基于模型预测控制方法的发动机低耗油率控制
2016-02-15南昌航空大学飞行器动力工程学院江西南昌330063
杨 蓓,吴 琼(南昌航空大学飞行器动力工程学院,江西南昌330063)
基于模型预测控制方法的发动机低耗油率控制
杨 蓓,吴 琼(南昌航空大学飞行器动力工程学院,江西南昌330063)
模型预测控制是一种不同于经典控制方法的控制策略,该方法通过将控制问题转化为针对目标函数的优化问题来计算控制规律、达到降低燃油消耗的控制目标。模型预测控制可以经由加权矩阵的选取以达到特定的控制目标,通过将燃油消耗作为控制目标函数,可以降低燃油的消耗量。
模型预测控制;航空发动机;非线性模型;离散模型
1 引言
航空发动机工作过程复杂,工作状态的变化较大,必须对其加以控制以确保其稳定、可靠地运行,并降低其燃油消耗、提高经济效益[1]。经典反馈控制理论已经很难达到降低燃油消耗的需求[2]。模型预测控制(Model Predictive Control,MPC)是被广泛讨论的一种反馈控制策略。在每一采样时刻,根据获得的当前测量信息,求解优化问题,并将获得的第一个控制序列的元素作用于发动机,并在一直重复该过程。在线求解开环优化问题获得优化序列是MPC与传统控制的主要区别。MPC可在选取控制规律时便明确考虑燃油消耗这等约束[2,3]。
MPC不根据当前和过去的偏差来产生控制作用,而是评估应用各种备选控制输入序列所能带来的结果,并从中选取使性能度量最小化的控制序列。在合理选择性能指标中的加权矩阵的基础上,MPC可以在很大程度上实现燃油消耗量的最优控制,并可针对非线性模型进行控制。但MPC解决优化问题所需的计算量过大。必须计算密集的约束优化问题[2,4,5],以为确保发动机不过分偏离预测初始值,快速完成预测和确定最优控制序列。
2 模型预测控制与控制器设计
在进行的发动机控制系统设计时,采用部件级模型[6]。部件级模型是基于组成发动机的各个部件的模型建立起来部件级模型建模过程中所需的数据将从GSP软件中获取[7]。
发动机动态过程模型中需要考虑转子的惯性,从而获得转子功率平衡方程式,建立部件级模型。再通过线性化来获得线性模型以降低计算量。
通过状态空间模型建立预测控制的基本原理和算法是一种较好的选择。按照预测控制的基本原理可以分为三个步骤:①预测系统未来动态;②求解优化问题;③将解的第一个元素作用于系统。并根据参考指令和测量值不断重复执行这些操作[3]。
根据线性化可以得到连续时间状态方程。采用离散模型在推导上有许多便利,因此将线性系统转为离散的状态空间表达式(1):

式中:x(k)∈Rnx是状态变量;u(k)∈Rnu是控制输入变量;yc(k)∈Rnc是被控输出变量。
基于离散状态方程模型预测系统未来动态是模型预测控制的第一步。将上述离散方程改写为增量式可得:

式中:△x(k)=x(k)-x(k-1),△u(k)=u(k)-u(k-1)。
根据预测控制的原理,需要先以最新测量值为初始条件,基于模型(2)预测系统未来动态。设定预测时域为p,控制时域m,且m≤p。在k时刻,测量值为x(k),计算△x(k)=x(k)-x(k-1),并将△x(k)作为预测系统未来动态的初始条件。在获得了x(k)之后,可以根据公式(2)预测k+1及以后的状态增量:

进一步,根据公式(2)~(4)预测系统在k+1到k+p的输出值yc:

为方便后续公式推导,先定义p步预测输出向量Yp(k+1| k)和m步输入向量△U(k)。对于多输入多输出系统,yc(k+i|k)∈Rn×1,△u(k+i)∈Rn×1,即p×1表示矩阵Yp(k+1|k)中输出的个数,而非矩阵Yp(k+1|k)的维数。
总结式(2)~(6)可得:

k+1时刻的输入对k及之前时刻的输出没有影响,但会对k+1之后的输出有作用[3]。
在选择目标函数时,该目标函数应能够表现对降低燃油消耗这一需求,可以将目标函数选择为:
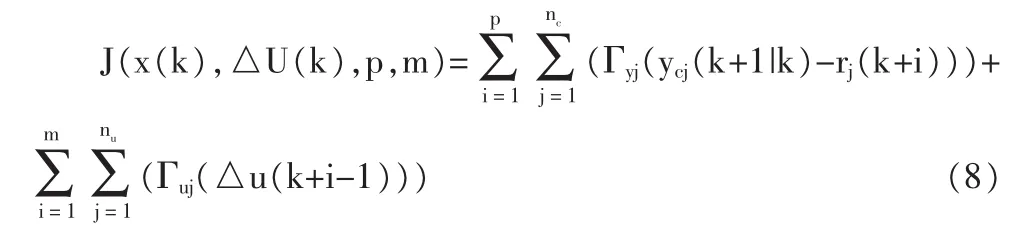
式中:rJ(k+i),i=1,2,…,p位给定的参考输入序列的第j个分量;Γyj是对第j个预测控制输出误差的加权因子。加权因子大则对系统输出偏差的要求越小。可以将(9)写成范数形式:
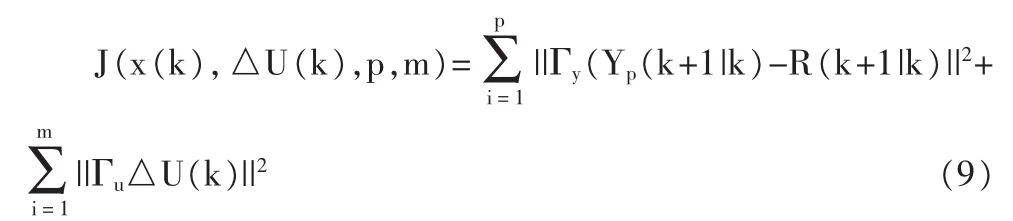
控制加权因子Γu,i越大,表明期望的控制动作变化越小。
最终可以将优化问题归结为:
min△U(k)J(x(k),△U(k),p,m)
将目标函数(9)写为矩阵向量形式,可得:

参考输入序列为:

定义Ep(k+1|k)可得:

联立式(11)(12)最终可得:

式中:c是综合而来的常数。
对式(13)进行最优化计算即可得:

在完成预测控制的第二步之后,执行第三个步骤,将开环最优控制序列的第一个元素作用于系统。
3 系统仿真示例
当某发动机在飞行高度H=10km、Ma=0.9、低压转子转速nL=96%时的工作状态,可以获得其系统的线性化方程[9]:
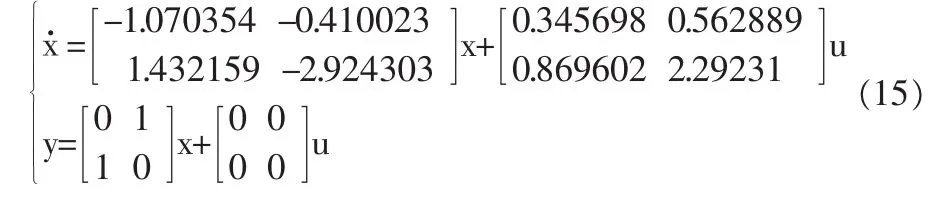
选择状态为x=[nHnL]T;输入为u=[qm,fA8]T,分别为供油量和尾喷口面积。选择系统输出和输入加权矩阵为(16)所示的对角阵,并选择预测步长为10,控制步长为8。

仿真结果如图1~2所示。所选的参考指令如图中虚线所示,低压转子转速跟踪效果较好,高压转子转速基本无变化,如图2可知,燃油流量有了明显的降低。
由图可知,发动机低压转子转速nL较好地跟上了指令信号,燃油流量有了明显下降。可以通过修改输出加权矩阵对系统输出量进行调整。
4 结论

图1 nL跟踪指令信号
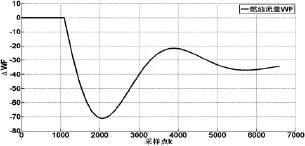
图2 燃油流量变化
通过选定特定控制目标,并求解二次优化问题可以较好地解决MIMO问题。使用模型预测控制,跟经典的PID控制器相比,可以有效降低燃油消耗,提高民用航空产业的经济效益。
[1]樊思齐.航空发动机控制[M].西安:西北工业大学出版社,2008.
[2]Richter Hanz.Advanced Control of Turbofan Engines[M].Springer Science&Business Media,2011.
[3]陈 虹.模型预测控制[M].北京:科学出版社,2013.
[4]Brunell B J,Bitmead R R,Connolly A J.Nonlinear Model Predictive Control of an Aircraft Gas Turbine Engine[C].IEEE CONFERENCE ON DECISION AND CONTROL.2002:4649~4651 vol.4.
[5]Richter H,Singaraju A V,Litt J S.Multiplexed Predictive Control of a Large Commercial Turbofan Engine[J].Journal of Guidance Control&Dyna mics,2008,31(2):273~281.
[6]孙健国,李秋红,杨 刚.航空燃气涡轮发动机控制[M].上海:上海交通大学出版社,2014.
[7]夏 超,王继强,商国军,等.基于Matlab/Simulink的航空发动机部件级建模与分析[J].航空发动机,2012,38(04):31~33.
[8]邹 涛,丁宝苍,张 端.模型预测控制工程应用导论[M].化学工业出版社,2010.
[9]吴志琨.涡扇发动机控制系统设计研究[D].西北工业大学,2007.
TK321
A
2095-2066(2016)36-0004-02
2016-12-13
杨蓓(1979-),女,讲师,研究方向为航空发动机控制。