基于智能算法的直接转矩控制系统仿真研究
2016-02-15佘双翔许志伟
辛 丽,佘双翔,许志伟
(1.中国电建集团中南勘测设计研究院有限公司,湖南长沙410014;2.湖南工程学院,湖南湘潭411101)
基于智能算法的直接转矩控制系统仿真研究
辛 丽1,佘双翔1,许志伟2
(1.中国电建集团中南勘测设计研究院有限公司,湖南长沙410014;2.湖南工程学院,湖南湘潭411101)
本文阐述了风力发电机组用双馈异步电机直接转矩控制(DTC)系统的基本原理、结构及特点,采用动态仿真工具MATLABSIMULINK建立DTC系统的通用模型并验证其正确性。针对传统滞环Band-Band控制方法的不足,本文采用模糊神经智能算法来改进DTC系统,设计了模糊控制器并进行仿真对比分析,结果表明模糊控制能进一步改善DTC系统性能,具有一定的理论价值和参考意义。
直接转矩控制系统;模糊控制;建模;仿真
引言
作为风力发电机组系统中的核心部分,驱动电机及其控制系统的性能对机组的综合表现有着最直接的影响。异步电机具有结构简单、运行可靠、转矩脉动小、调速范围宽等优点,其控制技术主要有转差频率控制、矢量控制(VC)和近几年发展起来的直接转矩控制(Direct Torque Control,简称DTC)。
直接转矩控制省去了矢量控制中的解耦过程,采用空间矢量分析方法,把转子磁通定向变换为定子磁通定向,控制定子磁链的幅值以及该矢量相对于转子磁链的夹角,借助离散两点式调节(Band-Band控制)产生控制信号,直接对逆变器的开关状态进行最佳控制,获得高动态性能。直接转矩控制具有手段直接、结构简单、静态性能稳定、动态响应迅速的特点,因此非常适合风力发电机的控制。[1~4]
本文采用MATLABSIMULINK建立通用的异步电机DTC系统的仿真模型,并对系统进行稳态特性仿真,验证了仿真模型的正确性。同时,为改进传统DTC的缺点,提高转矩性能,抑制低速脉动,本文将在智能算法的理论基础上设计模糊神经控制器,利用通用模型进行仿真,对比分析其效果。
1 直接转矩控制
DTC系统一般由坐标变换磁链观测计算单元、转矩调节单元、磁链调节单元、磁链位置判断单元、转速调节器、开关信号选择单元、逆变器单元几个部分组成。
2 模糊控制器的基本理论及设计
为了实现对转矩和磁链的解耦,传统DTC系统中转矩和磁链独立的调节一般采定子用两值bang-bang控制形式的滞环比较器来完成,而系统控制策略的核心是选择恰当的电压矢量以保证转矩和磁链在容差范围内。故传统DTC系统不可避免地存在转矩响应滞后、转矩脉动大等缺点。为了改善直接转矩控制的性能,本文在智能算法的理论基础上设计模糊神经控制器来改善直接转矩控制的性能。
2.1 模糊控制原理
模糊逻辑在控制领域中的应用称为模糊控制,它能将操作经验和知识表示成语言描述的控制规则去控制系统。最基本的模糊控制器包括模糊化、模糊推理、清晰化三个主要功能模块。
2.2 模糊控制器设计
2.2.1 模糊变量

式中Ψsα ,Ψsβ是α,β坐标系下的定子磁链,θ可用六个语言变量值θ1,θ2,θ3,θ4,θ5,θ6来描述。
(2)模糊变量EΨs计算公式:

(1)模糊变量θ及其录属度公式:
我们可以用四个语言变量描述定子磁链变化,定子磁链快速增加为正大(PL),缓慢增加为正小(PS),缓慢减小为负小(NS),快速减小为负大(NL)。
(3)模糊变量ET计算公式:

下面用三个语言值来表征电机电磁转矩的变化,转矩增加为正(P),转矩变化较小为零(Z),转矩减小为负(N)。
(4)控制变量
由于逆变器的开关状态U作为模糊控制器的控制变量,故模糊控制变量相应地有八个语言值ui(i=0,…,7),即U的录属函数为:

2.2.2 模糊控制规则
作为DTC系统模糊控制器的核心,其第i条规则可以用下列语句表达:
Ri:If EΨSis Ai,ETis Biand θ is Ci,Then U is ui
2.2.3 模糊决策
经过Mansdani的最小运算规则转化得出的第i条控制决策见式(5):

基于模糊控制器的直接转矩控制系统框图如图1所示。
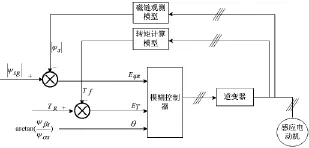
图1 基于模糊控制器的直接转矩控制框图
3 DTC系统建模
根据异步电机直接转矩控制系统的工作原理及系统结构,采用动态仿真工具MATLABSIMULINK可建立相应的系统仿真模型见图2。

图2 直接转矩控制的系统仿真模型
模型中磁链调节单元用施密特触发器实现对磁链幅值的直接自控制,对磁链幅值进行两点式的调节,其仿真模型图3所示。
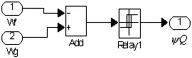
图3 磁链调节单元仿真模型
4 DTC系统仿真分析
本节将对传统DTC系统以及模糊控制DTC的稳态运行特性进行仿真分析。仿真实验时所用到的三相异步电机额定容量为7500VA,额定电压为400V,频率为50Hz,控制磁通为0.72Wb,额定转矩为10N·m,速度参考值设为1000r/min,负载转矩设为10N·m,通过更换控制子模块,相同工况下传统DTC系统和模糊控制DTC系统的仿真对比结果如图4~6所示(左为传统DTC系统,右为模糊控制DTC系统)。
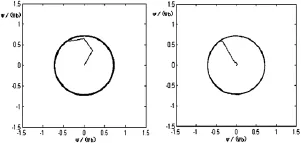
图4 磁链波形
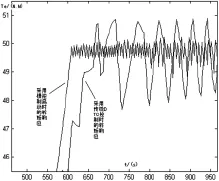
图5 启动时转矩响应对比图
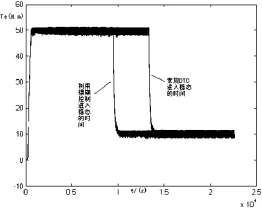
图6 稳态时转矩响应对比图
仿真结果验证了本文所建仿真模型的正确性,模型可直接观测电机各种运行参数,能够满足系统的测试要求,实现了磁链和转矩的直接控制。从对比分析中可以看出模糊控制可以使得磁链的抖动范围缩小,具有启动转矩的响应加快,启动转矩脉动明显减少的优点,稳态运行时在抑制转矩脉动方面也收到了一定成效。
5 结论
本文在分析异步电机直接转矩控制系统的基础上,建立了DTC系统通用仿真模型,该模型具有良好的兼容性,只需修改其中的子系统模块,即可在此基础上进行本文所设计的模糊控制DTC系统的仿真方法方面的研究。对比分析表明将智能控制理论引入直接转矩控制中,能够较大程度改善感应电动机直接转矩控制系统的性能,提高系统鲁棒性,对后续智能控制策略的引入具有很大参考价值。
[1]李 夙.异步电动机直接转矩控制[M].北京:机械工业出版社,2001.
[2]张春梅,尔桂花.直接转矩控制研究现状与前景[J].微电机,2000,33(6):25~28.
[3]何映辉,李平康.异步电动机直接转矩控制系统的Simulink仿真[J].铁道机车车辆,2005,25(2):13~17.
[4]Jabeur-Seddik C.B.,Fnaiech F.Hysteresis and fuzzy based nonlinear controllers for a direct torque control of an induction machine IEEE International Conference on Industrial Technology,2005,1:38~43Vol.1.
TP273.5
A
2095-2066(2016)36-0025-02
2016-12-1
辛 丽(1982-),女,工程师,从事风电工程电气设计及电机传动系统研究。