存在观测站位置误差的转发式时差无源定位
2016-02-22朱颖童董春曦刘松杨董阳阳赵国庆西安电子科技大学电子信息攻防对抗与仿真技术教育部重点实验室西安710071
朱颖童, 董春曦, 刘松杨, 董阳阳, 赵国庆 西安电子科技大学 电子信息攻防对抗与仿真技术教育部重点实验室, 西安 710071
存在观测站位置误差的转发式时差无源定位
朱颖童*, 董春曦, 刘松杨, 董阳阳, 赵国庆 西安电子科技大学 电子信息攻防对抗与仿真技术教育部重点实验室, 西安 710071
无源定位中,由于观测站安放在运动平台等原因造成的观测站位置误差会影响无源定位精度性能。另外到达时间差(简称时差)(TDOA)的转发式测量需要将不同观测站截获到的辐射源信号都转发到同一位置,如主观测站。针对这两个问题,提出了基于约束总体最小二乘(CTLS)的无源定位算法。首先将转发式时差的非线性定位方程转化为不需要中间变量的直接线性方程,再基于CTLS算法依次转化为约束优化问题和无约束优化问题,最后推导给出定位近似闭式解。仿真实验表明在观测站误差较大时,该算法与其他算法相比定位精度性能较好。
无源定位; 到达时间差(TDOA); 观测站位置误差; 约束总体最小二乘(CTLS); 近似闭式解
无源定位具有作用距离远,安全隐蔽性能好,获取信息多而准等优势,是电子对抗的一个重要的研究方向。无源定位问题是非线性问题,在解决该问题时需要克服有偏差、计算量大等困难,因此虽然数据量不是很大,但如何能够通过简单的计算或迭代得到高精度的估计结果,一直以来都得到了广泛而深入的研究。多站时差定位以其全面、精确、实时性好的优势在现代定位中得到了广泛的应用。随着技术的发展,无源探测设备已经被安装在飞机、侦察卫星、无人驾驶飞机等运动平台上[1],这些运动平台自身的位置估计会存在误差,因此会影响无源时差定位的性能。
文献[2]指出测量时差的方法大致分为两种:一种是采用同步时钟的方式在不同位置分别测量信号某一特征点的时间再相减;另一种是将信号转发到同一位置,比较它们相对移动多长时间后最相像。为了描述简便,在这里把第1种时差称为基于同步时钟的差分式时差,第2种时差称为转发式时差。相关的讨论无源时差定位的论文所用到的时差都是假定基于前一种方法得到。文献[2]指出后一种方法测量得到的转发式时差具有更高的精度。文献[3]给出的根据相位估计时差算法以及时差测量精度分析是基于将不同观测站将截获到的辐射源信号转发到同一接收机的场景。因此通过转发和测量得到转发式时差是辐射源信号直接辐射到主观测站所需时间与经过副观测站转发到达主观测站所需时间之差。不存在观测站位置误差时,因为可以确切得到主副观测站之间距离差,所以两种方法的时差可以相互无误差转换。但是当存在观测站位置误差时,两种方法的时差相互转换时会引入观测站位置误差,因此利用第2种方法得到的时差进行无源定位时需要针对观测站位置误差设计特定的定位模型和算法。
目前考虑观测站位置误差的无源时差定位主要包括文献[4-9],其中文献[4-6]基于两步加权最小二乘法(Two-stage Weighted Least Squares (WLS))进行改进,文献[7-9]基于约束总体最小二乘(CTLS)法进行改进。这两类算法虽然在估计中间变量时考虑了观测站位置误差,但由中间变量估计最终定位结果时仍会受到主观测站位置误差的影响。因此考虑直接可以得到定位结果的模型,文献[10]首次提出无需中间的定位模型来分析多径效应对定位的影响。文献[11]利用该模型,将定位问题最终转化为广义Rayleigh商问题,通过广义特征值分解来求解辐射源位置,该算法并未考虑观测站位置误差。文献[11-13]都是采用广义Rayleigh商进行定位求解,这类算法不需要对辐射源位置进行预估,但其校正矩阵将多个变量的噪声项按方差加权相加,并未根据定位时实际定位数据的误差大小进行校正,因此当含噪声的变量较多且噪声方差较大时定位精度不佳。文献[14-16]基于CTLS定位求解,定位性能较好,但求解需要迭代,计算量较大。文献[17-19]给出了定位闭式解,以较少的计算量仍可达到不错的定位性能。
本文的无源时差定位算法同时考虑观测站位置误差和时差测量误差。首先将利用转发式时差的非线性定位方程转化为不需要中间变量的直接线性方程,然后根据CTLS算法将线性方程转化为约束优化问题,并转化为等价的无约束优化问题,并最终给出定位的近似闭式解。
本文内容组织如下:第1节给出利用转发式时差的无源定位模型,将三维非线性定位方程转化为不需要中间变量的直接线性方程;第2节基于CTLS算法,根据线性方程中时差误差和观测站位置误差的结构,将定位问题转化为约束优化问题;第3节推导给出定位近似闭式解,第4节进行了仿真实验。
1 利用转发式时差的直接线性定位模型
本文实现对辐射源目标的三维定位,副观测站转发目标信号给主观测站以测量得到转发式时差。为了保证定位结果的唯一性,假定观测站不在同一个平面或同一条直线上。

(1)
(2)
(3)

(4)
式中:στi1(i=2,3,…,M)为各时差测量的标准差。
文献[3]给出转发式时差的στi1的计算公式为
(5)
式中:Bn为接收机噪声带宽;T为测量积累时间;一般为信号持续时间;γ为有效输入信噪比;Bs为信号等效带宽。

对比时差的两种测量方法,基于同步时钟的差分式时差虽然原理简单,但测量精度比较难以提高。而转发式时差,信号带宽越宽,信号时间越长,信噪比越高,测量得到的精度越高。
转发式时差对应的距离差为
(6)
式中:c为信号传播的速率。
下面推导给出转发式时差无源定位的直接线性方程。令辐射源信号的发射时刻为t0,信号传递到主观测站的时间为t1,信号经过副观测站i转发到主观测站的时刻为ti,有
(7)
(8)
(9)
将式(8)和式(9)等号两边分别平方并相减,转化可得
(10)
当i≠j时,由式(10)可得
(11)

(12)
将式(12)代入式(11),可得如下线性方程
(13)
因此,根据式(13)可以将M个观测站测量得到的M-1时差构造成M-2个独立线性方程以求解辐射源目标的位置,写成矩阵与向量运算的形式如式(14)所示。为了使线性方程组非欠定,需要满足M≥5。如果观测站观测站数目M=4,只能得到3个时差,独立方程数降低,无法得到唯一解,会存在定位结果模糊的问题。对于该情况,可以利用观测站得到的其他测量信息解模糊,如主观测站测量得到的目标波达方向(DOA)。另外,也可以引入正则化方法解决定位方程ill-posed问题,如Tikhonov正则化法、正则CTLS法等。
A*X*=b*
(14)
式中:X*=u*=[x*y*z*]T
A*=
b*=
由于各副观测站与主观测站之间距离可以由各观测站的位置坐标计算得到,因此经过一系列变换后得到矩阵A*和向量b*只利用了辐射源信号直接到达主观测站与经过各副观测站转发到达主观测站的时差信息,以及各观测站位置坐标。
由于观测站真实位置和时差无法得到,显然矩阵A*和向量b*中各元素所受到的噪声分量并不独立同分布,因此使用适用于情况的CTLS来解决该问题。
2 基于CTLS的定位算法
矩阵A*和向量b*可以由含有噪声的观测站位置坐标和时差测量构成的矩阵A和向量b以及扰动矩阵ΔA和扰动向量Δb之和来逼近,即
(15)
令含有噪声的变量为m=[sTτT]T,其噪声向量为n=[ΔsTΔτT]T,由于观测站位置噪声和时差测量噪声之间相互独立,因此噪声向量n的自相关矩阵为Rn=E(nnT)=blkdiag(Qs,Qτ),其中blkdiag(·)表示分块对角矩阵。由于各噪声协方差不同,可以将n白化,令n白化后服从正态分布白噪声向量为e。将Rn进行Cholesky分解有Rn=PPT,则噪声向量白化的过程为e=P-1n,则有噪声向量n与正态分布白噪声向量e的关系为n=Pe。将测量估计得到的m代替真实向量s*和τ*代入矩阵A*和向量b*,并令替换后的矩阵和向量分别为A和b,将它们的各元素在s和τ处进行泰勒展开,有
(16)
式中:i=1,2,…,M-2;j=1,2,3;gij为矩阵A中第i行第j列对应的元素对向量m中各元素分别求偏导得到的梯度向量;gi4为向量b中第i个元素对向量m中各元素分别求偏导得到的梯度向量。
忽略式(16)中的高阶项,利用一阶项构造扰动矩阵ΔA和扰动向量Δb。并根据噪声向量n与正态分布白噪声向量e的关系n=Pe,在构造的扰动矩阵ΔA和扰动向量Δb中将噪声向量n替换为白化后的噪声向量e,有
(17)
式中:
(18)

上述各项中分别有如下非零项:
(2cτ21-2d21-cτ(i+2)1+d(i+2)1)/d21×
(2cτ21-2d21-cτ(i+2)1+d(i+2)1)/d(i+2)1×
联立式(14)、式(15)和式(17)可得
(19)
式中:HX=xG1+yG2+zG3-G4;HXPe为AX-b的一阶泰勒展开项。
HXPe将噪声向量e与系统误差项ΔAX-Δb之间的关系近似为噪声e的线性映射。
采用CTLS算法,辐射源目标位置的求解等价于如下的约束问题:
(20)
3 定位近似闭式解的推导
由式(20)所示的约束条件可得
(21)
式中:+号表示Moor-Penrose广义逆矩阵。

(22)

(23)
由于无约束优化的目标函数是关于X的实非线性函数,无法直接求解。因此基于CTLS算法的相关文献基本都是利用Newton算法进行迭代求解,迭代公式为
(24)

计算目标函数的Hess矩阵和梯度向量需要多次矩阵求逆和相乘,计算复杂度高,迭代求解时间较长。另外,由于定位求解为非凸函数的求解,迭代法无法保证迭代收敛至全局最优解。因此下面推导给出不需要迭代的近似闭式解。对CTLS的无约束优化目标函数式(23)进行求导。
(25)
将式(21)代入式(25),可得
(26)
式(26)是高斯白噪声e的二阶项。忽略二阶项可以得到式(23)的近似方程为
(27)
解该近似方程可以得到CTLS的近似闭式解为
(28)
虽然近似闭式解的精度小于迭代法收敛时的结果,但由于近似忽略的是噪声二阶项,近似的线性方程与非线性方程之间相差较小,因此近似闭式解与迭代解两者之间的精度差异较小。而又因为不存在迭代收敛的问题,近似闭式解具有更好的稳定性。
综上所述,利用转发式时差并考虑观测站位置误差的无源定位算法的步骤为
步骤1 将观测站位置估计值和时差测量值代入式(14)得到[A b]。



4 仿真实验
为了验证算法的性能,分别对近距离和远距离的目标进行了蒙特卡罗仿真实验,比较分析各算法性能随着观测站位置噪声和观测站数目的变化。将本文提出的算法与LS算法、TLS算法、Two-stage WLS算法[6]、广义Rayleigh商算法[11]的定位性能进行比较。LS算法和TLS算法使用的模型都是本文中推导给出的模型,即矩阵[A*b*]使用式(14)中给出的公式。本文中的时差与文献[6]中的时差定义不同,在仿真Two-stage WLS算法时将本文中得到的时差减去光速在主副观测站间传播的时间换算成文献[6]中的时差,按算法步骤实现。广义Rayleigh商算法的仿真实现在采用文献[11]的算法时同样也考虑观测站位置误差,即对[Ab]同时进行时差和观测站位置泰勒展开,其他步骤与文献[11]一致。另外按文献[20]中的公式仿真给出观测站存在位置误差的克拉美-罗下限(CRLB)。在仿真中,观测站与辐射源目标在空间中的位置如表1所示。

表1 观测站和辐射源在空间中的位置

采用均方根误差(RootMeanSquaresError,RMSE)来度量辐射源位置的定位精度性能,其定义为
(29)
4.1 算法性能随着观测站位置误差的变化
为了分析比较观测站位置误差对辐射源定位的影响,保持时差测量噪声方差不变,改变各观测站位置误差的大小,分析比较各定位算法的定位误差RMSE随位置误差的变化,在仿真实验中,观测站数目M设定为6,分别选取表1中前6个观测站位置,分别选取表1中所列的近距离辐射源目标和远距离辐射源目标,给出各算法RMSE曲线如图1和图2所示。在对这两个辐射源进行定位仿真时,假定接收机噪声带宽Bn=30MHz,分别选取两种固定的信号参数组进行转发式时差测量。第1种信号的参数组为等效带宽Bs=20MHz,信号时长T=3μs;第2种信号的参数组为等效带宽Bs=10MHz,信号时长T=1μs。两种信号的有效输入信噪比γ=-10dB。可以根据这些信号参数并利用式(5)计算得到时差测量噪声方差。根据这两个信号参数组仿真得到的RMSE曲线如图1(a)和图2(b)所示。
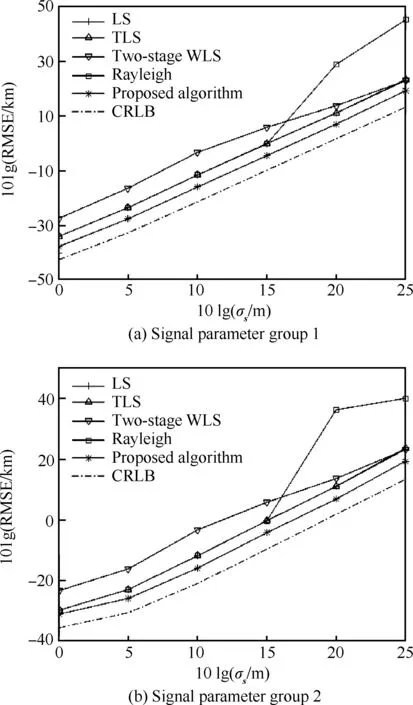
图1 不同观测站噪声对近距离辐射源目标定位时各算法的RMSE
Fig.1 Comparison of RMSEs of different algorithms versus sensor position error for close range emitter
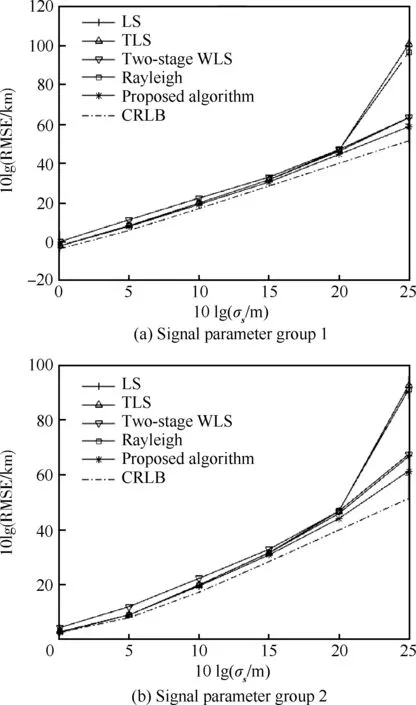
图2 不同观测站噪声对远距离辐射源目标定位时各算法的RMSE
Fig.2 Comparison of RMSEs of different algorithms versus sensor position error for long range emitter
对于近距离辐射源目标,Two-stageWLS算法的RMSE曲线随着观测站误差的增大而逐渐靠近CRLB曲线,但精度性能不是最优的。当观测站位置误差较小,广义Rayleigh商算法的精度性能随着观测站位置误差的增大而线性增大,当观测站位置误差较大(误差大于100m)时,该算法精度性能有发散现象。当时差测量误差较大时,本文算法在观测站位置误差较小(误差小于3m)时性能不是最优的,但随着观测站位置误差的增大,本文算法精度性能一直较稳定且优于其他算法;当时差测量误差较小时,本文算法精度性能也一直优于其他算法。
对于远距离辐射源目标,Two-stageWLS算法的RMSE曲线随着观测站误差的增大而逐渐靠近CRLB曲线,但精度性能不是最优的。当观测站位置误差较小,广义Rayleigh商算法的精度性能随着观测站位置误差的增大而线性增大,且在观测站位置误差较小(误差小于3m)时,与其他算法相比定位精度性能最优,但当观测站位置误差较大(误差大于100m)时,该算法精度性能发散现象明显。本文算法在观测站位置误差较小(误差小于3m)时性能不是最优的,且在时差测量误差较大情况下与其他算法相比定位精度性能较差,但随着观测站位置误差的增大,本文算法精度性能一直较稳定且一直优于其他算法。
4.2 算法性能随着观测站数目的变化
为了分析比较各定位算法性能随着观测站数目的变化,保持时差测量噪声方差和观测站位置噪声方差不变,仿真分析比较不同观测站数目时各算法的定位误差和解算耗时。
仿真实验中观测站数目M依次选取从5到9,观测站位置依次选取表1中的各位置。观测站在坐标系各轴方向的噪声标准差为σs=10m。测量时差所用的信号参数组选取仿真实验1中的第2个参数组。分别选取表1中所列的近距离辐射源目标和远距离辐射源目标,各算法随着观测站数目变化的RMSE曲线如图3所示。
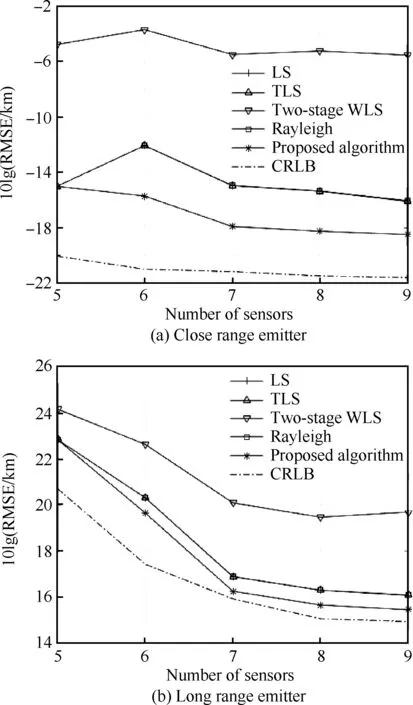
图3 不同观测站数目时各定位算法的RMSE
Fig.3 Comparison of RMSEs of different algorithms for different number of sensors
根据图3可知,不管辐射源目标的远近,各算法的RMSE曲线都是随着观测站数目的增大而大致呈现下降的趋势,并且逐渐靠近CRLB曲线。但精度下降的趋势不是线性的,当观测站数目较小,观测站数目的增加导致的精度提高明显,而当观测站数目较大时,观测站数目的增加则不会导致较大的精度提高。本文算法的精度性能随着观测站数目增加而有明显提高,且提高的幅度要优于其他算法。在仿真条件下,本文算法的精度性能一直较稳定且优于其他算法。
下面分析比较各算法的计算复杂度,将本文算法与Two-stageWLS算法和广义Rayleigh商算法进行分析比较。虽然Two-stageWLS算法与本文算法模型不同,但都需要计算两次形如最小二乘解的求解步骤,因此两者计算复杂度的量级应该相当。Two-stageWLS算法需要计算两次加权最小二乘。对于三维定位来说,Two-stageWLS算法第一步是四维变量的加权最小二乘,涉及到求逆的两个矩阵维数分别是(M-1)×(M-1)和4×4,第二步是三维变量的加权最小二乘,涉及到求逆的两个矩阵维数分别是4×4和3×3。因此Two-stageWLS算法的计算复杂度近似为M3-3M2+3M+154。本文算法首先需要求解最小二乘解,涉及到求逆的矩阵维数为4×4,近似闭式解的计算形如加权最小二乘,涉及到求逆的两个矩阵维数分别是(M-2)×(M-2)和3×3。但算法中构造校正矩阵需要计算44(M-2)个校正变量,各变量的构造需要计算几次到十几次不等的乘法和加法运算,平均以5次乘法进行统计,本文算法的计算复杂度近似为M3-6M2+232M-357。广义Rayleigh商算法与本文算法同样需要构造校正矩阵,两者构造校正矩阵的计算量相当。但广义Rayleigh商算法除了构造校正矩阵外,还需要构造矩阵束以及进行广义特征值分解,其计算量要远大于本文算法的形如广义最小二乘的求解计算。
综合上面的分析讨论,当观测站数目为几个到几十个之间时,本文算法的计算量要大于Two-stageWLS算法,但差异不是很明显。但广义Rayleigh商算法的计算量要远大于本文算法的计算量。
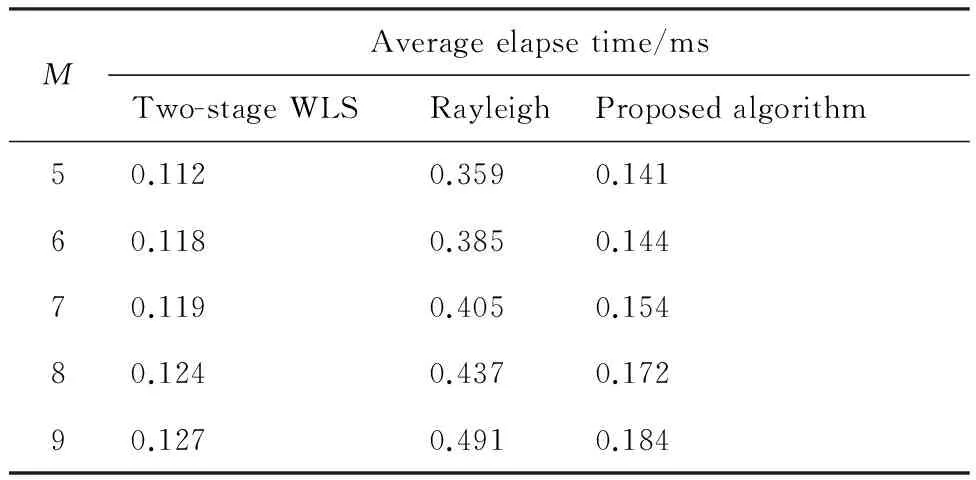
表2为统计得到的仿真中各算法在不同观测站数目时的单次定位解算平均耗时。仿真所用处理器为Inter(R)Core(TM)i7-3930K,频率为3.2GHz,系统内存为8GB。操作系统为64位Windows7,仿真软件为MATLABR2014b。
表2 不同观测站数目M情况下各算法单次定位解算平均耗时
Table 2 Average elapse time per location of different algorithms versus number of sensorsM
MAverageelapsetime/msTwo-stageWLSRayleighProposedalgorithm50.1120.3590.14160.1180.3850.14470.1190.4050.15480.1240.4370.17290.1270.4910.184
由表2可知,各算法的单次定位平均耗时都随着观测站数目的增大而增大。本文算法的平均耗时要大于Two-stage WLS算法,但两者差异不大。广义Rayleigh商算法的平均耗时要远大于本文算法,为本文算法平均耗时的2~3倍。表2实际统计得到的各算法在不同观测数目时的单次定位解算平均耗时的比较结果与前面计算复杂度的分析结论一致,本文算法的计算复杂度介于Two-stage WLS算法和广义Rayleigh商算法之间。
5 结 论
1) 将转发式时差的三维非线性定位方程转化为不需要中间变量的直接线性方程。
2) 将线性方程按时差测量误差和观测站位置误差泰勒展开以构造校正矩阵,基于CTLS算法经过推导最后给出定位近似闭式解。
3) 在观测站位置误差较大时定位精度性能优于其它算法,计算复杂度介于Two-stage WLS算法和广义Rayleigh商算法之间。
[1] 赵国庆. 雷达对抗原理[M]. 第2版. 西安: 西安电子科技大学出版社, 2012: 9-11, 82-84. ZHAO G Q. Principle of radar countermeasure[M]. 2nd ed. Xi’an: Xidian University Press, 2012: 9-11, 82-84 (in Chinese).
[2] 胡来招. 无源定位[M]. 北京: 国防工业出版社, 2005: 150-161. HU L Z. Passive locating[M]. Beijing: National Defence Industry Press, 2005: 150-161 (in Chinese).
[3] RICHARD A P. Electronic warfare target location methods[M]. London: Artech House, 2005: 140-146.
[4] HO K C, LU X N, KOVAVISARUCH L. Source localization using TDOA and FDOA measurements in the presence of receiver location errors: Analysis and solution[J]. IEEE Transactions on Signal Processing, 2007, 55(2): 684-696.
[5] MA Z H, HO K C. TOA localization in the presence of random sensor position errors[C]//IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Piscataway, NJ: IEEE Press, 2011: 2468-2471.
[6] HO K C. Bias reduction for an explicit solution of source localization using TDOA[J]. IEEE Transactions on Signal Processing, 2012, 60(5): 2101-2114.
[7] 陈少昌, 贺慧英, 禹华钢. 传感器位置误差条件下的约束总体最小二乘时差定位算法[J]. 航空学报, 2013, 34(5): 1165-1173. CHEN S C, HE H Y, YU H G. Constrained total least-squares for source localization using TDOA measurements in the presence of sensor position errors[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(5): 1165-1173 (in Chinese).
[8] 曹亚陆, 彭力. 一种考虑传感器位置误差的改进源定位算法[J]. 航空学报, 2014, 35(7): 1992-1998. CAO Y L, PENG L. An improved source localization algorithm in presence of sensor location errors[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(7): 1992-1998 (in Chinese).
[9] QU F Y, MENG X W. Source localization using TDOA and FDOA measurements based on constrained total least squares algorithm[J]. Journal of Electronics & Information Technology, 2014, 36(5): 1075-1081 (in Chinese). 曲付勇, 孟祥伟. 基于约束总体最小二乘方法的到达时差到达频差无源定位算法[J]. 电子信息学报, 2014, 36(5): 1075-1081.
[10] BAKHOUM E G. Closed-form solution of hyperbolic geolocation equations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(4): 1396-1404.
[11] 徐征, 曲长文, 骆卉子. 无需中间变量的多运动站时差定位新算法[J]. 航空学报, 2014, 35(6): 1665-1672. XU Z, QU C W, LUO H Z. Novel multiple moving observers TDOA localization algorithm without introducing intermediate variable[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(6): 1665-1672 (in Chinese).
[12] 徐征, 曲长文, 王昌海, 等. 一种基于最小化广义Rayleigh商的无源定位算法研究[J]. 电子学报, 2012,40(12): 2446-2450. XU Z, QU C W, WANG C H, et al. Research on a passive localization algorithm based on minimizing the generalized rayleigh quotient[J]. Acta Electronica Sinica, 2012, 40(12): 2446-2450 (in Chinese).
[13] 徐征, 曲长文, 王昌海. 系统误差条件下的多运动站无源定位性能分析[J]. 航空学报, 2013, 34(4): 629-635. XU Z, QU C W, WANG C H. Performance analysis for multiple moving observers passive localization in the presence of systematic errors[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(4): 629-635 (in Chinese).
[14] WANG D, ZHANG L, WU Y. Constrained total least squares algorithm for passive location based on bearing-only measurements[J]. Science China Series F: Information Sciences, 2007, 50(4): 576-586
[15] LI W C, WEI P, XIA X C. A robust TDOA-based location method and its performance analysis[J]. Science China Series F: Information Sciences, 2009, 52(5): 876-882.
[16] LIN L, SO H C, CHAN F K, et al. A new constrained weighted least squares algorithm for TDOA-based localization[J]. Signal Processing, 2013, 93(11): 2872-2878.
[17] 杨洁, 刘聪锋. 迭代频差定位算法及其性能分析[J]. 西安电子科技大学学报, 2013, 40(5): 8-14. YANG J, LIU C F. Iteration FDOA location algorithm and its performance analysis[J]. Journal of Xidian University, 2013, 40(5): 8-14 (in Chinese).
[18] 何友, 修建娟, 唐小明, 等. 基于时差信息的超视距目标定位与跟踪[J]. 电子学报, 2003, 31(12): 1917-1920. HE Y, XIU J J, TANG X M, et al. Location and tracking of the over-the-horizon target on TDOA[J]. Acta Electronica Sinica, 2003, 31(12): 1917-1920 (in Chinese).
[19] 谭志, 张卉. 无线传感器网络RSSI定位算法的研究与改进[J]. 北京邮电大学学报, 2013, 36(3): 88-91, 107. TAN Z, ZHANG H. A modified mobile location algorithm based on RSSI [J]. Journal of Beijing University of Posts and Telecommunications, 2013, 36(3): 88-91, 107 (in Chinese).
[20] 张贤达. 矩阵分析与应用[M]. 第2版. 北京: 清华大学出版社, 2013: 447-448. ZHANG X D. Matrix analysis and applications[M]. 2nd ed. Beijing: Tsinghua University Press, 2013: 447-448 (in Chinese).
朱颖童 男, 博士研究生。主要研究方向: 电子战信号处理、 无源定位与跟踪。
Tel: 029-88204179
E-mail: zhuyt_xd@163.com
董春曦 男, 博士, 副教授, 硕士生导师。主要研究方向: 电子对抗技术、 电子战系统仿真。
Tel: 029-88204179
E-mail: chxdong@mail.xidian.edu.cn
Received: 2015-02-10; Revised: 2015-05-04; Accepted: 2015-07-18; Published online: 2015-07-24 13:48
URL: www.cnki.net/kcms/detail/11.1929.V.20150724.1348.001.html
Foundation items: National Basic Research Program of China (6131818012); Fundamental Research Funds for the Central Universities (JDZD140503, JDYB140810)
*Corresponding author. Tel.: 029-88204179 E-mail: zhuyt_xd@163.com
Passive localization using retransmitted TDOA measurements in the presence of sensor position errors
ZHU Yingtong*, DONG Chunxi, LIU Songyang, DONG Yangyang, ZHAO Guoqing
KeyLaboratoryofElectronicInformationCountermeasureandSimulationTechnology,MinistryofEducation,
XidianUniversity,Xi’an710071,China
Location sensors placed in the motion platform may result in position error, which will affect the performance of passive positioning accuracy. Retransmitted measurement of the time difference of arrival (TDOA) needs to transmit emitter signal intercepted by different sensors to the same location, such as the main sensor. For these two issues, a passive location algorithm is proposed based on constrained total least squares (CTLS). First, the nonlinear equation using retransmitted TDOA is converted to a direct linear equation without intermediate variables. Then, the direct linear equation is transformed into a constrained optimization problem and unconstrained optimization problems based on CTLS algorithm. A quasi-closed-form solution to the passive location is derived. Simulations prove that the proposed algorithm achieves better location accuracy than the previous algorithms in the case of higher sensor position error.
passive localization; time difference of arrival (TDOA); sensor position error; constrained total least squares (CTLS); quasi-closed-form solution
2015-02-10;退修日期:2015-05-04;录用日期:2015-07-18; < class="emphasis_bold">网络出版时间:
时间: 2015-07-24 13:48
www.cnki.net/kcms/detail/11.1929.V.20150724.1348.001.html
国家“973”计划 (6131812012); 中央高校基本科研业务费专项资金 (JDZD140503, JDYB140810)
.Tel.: 029-88204179 E-mail: zhuyt_xd@163.com
朱颖童, 董春曦, 刘松杨, 等. 存在观测站位置误差的转发式时差无源定位[J]. 航空学报, 2016, 37(2): 706-716. ZHU Y T, DONG C X, LIU S Y, et al. Passive localization using retransmitted TDOA measurements in the presence of sensor position errors[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(2): 706-716.
http://hkxb.buaa.edu.cn hkxb@buaa.edu.cn
10.7527/S1000-6893.2015.0203
V247.5; TN971
:A
: 1000-6893(2016)02-0706-11
*