腾庆选煤厂重介密度控制系统中数字PID调节器的改进与应用
2016-01-19杨树朝
杨树朝
(1.中煤科工集团唐山研究院有限公司,河北 唐山 063012;2.河北省煤炭洗选工程技术研究中心,河北 唐山 063012)
贵能腾庆选煤有限责任公司选煤厂(以下简称“腾庆选煤厂”)设计能力为1.50 Mt/a,选煤工艺为无压给料三产品重介质旋流器分选、浮选、干燥的联合工艺。该选煤厂入选原煤来自腾庆煤矿,为极难选煤,主要产品为精煤、中煤、煤泥、矸石,其中精煤作为冶金、化工用煤,中煤作为发电厂燃料,煤泥作为民用燃料,矸石运至排矸场处理。在该厂试生产阶段发现,即使重介质旋流器的分选密度发生细微波动,精煤产率和灰分也会受到较大的影响,这对选煤生产的正常进行极为不利。为此,从生产控制系统入手,对重介密度控制系统的PID调节器进行改进,目的是在提高精煤产率和保证精煤灰分的同时,提升控制系统的控制精度和稳定性,减少系统稳态误差。
1 重介密度控制系统结构
腾庆选煤厂原重介密度控制系统结构框图[1]如图1所示。在原方案设计中,加水执行机构安装在合介泵的泵根处,采用比例、积分组成的PI调节系统实现悬浮液密度的自动调节。PI控制系统具有结构简单、响应速度快的优点,只要时间足够,积分总能消除误差,但其抗扰能力差,容易发生振荡,动态性能较差,控制精度不够[2]。
相比之下,数字PID控制算法则是通过PLC编程实现,执行机构为加水调节阀门,被控对象为合介桶内的悬浮液密度,测量元件为带放射源的密度计。数字化后的位置式控制器算法为:
(1)
式中:u(k)为第k个采样的控制器输出;KP为比例系数;e(k)为第k个采样的偏差;e(j)为第j个采样时刻的偏差;T为采样周期;TI为比例系数。

图1 重介密度控制系统结构框图
2 重介密度控制系统中数字PID调节器的改进
由于常规的PI控制系统消除稳态误差较慢,调节时间长,抗干扰能力弱[3],为了提高控制系统的稳定性,改善控制效果,保证精煤产品质量,需对原控制器进行改进。
2.1 引入微分控制
根据实际生产需要,将加水阀门安装在二楼合介桶的上方,由于合介桶的容积较大,悬浮液密度变化存在滞后性,为避免产生震荡现象,必须引入微分控制组成PID调节系统。引入微分控制后的重介密度控制系统结构如图2所示,其位置式控制器算法[4]为:
(2)
式中:e(k-1)为第k-1个采样的偏差;e(j)为第j个采样时刻的偏差;TI为积分系数;TD为微分系数。

图2 引入微分控制的重介密度控制系统结构框图
2.2 积分分离法
在一般的PID控制中,系统出现较大扰动或大幅改变给定值时,由于此时存在较大偏差,系统会出现惯性和滞后现象,在积分作用下,会产生较大的超调和长时间的波动[5];当选煤厂频繁启停车时,悬浮液混合不均匀,密度波动较大,干扰尤其明显。为此,采用积分分离法对重介密度控制系统PID调节器进行改进,当偏差e(k)较大时,取消积分作用,只采用比例、积分进行快速调节;只有在偏差e(k)较小时,才需引入积分作用。u(k)计算式为:

(3)
式中:ki为引入的分离系数,当|e(j)|≤I-step时,ki=1;当|e(j)|>I-step时,ki=0(这里I-step为积分分离阀值)。
2.3 抗积分饱和控制
加水执行机构有两个极限位,即调节阀全关和全开;在Step-7编程环境中,u(k)为“0000H”时,加水阀全关,u(k)为“6C00H”时,加水阀全开[6]。长时间出现偏差或偏差较大时,计算出的控制量u(k)就可能溢出或小于零。如果执行机构已到达极限位置,但仍不能消除偏差时,由于积分作用,PID差分方程所得的运算结果就会继续增大或减小,但执行机构已无相应的作用,进而形成积分饱和。当出现积分饱和时,势必使超调量增加,控制质量变坏。为了防止出现积分饱和,在执行机构到达极限位时,不再进行积分项累加,而只执行能削弱积分项的运算,即在执行机构全关时,只累积正偏差,在执行机构全开时,只累计负偏差。抗积分饱和计算式为:

(4)
2.4 不完全微分控制
由于加水调节阀安装位置发生变化,为了防止震荡,在系统中引入了能够超前控制误差的微分项[7]。将式(1)中的微分项单独列出来,可得到式(5):

(5)


(1)微分项的输出仅在第一个周期起激励作用,由于悬浮液密度的变化具有滞后性,即被控对象的时间常数较大,微分调节作用则变得很小,无法起到超前控制误差的作用。
(2)uD(k)的幅值KD一般较大,容易致使PLC中数据溢出,这不利于执行机构工作。


(6)
式中:U(s)为控制器输出的拉氏变换;Tf为惯性系数;E(s)为偏差的拉氏变换;UP(s)为比例输出项的拉氏变换;UI(s)为积分输出项的拉氏变换;UP(s)为微分输出项的拉氏变换。
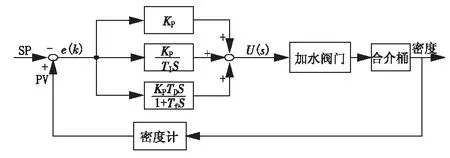
图3 引入不完全微分的重介密度控制系统结构框图
与普通的位置式PID相比,式(7)存在差异,将其进行拉氏逆变换[9],得到微分方程式(8) ,经差分方程离散化后得到式(9),将其整理后得到式(10):

(7)

(8)

(9)

(10)
式中:uD(t)为控制器时域输出;t为时间;uD(k)为第k个采样时刻的控制器输出;e(t)为偏差;e(k)为第k个采样时刻的偏差。
当e(k)为阶跃函数时,uD(k)的输出为:
……
微分输出在第一个采样周期的脉冲高度有所下降,可以避免执行机构溢出;此后其逐渐衰减,可以延长微分项的作用时间。引入不完全微分后,能够克服微分项的上述两个缺点,对滞后性较大的控制对象也能获得较理想的控制特性。采用不完全微分后,只需要用uD(k)替换式(3)中的微分项就可求出PID的输出u(k)。
2.5 带死区的PID控制
为了避免加水执行器的控制动作频繁操作,也为了消除频繁动作引起的震荡,在系统中引入一个死区控制[10],如图4所示。

图4 引入带死区控制的重介密度控制系统结构框图
相应的死区判断式见式(11)。死区B是一个可调参数,具体的数值可根据实际生产中的控制需要设定。如果B值太小,调节就会过于频繁,达不到稳定被控对象的目的;如果B值过大,系统就会产生很大的滞后;如果B值为0,其就是常规的PID控制。

(11)
3 结语
针对腾庆选煤厂原常规比例积分控制系统稳态误差不易消除,调节时间长,抗干扰能力差的问题,对其数字调节器进行了改进,在引入了不同的控制后,系统稳态误差可以迅速消除,且误差能够控制在±0.5%以内;同时,系统抗干扰能力增强,稳定性提高,避免了超调和长期波动问题的发生,为精煤灰分的稳定和精煤产率的提高提供了保障。
[1] 薛维东,殷海宁.选煤自动化实用技术[M].北京:煤炭工业出版社,1996.
[2] 杨树朝.天源煤炭有限公司洗煤厂生产自动控制系统[J].煤炭技术,2015(11):334-335.
[3] 杨树朝,张卫君.数字PID在能达选煤厂重介密度控制系统中的应用[J].选煤技术,2011(3):52-54.
[4] 胡寿松.自动控制原理:第5版[M].北京:科学出版社,2007.
[5] 曹承志.微型计算机控制新技术[M].北京:机械工业出版社,2001.
[6] 廖常初.大中型PLC应用教程[M].北京:机械工业出版社,2008.
[7] 胡寿松.自动控制原理:第4版[M].北京:科学出版社,2001.
[8] 戴忠达.自动控制理论基础[M].北京:清华大学出版社,1991.
[9] 多尔夫,毕晓普.现代控制系统[M].谢红卫,孙志强,宫二玲,等,译.北京:电子工业出版社,2011.
[10] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,1998.
