磁流变减振器力学建模研究综述
2016-02-11张进秋孙宜权彭志召
张进秋, 彭 虎, 孙宜权, 张 建, 彭志召
(1. 装甲兵工程学院装备试用与培训大队, 北京 100072; 2. 装甲兵工程学院技术保障工程系, 北京 100072)
磁流变减振器力学建模研究综述
张进秋1, 彭 虎2, 孙宜权1, 张 建1, 彭志召1
(1. 装甲兵工程学院装备试用与培训大队, 北京 100072; 2. 装甲兵工程学院技术保障工程系, 北京 100072)
根据磁流变减振器(Magneto-Rheological Damper, MRD)的输入/输出特性建立准确的动力学模型是实现精确控制的关键手段之一。综述了当前MRD力学模型研究现状并对其进行了归类,分析了各类模型的优缺点,归纳了各类模型中存在的问题及改进措施。最后,讨论了MRD建模发展方向,认为建模过程中应充分考虑电流、频率、振幅和速度等因素,结合电流与阻尼力的输入/输出关系及MRD内部多物理场耦合特性,建立具有表达式简洁、控制效果好、模拟精度高且通用性强等优点的MRD力学模型,便于MRD的工程化。
磁流变减振器; 力学模型; 磁流变液
磁流变减振器(Magneto-Rheological Damper, MRD)具有较大的输出阻尼力、较宽的阻尼力动态变化范围、较快的响应速度、较低的能耗且具有“失效-安全”特性,既可作为被动耗能元件,又可作为半主动控制元件,在车辆振动控制等领域得到了广泛应用[1-4]。为了对MRD进行半主动控制,建立较为精确且易于控制的MRD力学模型是控制器设计及应用的关键手段之一。磁流变液(Magneto-Rheolo-gical Fluid, MRF)的力学特性受输入电流、振幅及激励频率的影响,发生流变后的复杂本构关系及其动态阻尼力表现出的强非线性增加了MRD力学模型建立的难度[5-7]。因此,目前还没有公认的MRD力学计算模型,大多是基于特定MRD、利用试验得到的数据,并采用一定的建模及优化方法获得MRD力学模型。基于此,笔者对当前国内外MRD力学模型研究现状进行梳理,分析各个模型的优缺点,并对其发展方向进行阐述,以弥补当前的不足,建立性能更为优越的MRD力学模型,为实现MRD的工程化应用奠定基础。
1 方程模型
1.1 简单方程模型
简单方程模型出现较早,其结构形式简单,易于理解和控制应用,代表模型有Bingham黏塑性模型及其改进模型[4]、Herschel-Bulkley模型及双黏度模型[6]等。
1.1.1 Bingham黏塑性模型
1987年,Stanway等[8]首次针对电流变减振器(Electro-Rheological Damper, ERD)力学模型的建立提出了Bingham黏塑性模型。由于MRD与ERD存在很多相似之处, Shames等[9]将ERD力学模型用于MRD。Bingham黏塑性模型可用于描述MRF的Bingham黏塑性特性模型[10-11],也可用于表示MRD阻尼力特性,如图1所示。
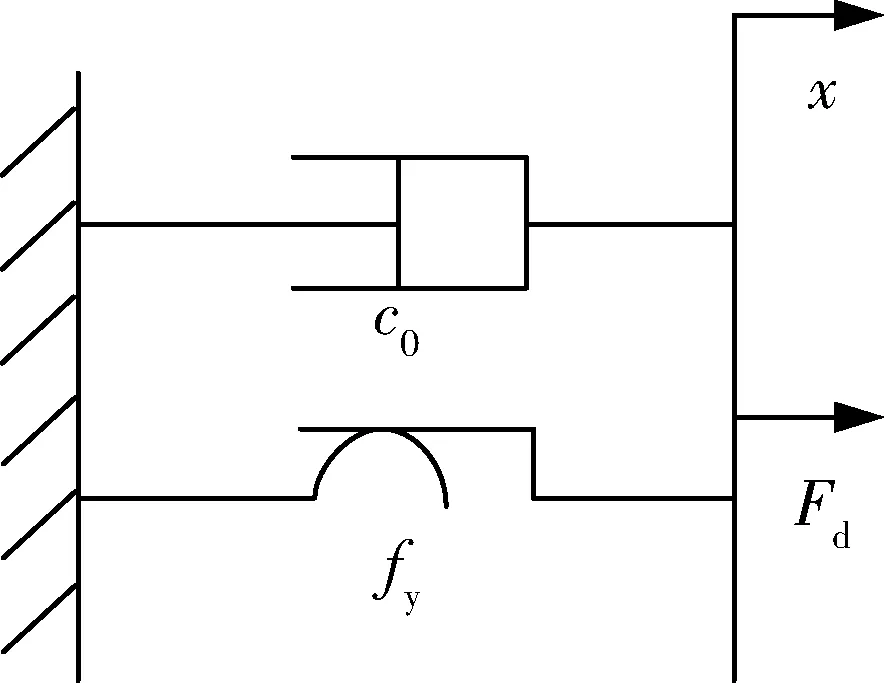
图1 Bingham黏塑性模型
Bingham黏塑性模型表达式为
(1)

Bingham黏塑性模型简单,主要描述MRD屈服后的特性,将力学模型表示成一个摩擦阻尼器和一个线性阻尼器的形式,能较好地反映阻尼力-位移关系,但不能反映对屈服前的剪切行为、剪切稀化现象及阻尼力-速度关系,精度较差,因此在实际半主动控制中应用较少。周强等[12]通过串联一个弹性元件描述MRF低剪切运动时的流变行为,建立修正Bingham模型,但Bingham黏塑性单元的位移难以确定。
1.1.2 Herschel-Bulkley模型
1926年,Herschel和Bulkley发现MRF在大应变率条件下存在剪切稀化现象(Shear Thinning),并以此为基础提出了一种描述此现象的黏塑性模型,称之为Herschel-Bulkley模型[6]。其表达式为
(2)

(3)
式中:μ反映剪切稀化的程度。该模型通过线性方程形式表示剪切稀化过程,避免了Herschel-Bulkley模型繁琐的指数计算过程,因而其实用性更强。
1.1.3 非线性滞回双黏度模型


图2 非线性滞回双黏度模型
非线性滞回双黏度模型表达式为
(4)
式中:
分别为压缩及拉伸屈服速度。式(4)包括前3个方程组成的正加速度部分和后3个方程组成的负加速度部分[14]。
非线性滞回双黏度模型考虑了阻尼力-速度非线性滞回因素,与Bingham黏塑性模型相比,其模拟精度更高,但其分段的结构使得高速与低速之间的过渡区不够平滑;由于存在剪切稀化现象,导致MRF剪切屈服应力与磁场强度关系依赖实验数据:这些都不利于模型的实际控制使用。
1.1.4 米氏模型
为研究MRD非线性滞回特性,张香成等[15]综合考虑电流、位移和频率与阻尼力的关系,基于米氏方程建立了MRD米氏模型,其表达式为
(5)

1.2 方程组模型
与简单方程模型相比,方程组模型能更准确地模拟阻尼力-速度非线性滞回特性,反映MRD模型的本质特征,代表模型有Bouc-Wen模型[16]、Spencer现象模型[17]等。
1.2.1 Bouc-Wen模型
非线性滞回双黏度模型分段不连续,不能准确地表示MRD试验中所表现的光滑阻尼力-速度关系。Wen[16]提出的Bouc-Wen模型(如图3所示)可解决上述问题,且对低速条件下的阻尼力-速度滞回模型具有较好的模拟效果。
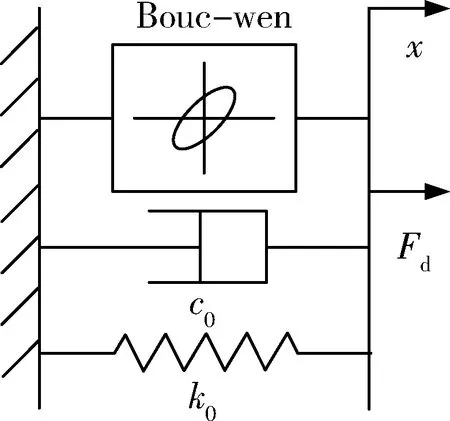
图3 Bouc-Wen模型
Bouc-Wen模型的表达式为
(6)
式中:α为由控制系统和MRF决定的系数;z为滞变位移;c0为MRD运动速度较大时的黏滞阻尼系数,k0为刚度系数,二者均为常数;γ、β、n和A均为模型参数,通过调整这些参数可控制阻尼力-速度曲线的形状和光滑度。
Bouc-Wen模型易于计算、通用性强且能反映阻尼力-速度滞回现象,因而得到了广泛应用。该模型的缺点为:基于试验数据建立的模型对不同的MRD所得模型存在差异,模型相对复杂,且不易于工程实用。此外,该模型仅适用于天棚“On-Off”控制,尚不能实现连续阻尼可调半主动控制。
在此基础上,文献[18-20]作者对Bouc-Wen模型进行了改进,考虑阻尼力、惯性力、剪切稀化效应、非线性特性及温升对MRF性能的影响等因素,但都无法从根本上解决Bouc-Wen模型存在的问题。
1.2.2 Spencer现象模型
为进一步提高Bouc-Wen模型的精度, Spencer等[17]在Bouc-Wen模型基础上做进一步的修正,提出了Spencer现象模型,如图4所示。
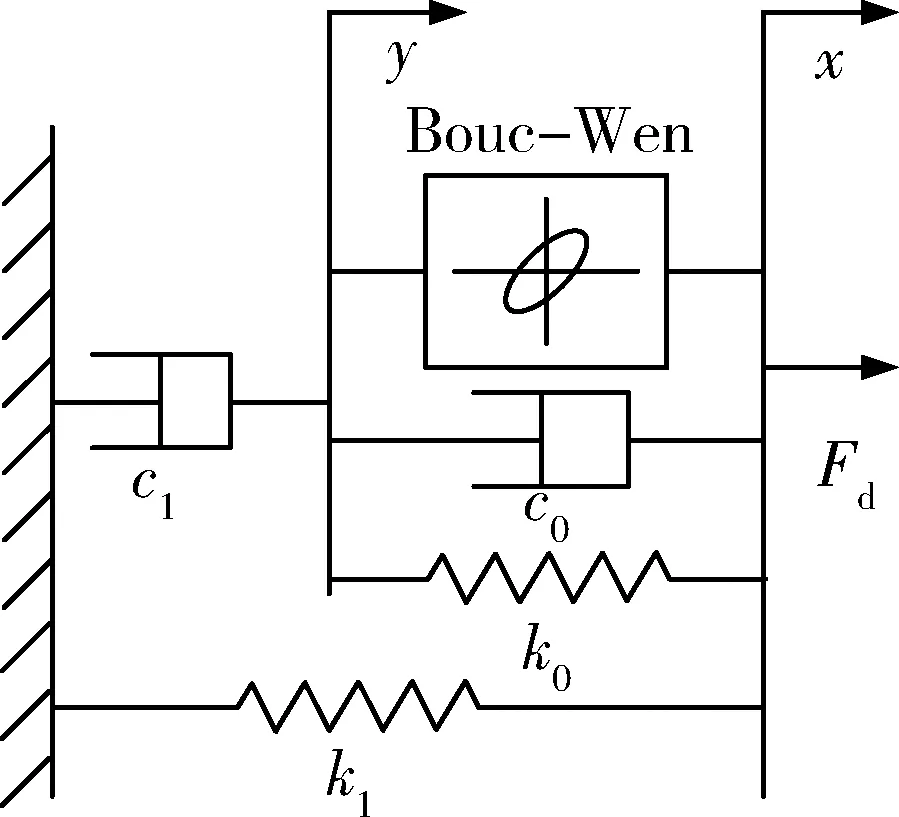
图4 Spencer现象模型
Spencer现象模型的表达式为
(7)
式中:k1为蓄能器刚度;x0为k1的初始位移;α、c0、c1与输入电压V相关,可用线性函数表示为
(8)
其中αa、αb、c0a、c0b、c1a和c1b均为模型参数。
Spencer现象模型将Bouc-Wen模型与阻尼元件串联后再与弹性元件并联,可很好地模拟阻尼力-速度滞回特性及阻尼力-位移特性,识别精度较高,适用于阀式MRD,其性能已在Lord公司RD21000型MRD得到证实[21]。Spencer现象模型能较好地描述双黏度特性及滞回特性,因此许多试验数据的获取和控制方法的应用都基于此模型。但Spencer现象模型表达式非常复杂,难以用于实际控制系统中。
1.2.3 修正Dahl模型
由于Bouc-Wen模型复杂,难以用于实际控制系统中,周强等[12]提出了修正Dahl模型,如图5所示,其原理是用Dahl滞回环取代Bouc-Wen滞回环,简化了微分方程表达式,使模型的实用性更强。
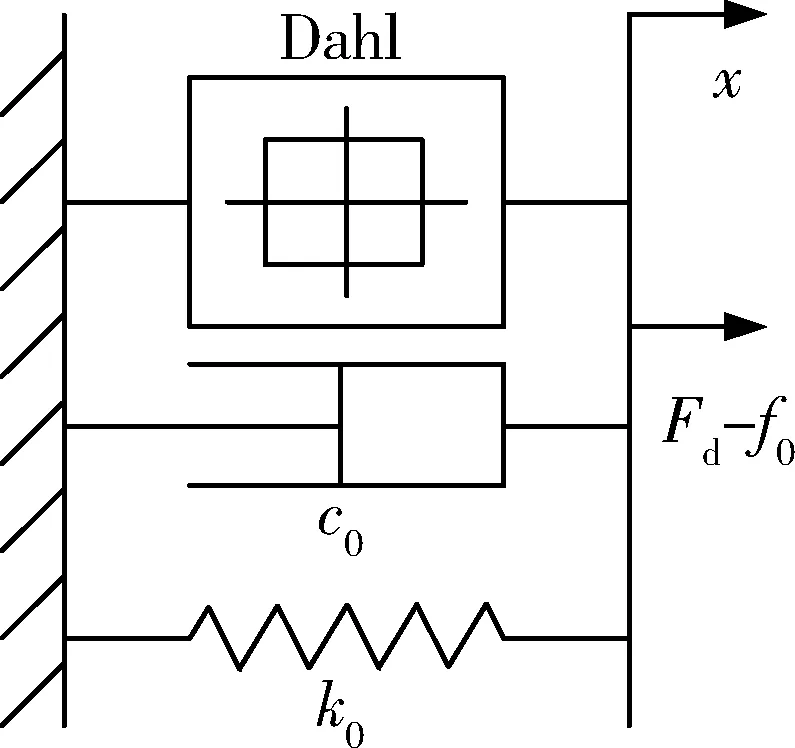
图5 修正Dahl模型
修正Dahl模型的表达式为
(9)

(10)
其中,c0s及fds分别为零场条件下的黏滞阻尼系数及黏滞阻尼力,c0d及fdd分别为加电条件下的库仑阻尼系数及库仑阻尼力,u表示模型参数与电流I的关系。与Bouc-Wen模型及Spencer现象模型相比,修正Dahl模型的表达式更简洁,虽然精度稍低,但仍能满足实际控制需求,有利于磁流变半主动控制的实施。
2 指数函数模型
2.1 Sigmoid及其改进模型
MRD的阻尼力-速度为非线性关系,徐赵东[20]等提出了一种易于程序化且能较好地模拟阻尼力-速度和阻尼力-位移关系的Sigmoid模型,如图6所示。
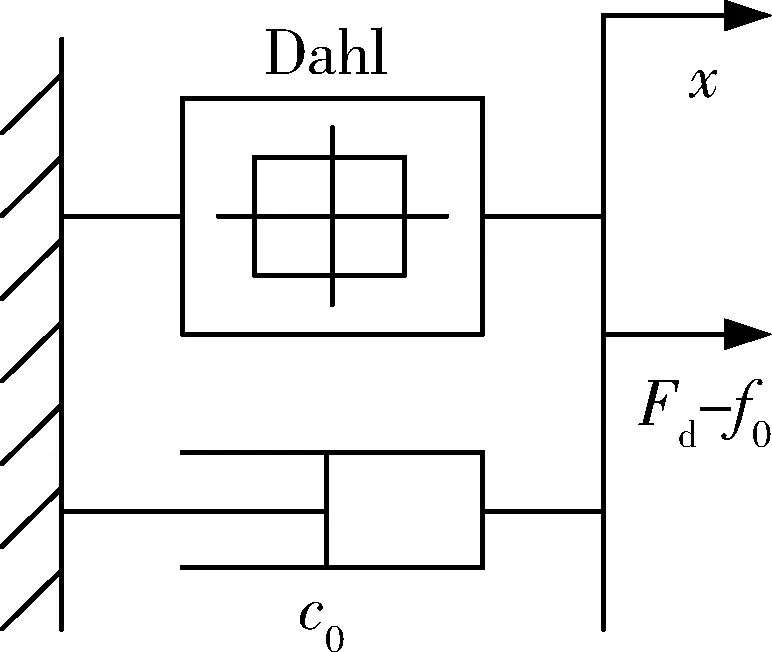
图6 Sigmoid模型
Sigmoid模型的表达式为
(11)
式中:Fm为最大屈服应力,β为指数系数,且β>0,二者均为与电流I和振幅X0相关的函数;v为MRD活塞运动速度。
为了识别MRD阻尼力-速度滞回模型,李秀领等[22]提出了一种改进Sigmoid函数模型,该模型表达式简洁,能够较为精确地模拟MRD阻尼力-速度、阻尼力-位移的关系,其表达式为
(12)
式中:cd为黏滞阻尼系数,可控制阻尼力-速度滞回曲线高速部分的斜率;xd为MRD阻尼力-速度滞回曲线上阻尼力为零时的速度值,可控制其低速滞回宽度;δ为库仑阻尼力部分速度调整系数,控制低速部分斜率。fd、cd、x0及δ均为待定参数。
该模型结构简单,对阻尼力-速度和阻尼力-位移曲线均有较高辨识度,但因未考虑激励频率和振幅的影响,不能完全适应外加载荷可变的条件。
2.2 修正Backlash滞环模型
针对MRD半主动控制中的非线性建模问题,潘双夏等[23]提出了一种修正Backlash滞环模型,其借鉴电磁学中的磁滞现象,引入动态Backlash-like模型描述阻尼力-速度滞回现象,考虑电流、频率、磁流变液屈服后的黏度及充气压力等因素,利用Sigmoid函数修正Backlash滞环模型,如图7所示。

图7 修正Backlash滞环模型
修正Backlash滞环模型的表达式为
(13)
式中:Fback为Backlash滞变力;sig(·)=(1-e-βv)/(1+e-βv),为Sigmoid修正函数;ks为可控阻尼增益系数;kgas为与充气压力有关的弹性系数;F0为与初始气体压力有关的偏置力。利用试验数据辨识该模型参数,得到的模型预测误差小于10%~15%,预测精度高且可控性好,但其缺点是双滞回模型的结构增加了参数辨识和模型求解的难度。
2.3 Gompertz模型
叶葱葱[24]考虑外加载荷的激励频率和幅值因素,利用增长型的Gompertz非对称S型曲线函数描述阻尼力-速度高速和低速非对称的滞回特性。Gompertz模型表达式为
(14)
Gompertz模型可较好地模拟MRD不同振幅和频率下的非线性滞回特性,考虑了输入电流和加载条件的影响,对阻尼力-速度和阻尼力-位移均能较好地辨识,尤其对阻尼力-速度滞回曲线中的低速与高速过渡区辨识度较高,模型结构简单,适用于MRD半主动控制。
2.4 组合模型
侯保林等[25]在Bingham本构塑性方程基础上,将MRD阻尼力分解为3部分,组合模型表达式为
(15)

该模型假设MRD阻尼力分为气囊力、磁流变黏滞阻尼力和磁场作用产生的阻尼力3部分,将气囊力表示为活塞位移相关的线性函数,磁场阻尼力表示为没有线性增长的可采用双曲函数描述的磁滞环,通过试验验证,该模型可较好地模拟磁流变阻尼力。
2.5 S型滞环模型
杨礼康等[26]提出了一种S型滞环模型,该模型根据非线性Bingham模型及非线性黏塑性模型中存在的活塞相对速度换向时阻尼力无平滑过渡的问题,利用神经元S型传递函数性质,弥补了Bouc-Wen模型不可用于连续阻尼可调半主动控制的不足。其表达式为
(16)
式中:F0为与安装方式相关的偏置阻尼力;tansgn(x)为神经元S型传递函数,将输入范围为(-∞,+∞)映到(-1,+1);α1为斜率调节参数;α2为与相对加速度方向相关的平移量调节参数。
S型滞环模型能较好地反映阻尼力-速度滞环特性,曲线光滑,易于控制,但该模型参数识别较复杂,神经网络的引入使反向模型求解困难。
3 多项式模型
3.1 一般多项式模型
一般多项式模型将MRD滞回环曲线分为上、下2部分,分别代表负加速度曲线和正加速度曲线,通过活塞速度对上述曲线分别进行多项式拟合,即可得到MRD一般多项式模型[27-29],如图8所示。
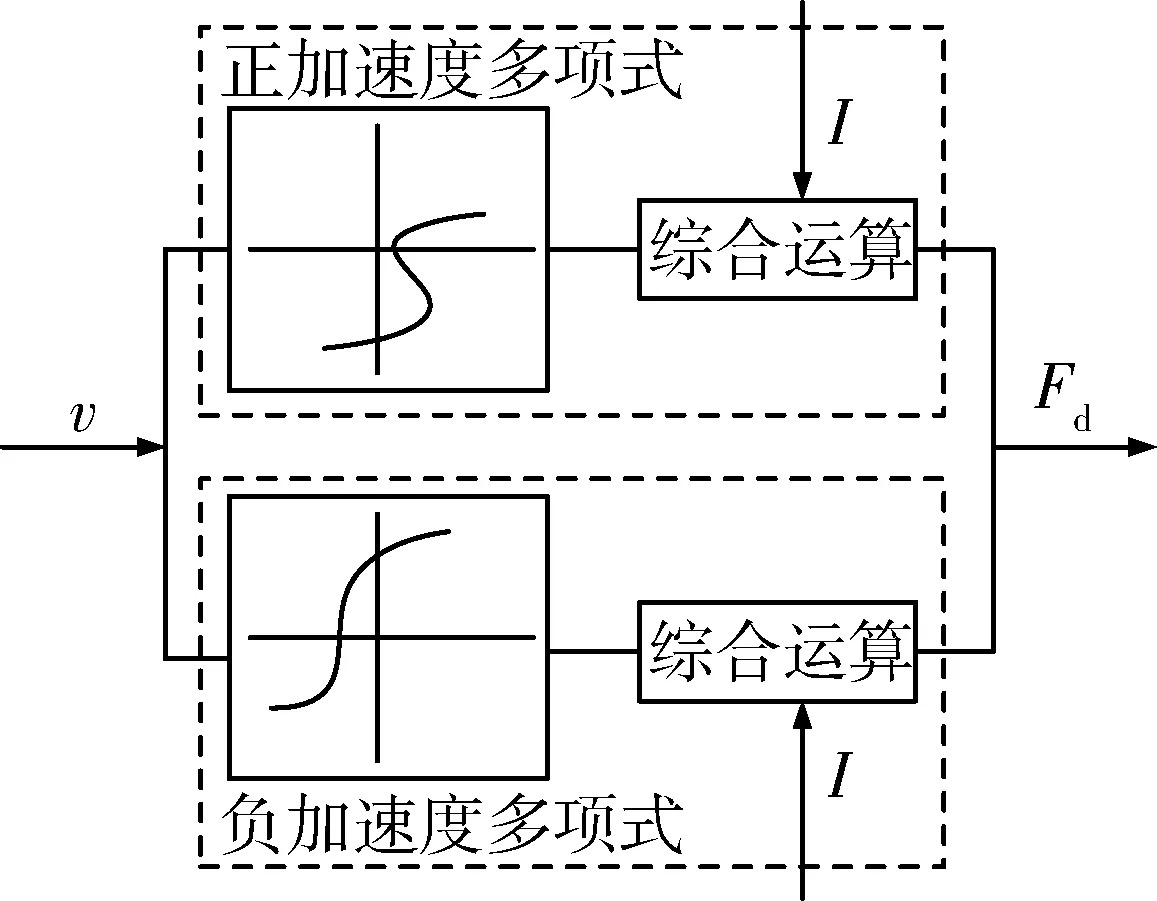
图8 一般多项式模型
一般多项式模型的表达式为
(17)
式中:Fd为MRD阻尼力;v为活塞运动速度;i=0,1,…,n,为拟合次数;ai为根据试验对曲线拟合的多项式系数;bi、ci由线性数据拟合得到;I为输入电流;n为多项式阶数,决定了拟合精度,取决于试验和误差,一般n>5,n越大,精度越高,但越容易出现曲线两端剧烈振荡的Runge现象。
Choi等[30]提出了一种能较好地描述MRD前屈服特征及非线性特性,且易推导其逆向动力学模型的多项式模型,该模型假设多项式系数与输入电流为线性关系,便于获得理想阻尼力。文献[31-34]作者利用MRD试验数据拟合并建立了MRD多项式模型,结果表明:该模型能较好地反映速度滞回特性,对控制电流求解的逆向性好,易于实现开环控制。
采用多项式拟合阻尼力-电流模型,将多项式系数与输入电流假设为线性关系,将MRD阻尼力视为以活塞速度为自变量的一元高阶次多项式,表达式简单,控制直接,不需要确定和识别诸多参数,但需要高阶次才能达到可接受的精度,然而高阶次又会出现曲线两端剧烈振荡的Runge现象[35-36]。
3.2 分段多项式模型
Choi等[30]认为6次以上的多项式模型就可以反映阻尼力-速度滞回特性。但周铁明[37]在实际应用中发现:6次多项式和9次多项式精度差别较大,后者仍未能满足精度要求,阶次达到12次时能达到较好的拟合效果,但当速度绝对值较大时,出现了剧烈振荡的Runge现象,为解决振荡问题,提出了改进的3阶次分段多项式模型,其表达式为
(18)
式中:ad1、ad2、ad3、au1、au2、au3分别为各段多项式系数;将阻尼力-速度曲线分为6段,v1、v3为减速时2个转折处的速度值,v2、v4为正加速度时该分支曲线2个转折处的速度值,均为与电流I相关的函数。
当采用分段多项式方式达到一般多项式模型同等精度时,可降低阶次并消除Runge现象,但存在控制不连续现象,因此在保证精度的同时解决Runge现象,并使控制简便、连续是多项式模型需解决的问题。
2.3 复合多项式模型
一般多项式模型中系数αi只受电流I影响,无法反映激励频率和振幅对模型的影响,从Choi等[30]所建模型可以看出:当频率f和振幅A的乘积稍微变化时,就会出现较大的误差。姚嘉凌[38]考虑利用bi和ci来反映频率和振幅的乘积关系,建立的复合多项式模型表达式为
(19)
式中:bi=αi(A×f)βi,ci=γi(A×f)δi,其中αi、βi、γi、δi为拟合参数。
复合多项式模型加入了频率及振幅因素,在频率及振幅改变、输入电流不同的情况下能较准确地预测MRD阻尼力,并可利用阻尼力-电流逆模型实现开环控制。
4 智能算法模型
智能算法模型利用模糊及神经网络等智能算法的自学习能力,根据MRD输出阻尼力与位移、速度、电流的关系,建立具备反馈优化、自学习及自适应能力的MRD力学模型[39-41]。
文献[42-44]作者采用自适应神经模糊理论(Adaptive Neuro-Fuzzy Inference System, ANFIS)表示特定电压下MRD输入/输出关系,以及电压变化条件下阻尼力的输出等级,提高了辨识精度,误差不超过3%。文献[45-49]作者分别采用BP(Back Propogation)神经网络和RBF(Radical Basis Function)神经网络对MRD逆向模型进行参数辨识,利用遗传算法对参数进行寻优,模拟其非线性特性,结果表明:优化后的神经网络模型预测精度和泛化能力得到显著提升。BP对目标电流的预测误差超过40%,而RBF预测误差不超过5%,同等条件下RBF神经网络逆向模型能够更好地预测MRD所需的控制电流。文献[50-51]作者利用广义回归神经网络(Generalized Regression Neural Network, GRNN)进行MRD模型的辨识,通过台架试验获得力学特性数据并建立神经网络正逆模型,结果表明:与反向传播神经网络相比,GRNN模型结构简单、收敛快速,建立的模型能够为MRD研究提供参考。姜康等[52]针对MRD现象模型的逆模型建立和PID参数整定问题,提出了基于自适应神经模糊推理系统(Adaptive Net-workbased Fuzzy Inferense System, ANFIS) 建立的逆向模型和ANFIS-PID控制器,结果表明:该控制器能有效改善簧载质量加速度、悬架动行程和轮胎动变形。
利用模糊的解决非线性时滞问题的特性、神经网络的反馈预测性能以及遗传等优化算法的参数寻优能力,能够建立较为精确的MRD逆向模型,但是需要考虑模糊依赖人为经验、神经网络抗干扰能力差、学习速度慢及易陷入局部极小点等问题。
5 存在的问题及讨论
国内外学者对MRD力学模型的建立有较为深入的研究,取得了一些成果。但MRF流变机理复杂且具有高度非线性,在工程化应用中存在如下问题:
1)实用性方面。给定位移、速度、电流/电压,在对MRD阻尼力进行正向建模时,有的模型简单,易于参数化实现,但并不精确,如Bingham黏塑性模型;有的模型能较好模拟非线性特性,但参数过多,不便于数值处理,如Bouc-Wen模型;有的模型较为灵活且具备自学习能力,但计算耗时,时滞非常明显,如神经网络模型[53-55]。若建立的正向模型不简洁、精确,则通过逆向模型求所需控制电流/电压就会更难。
2)输出阻尼力精度及时滞方面。当前所建立的MRD力学模型多是采用正弦激励,基于同一减振器不同控制电流/电压、频率、振幅、速度条件下得到与速度、位移的关系,存在2方面问题:(1)MRD性能受温度、MRF沉降稳定性(主要影响导磁性颗粒的体积分数)等因素影响较大,许多学者将其设为定值,与实际存在较大差别;(2)可变参数多,同一模型中难以兼顾多重因素的影响,另外,MRD控制本身存在较大的时滞,考虑多因素必定会加大时滞,这对实时控制是不利的,会大大影响MRD的实际控制效果。
3)稳定性方面。影响MRD稳定性的因素很多,主要分为3类:(1)MRF性能,主要包括导磁性颗粒的形状、大小及其体积分数等;(2)MRD结构性能,包括磁路设计、磁场分布不均匀、拉伸及压缩方向MRF液体体积补偿差异,MRF与壁面压力-黏度作用及材料相变的影响等;(3)外部环境因素,主要指温度对MRD的影响。
MRD工作过程涵盖“磁、流、固、机”等多种物理场作用,除受磁场强度影响外,还受磁场分布、活塞结构和各组件材料等因素的影响。此外,MRD阻尼力受温度、内部压强、黏度特性以及磁-流-固界面耦合作用影响较大。当前的研究多是基于输入电流/电压与输出阻尼力之间宏观特性的建模,对于其内部流场和内部黏塑性变化过程的考虑较少。在通过MRD性能试验获取其输入/输出参数特性的基础上,利用ANSYS及ADINA等流体力学及有限元分析软件,充分考虑内部流场之间的耦合、流变过程及相互影响关系,建立表达式简洁且便于数值处理,能很好描述MRD低速条件下非线性滞回特性,参数易辨识且易于实际控制的MRD力学模型,将有利于MRD的工程化应用。此外,建模时考虑磁流变特性、拉伸和压缩条件下的液体流动与活塞及缸壁之间的关系、MRF剪切屈服强度及沉降稳定性能等因素也值得进一步研究和探讨。
[1] 周丽,张志成.基于磁流变阻尼器的结构振动优化控制[J].振动工程学报,2003,16(1):109-113.
[2] 何亚东.基于智能理论的建筑结构系统辨识、半主动控制及控制优化研究[D].天津:天津大学,2001.
[3] Zhang Z C,Zhou L.Neural Network Emulation of Inverse Dynamics for a Magneto-rheological Damper[J].J of Struct Eng,2002,128(2):231-239.
[4] 瞿伟廉,秦顺全,涂建维,等.武汉天兴洲公铁两用斜拉桥主梁和桥塔纵向列车制动响应智能控制的理论与关键技术[J].土木工程学报,2010,43(8):63-72.
[5] Hong S S,Wereley N M,Choi Y S,et al.Analytical and Experimental Validation of a Nondimensional Bingham Model for Mixed-mode Magnetorheological Dampers[J].Journal of Sound and Vibration,2008,312(3):399-417.
[6] Bossis G,Lemaire E,Volkova,H,et al.Yield Stress in Magneto-rheological and Electro-rheological Fluids:a Comparison between Microscopic and Macroscopic Structural Models [J].Journal of Rheology,1997,41(3):687-704.
[7] Wereley N M,Pang L,Kamath G M.Idealized Hysteresis Modeling of Electro-rheological and Magneto-rheological Damper[J].Journal of Intelligent Material Systems and Structures,1998,9(8):642-649.
[8] Stanway R,Sposton J L,Stevens N G.Non-linear Modeling of an Electro-rheological Vibration Damper[J].Journal of Electrostatics,1987,20(2):167-184.
[9] Shames I H,Cozzarelli F A.Elastic and Inelastic Stress Analysis[M].Englewood Cliffs:Prentice Hall,1992:120-122.
[10] Dyke S J,Spencer B F,Sain M K.Modeling and Control of Magneto-rheological Damper for Seismic Response Reduction[J].Journal of Smart Materials and Structures,1996,5(5):565-575.
[11] Lam H F,Liao W H.Semiactive Control of Automotive Suspension Systems with Magneto-rheological Dampers[J].International Journal of Vehicle Design,2003,33:50-75.
[12] 周强,瞿伟廉.磁流变阻尼器的两种力学模型和试验验证[J].地震工程与工程振动,2002,22 (4):144-150.
[13] 翁建生.基于磁流变阻尼器的车辆悬架系统半主动控制[D].南京:南京航空航天大学,2001.
[14] Pang L,Kamath G M.Wereley N M.Dynamic Characterization and Analysis of Magneto-rheological Dampers Behavior[C]∥DAV ISLP.Proceedings of SPIE International Society Option Engineering.USA:Washington SPIE,1998,3327:284-302.
[15] 张香成,徐赵东,王绍安,等.磁流变阻尼器的米氏模型及试验验证[J].工程力学,2013,30(3):251-255.
[16] Wen Y K.Method of Random Vibration of Hysteretic Systems[J].Journal of Engineering Mechanics Division,1976,102(2):249-263.
[17] Spencer B F,Dyke S J,Sain M K,et al.Phenomenological Model of a Magneto-rheological Damper[J].Journal of Engineering Mechanics,1997,123(3):230-238.
[18] Yan G G.Large Scale Magneto-rheological Fluid Damper for Vibration Mitigation Modeling Testing and Control[D].Notre Dame:University of Notre Dame,2001.
[19] Jansen L M,Dyke S J.Semi-active Control Strategies for MR Dampers Comparative Study[J].Journal of Engineering Mecha-nics,2000,126(8):795-803.
[20] 徐赵东,李爱群.磁流变阻尼器带质量元素的温度唯象模型[J].工程力学,2005,22(2):144-148.
[21] Barber D E,Faulk J L.Rheological Changes in LORD MR Fluids Resulting from Use in Damper Devices[C]∥Proceedings of 13th International Conference on Electro-rheological Fluids and Magneto-rheological Suspensions.Turkey:Ankara SPIE,2012:136-141.
[22] 李秀领,李宏男.磁流变阻尼器的双sigmoid模型及试验验证[J].振动工程学报,2006,19(2):168-172.
[23] 潘双夏,张伟谦,王维锐,等.基于修正Backlash滞环的磁流变减振器建模[J].工程设计学报,2010,17(4):258-262.
[24] 叶葱葱.磁流变阻尼器性能的力学模型[D].天津:天津大学,2009.
[25] 侯保林,王灵,Goncalves F D.一种磁流变阻尼器非参数模型[J].南京理工大学学报,2005,29(5):560-564.
[26] 杨礼康,潘双夏,王维锐,等.磁流变减振器滞环特性试验与建模方法[J].机械工程学报,2006,42 (11):137-143.
[27] Maciejewski I,Modeling and Control of Semi-active Seat Suspension with Magneto-rheological Damper[J].Vibrations in Physical Systems,2010,24(2):541-547.
[28] Metered H,Bonello P, Oyadiji S O.The Experimental Identification of Magneto-rheological Dampers and Evaluation of their Controllers[J].Mechanical Systems and Signal Processing,2010,24:976-994.
[29] Peng G R,Li W H,Du H,et al.Modeling and Identifying the Parameters of a Magneto-rheological Damper with a Force-lag Phenomenon[J].Applied Mathematical Modeling,2014,38(15):3763-3773.
[30] Choi S B,Lee S K.A Hysteresis Model for the Field-dependent Damping Force of a Magneto-rheological Damper[J].Journal of Sound and Vibration,2001,245(2) :375-383.
[31] 姚嘉凌,郑加强,高维杰,等.多项式模型磁流变减振器半主动悬架滑模控制[J].系统仿真学报,2009,21(8):2400-2404.
[32] 段敏,石晶,苏海华.汽车磁流变减振器的设计及多项式模型的研究[J].机械设计与制造,2011,11:36-38.
[33] 苏海华.汽车半主动悬架磁流变减振器力学模型的研究[D].锦州:辽宁工业大学,2011.
[34] 夏奇.汽车磁流变半主动悬架控制方法研究[D].重庆:重庆大学,2012.
[35] 江洪,刘如奎.磁流变半主动空气悬架混合天地棚控制策略研究[J].科学技术与工程,2014,14(28):135-138.
[36] 樊登柱,张凯,董应超.基于Labview 的磁流变阻尼器多项式模型的建立[J].拖拉机与农用运输车,2015,42(6):36-39.
[37] 周铁明.磁流变阻尼器的改进多项式模型及验证[J].振动与冲击,2014,33(7):221-226.
[38] 姚嘉凌.车辆磁流变半主动悬架系统理论和试验研究[D].南京:南京林业大学,2009.
[39] Truong D Q,Ahn K K.Identification and Application of Black-box Model for a Self-sensing Damping System Using a Magneto-rheological Fluid Damper[J].Sensors and Actuators:A,2010,161:305-321.
[40] 涂建维,瞿伟廉,邹承明.MR智能阻尼器试验研究及径向基网络模型[J].武汉理工大学学报,2003,25(1):43-46.
[41] 张泽旭.神经网络控制与MATLAB仿真[M].哈尔滨:哈尔滨工业大学出版社,2011.
[42] 高梅,王长征.ANFIS技术实现磁流变阻尼器的逆向建模及其应用[J].振动与冲击,2008,27(3):140-142.
[43] 郑玲,周忠永.基于自适应神经模糊的磁流变阻尼器非参数化建模[J].振动与冲击,2011,30(10):25-29.
[44] 潘公宇,杨海,徐腾跃,等.磁流变液阻尼器试验与建模研究[J].振动与冲击,2015,34(6):36-40.
[45] 王修勇,宋璨,陈政清,等.磁流变阻尼器的性能试验与神经网络建模[J].振动与冲击,2009,28(4):42-46.
[46] 徐健忠,王洪飞.基于神经网络的磁流变阻尼器逆控制研究[J].机电工程,2009,26(3):87-89.
[47] 廖英英,刘永强,刘金喜.磁流变阻尼器的神经网络建模及在半主动控制中的应用[J].北京交通大学学报,2011,35(6):67-71.
[48] 王春花.唐众.车辆主动悬架的BD神经网络自适应PD控制[J].计算机仿真,2009,26(5):274-277.
[49] 廖英英,刘永强,杨绍普,等.磁流变阻尼器逆向模型的建模、优化与仿真[J].振动、测试与诊断,2013,33(4):701-705.
[50] 王戡,郑玲,刘非.基于广义回归神经网络的磁流变减振器模型辨识[J].汽车工程,2013,35(7):619-634.
[51] 张自伟,郑玲,邓召学,等.基于磁流变悬置的整车建模与振动控制的研究[J].汽车工程,2014,36(10):1267-1273.
[52] 姜康,张腾,冯忠祥.半主动磁流变阻尼器悬架的一种ANFIS-PID控制策略[J].组合机床与自动化加工技术,2016,4(4):80-82.
[53] 张进秋,滕涛,黄大山,等.基于神经网络的磁流变减振器力学模型研究[J].中北大学学报(自然科学版),2015,36 (1):51-55.
[54] 要会娟,浮洁,张丽香.基于神经网络的磁流变阻尼器逆向模型辨识研究[J].计算机仿真,2015,32(12):408-412.
[55] Zareh S H,Abbasi M,Mahdavi H,et al.Semi-active Vibration Control of an eleven Degrees of Freedom Suspension System Using Neuro Inverse Model of Magneto-rheological Dampers[J].Journal of Mechanical Science and Technology,2012,26(8):2459-2467.
(责任编辑: 尚菲菲)
Review on Mechanical Modeling of Magneto-rheological Damper
ZHANG Jin-qiu1, PENG Hu2, SUN Yi-quan1, ZHANG Jian1, PENG Zhi-zhao1
(1. Brigade of Equipment Trial and Training, Academy of Armored Force Engineering, Beijing 100072, China; 2. Department of Technical Support Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
According to the input and output characteristics of Magneto-Rheological Damper (MRD), building accurate dynamic model is one of the key factors to realize accurate control. This paper summarizes the current research status of MRD mechanical model and classifies it, analyzes the advantages and disadvantages of each model, concludes the problems and improvement measures in each model. Finally, it discusses the development direction of MRD modeling, and fully considers the factors of current, frequency, amplitude and velocity in the process of model building. Combining the input-output relationship between current and damper force with multi physical field coupling feature in the MRD, the MRD mechanical model is built with simple formula, good control effect, high simulation precision and versatility, which is applicable to the MRD engineering.
Magneto-Rheological Damper(MRD); mechanical model; magneto-rheological fluid
2016-09-20
张进秋(1963-),男,教授,博士。
TB535
:ADOI:10.3969/j.issn.1672-1497.2016.06.007
1672-1497(2016)06-0031-08