载人飞船钝头体返回舱减速着陆组合方式对比
2016-02-13石泳刘哲陈伟跃郭斌
石泳刘哲陈伟跃郭斌
(1 南京航空航天大学航空宇航学院,南京 210016)
(2 中国空间技术研究院载人航天总体部,北京 100094)
载人飞船钝头体返回舱减速着陆组合方式对比
石泳1,2刘哲2陈伟跃2郭斌2
(1 南京航空航天大学航空宇航学院,南京 210016)
(2 中国空间技术研究院载人航天总体部,北京 100094)
载人飞船返回舱减速着陆方式的选择直接关系到航天员的生命安全,是载人飞船总体方案设计中至关重要的一个环节。文章调研了美国、俄罗斯等国正在研制的新一代载人飞船减速着陆设计方案,以国际上广泛采用的钝头体外形返回舱减速着陆设计为研究对象,并以7t量级的钝头体外形返回舱减速着陆过程为例,对比分析了群伞减速组合气囊缓冲着陆、群伞减速组合反推发动机缓冲着陆、翼伞减速组合滑撬缓冲着陆、发动机减速组合着陆腿缓冲着陆、群伞减速组合发动机和着陆腿缓冲着陆、群伞减速组合发动机和气囊缓冲着陆等六种减速着陆组合方式的特点,估算了每种组合的系统质量和容积需求,并从系统质量、空间布局、环境适应性、可靠性安全性、舱体损伤程度等方面对不同方案进行了比较分析,为飞船总体设计部门开展返回舱减速着陆方案设计提供参考。
载人飞船 钝头体 返回舱 再入返回 减速着陆 组合型式
0 引言
随着“神舟号”载人飞船从试验性飞行进入到应用性飞行,我国的载人天地往返运输系统已逐渐走向成熟,我国已突破并完全掌握了载人天地往返、载人空间交会对接、出舱活动等关键技术,为我国自主建设空间站奠定了坚实的基础[1-2]。
我国“神舟号”载人飞船在立项之前曾对返回舱的减速着陆方式进行过多方案比较,基于返回舱居中的三舱方案,最终选择了降落伞减速与反推发动机缓冲着陆的方式,并通过历次任务考核,均实现了安全着陆。
当前,美俄等国均在加紧研制功能和性能更强的新一代飞船[3-10],瞄准空间站服务、载人登月及深空探测等多个领域,预计在2018年前后将具备载人飞行能力。载人飞船返回舱回收着陆方式直接关系到航天员的生命安全,美俄等国在研的载人飞船在减速着陆方式选择上都非常慎重。我国在未来研制新一代载人飞船时也应慎重选择减速着陆方式[11]。
钝头体外形的返回舱再入返回过程先利用舱体外形产生的气动阻力减速至亚声速,再利用降落伞、发动机等其他方式进一步减速,触地时还可用气囊、着陆腿等方式进行缓冲,最终以安全速度实现软着陆。减速方式主要有群伞减速、翼伞减速及发动机减速;缓冲着陆方式有气囊缓冲、反推发动机缓冲、滑橇缓冲及着陆腿缓冲。通过对减速和着陆方式进行组合,主要有以下六种减速着陆组合方式:群伞+气囊、群伞+反推发动机、翼伞+滑撬、反推发动机+着陆腿、群伞+反推发动机+着陆腿、群伞+反推发动机+气囊[6-9,12-16]。
本文以钝头体外形的大型返回舱(返回质量和外形尺寸均超过“神舟号”载人飞船返回舱)的减速着陆过程为研究对象,对上述六种不同类型的减速着陆组合方案进行了初步设计,并从系统质量、空间布局、环境适应性、可靠性安全性等方面对不同方案进行了比较分析,为未来我国新一代载人飞船返回舱减速着陆方案设计提供参考。
1 国外载人飞船典型回收着陆方式
自航天飞机退役以后,俄罗斯“联盟号”飞船和我国的“神舟号”飞船成为仅有的两种往返于地面与近地轨道的载人飞行器,在国际空间站运营过程中,美国和欧洲的人员输运受制于俄罗斯,美国在天地人员输运能力上暂时表现为一个空白期。为改变这种被动局面,美国近年来大力发展多种新型载人航天器,按照其发展规划,NASA致力于地球以远任务,在“猎户座”飞船方案的基础上研制多用途飞船[8-9,17](Multi-Purpose Crew Vehicle,MPCV),具备完成近地轨道、地月空间、月球、小行星、火星及附近区域探测任务和人员输运的能力。同时NASA为完成近地轨道任务启动了“商业乘员发展计划”(Commercial Crew Development,CCDev),美国Space X公司的“龙”飞船(Dragon)、波音公司的CST-100、内华达山脉公司(SNC)的“追梦者”飞船(Dream Chaser)先后入选该计划[6,8-9]。2014年,NASA签订了新一轮的商业载人运输合同,波音公司的CST-100和SpaceX公司的Dragon V2成功入选,而SNC公司的Dream Chaser最终落败。
与此同时,俄罗斯根据调整后的航天发展规划,停止了升力体飞船“快船”(Cliper)的研制,转而开展新一代载人飞船“PTK NP”的研制,设计目标兼顾近地和月球任务,旨在为“联盟号”研制更新换代产品,预计将于2018年进行飞行试验[7]。
1.1 MPCV飞船
MPCV是美国“星座”计划终止后计划开发的新型可重复使用载人飞行器,继承了“星座计划”的CEV方案技术,具备完成近地轨道、地月空间、月球、小行星、火星及附近区域探测任务和人员输运的能力[17]。
在堤坝施工中存在问题,造成堤坝形成渗漏。由于现时期多数堤坝都是建设于上个世纪,因为当时施工条件非常有限,造成最后施工质量较差;除此之外,因为当时社会环境方面的因素,对于施工进度却相对非常重视。这一时期所建设的堤坝,大都是一边规划设计、一边施工的,致使缺少良好的规范性和专业性。在这一时期中,工程的施工理念基本都是尽快完工、并且还要最大程度的节约成本,由此使施工水平明显降低,对于特殊情况并没有过多的考虑。因为施工上的不规范,造成堤坝渗漏情况经常发生,长期如此,较易产生严重的溃堤现象,为此一定要对施工加强重视。
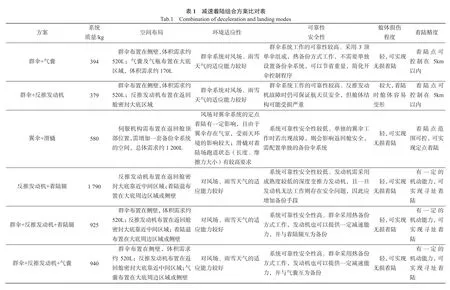
MPCV返回舱按重复使用10次进行设计,质量为8 913kg,再入过程采用半弹道跳跃方式,采用群伞减速,海上溅落的方式回收(见图1),陆上着陆作为备选方案,落点偏差均约10km。降落伞系统位于返回舱顶部,由2具弹射拉直的减速伞、3具通过弹射拉直的引导伞以及3具引导伞拉直的主伞组成。

图1 MPCV采用群伞减速、海上溅落的方式回收Fig.1 MPCV spacecraft decelerated by cluster parachutes and splashing down onto the sea
1.2 CST-100飞船
CST-100是波音公司为满足CCDev计划而设计和制造的载人飞船,其设计的出发点不是要运用或者发明新的技术和设备,而是采用成熟的技术和硬件,确保飞船安全性和可靠性。波音考虑更多的是安全、可靠、低成本而不是先进的性能。
CST-100返回舱按重复使用10次进行设计,采用群伞+气囊的着陆减速方式,在陆上回收,海上回收作为备选方案。再入地球大气后,CST-100的3具主伞在约3.7km高度处展开,返回舱下降至1.5km时,防热大底被抛掉,6个安全气囊在返回舱着陆前的2min由氮和氧混合气体快速填充,用于减轻着陆时的冲击。CST-100采用群伞+气囊的减速着陆方式,见图2。

图2 CST-100飞船采用群伞+气囊的减速着陆方式Fig.2 CST-100 spacecraft decelerated by cluster parachutes and adopting gasbags against impact
1.3 Dragon V2飞船
Space X公司首先开发了货运版的Dragon飞船,与MPCV类似,Dragon飞船返回舱也采用了群伞减速、海上溅落的回收方式,如图3所示。2具减速伞在约13.7km高度处展开,3km高度处分离拉出主伞;每具主伞伞衣直径为35.4m,可将飞船速度减至4.8~5.4m/s。
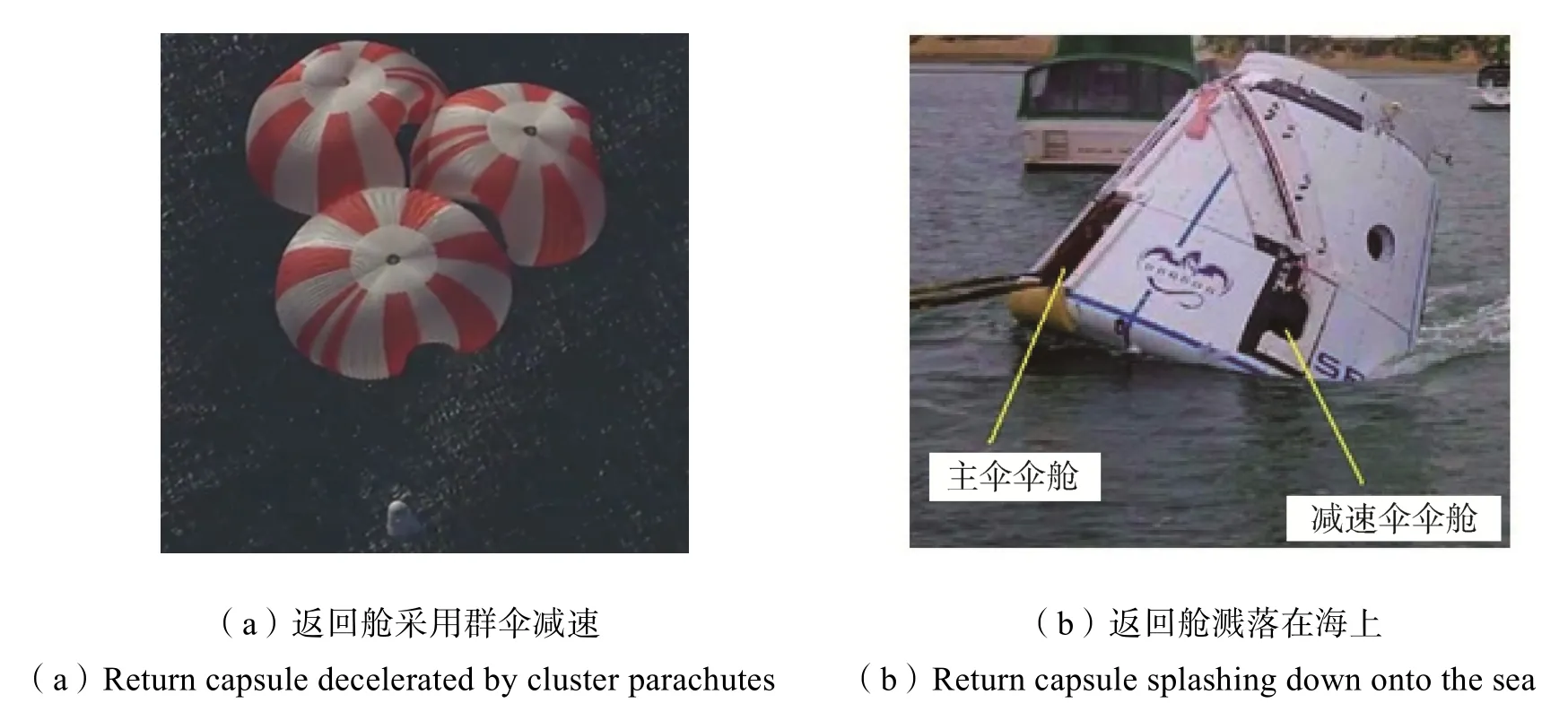
图3 Dragon飞船采用群伞减速、海上溅落的方式回收Fig.3 Dragon spacecraft decelerated by cluster parachutes and splashing down onto the sea
2014年5月30日,Space X公司公布了其载人版Dragon V2的设计方案,Dragon V2飞船仍采用钝头体外形,返回舱完全可重复使用10次,只需重新加注推进剂即可重新使用。返回舱先通过气动减速,距地面数千米时利用集成在返回舱的Super Draco逃逸发动机进行着陆反推减速,着陆时利用着陆腿实现软着陆。Dragon V2采用发动机减速,如图4所示。为确保安全,返回舱还配置了降落伞以备发动机故障时使用。Space X公司宣称Dragon V2能够在全球任意位置定点着陆,着陆精度与直升飞机相当。

图4 Dragon V2飞船采用发动机+着陆腿减速着陆方式Fig.4 Dragon V2 spacecraft using retro-engines and landing legs to decelerate and land
1.4 PTK NP飞船
2009年初,俄罗斯航天局提出了研制未来载人运输系统的计划。在计划下,俄罗斯能源公司设计了PTK NP飞船方案。PTK NP飞船也采用两舱结构,飞船直径扩大到“联盟号”的两倍,近地轨道任务的乘员数为4人,整船质量14.4t,货运质量500kg。
在之前的设计中,PTK NP飞船首先通过点燃脱离轨道发动机使其减速,之后推进舱将在大气层内被抛弃并烧毁,而返回舱进行再入和减速,降落过程中通过使用固体推进发动机实现软着陆。具体步骤为先抛掉防热大底,露出着陆发动机喷管和着陆腿,之后飞船将在反推发动机工作后,使用着陆腿降落(如图5(a)所示)。如果反推发动机点火失败,PTK NP将紧急打开备份的降落伞装置实施减速。考虑到备份降落伞的规模不宜过大,在启用备份降落伞减速时需要将包括着陆发动机在内的软着陆推进装置分离。

图5 PTK NP着陆缓冲火箭减速着陆Fig.5 PTK NP spacecraft landing using retro-rocket to decelerate
但在2013年,PTK NP飞船放弃了着陆过程中完全依靠固体发动机减速的初始方案,而采用群伞+发动机+着陆腿的减速着陆组合方式;以三重降落伞展开减速为主,以推进式着陆为辅。推进式着陆系统将仅在地表以上高度10m处启动并提供软着陆能力。不同于“联盟号”飞船上在触地前瞬间点火的小型软着陆发动机,PTK NP飞船的固体推进剂发动机还将具有精密的推力控制及更强的控制着陆速度、确切着陆点的能力。另外,聚合隔舱还有可折叠的着陆支腿,用于缓冲乘员舱的触地冲击力,可重复用于10次任务。
1.5 小结
通过上述四种国外在研的载人飞船回收着陆方案可以得出如下启示:
1)基于可靠性、安全性和技术成熟度考虑,除Dragon V2飞船采用发动机减速为主的方案以外,其余三种均采用群伞减速的方案;
2)四种飞船都提出了返回舱重复使用的要求,因此也更加注重减少着陆冲击对舱体的损伤,CST-100飞船采用气囊缓冲,Dragon V2飞船和PTK NP飞船采用着陆腿缓冲的方式,MPCV飞船则选择溅落在海上。
2 不同减速着陆组合方式的对比分析
2.1 方案初步设计及对比
为便于对比分析,参考上述国外载人飞船返回舱的规模,假设一组设计条件:返回舱为钝头体外形,返回质量不大于7t;能够适应雨雪及大风天气条件;要求着陆后返回舱主结构及设备无损伤,便于后续重复使用。
本文针对上述设计条件开展了群伞+气囊、群伞+反推发动机、翼伞+滑撬、反推发动机+着陆腿、群伞+反推发动机+着陆腿、群伞+反推发动机+气囊等六种减速着陆组合方案的初步设计,估算了系统质量和体积需求,并对环境适应性、可靠性安全性、舱体损伤程度等方面进行了系统分析,主要结果见表1。
2.2 方案设计结果分析
通过上述方案对比可知:
1)从系统质量分析,“发动机+着陆腿”的组合方案系统质量最大为1 790kg,其次依次为“群伞+反推发动机+气囊”方案、“群伞+反推发动机+着陆腿”方案、“翼伞+滑橇”方案、“群伞+气囊”方案,其中系统质量最轻的是“群伞+反推发动机”的组合方案。
2)从空间布局分析,系统空间布局所需体积最小的是“群伞+反推发动机”方案;“翼伞+滑橇”方案所占体积最大,翼伞主伞、执行机构、备伞所占体积将导致其它设备在非密封舱内布局受到很大限制;“群伞+反推发动机+气囊”和“群伞+反推发动机+着陆腿”两种方案的体积需求相当,其中解决反推发动机与气囊、着陆腿的布局位置协调问题难度较大;
3)从以上两条“系统质量”和“空间布局”分析,“群伞+反推发动机”方案应当入选最佳方案。虽然反推发动机具有技术成熟,质量较轻的优点,但是以目前的技术水平,没有替代γ源的低高度动态敏感器用于测量点火高度。γ源是有辐射性的,对航天员的安全存在不利影响。另外,虽然这种方案结构简单、减速高效、工作可靠和成本较低,但以“神舟号”历次飞行经验来看,返回舱大底结构在着陆时会发生变形,影响返回舱结构重复使用。
4)从环境适应性分析,“翼伞+滑橇”的组合方案环境适应性最差。翼伞减速系统的寻址能力强、着陆精度高,可通过雀降实现低速着陆,但使用受制于风场和雨雪天气,同时在消除残余水平着陆速度上存在技术难题。与翼伞配合的滑橇方式着陆缓冲,其质心相对较高,在地面有障碍物的情况下,水平滑行的稳定性差;滑橇是非全向的,基本用来缓冲纵向冲击,缓冲横向冲击能力差。而且,滑橇对着陆场跑道状态(长度、摩擦力大小)有较高要求,跑道与滑橇摩擦力过大,在有水平着陆速度的情况下,返回舱在滑行时有倾倒的风险;跑道与滑橇摩擦力过小,则需要修建足够长的跑道,以保证返回舱能平稳停下。这种高规格的跑道无论是在建设还是后期保养上都要耗费大量人力物力。
5)从可靠性和安全性分析,“群伞+反推发动机+气囊”和“群伞+反推发动机+着陆腿”的组合方案在减速段3具伞可以采用3取2的方式冗余,着陆缓冲过程反推发动机和着陆腿、发动机与气囊可以做到互为备份,因此该方案具有一定优势;而“反推发动机+着陆腿”的方案必须配置备份降落伞,否则一旦发动机故障则存在安全性问题。
6)从着陆精度分析,“翼伞+滑橇”方案可以控制落点范围,实现定点着陆;“反推发动机+着陆腿”方案可以实现一定程度的水平机动能力,可实现寻址着陆;“群伞+反推发动机+着陆腿”方案有一定的蔽障能力;“群伞+气囊”方案、“群伞+反推发动机”方案着陆点可控制在5km以内。
7)从性能提高和系统质量开销角度分析,“反推发动机+着陆腿”可实现百米级的定点着陆和寻址蔽障,性能最优,但其系统质量需要增加约1.2t,对于执行近地任务的飞行器而言,增加的质量需要额外消耗约145kg推进剂,尚可接受。对于以登月为代表的载人深空探测项目,其增加的质量需要额外消耗约1 000kg推进剂,综合考虑增加质量的代价和性能的提高,具备执行深空任务的多用途飞船应选择降落伞方案,通过提高返回再入段控制精度和伞降精度实现着陆精度的提升。采用着陆腿进行缓冲,需要着陆前初始速度很低,间接需要较强的减速能力,与之配合的发动机方案已经在前面论证过了。
3 结束语
六种组合都各有优势和不足,如果突出强调安全可靠和无损着陆,则“群伞+气囊”、“群伞+反推发动机+着陆腿”的方案都是比较好的选择;如果突出强调着陆寻址和无损着陆,则“群伞+反推发动机+着陆腿”的方案是较好选择。
References)
[1] 李颐黎, 戚发轫. “神舟号”飞船总体与返回方案的优化与实施[J]. 航天返回与遥感, 2011, 32(6): 1-13, 87. LI Yili, QI Faren. Optimization and Implementation of China SHENZHOU Spaceship’s System and Return Technology Scheme[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(6): 1-13, 87. (in Chinese)
[2] 荣伟, 王学, 贾贺, 等. “神舟号”飞船回收着陆系统可靠性分析中的几个问题[J]. 航天返回与遥感, 2011, 32(6): 19-25. RONG Wei, WANG Xue, JIA He, et al. Some Problems for Reliability Analysis of Recovery and Landing System of the SHENZHOU Spacecraft[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(6): 19-25. (in Chinese)
[3] EMRE K. Crew Exploration Vehicle (CEV) Skip Entry Trajectory[M]. Biblio Scholar, 2008: ADA483248.
[4] KINNEY D. Impact of TPS Recession on the ORION CEV Aerodynamics[C]//47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, Florida, United States, 2009: AIAA 2009-1522.
[5] KELLY J M, KAREN B, BRAUCKMANN G J, et al. Orion Crew Module Aerodynamic Testing[C]//29th AIAA Applied Aerodynamics Conference, Honolulu, HI, United States, 2011.
[6] VOZOFF M, COULURIS J. SpaceX Products-advancing the Use of Space[C]//AIAA SPACE 2008 Conference & Exposition, San Diego, California, United States, 2008.
[7] 武尧尔. 俄罗斯全力打造新型载人飞船[J]. 太空探索, 2011, (2): 30-35. WU Yaoer. Russia Attempts to Develop New Spacecraft[J]. Space Exploration, 2011, (2): 30-35. (in Chinese)
[8] 易林. 美国新一代飞船撩开神秘面纱[J]. 太空探索, 2011, (8): 34-37. YI Lin. New American Spacecraft is Revealed[J]. Space Exploration, 2011, (8): 34-37. (in Chinese)
[9] 诸葛炎. 各国热衷打造新型载人飞船[J]. 科学大观园, 2009, (16): 73-75. ZHUGE Yan. A Number of Countries are Devoted to New Spacecraft. Grand Garden of Science[J]. Grand Garden of Science, 2009, (16): 73-75. (in Chinese)
[10] 张振华, 白明生, 石泳, 等. 国外商业航天的发展与启示[J]. 中国航天, 2015, (11): 31-39. ZHANG Zhenhua, BAI Mingsheng, SHI Yong, et al. Development and Revelation of Commercial Aerospace Abroad[J]. Aerospace China, 2015, (11): 31-39. (in Chinese)
[11] 杨雷, 张柏楠, 郭斌, 等. 新一代多用途载人飞船概念研究[J]. 航空学报, 2015, 36(3): 703-713. YANG Lei, ZHANG Bainan, GUO Bin, et al. Concept Definition of New-generation Multi-purpose Manned Spacecraft[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(3): 703-713. (in Chinese)
[12] DESAI P N, LYONS D T. Entry, Descent, and Landing Operations Analysis for the Stardust Entry Capsule[J]. Journal of Spacecraft and Rockets, 2008, 45(6):1262-1268.
[13] 梅昌明, 张进, 潘刚, 等. 载人飞船返回舱气囊缓冲多目标优化设计[J]. 载人航天, 2015, 21(5): 444-449. MEI Changming, ZHANG Jin, PAN Gang, et al. Multi-objective Optimization Design of Airbag Buffer in Return Capsule of Manned Spaceship[J]. Manned Spaceflight, 2015, 21(5): 444-449. (in Chinese)
[14] 郭斌, 左光, 程克明, 等. 载人飞船利用返回舱反推发动机制动缓冲方案参数初步分析[J]. 载人航天, 2013, 19(4): 17-22. GUO Bin, ZUO Guang, CHENG Keming, et al. A Preliminary Analysis on the Speed Reduction Scheme of the Retro-rocket Used by Re-entry Capsule[J]. Manned Spaceflight, 2013, 19(4): 17-22. (in Chinese)
[15] 黄伟. 反推发动机点火控制高度及其随机偏差分析[J]. 航天返回与遥感, 2002, 23(3): 6-10. HUANG Wei. A Initial Ignition Altitude for Retrorocket and Its Random Deviation Analyzing[J]. Spacecraft Recovery & Remote Sensing, 2002, 23(3): 6-10. (in Chinese)
[16] 刘敏, 荣伟. 反推发动机布局对返回舱着陆姿态的影响分析[J]. 航天返回与遥感, 2010, 31(2): 1-9. LIU Min, RONG Wei. The Analysis for Retro-rocket Layout Effect on Return Capsule Landing Attitude[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(2): 1-9. (in Chinese)
[17] KELLY J, MURPHY, KAREN L, et al. Orion Crew Module Aerodynamic Testing[J]. AIAA Papaer 2011-3502, 2011.
Combination of Deceleration and Landing Modes for Return Capsule with Blunt Body of Manned Spacecraft
SHI Yong1,2LIU Zhe2CHEN Weiyue2GUO Bin2
(1 College of Aerospace Engineering. NUAA, Nanjing 210016, China)
(2 Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China)
Selection of decelerated landing modes of return capsule is directly relative to the safety of astronauts, so it is one of key parameters of scheme design. The deceleration and landing modes for the new ongoing manned spacecraft are investigated in the countries such as US, Russia. In addition, the modes are also designed and analyzed for the return capsule with blunt body, which is widely used in the world. By taking the reentry process of a return capsule, 7 ton in weight, as an example, six deceleration and landing modes are introduced and compared in this paper, which are cluster parachute decelerating and gasbag landing, cluster parachute decelerating and retro-engine landing, winged parachute decelerating and sled landing, retro-engine decelerating and leg landing, and cluster parachute decelerating and gasbag landing with leg, and cluster parachute decelerating and retro-engine decelerating with gasbag landing. The weights and volumes of the six modes are estimated. Furthermore, the comparisons on system weight, room layout, environment adaptability, reliability, safety, and capsule damage of return capsule are given, which can provide references for preliminary design of deceleration and landing mode for return capsule.
manned spacecraft; blunt body; return capsule; reentry; deceleration and landing; combination
V423.5
A
1009-8518(2016)06-0020-08
10.3969/j.issn.1009-8518.2016.06.003
石泳,男,1979年生,2004年获清华大学工程热物理专业硕士学位,高级工程师。主要研究方向为航天器总体设计以及航天器进入、减速与着陆技术。E-mail: myplasma@126.com。
(编辑: 陈艳霞)
2016-05-21
国家重大科技专项工程
