六维加速度传感器的研究现状及发展趋势
2016-01-15尤晶晶李成刚左飞尧何斌辉吴洪涛涂桥安
尤晶晶 ,李成刚 ,左飞尧 ,何斌辉 ,吴洪涛 ,涂桥安
(1.南京林业大学机械电子工程学院,南京 210037; 2.南京航空航天大学机电学院,南京 210016;3.江苏师范大学传媒与影视学院,江苏徐州 221116)
第一作者尤晶晶男,博士,讲师,1985年生
六维加速度传感器的研究现状及发展趋势
尤晶晶1,李成刚2,左飞尧3,何斌辉1,吴洪涛2,涂桥安1
(1.南京林业大学机械电子工程学院,南京210037; 2.南京航空航天大学机电学院,南京210016;3.江苏师范大学传媒与影视学院,江苏徐州221116)
摘要:基于产品性能的高精尖发展需求,指出了研究六维加速度传感器的必要性。根据输入信号的作用部位对六维加速度传感器进行了分类,分析了各类型的本质属性和适用场合,并指出它们之间的关联。以解耦算法为主线,详细阐述了近十年来国内外学者在六维加速度传感器领域所做的工作及取得的成果,进一步提炼出个体的创新思想和共同面临的技术瓶颈。通过深入挖掘六维加速度传感器的解耦机理,找到了解决瓶颈问题的突破口,同时针对亟需解决的关键技术和未来的发展趋势给出了几点思考。得出的结论和展望给从事这一领域的研究者们提供了较有价值的参考。
关键词:六维加速度传感器;原理样机;解耦算法;误差模型
基金项目:国家自然科学基金资助项目(51405237);江苏省高校自然科学研究资助项目(14KJB460020);南京林业大学高学历人才基金资助项目(GXL2014045)
收稿日期:2014-04-17修改稿收到日期:2014-06-13
中图分类号:TH825
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.11.027
Abstract:The necessity of studying six-axis accelerometers was presented based on engineering practice’s requirements for sensors with high level, precies and sophisticated performances. Six-axis accelerometers were classified according to positions of imput signals. Their essential attributes, applicable areas and relationships between them were analyzed. The progresses and achievements obtained by domestic and foreign scholars in this field were expounded in detail. Some innovative ideas and technical bottlenecks for this type accelerometers were pointed out. Through deeply studying the decoupling mechanism of six-axis accelerometers, a sally port was found to solve bottleneck problems. At last, the key technologies needed and the future trends of this type sensors were presented. The conclusions and prospects provided a valuabe reference for researchers in this area.
Current studying status and developing trend of six-axis accelerometers
YOUJing-jing1,LICheng-gang2,ZUOFei-yao3,HEBin-hui1,WUHong-tao2,TUQiao-an1(1.College of Mechanical and Electronical Engineering, Nanjing Forestry University , Nanjing 210037,China;2.College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016,China;3.College of Media, Film and Television, Jiangsu Normal University, Xuzhou 221116,China)
Key words:six-axis accelerometer; principle prototype; decoupling algorithm; error model
随着科学技术的不断发展以及人们认识客观世界要求的不断提高,对物体的六维运动(包括沿三个正交轴向的平移运动和旋转运动)特征参量进行探测显得越来越重要。理论上讲,只要测量出位移、速度和加速度三类矢量中的其中之一,就能够通过微分或者积分运算获取物体全面的运动信息。然而,有些情况下待测运动的位移值和速度值较小,而加速度值较大,再加上环境中不可避免的干扰噪声,此时加速度数据的信噪比最理想,也即只有测量加速度信号才能够完全还原出物体运动的真实状态。例如,视觉系统所获影像容易受到外界微小抖动的干扰而产生模糊现象,有必要检测镜头与拍摄物之间的相对加速度,将其反馈给控制系统并通过执行器对镜头实施抖动补偿[1]。外界抖动具有不确定性,可能是任意方向的平移、任意方向的旋转,也可能同时包含了平移和旋转。显而易见,只有具备了同时检测到运动加速度六个分量功能的多维传感器才能够真正胜任视觉系统的检测设备。
除此之外,这类特殊的加速度传感器在机器人动力学控制[2]、惯性导航[3]、生物医疗[4]等领域都有着极其广泛的应用前景,而且随着产品性能朝高、精、尖目标进军的步伐越来越大,可以预见未来对其刚性需求必将越来越突出。
在这样的背景下,从2004年开始,“六维加速度传感器”的概念以及涉及到的关键技术被逐渐明晰化。由于多输入多输出量的强非线性耦合,相比于目前发展较为成熟的单维加速度传感器和三维加速度传感器[5]而言,六维加速度传感器在技术层面上有着本质的区别,其实现机理及潜在的核心技术问题要复杂且丰富得多。也正因为如此,六维加速度传感器受到了国内外学者越来越多的关注,并且迅速成为了一项热门的研究课题。
为了吸引更多的学者深入了解并从事六维加速度传感器的研究工作,早日实现该类多维传感器在我国的实用化目标,本文对其在国内外的研究情况进行了综述。首先,逐一阐述最近十年来几种最为典型的设计构型及其工作原理和适用场合,并对各自的潜在特性进行分析总结;然后,基于现有的研究成果及其方案路线,探讨六维加速度传感器在未来十年甚至更长时间内的研究趋势和发展方向。
1国内外的研究现状
从待测加速度在传感设备上作用部位的角度来看,六维加速度传感器可以划分成 “质量块作用型”和“基座作用型”两大类。
1.1质量块作用型六维加速度传感器
将构件A、构件B分别固定在传感器的质量块和基座上,待测加速度作用在质量块上。通过采集质量块与基座之间若干个敏感元件的输出信号,并借助于一定的算法可以还原出构件A相对于构件B空间运动的三维线加速度矢量以及三维角加速度矢量。本文将能够实现上述功能的惯性类传感器统一称为“质量块作用型六维加速度传感器”。由于这里构件A和构件B可以同时运动,也可以只有一个运动而另一个静止,传感器测量出的仅仅是两构件之间的相对加速度,因此这类传感器也可以称为“六维相对加速度传感器”。
目前,研究类人机器人手腕处的加速度所产生的惯性力对抓取动作的影响,以及开发人类手势识别系统都是比较热门的课题,通过检测多个构件之间的相对六维加速度参量能够为这两项课题提供必备的反馈信息。为此,一批学者对质量块作用型六维加速度传感器展开了研究。

图1 基于四梁结构的六维加速度传感器Fig.1 Six-axis accelerometer based on four-beam structure
Amarasinghe等[6-7]在一种压阻式六维力传感器的基础上进行改进,提出并研究了一种基于四梁结构的压阻式六维加速度传感器,实物样机见图1,整体尺寸为3 mm×3 mm×0.9 mm。质量块通过四根弹性梁连接到传感器的基座上,每根梁上粘贴了5个压敏电阻。借助于6个惠斯通电桥将压敏电阻阻值的变化率转换成电压值,并参考原理样机的有限元仿真结果,将桥路输出电压值所对应的四根弹性梁应变量换算成质量块相对于基座的六维加速度。该设计方案的优点是满足了传感器的微型化制造要求;缺点是灵敏度各向同性度差,且难以从理论上准确建立系统的动力学方程,模型线性化处理之后直接造成传感器的测量精度较低,显然不能用于需要精确测量构件之间相对六维加速度的场合。
孟明等[8-9]提出并研究了一种基于双环状膜结构的六维加速度传感器,原理样机见图2。作用在质量块上的加速度所产生的惯性力引起上膜片、下膜片以及横梁的弹性变形,从而导致粘贴在其表面的多个应变片阻值发生变化。通过有限元仿真的方法得到膜片、横梁的变形量与质量块惯性力之间的对应关系,进而运用牛顿第二定律将惯性力换算成待测加速度的6个分量。从仿真结果可以看出,双环状膜结构具有较高的灵敏度,且各轴向的灵敏度也比较接近。这种设计方案同样是基于六维力传感器的基本原理,其不足之处是对应变片粘贴位置及粘贴方向的精度要求比较高。

图2 基于双环状膜结构的六维加速度传感器Fig.2 Six-axis accelerometer based on double annular membrane
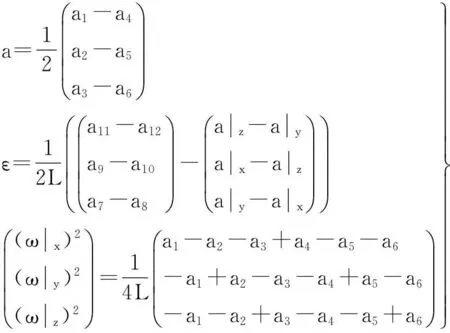
于春战等[10-11]提出并研究了一种基于Stewart平台的六维加速度传感器,原理样机见图3。传感器的弹性体元件为一种改进的Stewart平台,敏感元件为粘贴在六根弹性连接杆上的应变片。在忽略惯性质量块相对于下平台位姿变化的前提下(也即将弹性体结构的力雅可比矩阵近似视为恒定不变),尝试了运用理论建模(不仅仅依赖于软件仿真)的思路研究输入、输出量之间的传递关系。依据矢量积法和并联机构理论推导了6个惠斯通电桥输出电压与作用于质量块上广义惯性力之间的线性关系,并运用牛顿第二定律将广义惯性力转换成相对六维加速度,进而建立被测加速度矢量与六根弹性连接杆应变量之间的数学关系,见式(1)。在此基础上,将系统的基本特征误差和影响误差分别与加速度雅可比矩阵和弹性元件的输出应变矩阵相关联,进一步全面分析了误差对传感器测量精度的影响。基于这种设计方案的传感器比较适合于测量静态或者准静态下的六维加速度,但不适合于测量工作频带较宽的信号。
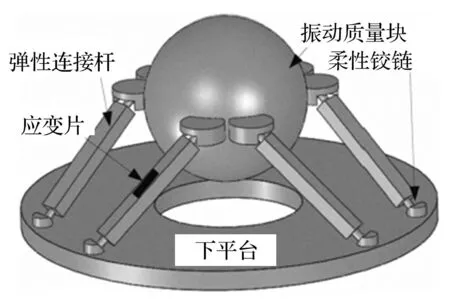
图3 基于Stewart平台的六维加速度传感器Fig.3 Six-axis accelerometer based on Stewart platform

(1)
式中:a、ε为待测的线加速度矢量、角加速度矢量;E为弹性杆材料的弹性模量;A为弹性杆的横截面面积;Ja、Jε为传感器的线加速度雅可比矩阵、角加速度雅可比矩阵;s为沿弹性连接杆轴向的应变矢量。
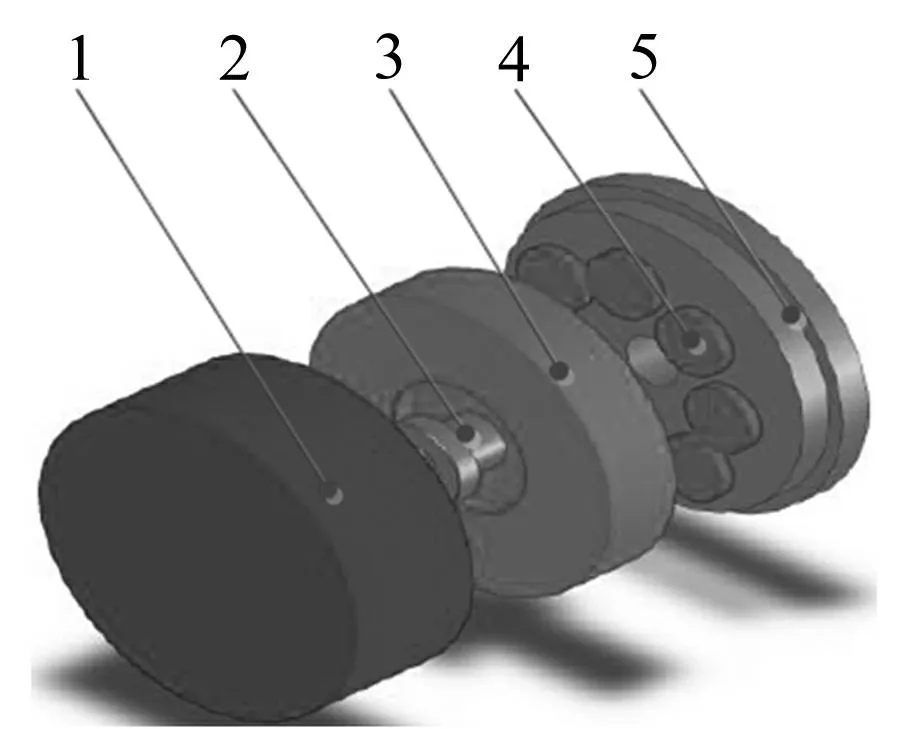
图4 基于八组石英晶组的六维加速度传感器Fig.4 Six-axis accelerometer based on eight quartz groups
李敏等[12]在平板式压电六维力传感器的启发下,提出并研究了一种基于八组石英晶组的六维加速度传感器,原理样机见图4。图4中,数字1代表盖子,2代表预紧螺栓,3代表惯性质量块,4代表石英晶组(八组石英晶组均匀分布在同一圆周上),5代表基座。在假设石英晶组和惯性质量块的各向刚度和灵敏度都绝对相等的前提下,推导出六维加速度传感器输入、输出量的结构模型关系式,与式(1)类似,同样表现为纯线性映射的特性。
以上四类六维加速度传感器是目前为止比较典型的质量块作用型六维加速度传感器,不难看出,学者们对其展开的研究主要集中在解耦算法上。解耦算法的基本思想是首先通过软件仿真或者线性化近似处理的方法得到敏感元件输出量与质量块惯性力之间的传递矩阵,然后运用牛顿第二定律将质量块惯性力换算成作用于质量块上的六维加速度。本质上,质量块作用型六维加速度传感器属于六维力传感器的范畴,它们在数学模型上只相差一个惯性矩阵而已。由于该类型六维加速度传感器的输入、输出量之间最终被简化成纯线性映射的关系,理论上并不需要对其解耦参数实施辨识,直接对仿真或试验数据进行线性拟合就能够提取出系统的加速度雅可比矩阵。解耦运算时,用加速度雅可比矩阵左乘以敏感元件的输出信号矢量即得到待测的六维加速度。
1.2基座作用型六维加速度传感器
为实现飞行器、汽车、航母等空间运载体的导航、振动测试等功能,需要借助于外部传感设备同时获取载体相对于惯性参考系的三维线加速度以及三维角加速度信息。实际工作时,将传感器的基座直接固连在运动载体上,因此基座的加速度即为待测的六维加速度。考虑到这里测量的是作用在基座上的绝对加速度,本文将这类传感器称为“基座作用型六维加速度传感器”或者“六维绝对加速度传感器”。
基座作用型六维加速度传感器基座的加速运动会带动质量块做伴随运动,由于这两者之间不是刚性连接,因此各自的速度、加速度等运动参量并不相等。与质量块作用型六维加速度传感器不同的是,该类型传感器的工作原理是通过测量质量块相对于基座的运动来反推出基座相对于惯性参考系的绝对六维加速度。显然,从六维加速度的解耦机理上来看,后者比前者要复杂得多,甚至可以说,前者的解耦机理仅仅是后者的一种特殊情况,后者更具一般性。
鉴于此,国内外从事六维加速度传感器研究的大部分学者将工作重点放在基座作用型六维加速度传感器上。从系统中质量块数量的角度来看,这种六维加速度传感器又可以细分为“多惯性质量块构型”和“单惯性质量块构型”两类。
1.2.1多惯性质量块构型
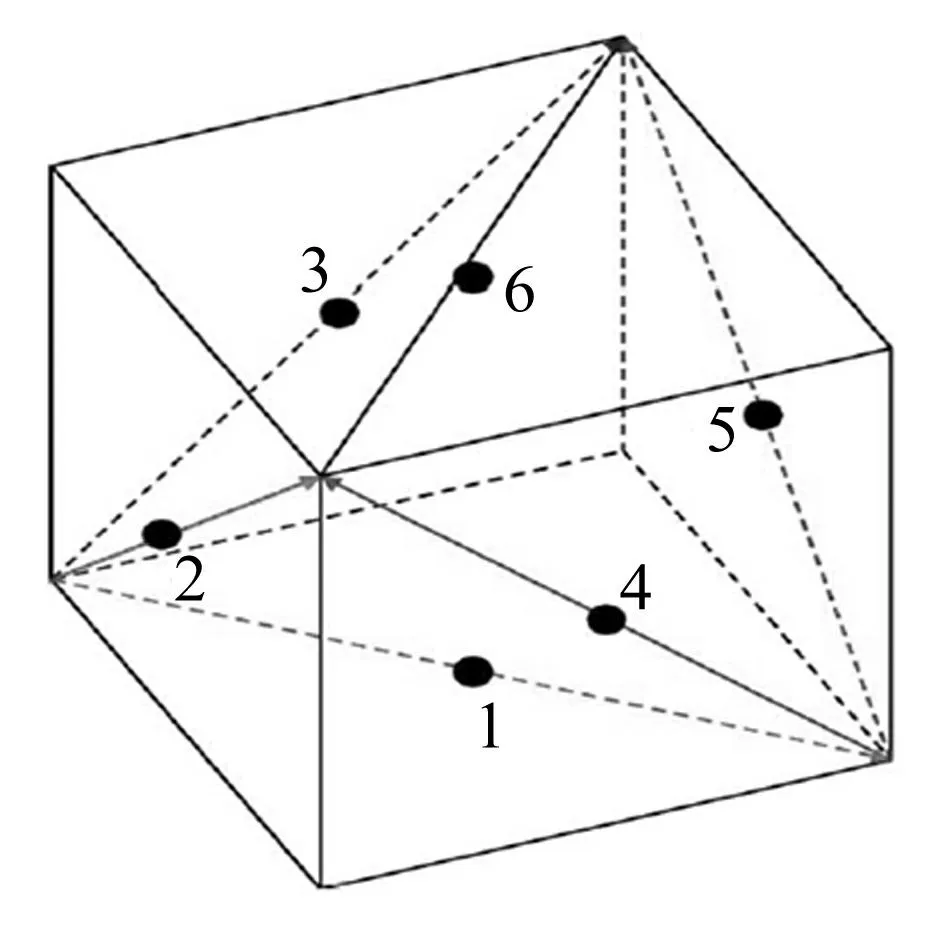
图5 基于6加速度计组合的立方块式六维加速度传感器Fig.5 Cube-style six-axis accelerometer based on six accelerometers
Tan等[13]提出并研究了一种基于6加速度计组合的立方块式六维加速度传感器,原理样机见图5。从导航的观点来看,实际上这属于无陀螺捷联惯导系统的范畴。六个线加速度传感器(加速度计)分别安装固定在立方块六个平面的中心,其敏感轴沿各自安装平面的对角线方向。立方块(基座)刚性固定在运动载体上,感应载体相对于惯性参考系的六维加速度信息。将每个加速度计近似等效成一个“弹簧-质量”系统,能够输出所在位置处沿敏感方向上的线加速度值。为了实现六维加速度的解耦,构建了式(2)所示的解耦方程组,其中前三个是关于转动参量的状态方程,后三个是关于平动参量的代数方程。图5所示的加速度计配置方式能够保证立方块的角加速度仅仅是关于6个加速度计输出值的线性组合,(见式(3)),为六维加速度的实时解耦运算提供了极大的方便,同时这也是该设计方案相比于以往方案最大的优势。
(2)
式中:J为弹性体的构型矩阵;aj为第j个加速度计的输出值;θj为第j个加速度计的安装姿态矢量;uj为第j个加速度计的安装位置矢量;Ω为与角速度矢量相对应的反对称矩阵
(3)
式中:l为立方块的半边长
Tan等接下来还分析并给出了组合式六维加速度传感器的两个先决条件,即:①弹性体的构型矩阵可逆;②至少需要6个加速度计。另外,他们对加速度计的安装误差问题也进行了深入研究,并提出了一种“二步法”用于校准加速度计的安装误差,其具体操作步骤为:第一步,在静态条件下,借助于重力效应,校准加速度计的安装方向误差;第二步,通过沿不同方向施加恒角速度旋转驱动,校准加速度计的安装位置误差。
针对“二步法”中可能出现的校准结果不唯一的问题,Hung等[14]在上述操作步骤的基础上进行改进:首先,从理想输出信号的角度将全部加速度计划分成线性无关的两组;然后,通过多点试验依次比较每一组加速度计的理想输出值与实际输出值之间的差异,辨识出所有加速度计真实的安装误差和输出误差。改进之后的校准效果得到一定程度的改善,但式(3)本身却产生了变异,因此总体效果并不理想。
基于6加速度计组合的立方块式六维加速度传感器除了对加速度计的安装精度要求高以外,最大的缺陷是系统误差随时间发散得比较严重。产生该现象的一个重要原因是在对角加速度进行数值积分以计算角速度的过程中不可避免地引入了截断误差和舍入误差,两类误差又进一步传递到立方块的旋转矩阵中,进而整体传递至下一个采样时刻。针对上述不足,Park等[15-17]在立方块的质心处沿3个正交方向安装了3个加速度计,从而构成了基于9加速度计组合的立方块式六维加速度传感器。运用扩展Kalman滤波技术,将3个冗余加速度计的测量数据与基于原构型理论计算出的立方块质心处的线加速度数据进行融合,进而对理论计算出的角速度进行修正。计算机仿真结果表明,该方法在一般条件下能够有效抑制解耦加速度的误差扩散。
扩展Kalman滤波的性能很大程度上取决于状态估计系统的局部非线性度,因此,在实际应用中经常会出现算法不收敛的情况[18-19]。针对该问题,有学者尝试着对滤波算法进行修正,一定程度上改善了其收敛特性,然而却是以降低计算效率为代价的[20]。
为了削弱由角速度的数值计算而引起的加速度误差累积效应,同时避免在对冗余传感信息进行数据融合过程中所产生的不收敛现象,有必要对颇具经典的基于6加速度计组合的立方块式六维加速度传感器的结构构型及其解耦算法进行改进或修正。
王代华等[21-22]通过对图5中的六维加速度传感器中6个加速度计的配置方式进行调整,提出并研究了一种基于共面的6加速度计组合方式的六维加速度传感器,原理样机及实物样机见图6。六个加速度计被依次固定在立方体的六条首尾相连且相互垂直的棱边的中点处,它们的质心位于同一个平面上,且其敏感轴与各自所处的棱边重合。显而易见,改进后的布局方式具有结构紧凑、安装方便的优点。

图6 基于共面的6加速度计组合式六维加速度传感器Fig.6 Combined type six-axis accelerometer based on coplanar six accelerometers
在对图6中的六维加速度传感器实施加速度信号解耦时,王代华等忽略了传感器基座的角速度和旋转角度,也即假设待测运动的转动幅度和频率小至可以忽略不计。在此前提下,推导并给出了待测六维加速度是各加速度计输出值加权求和,且权重由加速度计的安装位置矢量和安装姿态矢量决定的结论。简化后的解耦方程(见式(4)),对应的解耦算法具有无累积误差、不需要初始对准以及计算效率高的优点。然而,由于在建立动力学方程时简化了转动特征参量,上述解耦算法仅能适用于待测载体做微幅转动的场合,其泛化能力欠佳。

针对压电式传感器无静态响应的特点,袁刚等[23]提出了与图6中的六维加速度传感器构型相匹配的校准方法,其具体操作步骤(“三步法”)为:第一步,通过多次测量并计算传感器静止时输出量的平均值,校准加速度计的输出偏差;第二步,通过沿不同方向给传感器基座施加正弦规律线加速度的激励,校准加速度计的输出放大系数误差和安装姿态误差;第三步,通过沿不同方向给传感器基座施加正弦规律角加速度的激励,校准加速度计的安装位置误差。
在不限制载体运动规律的前提下,为了彻底避开关于角速度微分方程组的数值求解,Lin等[24-25]在由3个两维加速度传感器组成的全加速度计测量装置上添加了1个三维陀螺仪,用于直接检测传感器基座的角速度矢量。实际工作时,通过对加速度传感器以及陀螺仪的输出数据进行简单的代数运算,即可得到基座的六维加速度值。这种设计思想在理论上能够保证传感器具有较高的测量精度,然而由于添加了1个三维陀螺仪,使得整个系统的成本高、功耗大、体积大、动态范围有限,这与无陀螺捷联惯导系统的设计初衷相违背。另外,仿真结果也表明加速度计以及陀螺仪的安装误差对测量结果的影响比较大。
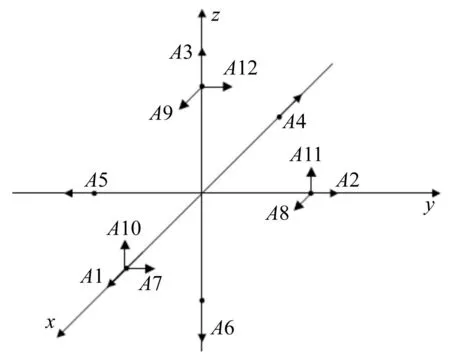
图7 基于12加速度计组合的坐标轴式六维加速度传感器Fig.7 Coordinate axis type six-axis accelerometer based on twelve accelerometers
覃方君等[26]提出并研究了一种基于12个加速度计组合的坐标轴式六维加速度传感器,加速度计的布局结构见图7。分别在三个垂直坐标轴的正轴上沿三个正交方向安装3个加速度计,在三个负轴上沿所在坐标轴的方向安装1个加速度计,且同一个正轴上3个加速度计的理论安装位置保持重合。满足上述安装配置方式的六维加速度传感器系统对应于九个解耦方程(见式(5))。其中,前三个方程为用加速度计输出值线性表示的基座质心处的3个线加速度分量,中间三个方程为用加速度计输出值以及基座质心的3个线加速度分量线性表示的基座转动的3个角加速度分量,后三个方程为用加速度计输出值线性表示的基座转动的3个角速度分量的平方值。

在实际解耦过程中:首先,分别根据前三个线性方程、后三个线性方程直接计算基座质心的3个线加速度分量以及基座3个角速度分量的绝对值;然后,根据中间三个线性方程直接计算3个角加速度分量,并运用数值积分的方法获取它们所对应的角速度的正负号,连同角速度的绝对值一起构成3个角速度分量的具体数值;最后,运用三阶Hermite插值法计算基座的旋转矩阵,并将加速度矢量投影到惯性参考系中。这种设计方案最大的优势是不需要精确计算关于角速度的常微分方程组(获取正负号即可),且不需要借助于陀螺仪就能够获取到基座转动的角速度矢量,具有理论计算精度高、设备成本低的优点。然而,由于正轴上3个加速度计的实际安装位置几乎不可能保证绝对重合,这会引入较大的原理性误差,因此,实际测量过程中往往难以达到较高的解耦精度。
由于机械结构和安装尺寸的限制,加上基座角运动的影响,特别是当运动载体处于高动态情况下,图7所示的六维加速度传感器存在比较严重的尺寸效应误差。尽管很多学者[27-30]提出了一些方法用于补偿该尺寸效应误差,但要么由于需要添加昂贵的硬件设备而提高了系统成本,要么由于需要构建繁琐的修正算法而降低了计算效率,该问题至今还没有一个较为理想的解决方案。
不难发现,以上几类基座作用型六维加速度传感器的一个共同点是它们都是由若干个线加速度计(个别还配备了陀螺仪)通过某种布局方式组合而成的,且每个加速度计内部均含有一个用于产生惯性力的质量块。多质量块的质心不一致,这导致系统对各加速度计的安装精度要求非常高,工程实现起来相当困难。另外,由于独立的单维加速度传感器都存在一定的横向灵敏度,基座的角运动会在加速度计上引起动态误差。鉴于此,一些学者开始考虑将多个质量块合并在一起,以避开以上两个由于多质量块而带来的问题。
1.2.2单惯性质量块构型
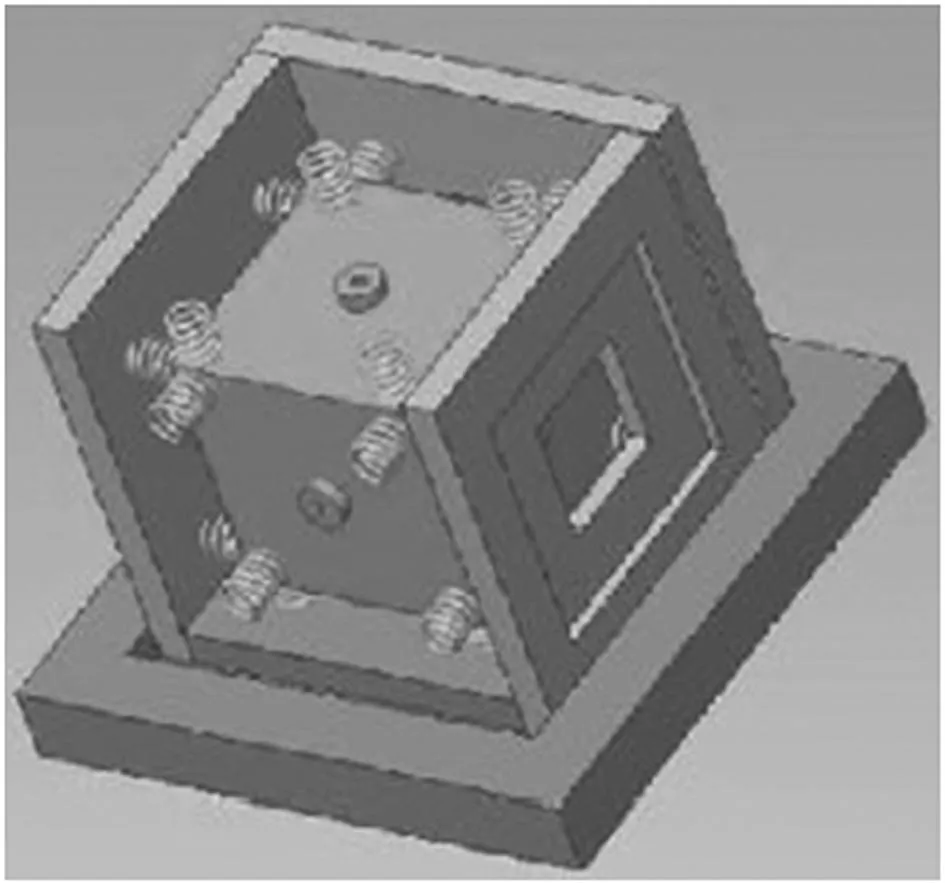
图8 弹簧光电型单质量块六维加速度传感器Fig.8 Spring photoelectric type six-axis accelerometer based on single mass
Chapsky等[31]提出并研究了一种弹簧光电型的单质量块六维加速度传感器,原理样机见图8。整个系统由1个立方体惯性质量块、24个连接质量块顶点与基座内壁的且起支撑作用的弹簧、6个粘贴在基座内表面且与质量块上出射光孔相对的光学位置敏感探测器、1个位于质量块中心的光电二极管以及基座组成。当有外界加速度作用于基座上时,由于产生了惯性力,质量块相对于基座的位姿会发生改变,这时6个光学位置敏感探测器就能检测到相应点处的位移变化数据。
在六维加速度的解耦过程中,Vladimir Chapsky等将惯性质量块在传感器测量过程中的绝对位姿近似视为始终与其初始状态时的位姿相重合,也即忽略了质量块的运动。这样,基座的六维加速度与质量块上几个测量点沿探测器敏感方向的位移之间就能够满足简单的线性关系。显然,这种近似处理所带来的六维加速度解耦的原理性误差是相当大的。因此,这类弹簧光电型单质量块六维加速度传感器仅适用于需要确定加速度的方向或基本变化趋势的场合,对于需要精确测量加速度大小的场合并不适用。
崔峰等[32-34]提出并研究了一种静电悬浮型单质量块六维加速度传感器,原理样机见图9。质量块与基座之间不直接接触,而是通过静电力将质量块悬浮在电极腔的中心。当缓慢变化的、微弱的加速度作用在传感器基座上时,质量块会偏移其平衡位置,这样质量块与定子电极之间所构成的差动电容就会发生微小的变化。闭环负反馈控制系统根据检测到的电容变化量在极板上施加相应的反馈电压,反馈电压所产生的静电力能够使质量块又重新回到零位平衡位姿。进一步分析可知,在位移变化量很小的情况下,通过简单的线性运算就可以将反馈电压转换成待测的六维加速度。这类六维加速度传感器的体积小,且在测量微重力环境中的载体运动时具有相当高的灵敏度。 然而,静电悬浮型传感器容易发生高压击穿,因此不能承受较大加速度的输入。另外,由于引入了负反馈控制系统,相应地增加了传感器结构设计的复杂性,而且对外接电路的性能也提出了较高的要求,这些无疑都提高了系统的整体成本。
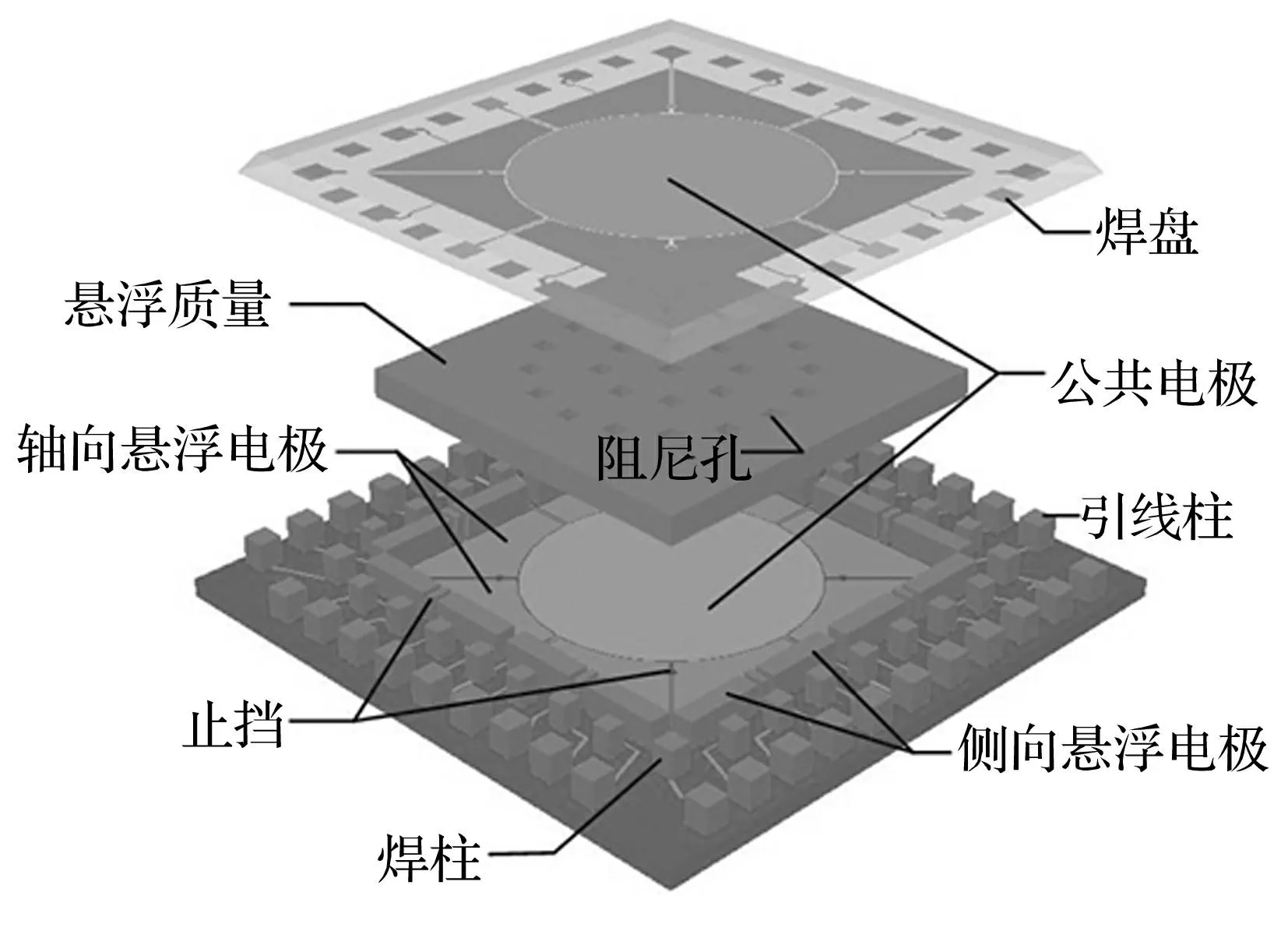
图9 静电悬浮型单质量块六维加速度传感器Fig.9 Electrostatic suspension type six-axis accelerometer based on single mass
考虑到并联机构具有刚度大、精度高、承载能力强、结构紧凑且稳定等诸多潜在优点,国内外很多学者对其进行了深入的理论、仿真和试验研究,并且在运动学、静力学、动力学以及控制方面取得了丰硕的成果[35-40]。为了充分利用并联机构自身的优势以及前人的研究成果,尤晶晶等目前一共提出了两代基于并联机构的六维加速度传感器(本文也将其称为“并联式六维加速度传感器”)模型。
尤晶晶[41]公布了所在科研团队的研究成果,也即提出并研究了一种基于6-SPS并联机构的压电式六维加速度传感器,原理样机见图10。分别将正交型6-SPS并联机构的上平台和下平台作为六维加速度传感器的惯性质量块和基座(外壳)。原理样机中一共有六条完全相同的支链,且每条支链都是由1组圆柱状压电陶瓷和2个弹性球铰链串联而成的。在所设计六维加速度传感器的机械结构中,压电陶瓷同时充当了并联机构的移动副以及传感器的敏感元件,弹性铰链(也可以称之为“柔性铰链”)消除了传统铰链存在的间隙、摩擦等问题,且可以为未来实现六维加速度传感器的微型化制造提供条件[42]。
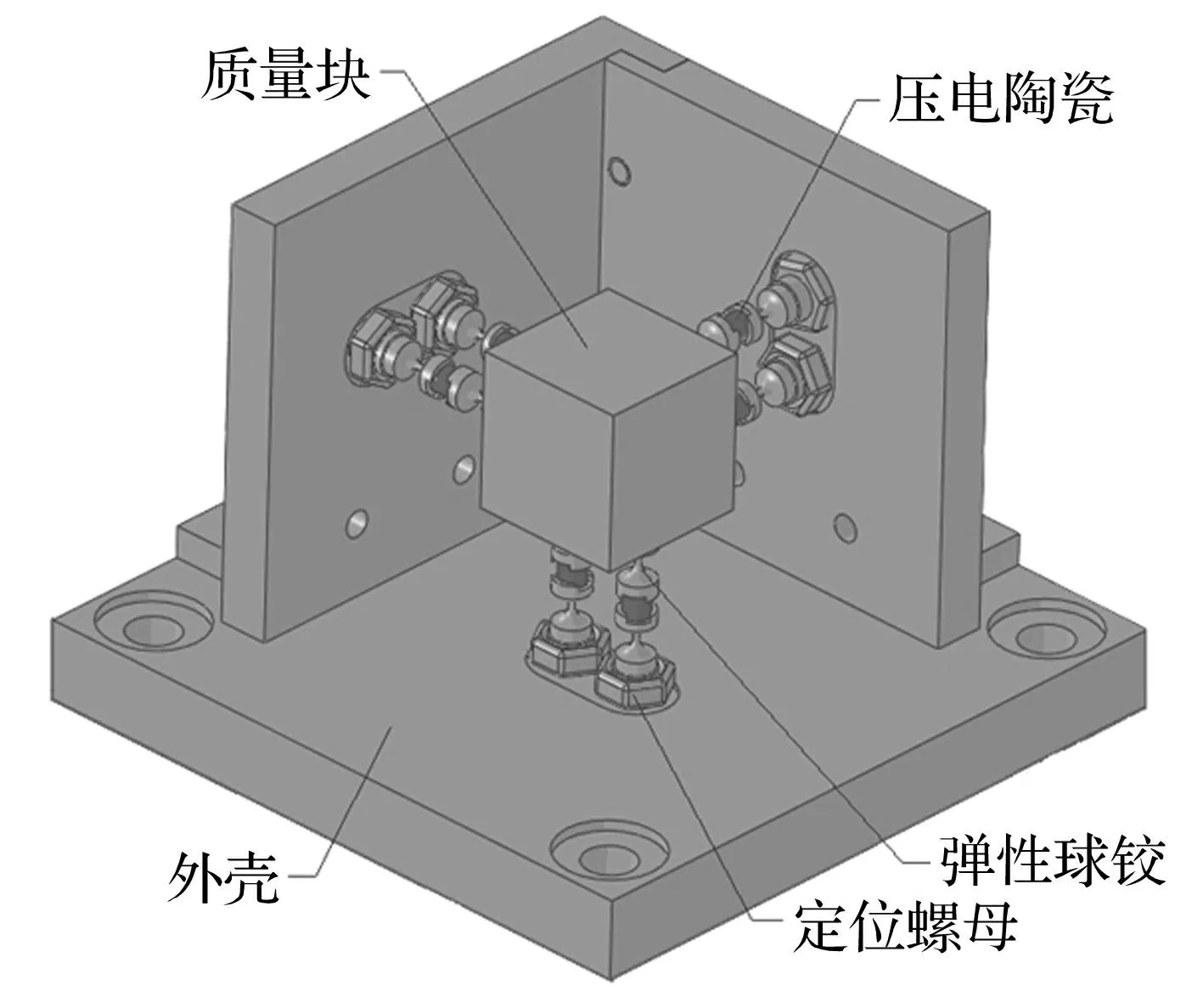
图10 基于6-SPS并联机构的六维加速度传感器Fig.10 Six-axis accelerometer based on 6-SPS parallel mechanism
考虑到压电陶瓷的质量较轻(相比于惯性质量块的质量可以忽略不计),且两端通过三自由度球面副分别与质量块的外壁和外壳的内壁相固连,各支链可近似视为二力杆。也就是说,理论上所有支链上的敏感元件不会受到横向影响,这也是并联式传感器的一大优势。六维加速度传感器在实际工作时,外壳刚性固定在待测载体上一起做加速运动,质量块在惯性力的作用下压缩或拉伸支链。各支链上压电陶瓷受到纯轴向力的作用,且受力方向与其极化方向平行。由于正压电效应,压电陶瓷的两极会产生电荷,且电荷量的多少与作用在外壳上六维加速度的大小有关。
文献[41]中详细给出了六维加速度的解耦方案:首先,测量出所有压电陶瓷两端的电荷量,并运用压电理论[43]将其换算成支链的变形量;然后,运用并联机构正向运动学理论将支链的变形量换算成质量块相对于外壳的位姿;最后,用外壳相对于惯性参考系以及质量块相对于外壳的运动参量来表示质量块相对于惯性参考系的运动参量,进而通过建立并求解系统的动力学方程得到待测加速度的6个分量。将加工制作出的第一代并联式六维加速度传感器实物样机安装固定在标准的LabworkET-127激振器上进行了试验,试验结果较为理想,有效验证了并联式六维加速度传感器设计方案的可行性。
之后,尤晶晶等运用拓扑理论又综合出了一种基于四面体构型的含混合单开链支路的9-SPS冗余并联机构,且理论分析结果表明该机构具有初始位姿空间内零奇异、运动学正解封闭、冗余信息可用于处理次级噪声、解耦特性优越,以及拓扑构型紧凑且对称等众多优点[44]。鉴于此,用其充当六维加速度传感器的弹性体结构,原理样机见图11。

图11 基于9-SPS并联机构的六维加速度传感器Fig.11 Six-axis accelerometer based on 9-SPS parallel mechanism
针对该构型的并联式六维加速度传感器,尤晶晶等还从解耦算法[45-47]、结构优化[48]、参数辨识[49]三个方面进行了深入研究和探讨。将第二代实物样机安装在自行研制的试验平台上,并从其输入量程范围内任意选取20组目标加速度值进行试验。不失一般性,给出其中3组试验的结果(见表1),显示其测量误差不大于7.5%(误差主要来源于噪声干扰及信号调理过程),综合精度优于同类型传感器,进一步有效验证了并联式六维加速度传感器设计方案的合理性以及解耦算法的可靠性。

表1 并联式六维加速度传感器的测量误差
2研究趋势的展望
纵观六维加速度传感器的国内外研究现状,目前这还是一项仍处于探索阶段的课题。通过深入剖析已有研究成果的技术路线,不能发现,六维加速度传感器最突出的技术瓶颈在于六维加速度完全解耦的难度与传感器系统结构的复杂程度之间存在矛盾。解耦难度决定了传感器能否最终实现高精度、高效率、高稳定性地测量,结构复杂度决定了传感器的加工、装配及安装方便与否,以及在以上过程中所引入的误差对测量结果造成的影响如何。人们往往需要通过提高系统结构的复杂度来降低解耦算法的难度,或者通过提高解耦算法的难度来降低系统结构的复杂度,正是这两者之间的矛盾关系制约了六维加速度传感器的研究进程。缓解、甚至彻底解决蕴藏在六维加速度传感器背后的解耦难度与结构复杂度之间的矛盾是学者们梦寐以求的奋斗目标和基本出发点。
一般情况下,为实现绝对六维加速度的传感,离不开三大组成要素,包括用于产生惯性力的质量块、用于将传感器固定在运动载体上的基座,以及用于感应质量块相对于基座运动参量的敏感元件。敏感元件的布置方式有很多种,系统的动力学模型与之直接相关。也就是说,六维加速度的解耦难度是由敏感元件的布置方式来决定的。不合理的或者较复杂的布置方式使得人们根本无法准确推导出系统的动力学模型,从而导致六维加速度的完全解耦非常困难。为了降低解耦难度,一般除了需要提高系统结构的复杂度之外,人们往往还会对待测运动施加一定的限制性条件,或者对非线性模型进行线性化处理,而它们却分别是以缩小传感器的适用范围和降低六维加速度的解耦精度为代价的。严格来讲,这些还仅仅是权宜之计,并不能从根本上解决解耦与结构之间的矛盾。
解耦难度是由组成要素的布置方式决定的,同时布置方式又关系到结构的复杂度,由此就不难找到解决上述矛盾问题的突破口,即综合出结构简单的、耦合特性优越的机构,并用其充当六维加速度传感器的弹性体结构。
国内外学者对六维加速度传感器已经做了大量而有实效的工作,取得了一定的研究成果。然而,由于六维加速度传感器是一项多学科交叉的庞大而极富挑战性的课题,涉及到的许多关键技术问题还没有得到完美解决,需要留待今后进一步地深入探讨:
(1)在由敏感元件输出数据求解运动载体的角速度矢量以及旋转矩阵时,一般需要借助于递推算法,这会导致解算结果随时间发散,也即存在误差累积效应。针对该问题,可以通过提取并分析特定的运动特征参量,构建系统的误差模型,进而对解耦数据实施在线的或者离线的补偿以消除累积误差;也可以通过结合其它辅助测量方法[50-52](如视觉系统、GPS等),运用多信息融合技术进行组合校正。其中,后者本质上是利用滤波技术对冗余信息进行优化组合,显然,滤波算法的品质决定了最终的检测效果。考虑到任何滤波方法都是由积分公式衍生出的,有必要从多种积分公式出发,对逐一凝炼出的滤波方法进行探讨和优化,以寻找到真正适合于六维加速度传感器与其它辅助设备的数据融合方案。
(2)从动力学角度来看,六维加速度传感器是一个相对比较复杂的系统,目前还无法用解析法来求解涉及到的微分-代数方程,而经典的时域有限差分法又存在数值稳定性欠佳的不足[53]。为解决Hamilton系统数值计算问题,我国数学家冯康提出了一套新的思想和算法,即“辛几何算法[54-55]”。考虑到辛算法在长时间计算中能给出稳定的数值结果,而且能够较好地保持系统中的各种不变量(即保辛),未来在求解六维加速度传感器的微分-代数方程时引入辛几何算法,进而杂交出匹配于该系统的解耦算法将会是一种可选的策略。另外,在搜寻最合适解耦算法的过程中,不可避免地还会涉及到计算效率与计算精度之间的矛盾,这也是一个值得深入研究的问题。
(3)传感器敏感元件的输出不仅包含所需的有用信息,同时还夹杂着各种干扰噪声,而且各信号之间还会存在串频干扰,因此在进行加速度解耦运算之前还必须对测量数据进行各种抗干扰预处理,这类关键技术问题目前尚未得到很好地解决。压电式传感器的输出端需要配备前置放大器(包括电荷放大器和电压放大器两种),以完成信号的阻抗变换和放大;然而,目前市场上的这些前置放大器都是针对单维传感器而设计的,在用于六维加速度传感器的信号调理时就表现出很多不合理或不方便之处。例如,为了统一不同灵敏度传感器在同一输入信号下的输出结果,前置放大器内部一般都含有归一化模块,该模块对六维加速度传感器的信号处理起不到任何作用,反而会增大系统体积、成本和干扰噪声。由此可见,设计匹配于六维加速度传感器的信号采集与处理系统是一项亟需解决的课题。另外,除了信号处理的硬件平台,还需要开发与之对应的软件平台,以控制数据采集、预处理、解耦运算等全过程。
(4)尽管不少学者已经提出并研究了多种驱动平台、激振平台,但由于六维加速度传感器自身结构以及工作机理的特殊性,现有平台还不能被直接用来对传感器进行参数和性能的标定。文献[49]中提出了一种基于双曲柄滑块机构的试验平台,具有能够输出多种模式的运动、加速度大小和频率可控、可长时间运作等优点,但尚存在加速度频率范围较小、无法实现加速度方向的无极调节等不足。因此,有必要设计出与六维加速度传感器相匹配的标定平台及其控制算法。另外,保证标定平台上六维加速度传感器外壳的旋转轴线精确穿过质量块的质心也是一个值得进一步探讨的问题。
3结论
(1)根据待测加速度的作用部位来划分,六维加速度传感器有“质量块作用型”和“基座作用型”两大类。其中,前者本质上属于六维力传感器的范畴,用于获取构件之间的相对六维加速度;后者又可以被细分为“多惯性质量块构型”和“单惯性质量块构型”两类,用于获取载体在惯性系中的绝对六维加速度。
(2)近10年来学者们所提出的六维加速度传感器的原理构型并不多,工作重心主要倾向于解耦算法的设计及改良。目前,六维加速度传感器的研究尚处于原理探索和论证阶段,距离最终的实用化还较远。
(3)六维加速度传感器的主要技术瓶颈在于解耦难度与结构复杂度之间存在矛盾,解决该问题的突破口是综合出一种结构简单的、耦合特性优越的机构,用于充当六维加速度传感器的弹性体结构。
(4)未来10年,甚至更长时间,六维加速度传感器领域内的学者们将以解决其瓶颈问题为奋斗目标,继续致力于误差累积效应、数值稳定性、专用信号处理模块、标定平台及方法等关键技术问题的研究。
参考文献
[1]Li T H S,Chen C C,Su Y T.Optical image stabilizing system using fuzzy sliding-mode controller for digital cameras[J] .IEEE Transactions on Consumer Electronics,2012,58(2) :237-245.
[2]Peter S,Hubert G.State estimation on flexible robots using accelerometers and angular rate sensors[J].Mechatronics,2012,22(8):1043-1049.
[3]Noureldin A,Karamat T B,Eberts M D,et al.Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications[J].IEEE Transactions on Vehicular Technology,2009,58(3):1077-1096.
[4]Wu H H,Lemaire E D,Baddour N.Activity change-of-state identification using a blackberry smartphone[J].Journal of Medical and Biological Engineering,2012,32(4):265-272.
[5]Beravs T,Podobnik J,Munih M.Three-axial accelerometer calibration using kalman filter covariance matrix for online estimation of optimal sensor orientation[J].IEEE Transactions on Instrumentation and Measurement,2012,61(9):2501-2511.
[6]Amarasinghe R,Dao D V,Toriyama T,et al.Design and fabrication of a miniaturized six degree of freedom piezoresistive accelerometer[J].Journal of Micromechanics and Microengineering,2005,15(9):1745-1753.
[7]Amarasinghe R,Dao D V,Toriyama T,et al.Development of miniaturized 6-axis accelerometer utilizing piezoresistive sensing elements[J].Sensors and Actuators,A:Physical,2007,134(2):310-320.
[8]MENG Ming,WU Zhong-cheng,YU Yong,et al.Design and characterization of a six-axis accelerometer[C].2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain.2005:2356-2361.
[9]吴仲城,孟明,申飞,等.一体化结构六维加速度传感器设计[J].仪器仪表学报,2004,25(4):302-303.
WU Zhong-cheng,MENG Ming,SHEN Fei,et al.Design of a monolithic six-axis accelerometer based on single inertial mass[J]. Chinese Journal of Scientific Instrument,2004,25(4):302-303.
[10]于春战,张新义,贾庆轩,等.类人机器人腕用六维加速度传感器的理论研究[J].仪器仪表学报,2011,32(8):1903-1909.
YU Chun-zhan,ZHANG Xin-yi,JIA Qing-xuan,et al.Theoretical research on a six-axis accelerometer for humanoid robot wrist[J].Chinese Journal of Scientific Instrument,2011,32(8):1903-1909.
[11]YU Chun-zhan,ZHANG Xin-yi,JIA Qing-xuan,et al.Structural research on a six-axis accelerometer for picking robot wrist[J].International Agricultural Engineering Journal,2011,20(2):36-41.
[12]李敏,林志明,刘俊,等.一种新型六维加速度传感器原理研究[J].传感技术学报,2013,26(9):1213-1218.
LI Min,LIN Zhi-ming,LIU Jun,et al.Principle study of a six-axis acceleration sensor[J].Chinese Journal of Sensors and Actuators, 2013,26(9):1213-1218.
[13]Tan C W,Park S.Design of accelerometer-based inertial navigation systems[J].IEEE Transactions on Instrumentation and Measurement,2005,54(6):2520-2530.
[14]Hung C Y,Lee S C.A calibration method for six-accelerometer INS[J].International Journal of Control,Automation,and Systems,2006,4(5):615-623.
[15]Park S,Tan C W,Park J.A scheme for improving the performance of a gyroscope-free inertial measurement unit[J].Sensors and Actuators,A:Physical,2005,121(2):410-420.
[16]Chen T L,Park S.MEMS SoC:Observer-based coplanar gyro-free inertial measurement unit[J].Journal of Micromechanics and Microengineering,2005,15(9):1664-1673.
[17]Chen T L.Design and analysis of a fault-tolerant coplanar gyro-free inertial measurement unit[J].Journal of Microelectromechanical Systems,2008,17(1):201-212.
[18]范志良,刘光斌,张博,等.自适应SCKF在高动态COMPASS信号参数估计中的应用[J].宇航学报,2013,34(2):201-206.
FAN Zhi-liang,LIU Guang-bin,ZHANG Bo,et al.Application of adaptive SCKF in parameters estimation of high dynamic COMPASS signal[J].Journal of Astronautics,2013,34(2):201-206.
[19]高显忠,侯中喜,王波,等.四元数卡尔曼滤波组合导航算法性能分析[J].控制理论与应用,2013,30(2):171-177.
GAO Xian-zhong,HOU Zhong-xi,WANG Bo,et al.Quaternion based Kalman filter and its performance analysis in integrated navigation[J].Control Theory and Applications,2013,30(2):171-177.
[20]李建国,崔祜涛,田阳.飞行器姿态确定的四元数约束滤波算法[J].哈尔滨工业大学学报,2013,45(1):35-40.
LI Jian-guo,CUI Hu-tao,TIAN Yang.Quaternion constrained filter algorithm for spacecraft attitude determination[J].Journal of Harbin Institute of Technology,2013,45(1):35-40.
[21]WANG Dai-hua,Yuan Gang.A six-degree-of-freedom acceleration sensing method based on six coplanar single-axis accelerometer[J].IEEE Transactions on Instrumentation and Measurement,2011,60(4):1433-1442.
[22]袁刚,王代华.一种压电式六维加速度传感器的快速原型及其特性[J].仪器仪表学报,2011,32(2):356-362.
YUAN Gang,WANG Dai-hua.Principle and characteristics of the rapid prototype of a piezoelectric six degree-of-freedom accelerometer[J].Chinese Journal of Scientific Instrument,2011,32(2):356-362.
[23]袁刚,王代华.一种压电式六维加速度传感器的校准方法研究[J].仪器仪表学报,2011,32(8):1681-1689.
YUAN Gang,WANG Dai-hua.Research on a calibration method for piezoelectric six degree-of-freedom accelerometer[J].Chinese Journal of Scientific Instrument,2011,32(8):1681-1689.
[24]Lin P C,Ho C W.Design and implementation of a 9-axis inertial measurement unit[C].2009 IEEE International Conference on Robotics and Automation,Kobe,Japan.2009:736-741.
[25]Lin P C,Lu J C,Tsai C H,et al.Design and implementation of a nine-axis inertial measurement unit[J].IEEE/ASME Transactions on Mechatronics,2012,17(4):657-668.
[26]QIN Fang-jun,XU Jiang-ning,LI An.A novel attitude algorithm for 12 accelerometer based GFINS using hermite interpolation[C].2010 International Conference on Measuring Technology and Mechatronics Automation,Changsha,China.2010:214-217.
[27]游金川,秦永元,杨鹏翔,等.捷联惯导加速度计尺寸效应误差建模及其标定[J].宇航学报,2012,33(3):311-317.
YOU Jin-chuan,QIN Yong-yuan,YANG Peng-xiang,et al.Modeling and calibration of the accelerometer size effect error of the SINS[J].Journal of Astronautics,2012,33(3):311-317.
[28]严恭敏,周琪,翁浚,等.捷联惯导系统内杆臂补偿方法及试验验证[J].宇航学报,2012,33(1):62-67.
YAN Gong-min,ZHOU Qi,WENG Jun,et al.Inner lever arm compensation and its test verification for SINS[J].Journal of Astronautics,2012,33(1):62-67.
[29]周斌,王巍.捷联惯导系统尺寸效应误差及其补偿算法[J].中国惯性技术学报,2012,20(6):631-634.
ZHOU Bin,WANG Wei.Size effect error and compensation algorithm of SINS[J].Journal of Chinese Inertial Technology,2012,20(6):631-634.
[30]谢波,秦永元,万彦辉,等.捷联惯导系统尺寸效应分析与补偿[J].中国惯性技术学报,2012,20(4):414-420.
XIE Bo,QIN Yong-yuan,WAN Yan-hui,et al.Analysis and compensation for size effect of strapdown inertial navigation system[J].Journal of Chinese Inertial Technology,2012,20(4):414-420.
[31]Chapsky V,Portman V T,Sandler B Z.Single-mass 6-DOF isotropic accelerometer with segmented PSD sensors[J].Sensors and Actuators,A:Physical,2007,135(2):558-569.
[32]Wan Zhen,Cui Feng,Zhang Weiping,et al.Design of proof mass and system-level simulation of a micromachined electrostatically suspended accelerometer[C].2011 International Conference on Advanced Design and Manufacturing Engineering,Guangzhou,China.2011:1631-1634.
[33]万镇.六轴静电悬浮微加速度计的设计及系统级仿真[D].上海:上海交通大学,2012.
[34]Qin Yuan,Zhang Wei-ping,Liu Wu,et al.Design of DSP-based control systems for six-axis electrostatically suspended micro-machined accelerometer[C].2011 International Conference on System Science,Engineering Design and Manufacturing Informatization,Guiyang,China.2011:341-344.
[35]李雨桐,王玉新.力作用下并联机构奇异点动态稳定性[J].机械工程学报,2013,49(3):31-35.
LI Yu-tong,WANG Yu-xin.Dynamic stability of the parallel manipulator at turning point singularities under applied loads and gravities[J].Journal of Mechanical Engineering,2013,49(3):31-35.
[36]张英,廖启征,魏世民.一般6-4台体型并联机构位置正解分析[J].机械工程学报,2012,48(9):26-32.
ZHANG Ying,LIAO Qi-zheng,WEI Shi-min.Forward displacement analysis of a general 6-4 in-parallel platform[J].Journal of Mechanical Engineering,2012,48(9):26-32.
[37]胡俊峰,张宪民,徐贵阳.基于模型预测控制的高速柔性并联机构振动控制[J].振动与冲击,2014,33(1):24-32.
HU Jun-feng,ZHANG Xian-min,XU Gui-yang.Vibration control of a high-speed flexible parallel mechanism based on model predictive control[J].Journal of Vibration and Shock,2014,33(1):24-32.
[38]Trenholm S,Johnson K,Li X,et al.Parallel mechanisms encode direction in the retina[J].Neuron,2013,77(1):204-208.
[39]Cao Yi,Wu Mei-ping,Zhou Hui.Position-singularity characterization of a special class of the Stewart parallel mechanisms[J].International Journal of Robotics & Automation,2013,28(1):57-64.
[40]Choi K B,Lee J J,Kim G H,et al.A compliant parallel mechanism with flexure-based joint chains for two translations[J].International Journal of Precision Engineering and Manufacturing,2012,13(9):1625-1632.
[41]尤晶晶.基于6-SPS并联机构的压电式六维加速度传感器的研究[D].南京:南京航空航天大学,2009.
[42]裴旭,李远玥,侯振兴.大行程转动柔性铰链性能测试及实验[J].光学 精密工程,2013,21(4):927-933.
PEI Xu,LI Yuan-yue,HOU Zhen-xing.Performance measurement and experiment for rotational flexural joint with large stroke [J].Optics and Precision Engineering,2013,21(4):927-933.
[43]Wang hong-jin,Meng qing-feng.Analytical modeling and experimental verification of vibration-based piezoelectric bimorph beam with a tip-mass for power harvesting[J].Mechanical Systems and Signal Processing,2013,36(1):193-209.
[44]尤晶晶,李成刚,吴洪涛.基于四面体构型的冗余并联机构的运动学分析[J].中国机械工程,2013,24(8):1097-1102.
YOU Jing-jing,LI Cheng-gang,WU Hong-tao.Kinematics analysis of redundant parallel mechanism based on tetrahedral configuration[J].China Mechanical Engineering,2013,24(8):1097-1102.
[45]尤晶晶,李成刚,吴洪涛.基于并联机构的六维加速度传感器的方案设计及建模研究[J].振动工程学报,2012,25(6):658-666.
YOU Jing-jing,LI Cheng-gang,WU Hong-tao.Study on the scheme design and modeling of six-axis accelerometer based on parallel mechanism[J].Journal of Vibration Engineering,2012,25(6):658-666.
[46]尤晶晶,李成刚,吴洪涛.并联式六维加速度传感器的哈密顿动力学研究[J].机械工程学报,2012,48(15):9-17.
YOU Jing-jing,LI Cheng-gang,WU Hong-tao.Research on Hamiltonian dynamics of parallel type six-axis accelerometer[J].Journal of Mechanical Engineering,2012,48(15):9-17.
[47]尤晶晶,李成刚,吴洪涛,等.六维加速度传感器的两类解耦算法及其对比研究[J].中国机械工程,2013,24(21):2938-2943.
YOU Jing-jing,LI Cheng-gang,WU Hong-tao,et al.Study and comparison of two decoupling algorithms for six-axis accelerometer[J].China Mechanical Engineering,2013,24(21):2938-2943.
[48]尤晶晶,李成刚,吴洪涛.六维加速度传感器的性能建模及结构优化[J].南京航空航天大学学报,2013,45(3):380-389.
YOU Jing-jing,LI Cheng-gang,WU Hong-tao.Performance modeling and structure optimizing of six-axis accelerometer[J].Journal of Nanjing University of Aeronautics and Astronautics,2013,45(3):380-389.
[49]尤晶晶,李成刚,吴洪涛.并联式六维加速度传感器的参数辨识[J].光学 精密工程,2013,21(10):155-166.
YOU Jing-jing,LI Cheng-gang,WU Hong-tao.Parameter identification of parallel type six-axis accelerometer[J].Optics and Precision Engineering,2013,21(10):155-166.
[50]苏永生,王永生,段向阳.基于多传感器数据融合的喷水推进泵空化分类识别[J].振动与冲击,2012,31(18):93-96.
SU Yong-sheng,WANG Yong-sheng,DUAN Xiang-yang.Classification of cavitation in a waterjet pump based on multi-sensor data fusion[J].Journal of Vibration and Shock,2012,31(18):93-96.
[51]Seo W,Hwang S,Park J,et al.Precise outdoor localization with a GPS-INS integration system [J].Robotica,2013,31(3):371-379.
[52]Einicke G,Falco G,Malos J.Bounded constrained filtering for GPS/INS integration[J].IEEE Transactions on Automatic Control,2013,58(1):125-133.
[53]戎保,芮筱亭,王国平,等.多体系统动力学研究进展[J].振动与冲击,2011,30(7):178-187.
RONG Bao,RUI Xiao-ting,WANG Guo-ping,et al.Developments of studies on multibody system dynamics[J].Journal of Vibration and Shock,2011,30(7):178-187.
[54]刘成保,陈玉福.长波近似水波问题中哈密顿系统的辛几何算法[J].中国科学院大学学报,2013,30(5):577-584.
LIU Cheng-bao,CHEN Yu-fu.Symplectic algorithm for solving hamiltonian systems of the water-wave problem under long-wave approximation[J].Journal of University of Chinese Academy of Sciences,2013,30(5):577-584.
[55]涂运冲,谢军龙,王嘉冰,等.辛和非辛算法求解薛定谔方程误差分析[J].工程热物理学报,2014,35(2):266-269.
TU Yun-chong,XIE Jun-long,WANG Jia-bing,et al.Error analysis of symplectic and nonsymplectic algorithm for solving schrodinger equation[J].Journal of Engineering Thermophysics,2014,35(2):266-269.

