(2): 280-284. MA Zhenwei, LI Weidong, WAN Min, et al. Design and Analysis of Flexible Fixture for Aircraft Side Panels[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2): 280-284. (in Chinese)
[19]刘霜. 工业现场新型6D大尺寸自动化测量技术[J]. 航空制造技术, 2012, (11): 100-101. LIU Shuang. New 6D Automatic Measurement Technology for Large-scale Work Field[J]. Aeronautical Manufacturing Technology, 2012, (11): 100-101. (in Chinese)
High Precision Online Measurement Technology in Assembly and Adjustment of GF-4 Camera
LI Ling WANG Yun LIAO Zhibo YIN Ganghua LIU Zhiyuan
(Beijing Institute of Space Mechanics and Electricity, Beijing 100190, China)
GF-4 camera includes reflection system(Ritchey-Chretien System) and refraction System. The diameter of main mirror in reflection system is 710mm. The main light path is divided into 3 branches by the refraction system, which are visible/near-infrared branch, primary mid-infrared branch and backup mid-infrared branch. Because of the large diameter, short work cycle and complex structure, the traditional methods are not fit the assembly and adjustment of GF-4 camera. The paper describes an application solution of laser tracker and measuring arm, which significantly shortens the work time and increases the assembly precision. By testing on the ground, the result of MTF (Modulation Transfer Function) testing completely meets the requirements. The imaging in-orbit is also good. The technology described in the paper will be useful for the development of other similar cameras.
assembly and adjustment; online measurement; measuring arm; laser tracker; high-resolution camera
V465
: A
: 1009-8518(2016)05-0077-09
10.3969/j.issn.1009-8518.2016.05.009
2016-07-27
李凌,男,1986年生,2012年获北京航空航天大学光学工程专业硕士学位,工程师。主要研究方向为光学遥感相机装调与测试。E-mail: lilingalpha@163.com。
(编辑:刘颖)
国家重大科技专项工程
