低功耗蓝牙手机终端室内定位方法
2016-01-26胡引翠卢光耀李晓进刘长宏
苏 松,胡引翠,卢光耀,董 硕,李晓进,刘长宏
(1. 河北师范大学资源与环境科学学院,河北省 石家庄 050016; 2. 河北师范大学旅游
学院,河北 石家庄 050016)
Indoor Localization Method with the Low Power-consuming
Bluetooth Mobile Phone Terminals
SU Song,HU Yincui,LU Guangyao,DONG Shuo,LI Xiaojin,LIU Changhong
低功耗蓝牙手机终端室内定位方法
苏松1,胡引翠1,卢光耀1,董硕2,李晓进1,刘长宏1
(1. 河北师范大学资源与环境科学学院,河北省 石家庄 050016; 2. 河北师范大学旅游
学院,河北 石家庄 050016)
Indoor Localization Method with the Low Power-consuming
Bluetooth Mobile Phone Terminals
SU Song,HU Yincui,LU Guangyao,DONG Shuo,LI Xiaojin,LIU Changhong
摘要:为满足高精度室内定位的需求,提出了基于地图匹配技术和指纹技术的高精度室内蓝牙定位方法。该方法以低功耗蓝牙手机终端为指纹采集和定位媒介,通过获取蓝牙信号强度参数,并与室内地图进行匹配处理,建立蓝牙信号指纹库。在定位阶段,通过手机终端获取附近蓝牙信号强度信息,与指纹进行对比。在位置计算过程中,采用地图匹配技术,通过空间叠加分析过滤后确定手机终端的空间位置。本文选取了一典型商业环境,通过测试,当蓝牙锚点部署密度间隔15 m时,平均定位精度在3 m以内。
关键词:室内定位;蓝牙;iBeacons;指纹数据;地图匹配
一、引言
随着无线网络和移动通信技术的飞速发展,现代人们生活对定位的需求越发明显。当前社会的定位越发趋向于对室内定位的需求,相对于室外定位发展成熟,室内定位无疑还在起步阶段。人类生活休闲的场所越来趋向于大规模的大型休闲娱乐购物中心;随着私家车数量的不断增长,露天停车场的车位供给量明显不够,大型的地下停车场已经开始流行;伴随人口的增长,综合性的大型医疗中心也日益增多。在这些大规模的室内环境迅猛发展的情况下,室内定位更加突显其重要性。通过室内定位,一方面可以获知或赋予特定主体位置信息;另一方面可以监控或实时跟踪特定主体的位置信息[1]。当灾难来临时,室内定位同样会发挥举足轻重的作用,如火灾发生的情况下,室内定位可以为消防人员提供火势下复杂的室内空间格局,避免不必要的人员伤亡。室内定位的应用涉及众多领域,这都催生着室内定位发展的快速前进。
二、室内定位发展现状
当前常用的室内定位技术主要有超声波技术、红外线技术、超宽带(UWB)、射频识别(RFID)、ZigBee、Wlan、光跟踪定位、移动通信定位、蓝牙定位、地磁定位。
超声波定位精度可以达到厘米级,但是超声波衰减明显,影响定位有效范围。
红外定位精度可达到5~10 m。但红外线在传输过程中易受物体或墙体阻隔且传输距离较短,定位系统复杂度较高,有效性和实用性较其他技术仍有差距。
UWB定位,其准确度通常情况下不超过15 cm。但是其本身还不成熟,主要问题是UWB系统占用的带宽很高,可能会干扰现有其他无线通信系统。
RFID室内定位准确度为1~3 m。缺点是:标识的体积比较小,需要特定的识别设备,作用距离近,不具有通信能力,而且不便于整合到其他系统中。
Zigbee技术定位精度可达到米级。由于受室内复杂的环境影响,建立准确的传播模型非常困难,因此ZigBee定位技术的定位精度受较大的限制。
WLAN定位精度可达到5~10 m。WiFi定位系统具有架设成本较高、功耗较大等弱点,阻碍了室内定位技术的商业化进程。
光跟踪定位一般定位准确度为2~5 m。但由于其本身的特点,要实现高精度的光定位技术,必须配备光传感器,且对传感器方向性要求较高。
移动通信定位精度不高,其精度取决于移动基站的分布及覆盖范围的大小。
地磁定位的定位精度优于30 m。磁传感器是决定地磁导航定位的关键因素,精确的环境磁场基准图、可靠的磁信息匹配算法也是十分重要的。高精度地磁传感器过高的成本阻碍了地磁定位的普及发展。
蓝牙定位技术适用于测量短距离,功耗较低,主要应用于小范围定位,精确度为1~3 m,有中等的安全性和可靠性。蓝牙设备体积小,易于集成在PDA、PC及手机中,因此很容易推广普及。对于持有集成了蓝牙功能移动终端设备的客户,只要设备的蓝牙功能开启,蓝牙室内定位系统就能够对其进行位置判断。采用该技术作室内短距离定位时容易发现设备且信号传输不受视距的影响。
相比其他几种流行的室内定位方法,采用低功耗蓝牙4.0标准的室内定位方法具有成本低、部署方案简单、响应速度快等技术特点,加之手机设备厂商对蓝牙4.0标准规范的大力推广,因而具有更好的发展前景。
自蓝牙1.0标准规范颁布至今,涌现出了多种基于蓝牙技术进行室内定位的方法,包括基于范围检测的方法、基于信号传播模型的方法、基于场强指纹匹配的方法[2]等。基于范围检测的方法定位精度较低,定位精度在5~10 m;基于信号传播模型的方法定位精度在3 m左右;基于场强指纹匹配的方法定位精度在2~3 m。
iBeacons是基于蓝牙4.0中BLE(蓝牙低功耗)的特性发展而来的。随着蓝牙4.0版本中BLE技术的发布及苹果公司的大力推导,iBeacons应用已成为现在最热门的技术。现在,很多智能硬件也开始支持BLE的应用,特别是新上市的手机,BLE已成为标准配置。因此,利用BLE技术进行手机室内定位成为当今室内LBS应用的热点。在蓝牙定位方法中,以基于场强指纹匹配的方法精度最高,并得到广泛应用。
张浩等[3]改写了蓝牙固件程序,采用RSSI检测的方法,在服务端解算手机终端的位置,并通过网络将该位置反馈到手机终端。该方法依赖于定制化蓝牙固件和网络通信环境。
李娟娟[4]通过建立点对点链路连接采集室内环境指纹,定位区域内每隔1 m采集一个指纹库,定位阶段采用模糊数学的方法,通过模糊隶属度分析来解决指纹数据高维和不稳定性的问题。该定位方法定位参考点采集过于密集,现场实施采集效率低。
江德祥等提出了基于KRR的免标定定位算法[5],利用蓝牙锚点间的信号强度和坐标建立回归模型,实现自适应定位,试验测定平均误差为1.25 m[6]。这种定位方法必须事先输入蓝牙锚点的位置,不适宜对陌生环境的定位。
王睿等针对单一模型定位精度低的问题,提出了蓝牙和WiFi融合的定位方法,该方法通过最近邻和网格计算的方法进行决策融合实现定位[7]。这种定位方法要求必须同时部署WiFi和蓝牙环境。用于定位的手机必须同时开启蓝牙和WiFi。
基于场强指纹匹配方法的定位精度取决于两个方面:一是参考点场强指纹的差异化特征;二是定位解算时对指纹匹配度的判定。一方面,笔者通过采用夹角余弦的方法提取参考点的特征向量,并对其进行克里金空间插值,制作室内空间指纹格网;另一方面,在指纹匹配度判定过程中采用方法,并通过室内地图的空间约束来提高定位精度。
三、定位算法
1. 指纹数据采集处理方法
首先设立参考点,在参考点位置,以手机蓝牙获取蓝牙锚点的信号强度,建立初始样本数据库。
其次,对初始样本数据库进行处理。由于信号强度会受到室内复杂环境及采集设备自身信号的不稳定等因素影响,会产生RSSI值异常。在数据处理过程中,将这些异常值删除,以保证指纹数据库的准确性。
然后,利用夹角余弦的方法,提取参考点指纹特征。
最后,利用克里金插值方法,建立指纹格网[8]。
如图1所示,黑色点为指纹特征点,根据指纹特征点插值后得到指纹数据。
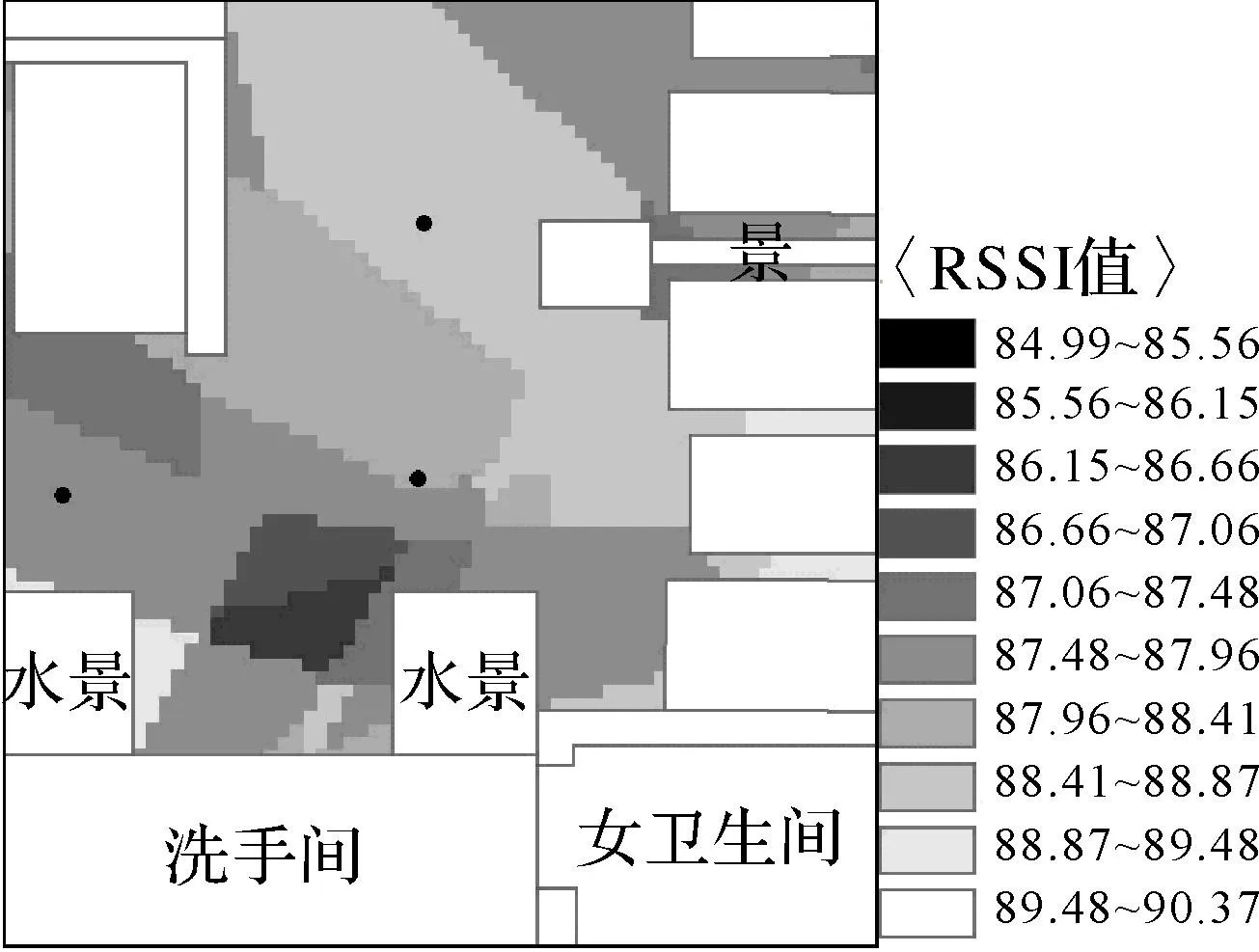
图1 克里金插值得到的指纹数据
2. 定位解算方法
采用K—近邻算法[9],将定位点RSSI值与指纹数据库作比对,根据设定的阈值计算得出数据库最相似指纹数据点,赋值给定位点完成定位。
在室内定位过程中,将指纹视作N维空间。具有蓝牙功能的手机终端设备扫描周围的所有蓝牙锚点时,会得到一个N维指纹数据点A,将点A与指纹数据库的参考指纹格网点进行N维空间距离计算,从中取最小的距离值,那么这个最小距离对应的参考指纹格网点的空间坐标即是点A的最近似位置C。将C与室内地图进行叠加分析,如果点C落入室内空间限制区域,将参考上次定位结果,将其移位到上次定位附近非限制区[10]。如图2所示,黑色点为定位点C实际坐标位置点,其位置落在限制区水景内,但实际上该区域是禁止入内区域,因此需要进行地图匹配,根据地图的限制性属性进行识别判断,按照设定好的距离阈值将C移位到水景以外的可达区域,图中的灰色点为地图匹配后的定位点C坐标。

图2 地图匹配后的定位效果
四、定位方法验证
1. 试验场地环境描述
本试验场地环境设在正常营业的商业网点,店内有空旷的大厅、玻璃幕墙、屏风隔断、单间和水景。在店内以15 m左右间隔安装iBeacon设备。
2. 指纹采集
首先开发无线指纹采集工具。无线指纹采集工具是一个基于手机终端的无线网络扫描和管理软件。
该软件可用于采集iBeacon数据指纹,能扫描接收到的iBeacon的UUID,记录相应信号强度,并按一定格式存储为初始指纹文件。
在采集初始指纹数据之前,需要制作室内区域的地图,在地图上指定参考点的位置,然后采集该位置点的指纹数据,以确保参考点位置的精确性。
采集结束后的指纹点会显示在地图上,如图3所示。地图上标注点即为采集得到的指纹点,每条路段的这些指纹点汇集成定位需要的指纹数据库。

图3 指纹点采集
3. 指纹数据的处理
采集数据过程中,受室内复杂环境与iBeacon自身信号的不稳定等因素的影响,会产生个别RSSI值异常,需要将这些异常值去除掉,以保证指纹数据库的准确性。本文采用了低通滤波方法对指纹数据进行预处理[11],将iBeacon的RSSI临界值设定为频率点,当频域超出这个截止频率时,则舍弃不用。
4. 指纹特征提取
表1为处理完成后Excel呈现出的指纹数据库样式表格。
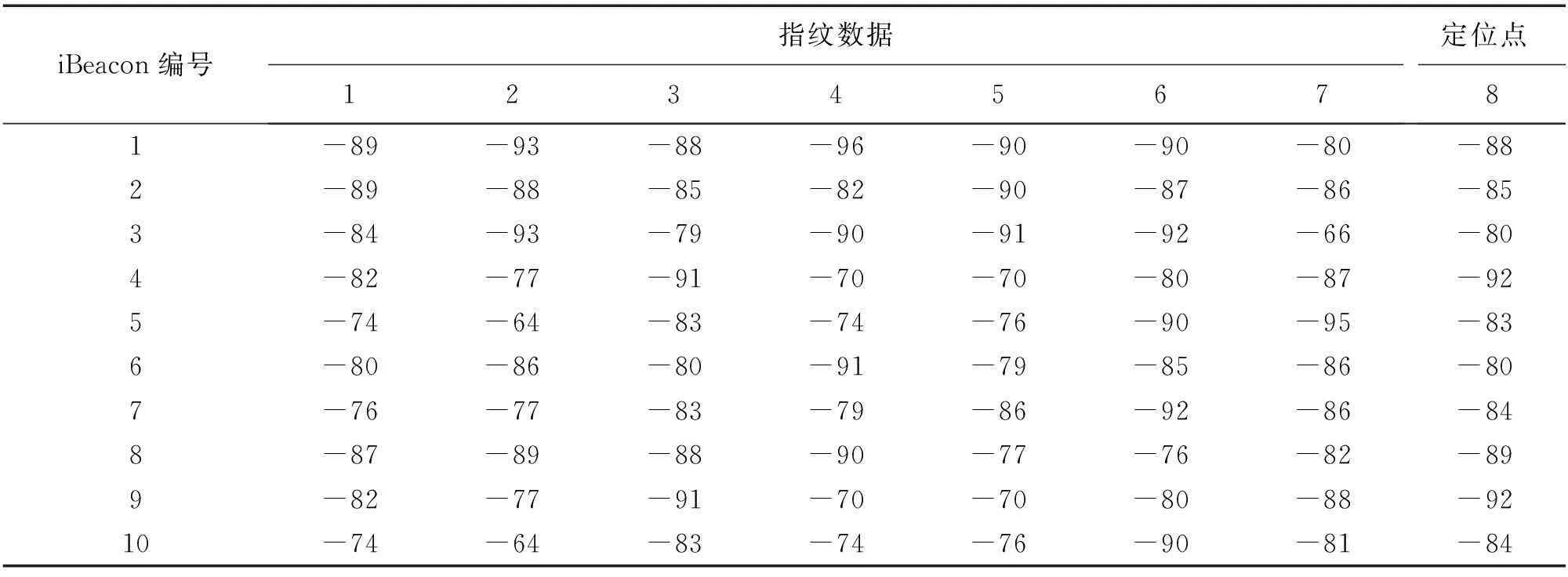
表1 指纹数据库样式表
表格中第1列是iBeacon编号,第2、3行是指纹数据点坐标,其他数字代表了采集得到的指纹点数据。
利用夹角余弦的方法,提取指纹特征。8组指纹特征图表如图4所示。

图4 定位指纹比对图
图中横轴代表iBeacon的编号,纵轴代表指纹的RSSI值。每一条曲线分别代表了不同指纹点在其位置上扫描到每一个iBeacon的RSSI值的分布态势。从图中可以观察到,深黑色的实线待定位点8的RSSI值分布态势与浅黑色的虚线指纹数据参考点3的RSSI值分布态势是最接近的。因此可以判断出待定位点的实际空间位置在参考点3位置附近,如图5所示。
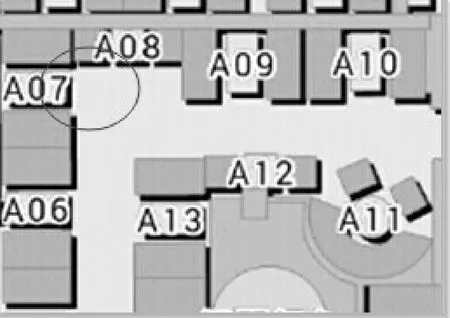
图5 与指纹库比对后定位点位置图
圆形区域为参考点1位置区域。通过地图匹配,待定位点被移位到可通达区域内,如图6所示。

图6 地图匹配后定位图
地图上的定位箭头为当前定位解算给出的位置,这与操作员的实际所在位置相差0.3 m,然后操作员由西向东开始行走,测试定位跟踪,定位点跟踪与操作员的实际行走状态存在延迟,时间为400 ms左右。
在该试验环境下测试了100个定位点,定位精度统计如图7所示,根据试验得出的数据可以发现该试验的定位精度是相当良好的,平均定位误差为1.21 m,最大定位误差为2.1 m。相比于其他定位方法,本方法的定位精度大约提升53%。在实际应用中,1.5 m以下的平均定位误差已经可以满足室内环境下基于位置服务的基本需求。
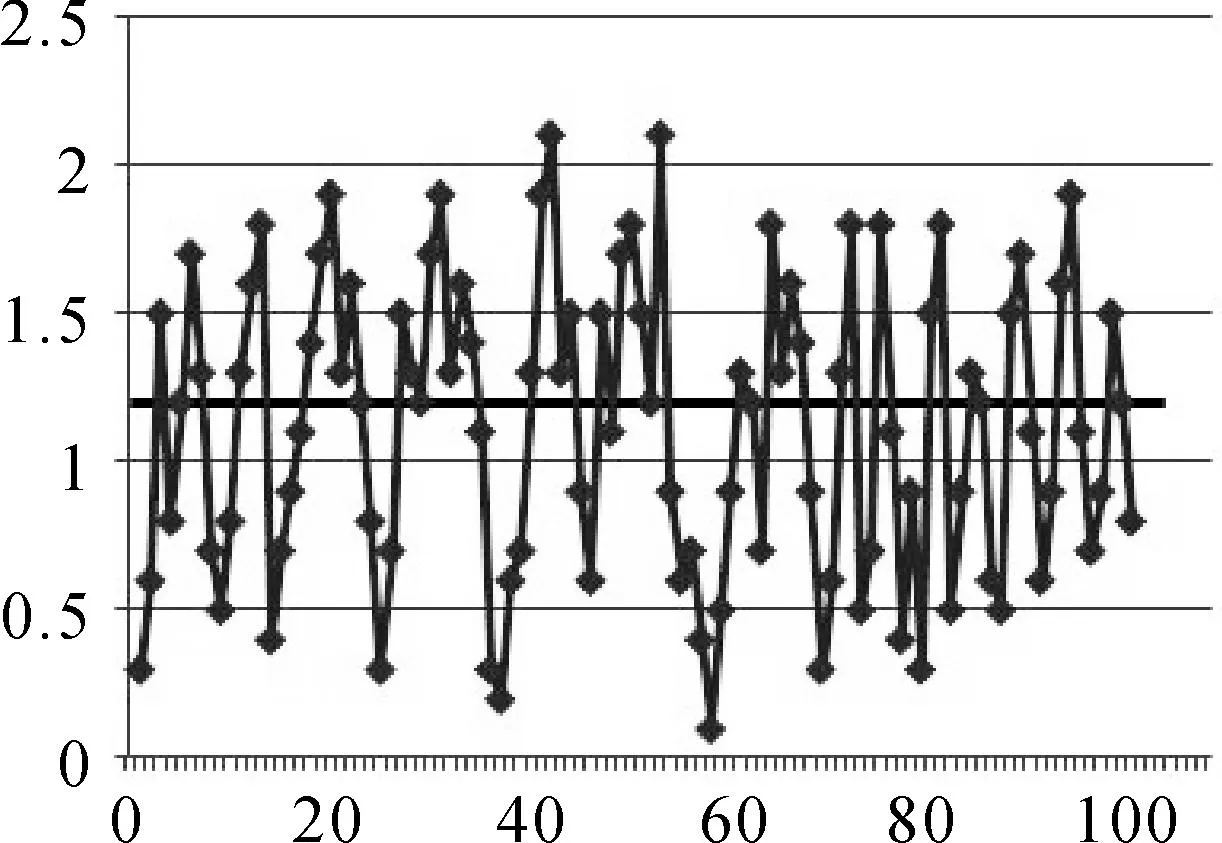
图7 定位精度统计
五、总结与展望
随着近几年蓝牙技术的发展,尤其是蓝牙4.0标准的发布,蓝牙技术的功耗和成本都大大降低,定位的精度也越来越高,蓝牙定位技术已经具备商业推广的条件。
通过该试验的定位测试,得到的定位精度在3 m以内。这种精度足以满足当前业内外室内定位的需求。与其他定位方法比较,蓝牙定位的优势明显,主要体现在以下几个方面:
1) 架设容易。蓝牙基站体积小,而且可以用电池供电,施工简单。
2) 成本低。蓝牙基站iBeacon的成本非常低。基于CSR芯片的基站每个需要30元人民币左右。
3) 功耗低。蓝牙基站及终端功耗已经达到相当低的水平,一个蓝牙基站iBeacon可以依赖纽扣电池持续工作半年以上。
4) 定位精度高。从本试验结果来看,依据本定位算法蓝牙定位的精度可以控制在2.1 m以内,可以满足室内环境下基于位置的服务基本需求。
本试验定位方法以蓝牙手机终端为定位媒介,在位置计算过程中加入了地图匹配技术,通过空间叠加分析过滤后得到的手机终端空间位置相比较现有的室内定位方法,在定位精度与空间位置准确性上都有了显著的提升。在低功耗蓝牙手机终端定位基础上,低通滤波与地图匹配技术是关键因素。该方法在结构相对更加复杂的室内环境下, 蓝牙信号
会受到一定程度的阻碍与反射,排除外界干扰确保蓝牙信号的良性传输将是研究的下一个目标。
参考文献:
[1]许华燕,李志辉,王金月. 室内地图应用现状及展望[J]. 测绘通报,2014(9):119-121.
[2]陈国平,马耀辉,张百珂. 基于指纹技术的蓝牙室内定位系统[J]. 电子技术应用,2013(3):104-107.
[3]张浩,赵千川. 蓝牙手机室内定位系统[J]. 计算机应用,2011,31(11):3152-3156.
[4]李娟娟,张金艺,张秉熠,等. 蓝牙4.0标准规范下的模糊指纹定位算法[J]. 上海大学学报:自然科学版,2013,19(2):126-131.
[5]江德祥,胡明清,陈益强,等. 基于核岭回归的自适应蓝牙定位方法[J]. 计算机应用研究,2010(9):3487-3489.
[6]江德祥. 基于蓝牙传感网络的室内定位研究及在行为识别中的应用[D].湘潭:湘潭大学,2010.
[7]王睿,赵方,彭金华,等. 基于WI-FI和蓝牙融合的室内定位算法[J]. 计算机研究与发展,2011(S2):28-33.
[8]赵咪,刘军发,陈益强,等. 基于定向信号补偿的免标定室内定位方法[J].计算机工程,2012,38(1):276-278.
[9]李文杰,李文明. 基于k-近邻算法的定位方法设计和仿真[J]. 计算机仿真, 2009(4):194-196,351.
[10]赵凯,杨育红,曲保章. 基于位置点匹配的GPS/DR组合导航系统地图匹配算法[J]. 制导与引信,2003(3):24-29.
[11]胡建建,曾培峰,唐莉萍,等. 基于高斯低通滤波的音乐节拍提取[J]. 东华大学学报:自然科学版,2011(1):72-75.
[12]崔斌, 赵西安. 一种基于传播模型和位置指纹的混合室内定位方法[J]. 测绘通报, 2015, 0(6): 35-38,43.
[13]张砚炳,沈嘉琪,岳岱安,等. 基于手机内置传感器的无外源信号室内定位方案[J]. 测绘通报, 2014, 0(10): 60-62.
[14]张俪文,汪云甲,王行风. 仿射传播聚类在室内定位指纹库中的应用研究[J]. 测绘通报, 2014, 0(12): 36-39.
[15]闫凯锋. 基于蓝牙技术的工厂巡检定位和数据通信研究[J]. 中国新通信,2014(5):75-76.
通信作者:胡引翠。E-mail:huyincui@163.com
作者简介:苏 松(1988—),男,硕士生,主要研究方向为地理信息系统 。E-mail: 394009278@qq.com
基金项目:河北省自然科学基金(D2013205077)
收稿日期:2014-11-03
中图分类号:P208
文献标识码:B
文章编号:0494-0911(2015)12-0081-04