小型乘用车自动离合器研制
2016-01-12田春林,邱占浩,王晓军
小型乘用车自动离合器研制
田春林1,邱占浩1,王晓军2
(1.长春理工大学机电工程学院,长春130022;2.东北工业集团技术中心, 长春130000)
摘要:针对自动变速器成本高、油耗高、维修复杂,而手动变速器操作复杂,驾驶员易疲劳的问题,研发了自动离合器系统。用电动机构取代离合器踏板功能,而保留其它原有操纵机构。把电动机旋转运动转化为控制离合器总泵的直线运动,通过离合器工作泵间接控制离合器分离叉,从而控制离合器分离、接合。自动离合器系统将自动挡和手动挡相结合,不但可以自动变速,又保留变速杆。自动离合器系统有成本低、维护方便、富有驾驶乐趣等特点。
关键词:自动离合器;小型乘用车;电控机构
收稿日期:2014-07-08
作者简介:田春林(1972-),男,吉林长春人.副研究员,博士,主要从事精密加工及检测方面技术方面研究。
中图分类号:U463.211文献标志码:A
自动离合器系统(Automatic Clutch System)就是取消了离合器踏板,改由电控单元控制,通过手动换挡实现离合器自动接合与分离的一种智能离合器控制系统。驾驶员在换挡时,可直接操纵变速杆进行换挡,电控单元ECU控制离合器,令其自动完成分离和结合动作,无须驾驶员踩踏离合器以及对离合器踏板和油门踏板进行配合操纵。ACS能够有效的改善换挡的操纵性能,减轻驾驶员的疲劳强度,同时保留了手动驾驶的乐趣,给人一种全新的驾驶感受,由于其成本低廉,具有广泛的发展前景。
1自动离合器系统的基本组成和工作原理
本文研制的自动离合器系统(ACS)主要由各种传感器、电子控制单元(ECU)、离合器操纵机构、线束、显示警报单元等部分组成。
电控单元ECU通过对各个传感器传送而来的信号进行分析处理,在已设定好的控制策略控制下,对离合器操纵机构发出指令,使汽车在进行起步、换档、刹车等车况时,离合器能自动的接合和分离。图1为ACS原理框图。

图1 自动离合器系统原理框图
2自动离合器电子控制单元
电控单元硬件结构主要由微控制器、脉冲量、模拟量和开关量输入电路、电机驱动电路、显示驱动电路、通讯接口和调试接口等组成。电控单元ECU对各个传感器输送而来的信号进行分析,判断出驾驶员的操纵意图,根据离合器控制策略对离合器驱动机构进行控制。自动离合器系统电控单元硬件结构如图2所示。
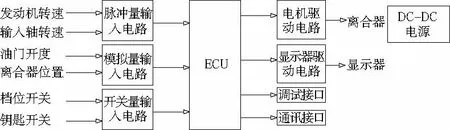
图2 自动离合器系统电控单元硬件结构
2.1 微控制器选择
微控制器是自动离合器控制系统的核心部件,其应具有以下性能: 能够在各种车况下行驶的车辆上具备良好的稳定性,具有较大的程序存储空间,支持串口通信,还应有调试、通讯功能。
本文研制的电控系统选择Freescale推出的MC9S12XS128单片机,MC9S12XS128由 16 位中央处理单元(CPU12X)、128KB 程序 Flash(P-lash)、8KB RAM、8KB 数据 Flash(D-lash)组成片内存储器具有速度快、成本低、功耗低和功能强等特点。
2.2 DC-DC电源转换部分
电源为系统的稳定工作提供安全保障。车上提供的DC 12V电源不稳定,所以用电源转换部分提供电源的降压和稳定。MC9S12XS128单片机所需要的电源为DC 5V。12V到5V的电源转换芯片采用AS1117。
2.3 传感器及信号采集
2.3.1 脉冲量输入信号
脉冲量输入信号主要有发动机转速信号、变速器输入、输出轴信号。其中发动机转速信号可由发动机曲轴位置传感器获取,由发动机ECU获得,它是输出为12V的方波频率信号。变速器输入轴和输出轴转速传感器采用的是磁电式传感器。输入轴转速信号为正弦信号,输出轴转速信号为幅值为12V的方波信号。
2.3.2 模拟量输入信号
模拟量输入信号主要包括节气门开度和离合器位置信号等。节气门位置信号可通过汽车上的节气门位置传感器获得。离合器位置信号采用的是一种角度传感器获得,通过测量蜗轮转过的角度就可算出离合器的接合位置。
2.3.3 开关量输入信号
开关量输入信号包括点火开关、档位信号、手制动、脚制动开关等。档位传感器采用非接触式霍尔元件传感器,可识别变速杆的位置。换档力传感器,也采用非接触式霍尔元件设计。将其装在换挡拉杆上。换挡时换档拉杆内的磁铁柱发出磁力线,识别换档杆的拉力和推力。脚制动开关,手制动开关和点火开关均使用车上的相关开关,当脚制动时,输出信号为12V,否则为0,当手制动时,输出信号为0V,否则为12V,点火开关为ON位时,输出信号为12V,否则为0。
3自动离合器驱动机构
3.1 离合器操纵机构设计
驾驶员用来控制离合器分离与接合被称为离合器操纵机构。离合器的工作性能是否稳定取决于离合器操纵机构能否与离合器匹配。
本文研制的自动离合器系统将电动机构替代离合器踏板而其它机构保持不变,图3为操纵机构设计原理图。图4为蜗轮蜗杆示意图。

图3 操纵机构设计原理图

图4 蜗轮蜗杆机构示意图
3.2 驱动形式的选择
蜗轮蜗是常用来传递交错轴之间运动和动力的机构。蜗杆传动特点是结构紧凑,传动比大,传动平稳无噪音,主要具有自锁性,即蜗杆只能带动蜗轮传动,而蜗轮不能带动蜗杆转动。虽然蜗杆传动效率低,但是它完全满足自动离合器机构的结构紧凑、安装方便、传动平稳、机构自锁等特点。润滑对蜗杆传动至关重要,若润滑不良,则效率显著降低,而且会发生早期胶合或磨损。本系统选用常见的阿基米德圆柱蜗杆(ZA型),传动比取69。
3.3 电动机的选取
采用电机驱动式自动离合器控制系统,具有体积小、构造简单、高精度、成本低等优点[1-2]。
为了满足离合器自动操作的要求,电机要满足以下条件[3]:
1)可以正反转:以保证离合器的快速分离和平稳结合。
2)转速范围:由于离合器的有快速分离、快速接合、缓慢接合等几个阶段,电机应能够在一定转速范围内进行快速加、减速。
3)功率、控制精度要能满足平稳接合的要求。
4)电机的耐高低温性和抗振性要满足汽车行驶条件。
根据以上要求,选择永磁直流电机,短时工作制。短时工作制的工作特点是工作时间较短而停歇时间较长,充分利用电机的过载能力。本系统采用电压为 12V,额定功率为120W的永磁直流电机。
3.4 辅助助力机构
为了促使离合器快速分离,克服电动机启动时输出转矩不足的缺陷,驱动机构一般都要设计有辅助助力机构[4]。
本系统采用扭力弹簧作为助力结构,采用电动控制与液压驱动相结合的形式驱动离合器的接合与分离。当控制离合器分离时,预压紧的扭力弹簧起正向助力作用,可以减轻电机负载,推杆将总泵的液压油推出,沿着油管进入分泵内,分泵推杆带动分离叉拨将分离轴承压下,使得离合器分离。当离合器需要接合时,此时扭力弹簧被压缩,离合器在克服扭力弹簧作用下慢慢接合,不但延缓了离合器的接合时间,减少冲击功,也为下一次离合器分离助力储存能量。
扭力弹簧的设计说明[5]:
1)为提高补偿机构的性能,选取离合器最大负荷转矩的一半为离合器负荷期望补偿转矩。不仅在离合器分离时负荷将减小一半,同时又可防止反向补偿力矩过大。
2)扭力弹簧的最大输出扭矩取为期望补偿扭矩的 1.2~1.3倍,这是因为理论特性曲线往往与实际有较大出入。
3) 要求弹簧的工作刚度小,就是扭力弹簧的补偿力矩在工作范围内变化小。
4)自动离合器驱动机构接合位置控制策略制定
在自动离合器控制过程中,对电机运行位置的控制以及对电机转速的控制至关重要,只有这样才能很好的控制离合器的接合与分离过程。离合器结合的控制目标是在降低冲击度的同时尽量减少结合过程的滑摩功[6-7]。

图5 模糊PID控制原理图
自动离合器系统具有非线性、系统参数变化大、控制过程短和响应滞后等特点,由于其要求控制精度高,用常规的 PID 控制算法不能达到。与PID控制算法相对的智能控制算法或过于复杂,或难以实现。鉴于此,将两种算法结合起来是十分有意义的。模糊 PID 控制是智能控制算法中的一种模糊控制和 PID 控制的结合,一方面模糊控制因其具有非线性应用方便、无需精确建立被控对象数学模型的特点;另一方面又保留了 PID 控制结构简单、鲁棒性强等优点[8]。因此,本系统对离合器液压执行机构的控制器将采用模糊 PID 控制算法来设计。
模糊控制器的输入参数是误差 e和误差变化率 ec,输出参数是 PID 控制器的三个参数 ,分别为微分参数kd、积分参数ki和比例参数kp。PID 控制的三个参数由模糊控制器根据模糊规则在线整定。典型的模糊PID控制器原理图如图5所示。
5结语
自动离合器系统可以看做是自动挡与手动挡的结合,不仅具有手动挡的成本低,维护简易,且可以不需要驾驶员脚踏离合器踏板,自动实现离合器接合与分离。本文主要论述了自动离合器系统设计开发,介绍了自动离合器系统的组成及工作原理,设计自动离合器系统的硬件结构,奠定小型乘用车自动离合器系统开发基础。
参考文献:
[1]李志伟,李翠芬,杜志岐.电机驱动式 AMT 离合器接合控制研究[J].车辆与动力技术,2006(3): 13-15.
[2]刘锦升.自动离合器控制装置:中国,CN96239207.3[P]. 1999-02-10.
[3]李恩光.机电伺服控制技术[M].上海:东华大学出版社,2003
[4]大连锦华汽车电子有限公司.电控电动机械式自动变速装置:中国,CN99206123.7[P]. 2002-02-02.
[5]谢先平. 汽车自动离合器接合过程控制策略研究[D].哈尔滨:哈尔滨理工大学,2008
[6]Tang Xiaqing, Hou Chaozhen, Chen Yunchuang. Study of Controlling Clutch Engagement for AMT Based on Fuzzy Logic[J]. Journal of Beijing Institute of Technology, 2002, 11(1): 45~49.
[7]Serrarens A, Dassen M, Steinbuch M. Simulation and control of an automotivedry clutch[C]. Proceedings of the 2004 American Control Conference, 2004:4078-4083.
[8]Hou Changjiu, Ruan Da. Fuzzy control rules extraction from perception-based information using computing with words[J]. Information Sciences, 2002,142(4): 275~29.
责任编辑:吴旭云
Research and Development of Automatic Clutch System of Small Passenger Car
TIAN Chunlin1, QIU Zhanhao1, WANG Xiaojun2
(1. School of Mechatronical Engineering, Changchun University of Science and Technology, Changchun 130022, China; 2.Technology Center,Northeast Industries Group Co.,Ltd, Changchun 130000,China)
Abstract:In view of the problems of the high cost, high fuel consumption and complex maintenance of the automatic transmission as well as the complicated operation of manual transmission and the easy fatigue of drivers, an automatic clutch system is researched and developed, in which the clutch pedal function is replaced by electric mechanism and the other original steering mechanisms are kept. The rotary motion of motor is converted to the linear movement to control the clutch master and the clutch release fork is controlled indirectly by the clutch pump so as to control the clutch’s separation and connection. The automatic clutch system, with the combination of automatic transmission and manual transmission, can realize the automatic transmission function and keep the gear lever. Automatic clutch system has the features of low cost and convenient maintenance, having driving pleasure.
Keywords:automatic clutch; small passenger car; electric control mechanism
