汽车追尾模型的研究*
2016-02-07姜庆标伏云发
姜庆标, 伏云发
(1.南京工程学院 汽车与轨道交通学院,江苏 南京 211167;2.昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
汽车追尾模型的研究*
姜庆标1, 伏云发2*
(1.南京工程学院 汽车与轨道交通学院,江苏 南京 211167;2.昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
定义了疏于观察时间,分析计算前车的制动灯亮后,前后车辆在各个阶段行驶的距离,建立了汽车追尾的数学模型,得出结论:车辆行驶的速度、车间距离、疏于观察时间和驾驶员反应时间是造成汽车追尾的主要因素.MATLAB仿真结果与理论一致.提出了避免汽车追尾的措施.
汽车追尾;车间距离;疏于观察时间;驾驶员反应时间
汽车追尾是公路交通事故的主要形式[1-2],这不仅造成驾驶员个人的经济损失,同时也加重了交通拥堵状况.近年来,国内外对汽车追尾碰撞系统的数学模型研究有一定的进展,例如,郭海如等[3]提出的车距变化和汽车刹车制动力度之间自适应模糊神经网络算法;宋翔等[4]提出的基于IMM的改进TTC算法;还有分析汽车制动后各个阶段内行驶的距离,计算出确保汽车不发生追尾要保持的安全行车距离而建立的数学模型[5-8].但是汽车追尾模型比较复杂,同时也不够精确,未考虑驾驶员的某些因素.
1 疏于观察时间
对于产生汽车追尾的主要原因,对近1 000名有经验的驾驶员进行了调查,结果如表1所示.

表1 产生汽车追尾的因素Tab.1 Factors of rear-end collisions
从表1中,可以看出车距太近、速度太快和疏于观察前车车况这三个比例较高.在一般汽车追尾模型中都把前两个因素考虑在内,而疏于观察前车车况这一因素没有考虑.为了考虑这个因素,这里引入疏于观察时间的概念.疏于观察时间就是前车车辆的车况发生改变后,后行车辆的驾驶员由于主观或者客观原因未能及时发现,直到发现这一改变所花费的时间.正常情况下,前行车辆的制动灯光亮后,后车驾驶员就能立刻发现,这时就不存在疏于观察时间,或者说疏于观察时间为零;同样,当这一过程的时间很小时,也可以忽略.但是如果由于后车驾驶员开小差、打瞌睡、看手机、低头捡东西等主观原因,或者前车制动灯不够醒目、大雾、视线被遮挡等客观原因,不能及时发现制动灯光信号,那么就存在疏于观察时间了,从而存在较大的汽车追尾风险.疏于观察时间出现的概率很低,并且与驾驶员的心理状况、身体疲劳状态、注意力、个人驾驶习惯、性格、年龄和驾驶经验等有关,其与驾驶员反应时间容易混淆,往往被研究者忽略.
2 汽车追尾模型

汽车追尾就是指后行车辆制动不及时,撞上了前行车辆(如图1所示).这里只要计算出前行车辆和后行车辆在前车制动灯光亮了以后两者的行驶距离,就能够判断是否会发生汽车追尾事故.因此,分析研究前行车辆和后行车辆的制动全过程就非常关键,通常汽车制动包括四个阶段:驾驶员看到前车制动信号后作出行动反应、制动器起作用、持续制动和放松制动器[9].正常制动就是为了刹车减速,减小汽车行驶过程中的安全隐患,在安全隐患解除时,汽车并没有停下来,存在放松制动器这一阶段.而紧急制动往往持续制动,直到汽车停下来,不存在放松制动器阶段.很明显,当前行车辆紧急制动时,容易发生汽车追尾事故.因此,在研究汽车追尾时,只考虑紧急制动,即不考虑放松制动器阶段.
2.1 前行车辆的制动距离
设前车车辆的初速度为v1,制动时产生的最大制动加速度为a1max.这里无需考虑前行车辆驾驶员的反应时间.

2.2 后行车辆的制动距离
设后行车辆的初速度为u1,制动时产生的最大制动加速度为a2max.下面分析各个阶段车辆行驶的距离.
2.2.1 疏于观察时间τ0后行车辆的驾驶员是否存在疏于观察时间,要根据当时的实际情况考虑.正常情况下,出现疏于观察时间的概率是非常低的,若没有出现,就认为其值为0;但是一旦存在,其大小就会比其他阶段大,汽车追尾的概率就很高.在这个期间,行驶的距离为:y0=u1τ0.
2.2.2 驾驶员反应时间τ1后行车辆的驾驶员接收到前车的制动信号,要经过一定时间,才会意识到要去紧急制动,然后再去踩着刹车踏板,这个过程中花费的时间就是驾驶员的反应时间,其值一般为0.2 s以上.在这个阶段汽车行驶的距离为:y1=u1τ1.

2.3 汽车追尾的主要因素
设前行车辆和后行车辆之间的距离为S,只要保证前车制动灯发光后,后行车辆的行驶距离和前行车辆的行驶距离之差小于S,那么就不会产生汽车追尾.得到:
y0+y1+y2+y3-(S2+S3) (1) 考虑到实际情况下同一车道的前后车辆的车速基本一样,即v1=u1;如果前后车辆的性能基本一致,即各个阶段的时间基本相等,最大制动加速度也相等;那么(1)就可以简化为: v1(τ0+τ1) (2) 其中是S为两车初始距离,v1为两车的初始速度,τ0和τ1分别是后行车辆驾驶员的疏于观察时间和驾驶员反应时间. 从(2)中可看出车辆行驶的速度、车间距离、疏于观察时间和驾驶员反应时间是造成汽车追尾的主要因素,同时,这几个因素之间是相互关联的,不是相互独立的.驾驶员反应时间一般是0.3 s左右;而疏于观察时间是随机出现的,其大小也是随机的,与驾驶员自身的心理状态和身体状况等主观原因,以及周围车辆状况、道路状况等客观原因都有较大关联性,具有不确定性,不过其出现概率很低的.但是疏于观察时间一旦存在,其值就会比驾驶员反应时间大得多,会起到主导作用. 《中华人民共和国道路交通安全法实施条例》第八十条规定:机动车在高速公路上行驶,车速超过100 km/h时,应当与同车道前车保持100 m以上的距离;车速低于100 km/h时,与同车道前车距离可以适当缩短,但最小距离不得少于50 m.按照其规定,车辆的速度为100 km/h时,车间距离应该为100 m.利用(2)计算出只要疏于观察时间不超过3.3 s(驾驶员反应时间设为0.3 s),就不会产生汽车追尾事故.正常情况下,驾驶员不会产生3.3 s这么长的疏于观察时间,但是如果驾驶员瞌睡或者酒驾时,3.3 s就不是很长的时间了,很容易发生追尾事故.同样,如果不存在疏于观察时间,那么只要车间距离大于8.3 m(驾驶员反应时间同样设为0.3 s),就不会产生汽车追尾事故.由此可见,虽然疏于观察时间出现的概率很低,但是它却是汽车追尾中最主要的因素.保持一定车距,就是为了预防疏于观察时间的出现,从而有效地避免发生汽车追尾事故. 利用MATLAB软件编程,对汽车追尾过程进行仿真,验证(2)是否正确,是否具有实际意义.设定前后车辆的性能相同,两车相距100 m,车速都是100 km/h,驾驶员的反应时间为0.3 s,当前车紧急制动时,由(2)计算可知,不发生汽车追尾事故,理论上允许的后车驾驶员的疏于观察时间最大值为3.2 s.在计算机仿真时,疏于观察时间取3 s,制动器的作用时间取为0.2 s,最大制动加速度为7 m/s2,其仿真结果如图2所示,两车没有发生追尾事故.理论和仿真结果一致. 如果没有疏于观察时间,其他条件不变时,两车相距仅为10 m,理论上也不会产生追尾事故,其仿真结果如图3所示,最后停下来时,两车相距很近,但没有发生追尾事故.由此可知,产生疏于观察时间,保持足够的距离就可以避免汽车追尾;车间距离很小,集中注意力,也不一定发生追尾.(2)是判断汽车追尾的关键,这几个因素相互关联,而疏于观察时间是关键因素.如果能够减小或者消除疏于观察时间,就能够有效地控制汽车追尾事故发生. 如何减小和避免汽车追尾事故的发生,从(2)中可看出疏于观察时间是其中变化最大、最重要的因素.因此减小或者消除疏于观察时间,就是控制汽车追尾最有效的措施. 1) 加强驾驶员安全教育和学习,了解疏于观察时间存在的客观性.改变驾驶过程中不良习惯,保持车距是预防其出现的必要措施. 2) 安装通讯设备,让前后车辆能够相互通信[10,11].这是消除疏于观察时间最有效的方法. 通过前行车辆和后行车辆紧急制动后在各个阶段行驶距离的分析,得出汽车追尾数学模型.简化后,其更简洁明了,即车辆行驶的速度、车间距离、疏于观察时间和驾驶员反应时间之间关系式.计算机仿真的结果与理论推导一致.同时提出了避免汽车追尾的措施.该汽车追尾数学模型具有很强的实用性,对以后汽车防撞系统研究具有一定的指导作用. [1] 马壮林,张宏璐,杨杨.高速公路追尾碰撞事故起数预测模型研究[J].中国安全科学学报,2015,25(4):58-59. [2] LI G, LI S E, CHENG B. Field operational test of advanced driver assistance system in typical Chinese[J].International Journal of Automotive Technology, 2015, 16(5):739-750. [3] 郭海如,李志敏,甘家梁.基于自适应模糊神经网络的防车追尾控制器[J].计算机仿真,2012,29(10):344-347. [4] 宋翔,李旭,张为公.高速公路汽车追尾碰撞预警关键参数估计[J].哈尔滨工程大学学报,2014,35(9):1142-1148. [5] 杨翠萍,官慧峰.高速公路汽车防撞系统的安全行车距离研究[J].自动化仪表,2008,29(9):19-21. [6] 吴新烨,葛晓宏,黄红武.高速公路防追尾安全行驶研究[J].厦门大学学报(自然科学版),2009,5(3):373-374. [7] 尹小琴,朱喜行,张盼盼.高速公路汽车防追尾碰撞系统的设计与控制研究[J].汽车工程,2014,36(9):1080-1084. [8] LEE D H, KIM S K, KIM C S, et al. Development of an autonomous braking system using the predicted stopping distance[J].International Journal of Automotive Technology, 2014, 15(2):341-346. [9] WANG Y G, CHEN K M, HU L W. Killer tailgating: recommendation of traveling intervals between consecutive motor vehicles for rear-end collision avoidance[J].Arabian Journal for Science and Engineering, 2012,37:619-630. [10] WANG P W, WANG L, LI Y H, et al. Improved cooperative collision avoidance (CCA) model considering driver comfort[J]. International Journal of Automotive Technology, 2015,16(6):989-996. [11] EZE E C, ZHANG S J, LIU A J, et al. Advances in vehicular ad-hoc networds (VANETs):challenges and road-map future development[J]. International Journal of Automation and Computing,2016,13(1):1-18. 责任编辑:龙顺潮 Research on Rear-end Collision JIANGQing-biao1,FUYun-fa2* (1.School of Automotive & Rail Transit;Nanjing Institute of Technology, Nanjing 211167;2. Faculty of Information Engineering and Automation, Kunming University of Science and Technology, Kunming 650500 China) No observation time of the driver of the rear vehicle is defined.A mathematical model of rear-end collisions is established, through the calculation of distances traveled by the front vehicle and the rear in different phases of the braking process after the brake lamp of the front vehicle lights. The model indicates that the main factors of rear-end collision are traveling speed, following distance, no observation time and driver reaction time. A simulation platform is built by MATLAB. The simulation results agree with the model. Two measures to avoid rear-end collision are proposed. rear-end collision;following distance;no observation time; driver reaction time 2016-01-11 国家自然科学基金项目(51405221) 伏云发(1970-),男,云南 昆明人,博士,副教授. E-mail:jiangqingbiao@163.com U491 A 1000-5900(2016)03-0074-04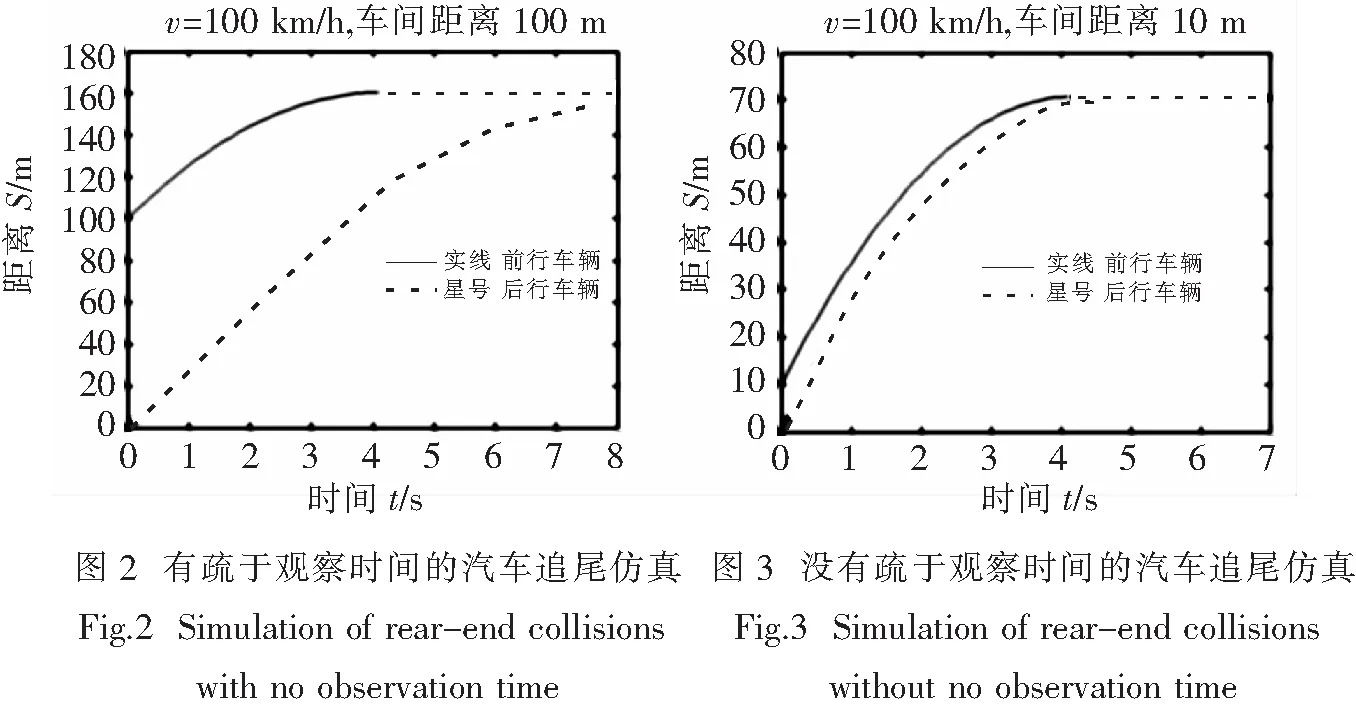
3 计算机仿真
4 避免汽车追尾的措施
