四轮独立的轮毂电机驱动型电动汽车控制系统研究
2016-01-22范庆科孟庆华郭思晨郑慧峰
范庆科,孟庆华,郭思晨,郑慧峰
(1.杭州电子科技大学机械工程学院,浙江 杭州310018;
2.中国计量学院计量测试工程学院,浙江 杭州310018)
四轮独立的轮毂电机驱动型电动汽车控制系统研究
范庆科1,孟庆华1,郭思晨1,郑慧峰2
(1.杭州电子科技大学机械工程学院,浙江 杭州310018;
2.中国计量学院计量测试工程学院,浙江 杭州310018)
摘要:针对四轮独立轮毂电机驱动型电动汽车的差速转向问题,提出了一种基于DSP芯片的无刷直流轮毂电机电子差速控制系统。建立了无刷直流电机的数学模型和电子差速控制策略,给出了控制系统的硬件设计及调速方法。试验表明,该控制器能实现电动汽车的电子差速、调速控制等功能,体现了良好的动态响应和稳定特征,验证了电子差速控制系统设计的合理性。
关键词:差速转向;无刷直流轮毂电机;数学模型;电子差速控制系统
0引言
相对于传统的燃油汽车通过机械式的功率输出来驱动车轮,轮毂电机内置驱动型电动汽车将机械刚性传输变为电控柔性传输,从而省去了机械传动部件如离合器传动轴、变速器、驱动桥、差速器等部件[1]。四轮独立驱动的轮毂电机驱动型电动汽车的电子差速控制策略的设计主要依据Ackermann-Jeantand模型构建速度计算方程,并根据整车动力匹配参数来计算内外车轮不同的转速,通过电控方式来保证内车轮和外车轮在转弯行驶过程中以可控制的速度差独立驱动每个车轮[2]。
电子差速是研究电动汽车核心技术之一,国内外学者对其有较多研究[3-4]。本文以自行设计的四轮独立驱动的轮毂电机驱动型电动汽车上的额定电压为48 V、额定功率为500 W的无刷直流轮毂电机为控制对象,设计了一种完整的电机驱动和电子差速控制器。
1无刷直流电机模型的建立
无刷直流电机模型的建立分为理论分析法和系统辨识法[5]。工程实践表明,采用无刷直流电机本身具有的相变量去构造时域状态方程和数学模型能够得到比较准确的结果[6]。
由于三相定子绕组采用Y型连接且完全对称,故有ia+ib+ic=0,三相电压平衡方程:

(1)
式中,M为两任意定子绕组之间的互感,L为定子绕的自感;Rr为定子每相绕组的电阻,ea,eb,ec分别为三相定子反电动势瞬时值,ia,ib,ic为三相定子电流瞬时值,ua,ub,uc为三相定子电压瞬时值。
电磁转矩方程为:

(2)

2电子差速策略
本文的电子差速策略依据的是Ackerman-Jeantand电子差速模型[7]。根据电子差速模型,通过计算可以得到内外侧轮速计算公式:

(3)
式中,V1为前轮转向内侧轮速,V2为前轮转向外侧轮速,V3,V4分别为对应前轮的后轮的轮速,V为当前车速,B为轮距,L为轴距,δ为前轮转向角。
差速策略采用外侧车轮转速不变,只改变内侧车轮转速的简化方式,本实验样车轮距为130cm,车身轴距为130cm,当前的车速通过DSP采样的到,将实验样车的整车信号代入可得:

(4)
3控制系统硬件设计
考虑到轮毂式无刷直流电机的工作原理、“三相六拍”的驱动方式,设计了对应的IGBT电机驱动控制系统方案。IGBT选用的是英飞凌公司的IKW50N60T,选择IR公司的栅极驱动集成电路,主要外围电路包括转子位置的霍尔信号处理电路、IGBT开关逻辑处理电路、电机驱动电路、过流保护电路和稳压电源电路。
3.1 逻辑处理电路
逻辑处理电路主要是针对PWM信号和电机转子换向逻辑信号进行处理,实现三相电机上下桥臂的逻辑硬件互锁、死区控制,防止出现单相上下桥臂同时导通。A相逻辑处理电路如图1所示。

图1 A相逻辑处理电路
3.2 霍尔信号处理电路
霍尔信号处理电路主要是根据转子磁极变化输出霍尔信号电平变化,从而由电平时序变化得出电机转子相对于定子的磁极位置。
3.3 过流保护电路
为了保护电机及控制器,需要在控制系统中加入电流检测以及过流保护电路,其电路主要由LM358以及相应的电阻电容一起构成两个运放电路构成,电路中的输入电流是通过串联在电机电枢上的康铜丝采样得到。
3.4 电机驱动电路
本文所用到的IGBT驱动控制芯片是专门的大中功率驱动芯片IR2110,具有较好的抗噪声效果,其具有独立的高低输出通道[8]。HIN、HO为高通道输入(输出),LIN、LO为低通道输入(输出)[9]。为防止IGBT漏源极间的射频电压干扰,电机驱动电路分别在高、低通道输出串联一个无感电阻,其一相的电路设计如图2所示。
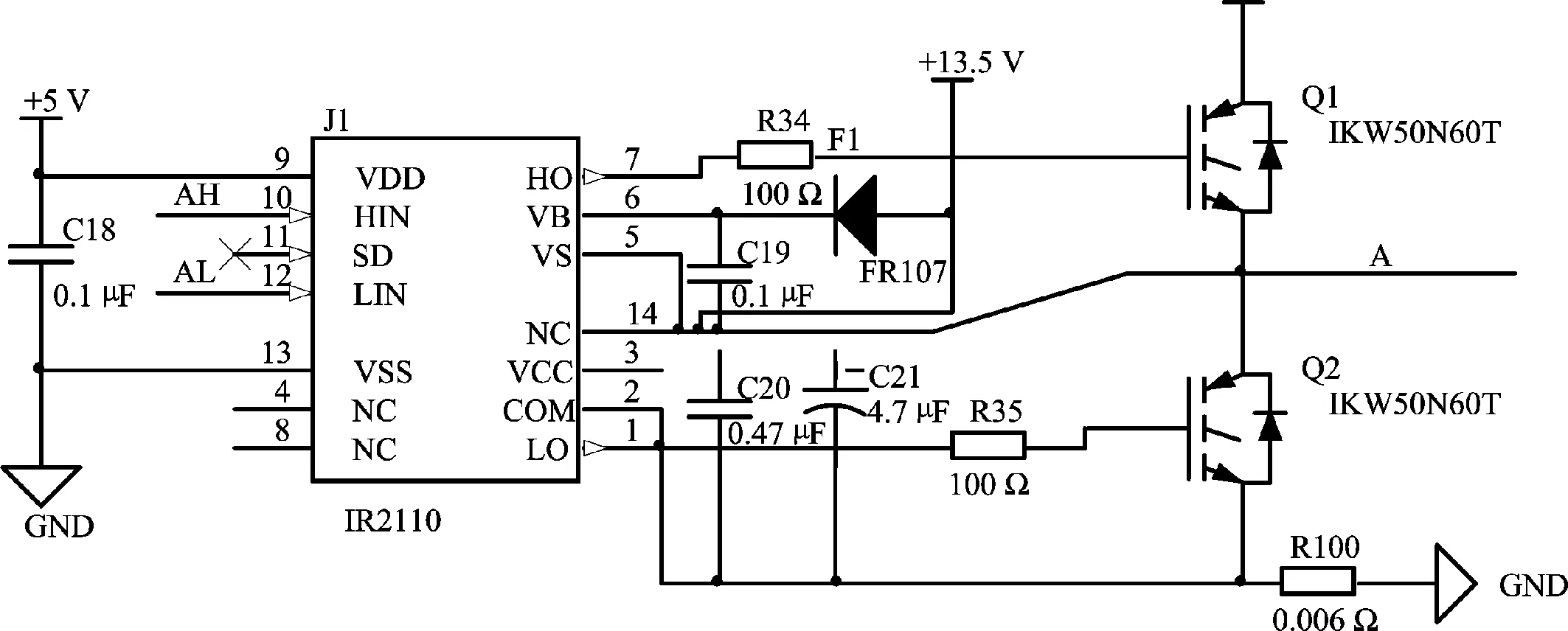
图2 电机驱动电路
4实验结果
4.1 PWM输出测试
控制系统以额定电压48 V、额定功率500 W的无刷直流电机为样机,在不同的PWM占空比下测试独立驱动的轮毂电机输出的变化。初始时刻PWM占空比不为零,而是有一个很窄的占空比,然后在逐渐的加大输入加速信号,从而得到前后轮输出波形。如图3为加速信号2.8 V输出形图。

图3 加速信号为2.8 V波形输出
4.2 电机转速输出与加速指令输入关系


图4 四轮转速与加速指令曲线图
4.3 电子差速实验结果
转向实验时,保持加速信号不变,改变方向盘转角信号,实验样车最大转角为45°,实测得到的电机4个轮子的转速结果如表1、表2所示。
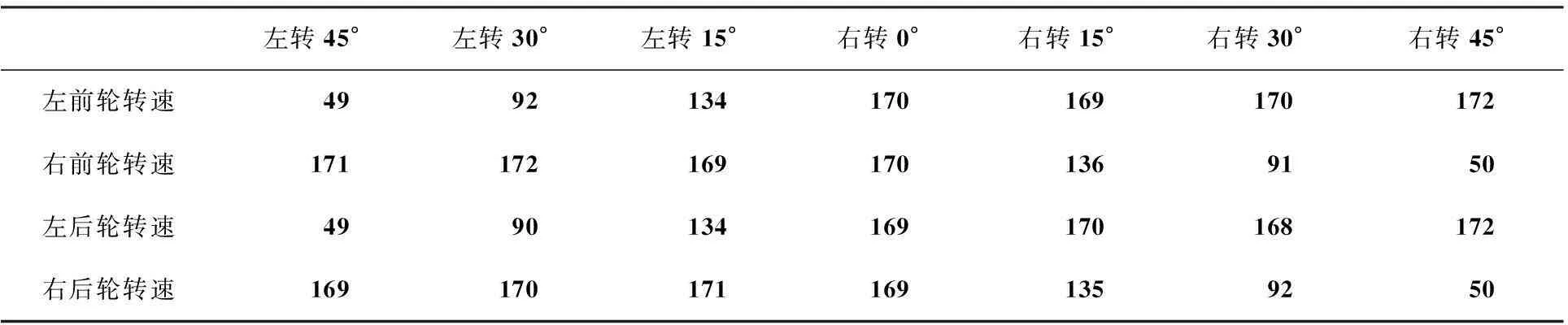
表1 加速信号为2.5 V时的四轮差速结果 r/s

表2 加速信号为1.8 V时的四轮差速结果 r/s
从上述两张表格的数据分析可知:转向时前后内侧两个车轮转速大致一样,且按照差速控制策略,轮速较外侧车轮降低,方向盘转角改变时差速也改变,控制器运行稳定可靠,能满足四轮独立轮毂电机驱动电动汽车所用的无刷直流电机驱动控制要求。
5结束语
本文以自主研制的四轮独立驱动电动汽车所用的无刷直流电机为对象,充分考虑电动汽车对控制器的功能要求,建立了无刷直流电机数学模型和电子差速策略,设计加工了一种基于DSP芯片TMS320F2812的无刷直流轮毂电机控制器,给出了硬件电路设计方案。实验结果表明,所设计的控制器运行可靠稳定,验证了所提出的控制系统设计方案的合理性。
参考文献
[1]孟庆华,许进,王东峰,等.轮毂电机驱动型电动汽车动力系统研究[J].农业机械学报,2013,44(8):33-37.
[2]曾洁,张吉庆,罗金修.轮毂电动汽车的车辆控制器设计与实现[J].南阳理工学院学报,2012,4(6):56-59.
[3]喻厚宇,黄妙华,张振国.电动轮车电子差速控制的试验研究[J].武汉理工大学学报,2011,33(5):147-151.
[4]Zhao Y,Zhang J.Modelling and simulation of the electronic differential system for an electric vehicle with two-motor-wheel drive[J].International Journal of Vehicle Systems Modelling and Testing,2009,4(1-2):117-131.
[5]张琛,刘刚.直流无刷电动机原理与应用[M].北京:机械工业出版社,1996:36-42.
[6]秦刚,张翔洲,周振东.基于灰色PID控制的智能车差速转向系统研究[J].机电工程,2015,32(2):240-245.
[7]周勇,李声晋,田海波,等.四轮毂电机电动车的电子差速控制方法[J].电机与控制学报,2007,11(5):467-471.
[8]陶海敏,何湘宁.IR2110在驱动大中功率IGBT模块中的应用[J].电工技术杂志,2002,(9):44-46.
[9]林淡芸,罗文广,张昊,等.电动汽车用永磁无刷直流电机控制器的设计[J].广西工学院学报,2012,23(2):37-40.
Study of Control System for Four-wheel Independent Electric Vehicle Driven by In-wheel Motors
Fan Qingke1,Meng Qinghua1,Guo Sichen1,Zheng Huifeng2
(1.SchoolofMechanicalEngineering,HangzhouDianziUniversity,HangzhouZhejiang310018,China;
2.CollegeofMetrology&MeasurementEngineering,ChinaJiliangUniversity,HangzhouZhejiang310018,China)
Abstract:Aiming at the problem of differential steering for four-wheel independent electric vehicle driven by in-wheel motors,a kind of control system for in-wheel brushless DC motor was proposed based on DSP.A mathematical model of brushless DC motor was established and an electronic differential control strategy was proposed.Then,the hardware circuit structure of control system and speed regulation methods were given.The testing results not only indicate that the controller can achieve functions of differential operation and speed control,reflecting its good dynamic response and stability performance,but also prove the reasonableness of the design of electronic differential control system.
Key words:differential steering;in-wheel brushless DC motor;mathematical model;electronic differential control system
中图分类号:U461.1
文献标识码:A
文章编号:1001-9146(2015)06-0065-05
通信作者:
作者简介:范庆科(1991-),男,浙江江山人,在读研究生,电动汽车驱动控制技术.孟庆华副教授,E-mail:mengqinghua@gmail.com.
基金项目:国家自然科学基金资助项目(51105124);浙江省自然科学基金资助项目(LY16E050003);浙江省“仪器科学与技术”重中之重学科开放基金资助项目(JL130111)
收稿日期:2015-04-16
DOI:10.13954/j.cnki.hdu.2015.06.014
