激光扫描点云准确快速去噪方法
2016-01-26李明磊李广云宗文鹏
李明磊,李广云,宗文鹏
(1. 信息工程大学导航与空天目标工程学院,河南 郑州 450001; 2. 现代城市测绘国家测绘地理
信息局重点实验室,北京 100001)
Accurate and Fast Denoising Method of Laser-Scanned Point Clouds
LI Minglei,LI Guangyun,ZONG Wenpeng
激光扫描点云准确快速去噪方法
李明磊1,2,李广云1,宗文鹏1
(1. 信息工程大学导航与空天目标工程学院,河南 郑州 450001; 2. 现代城市测绘国家测绘地理
信息局重点实验室,北京 100001)
Accurate and Fast Denoising Method of Laser-Scanned Point Clouds
LI Minglei,LI Guangyun,ZONG Wenpeng
摘要:激光点云数据中孤点和离群点等噪声的自动去除方法是激光点云数据处理的研究热点。本文针对现有孤点的平均点间距阈值探测法存在远距离点云误判的问题,对平均点间距附加距离权重后再根据阈值进行了判断;针对离群点的生长探测法存在效率低的问题,采用均匀八叉树结构以格网为单位进行了生长探测。试验证明了改进方法的自适应性和高效性。
关键词:点云去噪;加权;区域生长;八叉树;格网探测
一、引言
测绘中也有“测不准”的概念,指的即为测量中不可避免地包含误差。地面三维激光扫描仪作为一种测量设备,测量结果中也不可避免地包含各种误差[1],其中一部分误差表现出噪声特性,它的存在影响整个点云数据的分析效率和精度,因此需要对其按照分布大小进行针对性的去除或调整。三维激光扫描测量产生的噪声具有多样性[2-3]:主动无接触覆盖式测量受环境干扰可能产生非测量目标物体表面的无用数据和离群噪声;物体表面的尖锐特征等使激光入射角剧变可能导致测量产生毛刺噪声;无合作目标的激光测距方式必然产生细小的随机噪声。
激光点云数据中的噪声一般不能明确地知道是由哪种因素引起的,只能从直观上予以区分。对于点云中一点Pg,如果其与最近点之间的距离远大于点云的平均点间距,则Pg点称为孤点;对于点云中一点Pl,如果按照某一距离阈值寻找其邻近点时只能找到k个,而第k+1个最近点与Pl及其前k个最近点之间的距离都远大于距离阈值,则Pl及其k个最近点称为离群点,离群点与孤点的区别是离群点成簇出现,单个离群点即为孤点;对于点云中一点Ps,如果Ps距离其所在位置的点云表面并无孤立现象,但Ps的存在影响其所在局部表面的光滑性,则Ps称为毛刺点(不光顺点)。
在激光点云中,由于孤点和离群点等大噪声点存在离群特性,一般作为去噪的研究对象比较容易去除。去噪原用于一维信号数据和二维图像数据中对噪声的处理,本文将点云中因为遮挡或激光扫描的全覆盖性获取的非测量目标上的无用点等离群点、孤点等大噪声的去除作为去噪的主要研究对象。
对于孤点的自动去除,由于激光点云具有远近疏密程度不一致的特点,直接利用单个距离阈值不具有自适应性;针对离群点的自动剔除,基于点的生长方式在离群点块数较多时会因为重新选取种子点的次数过多而导致算法的效率过低。本文主要工作将针对上述问题进行展开。
二、孤点的加权平均距离去除法
已有的孤点去除方法是将距离邻近点之间的距离大于根据点云平均点间距设定的阈值的点作为孤点。这种方式可以通过阈值的有效设定识别孤点,但由于单站激光点云距离测站近处分布稠密而距离测站远处分布稀疏的特点,这种根据点云平均点间距设定阈值的方式可能会导致距离测站近的位置孤点不能被有效检测出来,而距离测站远的位置被测物表面点云也被误作为孤点。
为解决上述问题,本文在计算点云加权平均点间距时将各点距离其k个邻近点的平均距离(点间距)除以点距离坐标原点(测站点)的距离,相当于将所有点的点间距归算到单位距离(距测站点距离为1)处的点间距;在孤点判定时根据极限误差定义[9]以3倍加权平均点间距为阈值,将加权点间距大于阈值的点作为孤点去除。
三、离群点的格网探测法
为解决以点为单位的按照平均点间距生长的方式在离群点块数较多时效率低的问题,本文利用均匀八叉树[10-11]采用格网生长代替点生长,以八叉树节点为单位进行生长寻找数据块的边界,从而确定每个数据块的点的个数,最终将点数少于某一阈值的数据块作为离群点。具体思路如下:
1) 设定距离阈值(可根据平均点间距设定,也可根据需要按照扫描点间距设定),利用均匀八叉树以距离阈值为划分终止条件将点云分割。
2) 由于均匀八叉树的特点,距离测站过远的位置如果点间距大于距离阈值(一般为非关注区域),会产生大量仅包含一个点的节点,因此为了提高节点生长效率,先对仅包含一个点的节点进行处理,如果节点仅包含一个点并且节点孤立(邻近26个节点都为空节点),则直接标记此节点包含的点为离群点,标记此节点为已探测过节点。
3) 以第1个未被标记的点所在节点(或者编号最接近0的节点)为种子节点,逐层生长并标记被生长节点,以各层被生长节点为新的种子节点继续生长,直至生长过程遇到被生长节点都为空节点时(图1中两块有色区域的隔离方式,无色区域表示空格网),当次生长过程终止,记录此次生长过程中被生长的节点所包含的点为同一个数据块。如果当前数据块生长结束后点的个数小于阈值,将当前数据块标记为离群点。
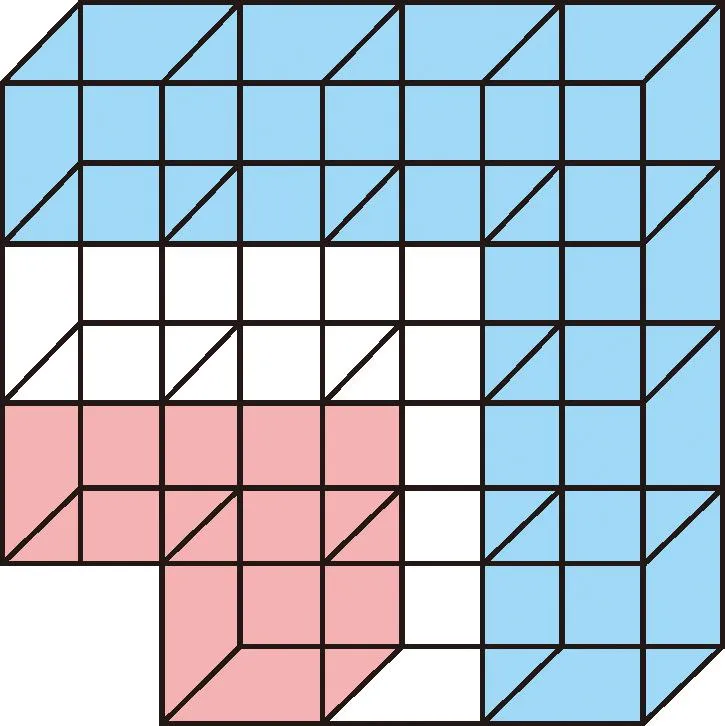
图1 格网分块生长示意图
4) 寻找下一个尚未被标记的节点作为种子节点继续生长,探测其所在的整个数据块,至所有节点都被标记时整个离群点探测过程终止。
从以上过程可知,格网探测法可以避免以点为单位的生长探测过程中点间距离的计算,并且以格网节点为单位的生长可以大大减少生长次数,提高离群点的探测效率。
四、试验验证
为验证本节去噪方法的有效性,利用实验室单站扫描的原始点云进行去噪试验。点云数据包含窗户透射得到的室外树木建筑等离群噪声共3 683 546个点。
图2为利用平局距离法设定距离阈值为3倍平均点间距时孤点探测的结果,选框内墙角区域即为固定距离阈值导致的误判情况,而离测站较远的室外建筑墙面由于数据较稀疏被完全识别为孤点。

图2 平均距离法孤点检测
图3为利用加权平均距离法设定距离阈值为3倍平均点间距时孤点识别的结果。通过与图2结果的对比可发现,墙角处孤点的误判得到一定改善,室外树木主要是树叶点被识别为孤点,而室外建筑物也没有因为点分布稀疏而被识别为孤点,由此说明根据入射距离加权的平均距离阈值具有一定的自适应性。
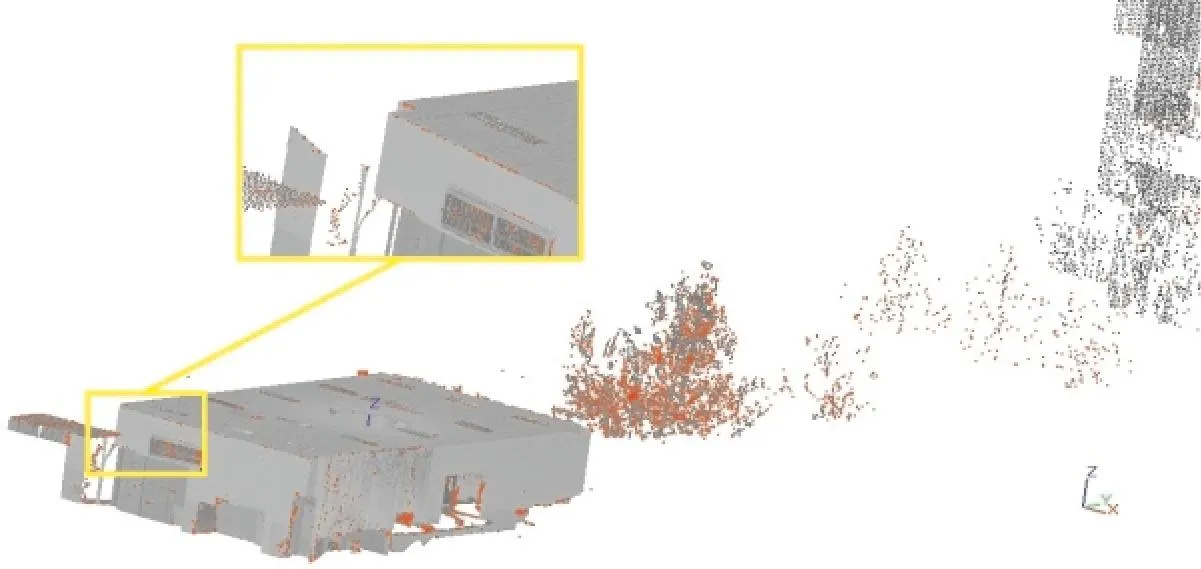
图3 加权平均距离法孤点检测
图4为利用生长方式以5cm点间距为距离阈值(5cm以内点间距的点作为同一块数据以内的点),以1000个点为点数阈值(生长后数据块中点个数小于1000时将其作为离群点)进行离群点判别的结果。
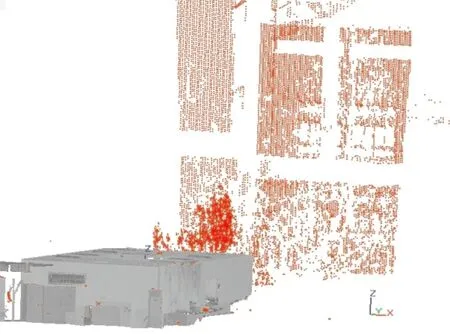
图4 生长算法离群点检测(用时109 342 ms)
图5为同样阈值的均匀八叉树格网探测结果。两种方式得到的离群点判定结果比较接近,都只保留了室内点,但格网探测法在消耗时间上比生长算法有较大优势。
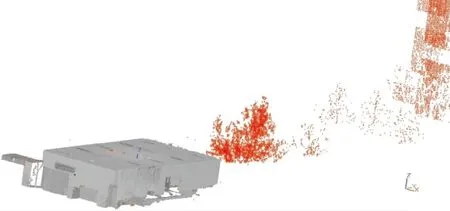
图5 格网探测法离群点检测(用时11 471 ms)
为验证算法对细小孤点和离群点的探测能力,对如图6所示的两站拼接后的正面包含大量边缘噪声(扫描测量时由于粘贴了摄影测量回光标志)、背面包含大入射角噪声(单站测量时每次主测一半,另一半为大入射角)的雷达罩点云进行去噪试验。
将图6所示点云中识别的噪声加色显示,效果如图7所示,基本可以去除大的边缘噪声。
五、结束语
针对孤点的平均距离阈值去除方法存在的不足,采用加权平均距离方式适应激光扫描测量获取的点云数据的分布特点,可在一定程度上避免远距离目标表面点云的误判,具有一定的自适应性;对于以点为单位进行生长探测离群点方式存在的效率低问题,采用基于均匀八叉树的格网的离群点探测法、以格网为单位进行生长,可以提高离群点探测的效率。
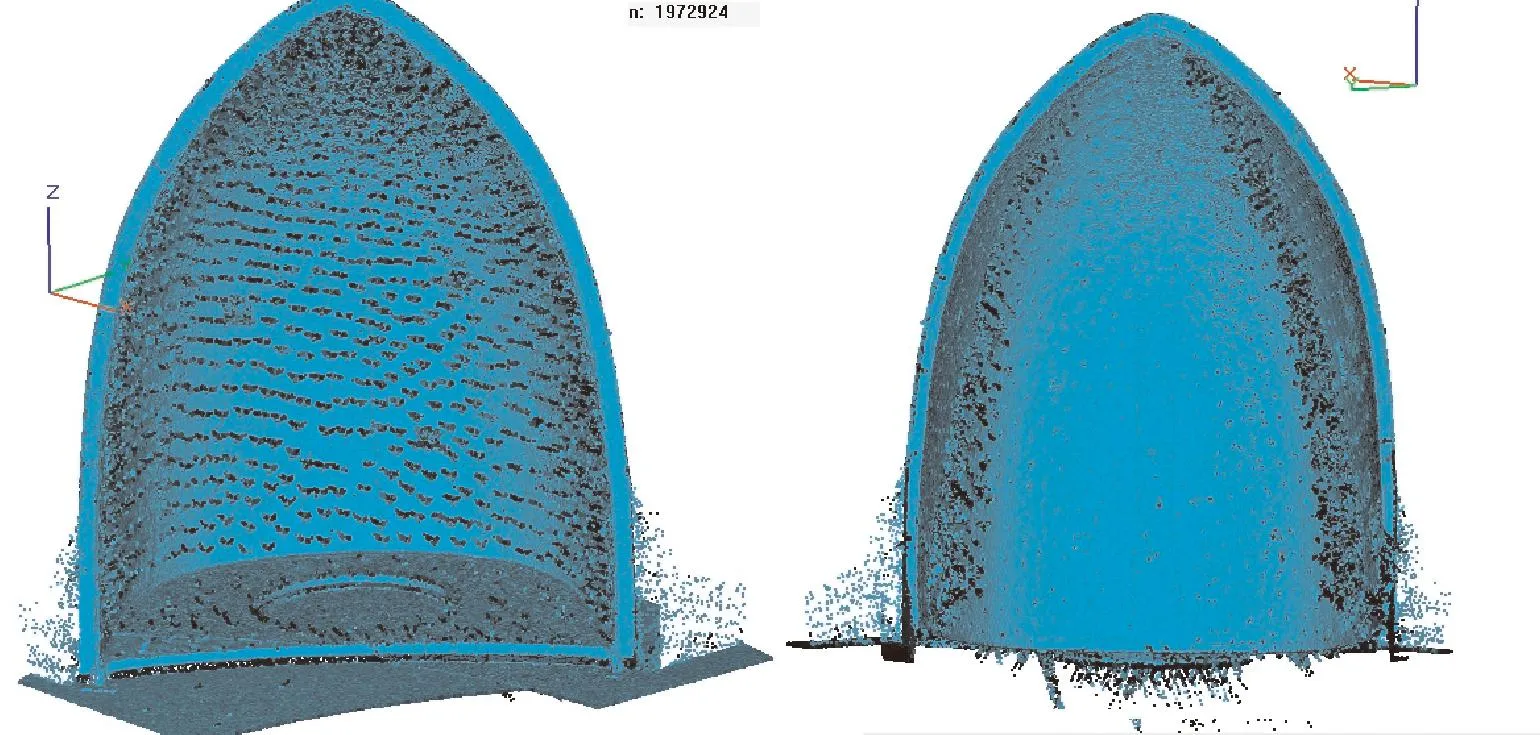
图6 包含边缘噪声的雷达罩点云
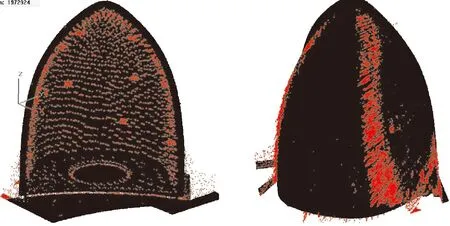
图7 格网探测法去噪效果
参考文献:
[1]GROSSM,DFISTERH.Point-basedGraphics[M].Berlin:MorganKaufmannPublishers, 2007.
[2]李自勤, 李琦, 王骐. 由统计特性分析激光主动成像系统图像的噪声性质[J]. 中国激光, 2004, 31(9): 1081-1085.
[3]孙正林. 三维激光扫描点云数据滤波方法研究[D].长沙: 中南大学, 2011.
[4]FRANKY,CHENGSX.AutomaticSeededRegionGrowingforColorImageSegmentation[J].ImageandVisionComputing, 2005, 23(10): 877-886.
[5]郝慧丽, 刘先勇. 含噪点云预处理技术研究[J]. 微型机与应用,2012, 31(12): 68-70.
[6]张树森, 伏利, 董刚. 离群点删除算法的研究[J]. 装备制造技术,2008(7): 13-15.
[7]聂建辉. 自定位实物数字化技术研究[D]. 大连: 大连海事大学, 2012.
[8]李青蒙. 激光扫描点云处理技术研究[D]. 大连: 大连海事大学, 2013.
[9]隋立芬, 宋力杰, 柴洪洲. 误差理论与测量平差基础[M]. 北京: 测绘出版社, 2010.
[10]马磊, 彭国华, 耿东芳. 基于八叉树的海量测量数据的非均匀简化[J]. 计算机应用,2007, 27(8): 2027-2029.
[11]张会霞. 基于八叉树的点云数据的组织与可视化[J]. 太原师范学院学报:自然科学版,2011, 10(3): 128-132.引文格式: 陈华,邓喀中,张以文,等. 结合SIFT和RANSAC算法的InSAR影像配准[J].测绘通报,2015(12):30-33.DOI:10.13474/j.cnki.11-2246.2015.371
作者简介:李明磊(1989—),男,博士生,主要从事激光点云数据处理、精密工程测量等方面的研究工作。E-mail:mingleili_xd@163.com
基金项目:国家自然科学基金(41274014);航天器精密测量基金(2014-3;2014-5);现代城市测绘国家测绘地理信息局重点实验室开放基金(20131204WY)
收稿日期:2014-11-22
中图分类号:P232
文献标识码:B
文章编号:0494-0911(2015)12-0027-03
引文格式: 李明磊,李广云,宗文鹏. 激光扫描点云准确快速去噪方法[J].测绘通报,2015(12):27-29.DOI:10.13474/j.cnki.11-2246.2015.370