基于Isight的增程式电动汽车控制参数多目标优化
2016-01-27尹安东董欣阳张冰战
尹安东, 董欣阳, 张冰战, 江 昊
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
基于Isight的增程式电动汽车控制参数多目标优化
尹安东,董欣阳,张冰战,江昊
(合肥工业大学 机械与汽车工程学院,安徽 合肥230009)
摘要:文章以某款增程式电动汽车(range-extended electric vehicle, REEV)为研究对象,设计了整车控制策略,借助整车性能仿真软件CRUISE和多学科设计优化软件Isight搭建了整车性能仿真和优化模型,并采用改进的非支配排序遗传算法(non-dominated sorting genetic algorithm,NSGA-Ⅱ)对增程器控制参数进行多目标优化。优化结果表明,在满足整车能量需求的前提下,优化后的增程器总发电量减少了7.34%,汽车百公里燃油消耗量降低了8.28%。
关键词:增程式电动汽车;Isight软件;控制参数;多目标优化;非支配排序遗传算法
0引言
由于当前动力电池的比能量和功率密度比较低[1],纯电动汽车在续驶里程方面尚不足以和传统汽车相抗衡。为了延长纯电动汽车的续驶里程,一种装配增程器的增程式电动汽车(range-extended electric vehicle, REEV)[2]受到了广泛关注。
目前,对增程式电动汽车的研究主要集中在动力系统参数匹配和控制策略等方面[3-8]。基于规则的定点控制策略简单明了、便于实际工程应用,但是增程器的输出功率不能根据需求进行调整,而包括模糊控制、神经网络控制在内的智能控制方法在这方面的控制效果比较理想,且燃油经济性也比基于规则的定点控制好,但由于其过于复杂而难以在工程中应用。
为了继承基于规则的定点控制策略的工程易用性,同时使增程器的输出功率可调,本文设计了增程器三工作点控制策略,采用改进的非支配排序遗传算法(non-dominated sorting genetic algorithm,NSGA-Ⅱ),在Isight和CRUISE联合仿真平台上对控制参数进行优化,以获得更少的总发电量和更低的油耗,最大限度地减少增程器的使用。结果表明,该控制策略不仅实现了调整增程器输出功率的功能,并且其总发电量和燃油经济性均优于基于规则的定点控制策略。
1REEV的总体设计
1.1 REEV的动力系统结构
某款增程式电动轿车的技术要求性能指标如下:最高车速≥150 km/h;最大爬坡度≥30%;0~100 km/h加速时间≤12 s;纯电动续驶里程≥100 km;总续驶里程≥400 km。设计的REEV动力系统主要由动力电池、增程器(由发动机和发电机构成)和驱动电机等部件组成,如图1所示。其中粗线表示机械连接,细线表示电气连接。
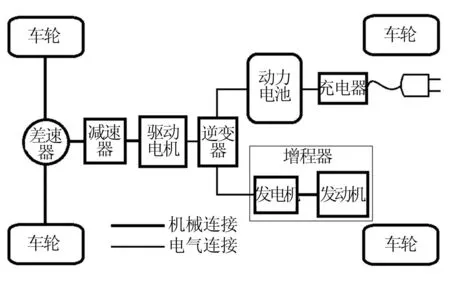
图1 增程式电动汽车的结构
1.2 REEV主要参数的确定
根据电动汽车设计理论和整车性能指标要求,对REEV的动力系统参数进行匹配计算[5,9],所设计的REEV整车和主要部件参数如下:整车整备质量为1 200 kg;轮胎滚动半径为0.287 m;滚动阻力系数为0.015;发动机额定功率为50 kW;发电机峰值功率为44 kW;驱动电机峰值功率为75 kW;主减器速比为6.058。
1.3 REEV的工作机理
当作为主动力源的动力电池电量充足时,驱动电机所需能量全部由动力电池提供,此时增程式电动汽车工作处于纯电动模式,其工作状态与纯电动汽车相同,从而实现零油耗和零排放;当动力电池电量不足时,增程器开启,为驱动电机提供所需电力,若有多余电力剩余,还可同时为动力电池充电,从而达到延长续驶里程的目的。此外,在汽车不使用时,还可用220 V市电对动力电池充电,以进一步减少增程器的使用。与纯电动汽车相比,增程式电动汽车的续驶里程得以大幅度提高,同时,其发动机可以始终处于最佳工作状态,燃油经济性及排放性均优于传统汽车。
2增程器三工作点控制策略设计
由于增程式电动汽车的动力系统配备了大功率动力电池,并且发动机与传动系不存在机械耦合,所以可以将发动机的工作点控制在其万有特性曲线上的高效率区域内,从而获得最佳的燃油经济性和排放性[10-11]。
增程式电动汽车在一般工况下采用纯电动模式,而增程模式仅在电池电量不足时才启用,并期望在该模式下尽量减少增程器多余的发电量,以减少不必要的燃油消耗。
为了尽量减少增程器的使用,并在最大程度上跟随整车需求功率的变化,设计了发动机三工作点控制策略,而增程器的启停则根据设定的SOC上下限值进行控制。
2.1 发动机工作点的设计
由于所选用的发动机高效率区的长轴在万有特性图上接近于水平方向(转速轴方向),为了使发动机的工作点尽可能处于最高效率区,发动机工作点的控制采用定转矩控制方法,因此只需调节发动机转速即可改变发动机输出功率[9]。
3个发动机工作点是在高效率区,根据其输出功率的大小进行选择的,所选择的工作点根据输出功率的大小从小到大分别记为Z1、Z2、Z3。
初步选定的发动机3个工作点Z1、Z2、Z3示意图如图2所示。图2中,Z1、Z2、Z3点对应的转速分别为2 000、2 800、3 500 r/min。
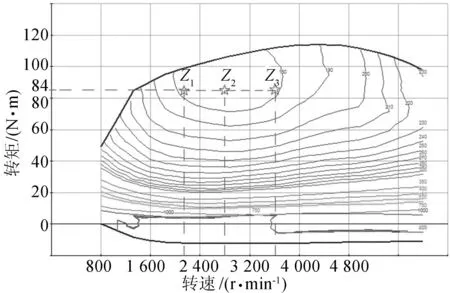
图2 发动机3个工作点示意图
因增程器输出功率设计主要考虑的因素是增程模式下汽车能长时间连续行驶的车速[6],并未考虑汽车在急加速和爬陡坡情况下的功率需求,并且通常情况下汽车急加速或爬陡坡的时间并不会很长,由此导致的高功率需求完全可以暂时由动力电池提供,因而发动机Z3点选取不考虑短时急加速和爬陡坡等因素的影响。而Z1点和Z2点的选取主要考虑汽车在市区低速行驶和市郊较高车速行驶的功率需求。
2.2 工作点切换规则
发动机工作点切换的依据是驱动电机的功率需求,通过比较驱动电机当前的需求功率值与工作点切换上、下限值大小,在发动机的3个工作点间进行切换。
考虑到发动机工作状态的改变具有一定的惯性,为了避免因需求功率的剧烈变化导致发动机在短时间内频繁切换工作点,本文在相邻2个工作点的切换限值之间设定了一个差值,以使发动机更高效、更稳定地工作,并在一定程度上简化整车控制策略。具体的工作点切换规则见表1所列。
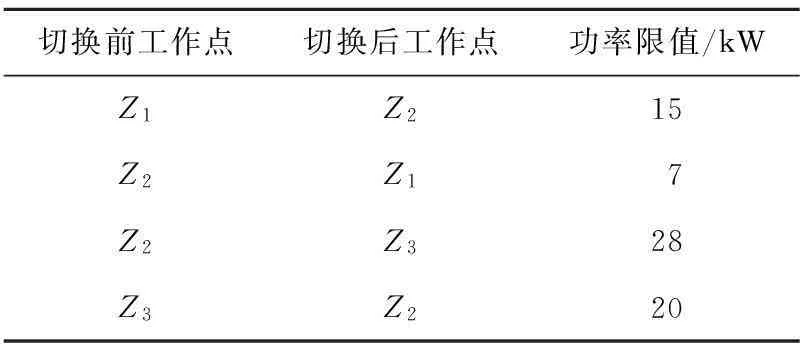
表1 工作点切换规则
2.3 控制系统模型的建立
根据所设计的增程器工作点及其切换规则,设计REEV整车控制策略如下:
(1) 纯电动模式控制。当电池电量充足时,由动力电池提供汽车行驶所需能量,增程器处于关闭状态。
(2) 增程模式控制。当动力电池SOC下降到一定程度时,开启增程器为汽车提供所需能量,而多余部分则充入动力电池。此时发动机工作于最高效率区内,并根据驱动电机所需功率大小,根据设定的门限值在Z1、Z2、Z33个工作点间进行切换。
(3) 再生制动模式控制。在制动时,判断是否满足再生制动条件,并合理分配驱动电机的反拖制动力和摩擦制动力,从而回收部分制动能量。
其中,增程器的控制流程如图3所示。
基于Matlab/Simulink建立整车控制系统模型。其中,增程器控制模块的输入参数为当前动力电池的荷电状态SOC,增程器开启门限值SOC-low,增程器关闭门限值SOC-high,驱动电机需求功率值pow-re,发动机3个工作点的转速值eng-spd-low、eng-spd-mid、eng-spd-high;输出参数(控制变量)为增程器开关信号start-switch-signal、发动机期望转速值desired-eng-spd、发电机负载值gen-load-signal。通过该模块的控制,可以达到通过调节发动机转速来改变增程器输出功率的目的。

图3 增程器控制流程
3控制参数多目标优化
3.1 优化目标
虽然增程式电动汽车通常工作于纯电动模式下,但是由于其纯电动续驶里程较短,在行驶里程较长的情况下将不可避免地启动增程器,此时增程器提供的能量应当在满足行驶需求的前提下越少越好,从而减少不必要的燃油消耗和污染物排放。
本文针对所研究的增程式电动汽车,结合用于仿真的Isight/CRUISE平台,选定2个优化目标,分别是百公里燃油消耗量(函数表达式为f1(x))和驱动电机、发电机的净发电量(函数表达式为f2(x))。优化目标是使目标函数f(x)=μ1f1(x)+μ2f2(x)达到最小,其中2个子目标函数分别为:


(1)
其中,μ1、μ2分别为子目标函数f1(x) 、f2(x)的权重系数;b为燃油消耗率;ρ为燃油密度;s为行驶距离;PE为发动机输出功率;PG为发电机发出的电功率;PD为驱动电机消耗的电功率;xi为待优化参数。
考虑到增程器产生的电能是由汽油燃烧转化而来的,故目标函数f(x)中的权重系数μ1、μ2应根据油电转换比例而定,根据参考文献[12]中的换算关系,可计算得到μ1=1,μ2=0.391。
3.2 优化参数及其约束条件
3.2.1发动机工作点优化参数
本文初选的发动机工作点仅从整车功率需求角度考虑,并不能保证在设定的工作点切换规则下发动机燃油经济性最优、总发电量最少,因而需要对所选定的3个工作点进行优化,由于发动机采用恒转矩控制方式,故待优化参数为各工作点的转速。
发动机3个工作点对应的待优化参数x1、x2、x3上下限值的选定主要依据如下3个规则:
(1) 3个工作点转速变化范围均应在发动机最高效率区内,以保证发动机具有最佳的燃油经济性。
(2) 保证相邻2个工作点的输出功率有一定的差值,避免相邻2个工作点过于接近导致的频繁切换工作点。
(3) 3个工作点各自上下限值决定的输出功率应与工作点切换规则相匹配。
根据以上3个规则确定的待优化参数x1、x2、x3的上下限值见表2所列。
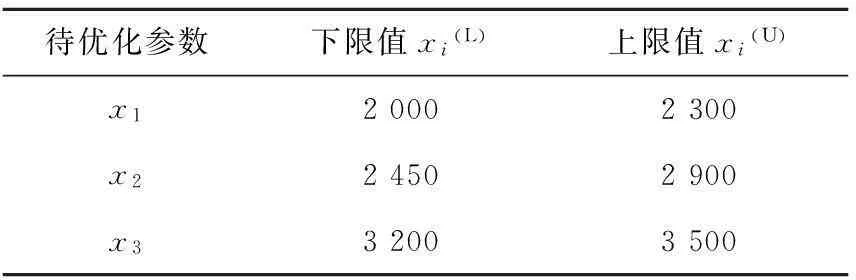
表2 待优化参数的工作点边界条件 r/min
3.2.2SOC优化参数
由于控制增程器开关的SOC上下限值对增程器的工作时间和行驶结束后剩余能量均有影响[13],并且SOC充放电区间对动力电池的充放电效率也有影响[14],因此也需对决定增程器启停的SOC上下限值进行优化。
为了保证整车纯电动续驶里程达到给定技术要求,本文不对增程器开启点的SOC值0.25进行优化,仅对增程器关闭点的SOC值x4进行优化。
本文考虑了一次充电汽车能行驶的里程、动力电池内阻随SOC变化导致的充放电能量损失、充放电深度对动力电池寿命的影响。最终确定增程器关闭点SOC值x4的上下限值分别为:x4(L)=0.40,x4(U)=0.55。
3.3 约束条件
在进行优化计算前,为了得到符合工程实际要求的可行解,根据发动机3个工作点的选定,确定如下2个约束条件:
g1(x)=x2-x3+380≤0,
g2(x)=x1-x2+450≤0
(2)
这2个约束条件限制了发动机3个工作点Z1、Z2、Z3之间的转速差,从而保证相邻2个工作点输出功率的差值符合工程实际要求,避免因差值过小导致的频繁切换工作点。
3.4 非支配排序遗传算法
非支配排序遗传算法(NSGA)是最高效的进化算法之一。它采用优胜劣汰选择、模拟二进制交叉、多项式变异这3种运算作用于种群,在每次迭代过程中创造出更优的种群,这种连续的迭代方法已经被证明可以收敛接近最优解[15],并且收敛速度比其他算法更快,故本文选择NSGA-Ⅱ算法。该算法的计算流程[16]如图4所示。
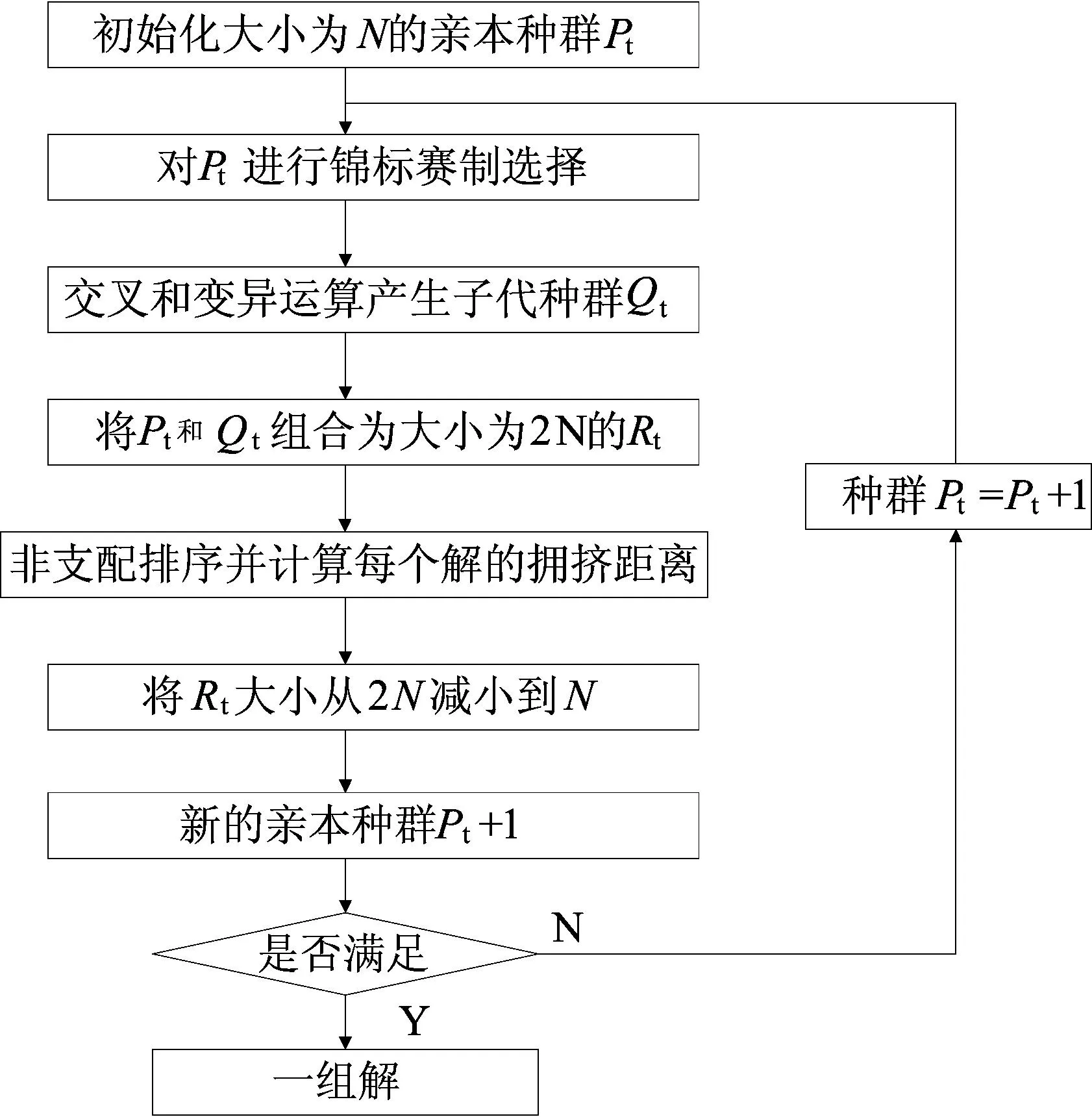
图4 NSGA-Ⅱ算法的计算流程
3.5 仿真优化模型
3.5.1仿真优化模型
本文采用CRUISE软件对整车性能进行仿真计算,为了便于Isight集成,仿真模型采用参数化建模的方法,待优化参数通过CRUISE软件中的Constants模块输入,可以得到整车模型如图5所示。
本文采用Isight软件中的Simcode模块集成CRUISE软件对相关参数进行优化设计。
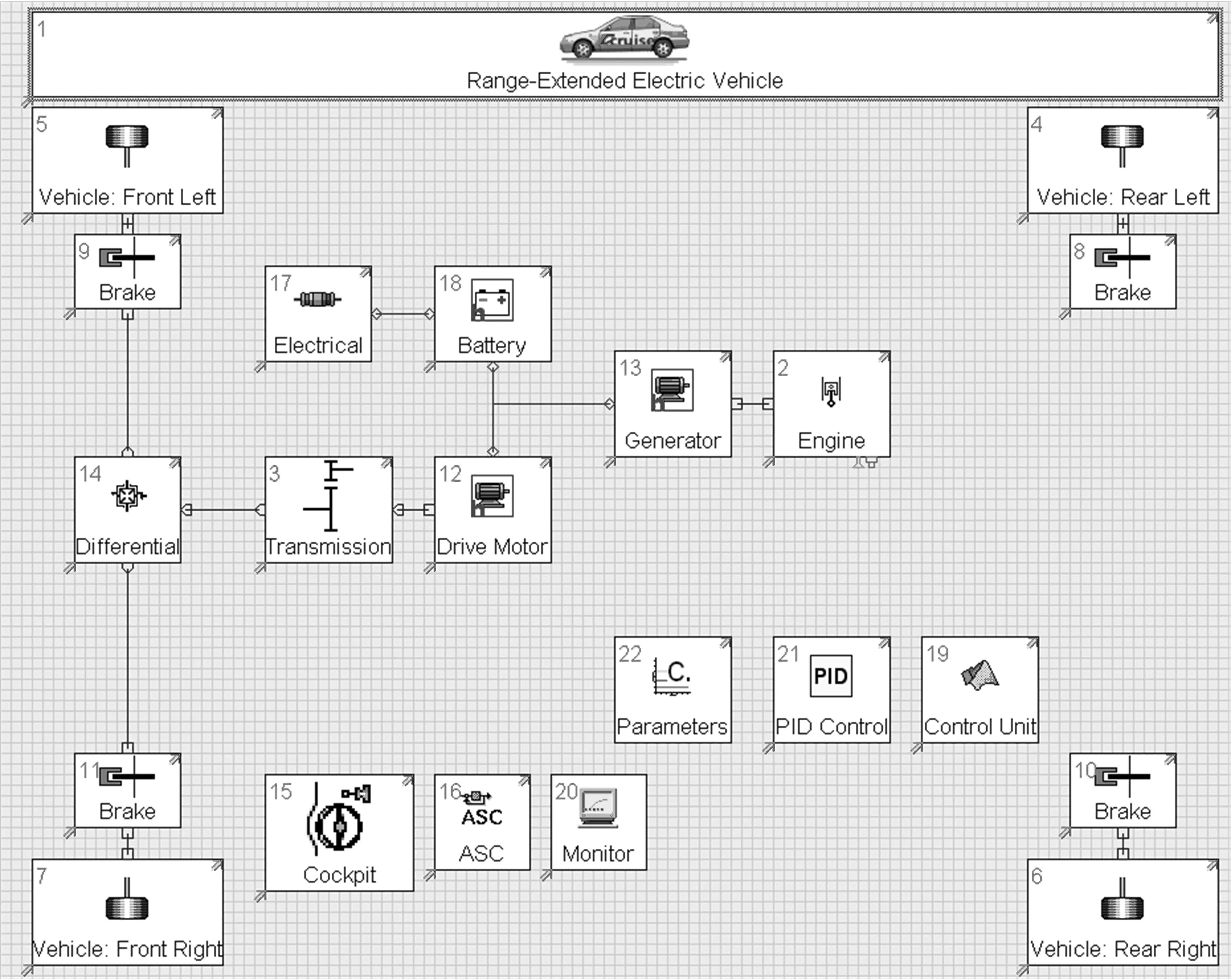
图5 CRUISE仿真模型
3.5.2Isight/CRUISE集成优化过程
Isight集成CRUISE的步骤如下:
(1) 编写*.bat批处理文件,在该文件中定义Isight调用的CRUISE软件可执行程序路径及CRUISE模型中的*.prj文件路径。
(2) 将CRUISE模型的*.dbf文件设置为Isight软件的输入文件,并从中定义待优化参数。
(3) 将CRUISE模型的结果文件cruise.log作为Isight软件的输出文件,并从中定义优化目标。
(4) 将编写的*.bat文件设置为Simcode模块命令。
(5) 将CRUISE模型所在文件夹设置为优化程序的执行路径。
(6) 运行优化程序,得到优化结果。
4优化结果分析
4.1 Pareto最优解集
本文采用20个连续的新欧洲行驶工况(new Europeun driving cycle,NEDC)模拟增程模式对待优化参数进行优化。由于多目标优化问题中各个目标间是相互冲突的,所以优化得到的解不可能是单一解,而是一个Pareto最优解集[17],本文给出得到的部分Pareto最优解集,见表3所列。
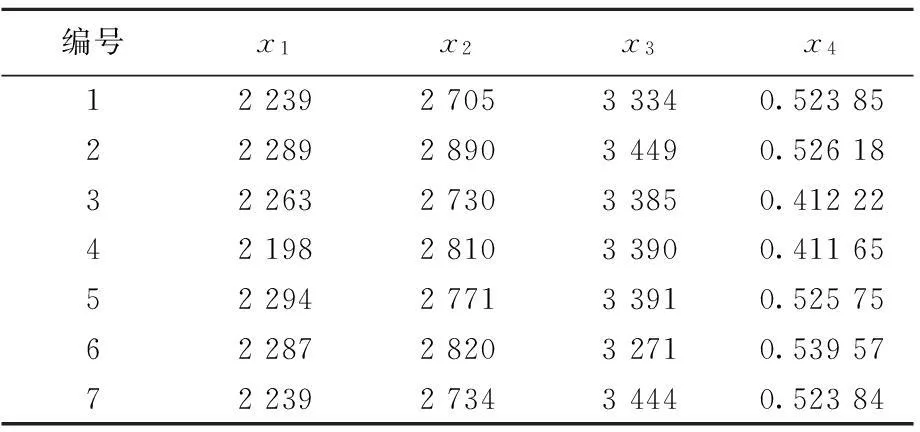
表3 部分Pareto最优解集
为了获得在发电效率相同的情况下净发电量尽可能小的最优解,根据计算结果,选取表3中的第5组解作为最优折衷解,并对该优化结果进行分析。
4.2 优化结果分析
根据选择的最优折衷解,利用CRUISE整车性能仿真模型,采用20个连续NEDC工况进行仿真分析,得到优化前后汽车的主要技术指标,见表4所列。
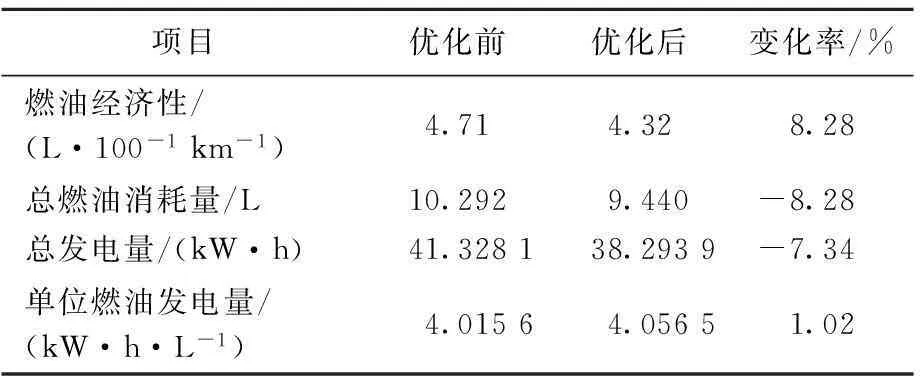
表4 优化前后仿真结果对比
从表4可以看出,优化后的增程器总发电量减少了7.34%,同时其百公里燃油耗量降低了8.28%,从而使增程器的单位燃油发电量小幅度提升1.02%,表明优化后的增程器整体发电效率得到了提高。
4.3 与基于规则的定点控制策略对比分析
由于设计的增程器三工作点控制策略是由基于规则的定点控制策略改进而来的,因而需要对两者进行对比分析,以验证增程器三工作点控制策略是否具有一定的优越性,对比结果见表5所列。
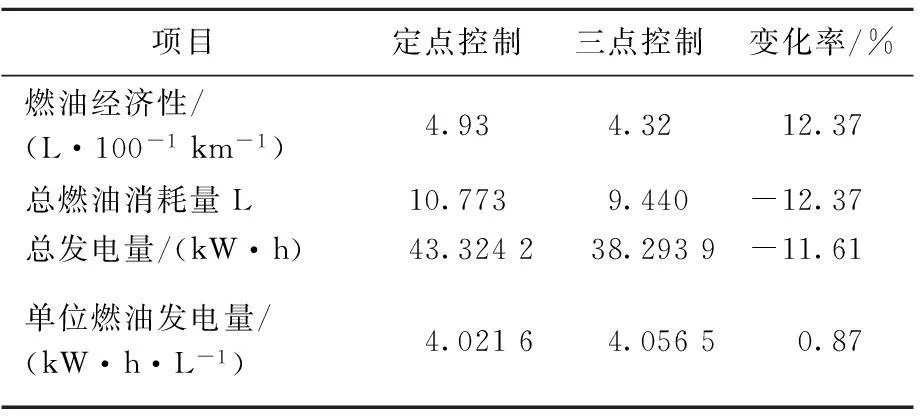
表5 与定点控制对比分析结果
从表5可以看出,与基于规则的定点控制策略相比,增程器总发电量减少11.61%,百公里燃油消耗量降低12.37%,从而使增程器整体发电效率略微提升0.87%。这说明改进后的控制策略在总发电量控制和燃油经济性方面比原策略更优。
5结论
本文利用CRUISE软件搭建了整车经济性仿真模型,并采用Isight集成CRUISE的方法对设计的控制策略参数进行了优化,得到如下结论:
(1) 设计的发动机三工作点控制策略能够控制发动机在最佳效率区内根据整车功率需求调整增程器的输出功率,克服了基于规则的定点控制策略不能调整增程器输出功率的缺点。
(2) 采用20个连续NEDC工况模拟增程模式对增程器控制系统参数进行优化,优化后的增程器总发电量减少了7.34%,燃油经济性提高了8.28%,增程器整体的发电效率提高了1.02%,表明采用的多目标优化方法是有效的。
(3) 与基于规则的定点控制策略相比,增程器三工作点控制策略在总发电量控制和燃油经济性方面得到明显改善。
[参考文献]
[1]艾新平,杨汉西.电动汽车与动力电池[J].电化学,2011,17(2):123-133.
[2]Tate E D,Harpster M O,Savagian P J.The electrification of the automobile: from conventional hybrid,to plug-in hybrids,to extended-range electric vehicles[C]//SAE Paper,2008.doi:10.4271/2008-01-0458.
[3]Xu Liangfei,Yang Fuyuan,Hu Mingyin,et al.Comparison of energy management strategies for a range extended electric city bus[J].中国科学技术大学学报,2012,42(8):640-647.
[4]窦国伟,马涛峰,马先萌.基于模糊控制算法的增程式电动车能量分配策略[J].上海汽车,2012(3):10-14.
[5]周苏,牛继高,陈凤祥,等.增程式电动汽车动力系统设计与仿真研究[J].汽车工程,2011,33(11):924-929.
[6]尤寅,宋珂,尹晓东.带Range-Extender纯电动汽车动力系统设计[J].北京汽车,2010(3):41-46.
[7]Wu Xiaogang,Lu Languang.Simulation research of energy management strategy for range extended electric bus[C]//2012 IEEE Vehicle Power and Propulsion Conference,2012:354-357.
[8]宋珂,章桐.增程式纯电驱动汽车动力系统研究[J].汽车技术,2011(7):14-19.
[9]陈长红.增程式电动汽车控制策略的研究[D].锦州:辽宁工业大学,2013.
[10]朱莉莉.增程式电动汽车辅助动力单元控制系统的研究[D].哈尔滨:哈尔滨理工大学,2012.
[11]叶冬金.增程式纯电动车动力系统参数匹配及控制策略研究[D].长春:吉林大学,2012.
[12]李春林.混合动力叉车能耗模型与仿真研究[D].合肥:合肥工业大学,2013.
[13]牛继高,周苏.增程式电动汽车增程器开/关机时刻的优化[J].汽车工程,2013,35(5):418-423.
[14]赵文章.增程式客车整车控制器与控制策略研究[D].哈尔滨:哈尔滨理工大学,2011.
[15]赖宇阳.Isight参数优化理论与实例详解[M].北京:北京航空航天大学出版社,2012:193-194.
[16]张希,米春亭.车辆能量管理:建模、控制与优化[M].北京:机械工业出版社,2013:236-238.
[17]尹安东,杨峰,江昊.基于iSIGHT的纯电动汽车动力系统匹配优化[J].合肥工业大学学报:自然科学版,2013,36(1):1-4.
(责任编辑闫杏丽)
Multi-objective optimization of control parameters of range-extended electric vehicle based on Isight
YIN An-dong, DONG Xin-yang, ZHANG Bing-zhan, JIANG Hao
(School of Machinery and Automobile Engineering, Hefei University of Technology, Hefei 230009, China)
Abstract:A range-extended electric vehicle(REEV) was studied, and a control strategy was designed. The simulation model was established by using the vehicle simulation software CRUISE and the multi-objective optimization software Isight, and the control parameters were optimized with an improved non-dominated sorting genetic algorithm(NSGA-Ⅱ). The result showed that the power generated by the range-extender could meet the need of vehicle. And the range-extender could reduce the total electric power by 7.34% as well as the fuel consumption per 100 kilometers by 8.28%.
Key words:range-extended electric vehicle(REEV); Isight software; control parameter; multi-objective optimization; non-dominated sorting genetic algorithm(NSGA)
中图分类号:U469.72
文献标识码:A
文章编号:1003-5060(2015)03-0289-06
doi:10.3969/j.issn.1003-5060.2015.03.001
作者简介:尹安东(1963-),男,安徽桐城人,博士,合肥工业大学副教授,硕士生导师.
基金项目:国家“863”节能与新能源汽车重大资助项目(2012AA111401);安徽省自然科学基金资助项目(1208085ME78)
收稿日期:2014-03-12;修回日期:2014-05-28