基于图像技术与粒子滤波融合新算法的机器人多目标跟踪*
2016-02-07姜道伟
姜道伟,袁 亮,巨 刚
(新疆大学 机械工程学院,乌鲁木齐 830047)
基于图像技术与粒子滤波融合新算法的机器人多目标跟踪*
姜道伟,袁 亮,巨 刚
(新疆大学 机械工程学院,乌鲁木齐 830047)
机器人的目标跟踪技术是机器人定位导航技术中的重要一环。为了能够精确的跟踪机器人的位置和速度信息,文章提出了一种多方法融合的粒子滤波算法。该算法是采用图像颜色直方图结合高斯核函数挖掘特征数据,融合粒子滤波改进算法自动追踪机器人目标。此外,为了解决粒子滤波中样本贫化,即在粒子滤波计算中很大一部分粒子重叠到一个单独的点上的情况,需要重采样计算解决此问题,但在重采样过程中容易造成一些粒子丢失各向异性导致跟踪精度降低,甚至跟踪目标失败,结合标准粒子滤波提出了一种新型重采样约束方法。实验结果表明,基于颜色分布改善后的粒子滤波算法能有效的减少样本分化问题,并且可以高精度的识别出移动、急转和相遇的机器人目标。
机器人导航;目标识别;图像技术;核函数;重采样约束法;颜色直方图
0 引言
目标跟踪是机器人导航的核心问题之一[1],是一种融合模式识别、图像处理、人工智能等领域的高新技术,在军事和民用领域都有广泛使用[2]。
目前,自动跟踪的算法有很多种类,比如卡尔曼滤波,扩展卡尔曼滤波[3],标准粒子滤波算法等。Ke-jiaBAI和Wei-mingLIU[4]在标准粒子滤波中融合MeanShift算法,解决了粒子衰减问题;M.SanjeevArulamplam[5]提出了对复杂目标的跟踪方法;BingJU等人[6]在标准粒子滤波预测过程中对每一步粒子更新采用光滑状态估计法,使得基于建议分布粒子滤波算法更精确。上述三种方法,均存在计算量较大,实时跟踪效果较差等问题。孙同同等[7]通过空间激光通信对目标进行检测与跟踪,能够精确地检测出实时运动的物体并进行瞬时跟踪;高森等[8]基于距离加权的机器人运动目标跟踪,能够满足跟踪任务要求。但上述两种方法均不能对多目标进行良好的跟踪,等等。
鉴于此,本文采用图像技术与新型粒子滤波融合算法,在标准粒子滤波基础对重采样过程进行区域约束,使得粒子在重采样过程中不再丧失粒子各向异性。引进高斯核函数,将每帧图像用颜色直方图进行相似度比较,得出观测修正信息,使新型粒子滤波在跟踪目标过程中更可靠,更有效率。
1 机器人图像理论分析
机器人目标跟踪的状态矢量是由运动学参数和椭圆特征参数组成,我们采用的状态矢量为:

(1)

机器人样本是通过运动状态模型方程逐步更新粒子,更新方程为:

(2)

分析机器人的运动特性,是用图像处理的方法对视频进行分帧处理,再通过图像分割技术采用图象颜色直方图,从图像中机器人运动领域提取特征数据,可以用颜色直方图来描述。
图像颜色分布采用高斯核函数[9-10]来表述。

(3)
(4)

(5)

(6)

机器人目标跟踪中,采用高斯密度函数作为颜色直方图的候选目标和参考目标分布的似然函数:

(7)
σ为颜色高斯方差。甄别度越小,实际采样目标越准确,目标观测概率数值越大。
2 粒子滤波改进算法
粒子滤波是基于一种MonteCarlo的近似贝叶斯滤波算法,采用数理统计思想即用一些离散型随机粒子来近似系统分布的概率密度函数,常用在非线性和非高斯的系统环境中,对机器人的鲁棒性实时跟踪具有很高的效率与可靠性。粒子滤波算法原理框图如图1所示。

图1 粒子滤波改进算法原理框图
2.1 粒子滤波方法
(1)初始化

(2)预测

(3)更新
①计算每个样本的颜色直方图,采用方程(4);
②计算每个样本的Bhattacharrya系数用方程(5);

(8)
根据粒子权重值,可以估计出粒子的状态:
(9)
(4)重采样
(10)
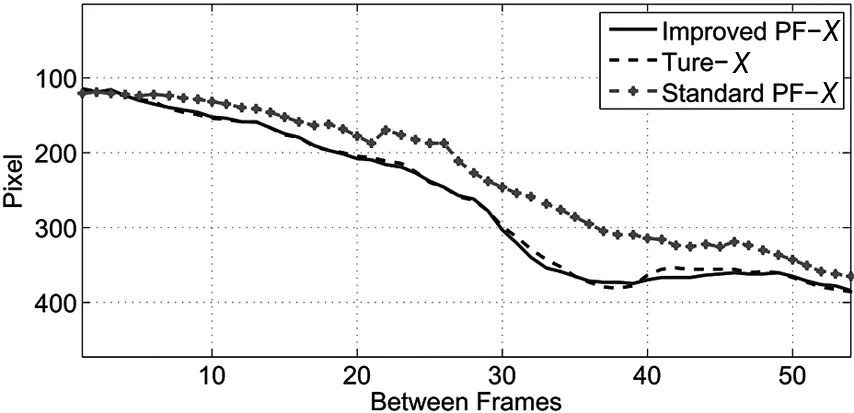
Neff (11) 如果公式(11)成立,粒子需要进行重采样,过程如下: (12) 重采样过程中Neff为有效粒子数量,用它来估计衰减粒子数量,当Neff低于设置的阀值Ndegeneracy时,就会进行重采样来弥补衰减粒子数量,在机器人跟踪实验中设置Ndegeneracy为120。 重采样过程可以减少有效粒子衰减现象,但是带来的却是丧失粒子各向异性,可能导致跟踪精度降低,甚至跟踪目标失败。因此提出了一种新的重采样方法来解决这个问题。 2.2 粒子滤波新型重采样方法 根据贝叶斯理论,先验分布参数被作为统一的分布,但是它没有跟踪过程中的观测信息,可能导致跟踪不准确。机器人跟踪实验中,我们采用的是在临近区域内的新粒子被假设作为统一的分布即采样粒子区间给予约束区域。 (13) (14) 机器人目标跟踪实验所用图像是实时跟踪视频。跟踪方法包括新型重采样粒子滤波和标准粒子滤波。在机器人目标跟踪中进行了两组实验,第一组是机器人单目标的跟踪,第二组是双目标跟踪,如图2所示。 图2 机器人跟踪实验设备及原理框图 实验中的Ture表示的是机器人通过自身的定位传感器得到的数据(认为是机器人移动的真实值),ImprovedPF为改进算法后测得的数据,StandardPF表示为标准粒子滤波算法跟踪得到的数据(文章篇幅有限,只对单个机器人跟踪实验进行了分析)。 图3~图8是在实验用200个粒子条件下单个机器人跟踪实验的数值化分析。图3是粒子滤波算法下机器人Y方向的位移,由图分析得出标准粒子滤波算法和改进后的粒子滤波算法在0~26帧范围内误差分别为0~3.1%和0~0.5%;在27~55帧范围内标准粒子滤波算法完全丢失跟踪目标(机器人),(在27帧时机器人Y方向的位移突然发生极度偏转)而改进粒子滤波算法误差为0~7.5%左右。实验证明改进后的粒子滤波具有较高的跟踪精度。 图4是粒子滤波算法下机器人X方向的位移,分析得出:SPF(标准粒子滤波算法)和IPF(改进粒子滤波算法)机器人在0~5帧范围都能被两种算法稳定的跟踪;在6~55帧范围,SPF跟踪误差为2.2%~32.1%,IPF跟踪误差为0~0.35%左右。由数据分析可以得出IPF的稳定性及跟踪精度远高于SPF。 图5是粒子滤波的机器人目标跟踪两帧之间距离图,在0~28帧范围内SPF和IPF方法误差基本保持在0~1.4%左右;在29~34帧范围内SPF的误差基本接近于100%,IPF的误差为0~0.44%左右;在35~42帧范围内SPF的误差略小于IPF的误差;在43~55帧范围IPF误差明显小于SPF。由以上分析得出机器人目标跟踪两帧之间距离的IPF误差基本稳定在0~1.4%左右,精度高于SPF。 同理,图6、图7可以得出IPF算法明显优于SPF算法,在跟踪机器人时能保持较高的稳定性(在突变时,相应灵敏度较高)。 图8是新型重采样约束下的重采样粒子分布直方图,能明显看出采样粒子的分布较均匀,没有丧失各向异性,对能准确跟踪机器人目标起到决定性作用。这些结果充分表明标准粒子滤波算法在复杂干扰性中无法跟踪视频中的机器人目标,新型粒子滤波算法能够准确甄别单、多目标,具有高的可靠性。 图3 粒子滤波的机器人Y方向位移 图4 粒子滤波的机器人跟踪X方向位移 图5 粒子滤波的机器人目标跟踪两帧之间距离 图6 粒子滤波的机器人跟踪两帧之间角度 图7 粒子滤波的机器人跟踪两帧之间速度 图8 新型粒子滤波重采样的粒子分配数量直方图 多方法融合的新型粒子滤波方法,在高斯核函数基础上对各帧图像的相似度进行对比,使得机器人的跟踪目标及时获得修正,同时为了保证粒子跟踪目标的准确性,在重采样过程中对需要采样粒子进行区域约束,确保粒子不会丧失各向异性。实验结果表明,多方法融合的新型粒子滤波算法对于机器人多目标跟踪相比标准粒子滤波算法具有高精度和高可靠性。 [1] 侯志强,韩崇昭.视觉跟踪技术综述[J].自动化学报,2006, 32(4):603-617. [2] 黎万义, 王鹏, 乔红.引入视觉注意机制的目标跟踪方法 综述[J].自动化学报,2014, 40(4):561-576. [3] 李明锁,井亮. 结合扩展卡尔曼滤波的CamShift移动目 标跟踪算法[J]. 电光与控制,2011, 18(4):1-5. [4]Ke-jiaBAI,Wei-MingLIU.ImprovedObjectTrackingwithParticleFilterandMeanShift[J].IEEEInternationalConferenceonAutomationandLogistics. 2007,18(21): 431-435. [5]MSanjeevArulampalam,SimonMaskell.ATutorialonParticleFiltersforOnlineNonlinear/NoN-GaussionBayesianTracking[J].IEEETransactionsonSignalImaging,2002, 50(2):174-188. [6]BingJU,Zeng-huiZHANG.ANovelProposalDistributionforParticleFiller[J].IEEEInternalCongressonImageandSignalprocessing,2010(3):3120-3124. [7] 孙同同,孙首群. 基于视觉检测与跟踪技术在机器人中 的应用[J]. 组合机床与自动化加工技术,2016(2):79-81. [8] 高森, 丛明,刘冬,等. 一种基于距离加权的机器人运动目标跟 踪方法[J]. 组合机床与自动化加工技术,2014 (12):65-69. [9] 崔丽珍,李蕾.基于核函数法及粒子滤波的煤矿井下定位算法研究[J].计算机工程与科学,2013,26(12):1729-1733. [10] 袁广林,薛模根,谢恺,等.基于核函数粒子滤波和多特征自适应融合的目标跟踪[J].计算机辅助设计与图形学学报, 2009,21(12):1774-1784. (编辑 李秀敏) Robots Automatic Tracking Based on the New Algorithm Integrating Graphic Technology and Particle Filter JIANGDao-wei,YUANLiang,JUGang (CollegeofMechanicalEngineering,XinjiangUniversity,Urumqi830047,China) Therobottargettrackingtechnologyisanimportantpartofrobotnavigationandpositioningtechnology.Inordertoaccuratelytracktherobot'spositionandspeedinformation.Thispaperproposesafusionmethodofparticlefilteralgorithm.Thealgorithmusetheimagecolorhistogram,combinedwiththefeatureofGaussiankernelfunctionminingdata,italsofusionparticlefilteralgorithmtoautomatictargettrackingrobot.Inaddition,forthesampleimpoverishment,namely,thesituationthatthemajorityofparticlesoverlapononesinglepointinthecomputationofparticlefilter,resamplingisutilitied,butanisotropiesofsomeparticlesarepronetoloseduringthisprocess,whichmayleadstolowtracingprecision,orevenfailureoftrace,soanewbindingmethodofresampling,onthebasisofstandardfilter,isputforward.Theexperimentalresultsshowthattheimprovedparticlefilteralgorithmbasedoncolordistributioncaneffectivelyreducethesampledifferentiationproblem,andcanbehighprecisionidentifyrobotmove,turnandmeetgoals. robotnavigation;targetrecognition;imagetechnology;kernelfunction;resamplingconstraintmethod;thecolorhistogram 1001-2265(2016)12-0031-04DOI:10.13462/j.cnki.mmtamt.2016.12.009 2016-03-11; 2016-03-18 国家自然基金(61262059,31460248);新疆研究生科研创新项目(XJGRI2014026) 姜道伟(1989—),男,山东泰安人,新疆大学硕士研究生,研究方向为机器人导航,(E-mail)602184752@qq.com。 TH166;TG A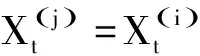



3 实验结果分析





4 结论