水下采油树液压系统高压回油压力分析
2016-01-10马恬然叶天源刘海军
王 鑫,左 信,马恬然,叶天源,王 锋,刘海军
[1.中国石油大学(北京)地球物理与信息工程学院, 北京 102249;2.中国石油大学(北京)海洋油气研究中心, 北京 102249;3.重庆前卫海洋石油工程设备有限公司, 重庆 401121;4.重庆前卫科技集团,重庆 401121]
水下采油树液压系统高压回油压力分析
王 鑫1,2,左 信1,2,马恬然1,2,叶天源3,王 锋4,刘海军3
[1.中国石油大学(北京)地球物理与信息工程学院, 北京 102249;2.中国石油大学(北京)海洋油气研究中心, 北京 102249;3.重庆前卫海洋石油工程设备有限公司, 重庆 401121;4.重庆前卫科技集团,重庆 401121]
水下液压执行机构是海洋油气生产过程中的动力部件,该机构由水下液压系统控制。液压系统的设计影响水下阀门及执行机构的开启和关闭。针对水下液压系统的组成及原理进行分析,通过对水下控制模块(SCM)内部液压原理的计算,得出水下液压系统高压回油过程中的压力变化规律,建立了水深及单向阀的水下液压系统回油管线压力模型,并且采用SimulationX软件进行动态仿真。通过分析和比较仿真结果,从理论上验证了该控制系统的正确性及仿真的可行性,为研究深水液压控制系统提供了参考依据。
水下生产系统;水下液压系统;高压回油;动态仿真;SimulationX软件
0 引 言
当前,国外在深水开发方面进展很快,已经能钻探水下3 000多米并开采水下2 600多米的海上油气[1]。我国深水油气资源储量较大,但由于受国外深水开发的技术封锁,国内在深水开发方面进展缓慢,目前尚未发现有关于水下油气生产设施控制方面的文献报道。随着技术手段的提高,近年来我国油气勘探活动不断增加,而且勘探活动多数集中于深水区域[2-3],并且该技术是与国外大公司合作开发完成的,没有自己的知识产权,也没有掌握水下生产系统的核心技术[4]。所以加快国内采油树控制技术的研究刻不容缓。
随着海洋石油工业技术的发展和海上油田水深的增加,水下生产系统越来越受到世界各国的重视,并被纳入世界各大石油公司重要发展战略。同时,随着水深的增加和开采难度的加大,水下生产控制系统也经历了由全液压控制到复合电液控制方式的转变。
水下采油树控制系统由电力传输、通信系统和液压传输系统三部分组成,其中水下采油树控制系统液压执行机构分为低压执行机构和高压执行机构两类,因此水下采油树液压也分为高/低压两条供油管线,水下控制模块(SCM)接受来自平台上液压动力单元(HPU)的高/低压控制液,经电液换向阀控制其导通与关闭,进而控制执行机构动作[5]。
液压系统是驱动水下执行机构动作的基础,其设计的安全性及稳定性关系到水下生产系统的安全运行。在深水、长距离深海油气生产过程中,由于成本等原因,执行机构动作过程中产生的回油会直接排海,但水下油气生产过程中对控制液的清洁度有很高要求,因此需要在控制液排海端设计单向阀以避免控制液及海水回流到液压系统内部。另外单向阀的设计会对回油管线的回油压力造成一定影响,所以在系统设计的初始阶段,应结合液压系统的控制水深、执行机构参数等对液压系统进行计算与分析。
本文将对水下液压系统的组成和原理进行分析,结合控制水深、液压元器件参数、执行机构参数等,对SCM液压系统回油管线在回油过程中的最大压力进行计算,并运用SimulationX软件进行仿真分析验证。
1 水下生产液压系统组成
复合电液控制系统由控制信号控制水下液压执行机构及阀门动作,水下采油树复合电液控制系统主要包括:(1)平台控制装置,有液压泵、蓄能器、液压调节器和监控系统;(2)水下控制装置,有电磁阀、蓄能器和电子模块;(3)软管束,信号电缆或光纤、液压管线、电力供给电缆集中于一根脐带缆中。
复合电液控制工作原理如下:平台控制系统将操作命令经过平台上的处理机转为电信号,经一对电缆线把电信号传到安装于水下采油树上的水下控制模块,由它进行信号解码,将电码信号转变为驱动电磁阀的控制信号而使电磁阀动作,进而控制水下采油树的阀门。复合电液控制系统的优点为反应时间短具有远程测控功能和远程控制功能(目前国内荔湾3-1气田控制距离为75 km),水下采油过程中的温度、压力等参数可以通过光纤或电力载波通信传输到水上。其缺点为水下控制系统结构复杂,安装维护成本高。
水下采油树的工艺流程依靠采油树体上的液压执行机构动作控制。图1为其液压控制流程框图。

图1 液压控制流程框图Fig.1 Hydraulic control flow chart
1.1 液压动力单元
液压动力单元是一种设计用于供应可生物降解的水基液压油或矿物液压油的装置[6]。它为液压系统提供动力。典型的HPU由一个供油箱、一个回油箱、一个用于各个压力系统的泵以及一个用来注油和冲洗的循环泵组成。循环泵有一个高压油源和一个低压油源,分别连接脐带缆中的高低压供油管。两个液压控制系统压力分别为用于采油树阀门的低压(LP)和用于地面控制井下安全阀(SCSSV)的高压(HP)。HPU主要由泵和蓄能器组成,其中蓄能器由恒流泵控制,泵由储液罐输出流体来为蓄能器充压。如果流体由调节器流入管线,那么流体来自蓄能器;如果流体从管线流回调节器,则它再返回至储液罐[7]。HPU工作原理如图2所示。

图2 HPU工作原理Fig.2 HPU working principle
1.2 脐带缆
脐带缆是连接平台或浮式生产系统与海底油井的控制管缆,如图3所示。由电缆、光缆、软管、管道组成,缆外部具有外护套和起保护作用的铠装[8]。缆芯内所有空隙均填满填充物,以提高各单元的稳定性以及管单元抗内压和抗外压的能力;缆芯、铠装和护套之间分别用包带隔离,包带具有稳定结构、减少磨损和减少损伤等功能(见图3)。脐带缆的主要功能包括化学药剂(如甲醇、乙醇)的注入、水压的控制、信号的控制、电力的控制等[9]。由于脐带缆的直径较小,水深的增加对其铺设安装技术及装备提出了更高的要求,尤其在深海条件下要求更加严格,而目前深水安装技术是国内外海洋工程界研究的热点之一[8]。Dieumegard等[10]对深水脐带缆的安装技术进行了探讨,并对影响深水脐带缆安装的限制因素进行了分析。Clausing等[11]介绍了深水脐带缆的一种新的安装方法,该方法可以很好地减少触地点的影响。de Sousa等[12]通过建立三维有限元模型,研究了受安装载荷作用的柔性管的局部力学特性。

图3 脐带缆结构示意图Fig.3 Umbilical cable structure diagram
脐带缆的设计对于整个系统的特性和使用是十分重要的,因此液压软管建模的准确性也同样重要[13]。在处理管线和软管方面,考虑电分析可对液压系统产生一定帮助。如图4所示,将欧姆定律应用于液压方面,管线压力可以看作电压(其中,Ps为供应端,Pd为接收端),液体流速(Q)可以看作电流,液压供应软管可以看作无限电阻(R)、电容(C)和电感(L)[14]。液压软管的等效电路如图5所示。

图4 液压软管的电分析方式Fig.4 Electro-analysis of the hydraulic hose

图5 液压软管的等效电路Fig.5 Equivalent circuit of the hydraulic hose
假设软管中的流体是层流的,液阻(R)的计算公式为[15]

(1)
式中:μ为控制液的黏滞系数;l为软管长度;d为液压管线管径。
构建全程网格化监管、食品药品可追溯、技术支撑、社会共治“四个体系”。昆明市局率先在全省构建了市县食品药品稽查体系,以政府购买服务方式,配备工作人员4600多名,形成市县乡三级监管机构、市县乡村四级监管网络。建立了生产管理、入市备案、进销记录等制度,加强初始管控,构建系统的溯源链条。此外,还建立了以市级检验机构为核心、县级检验机构为支撑、乡和市场快检室为基础的检测体系。开展立体式宣传,连续13年组织家庭小药箱清理暨用药安全宣传月活动。
液容(C)的计算公式为

(2)
式中:Beffect为软管有效体积弹性模量。
液感(L)的计算公式为

(3)
式中:ρ为流体密度。
如果忽略液感,则由基尔霍夫定律和欧姆定律可以得出:
Ps=Pd+QR,
(4)

(5)
使用分段成微元的管线建模方法也有助于分析系统模型[13]。
1.3 水下控制模块
水下控制模块安装在可回收的装置或壳体内,可以独立回收和安装,如图6所示。水下控制模块内部结构基本是标准化的。目前一个水下控制模块的控制功能最少为7个,最多为64个。因而一个水下控制模块可对一个或多个水下采油树及设备进行遥控,并对井筒、环空以及水下管汇进行操作和监控。根据需要,水下控制模块可以安装在采油树或水下管汇等处。
水下控制模块与上部电子控制系统之间通常采用主从通信,即以水面系统为主,水下控制为辅,兼容“发送/确认”和“需求/响应”功能。水下控制模块具有对温度、压力、流量等实施监控的功能。
1.4 采油树上的执行机构
依据水下采油树开关井及生产操作工艺,对水下采油树控制系统功能进行分析,其中,水下采油树控制模块液压油控制的阀门和执行机构如图7所示。

图6 水下采油树控制模块及基座Fig.6 Hydraulic control module and base of the subsea Christmas tree
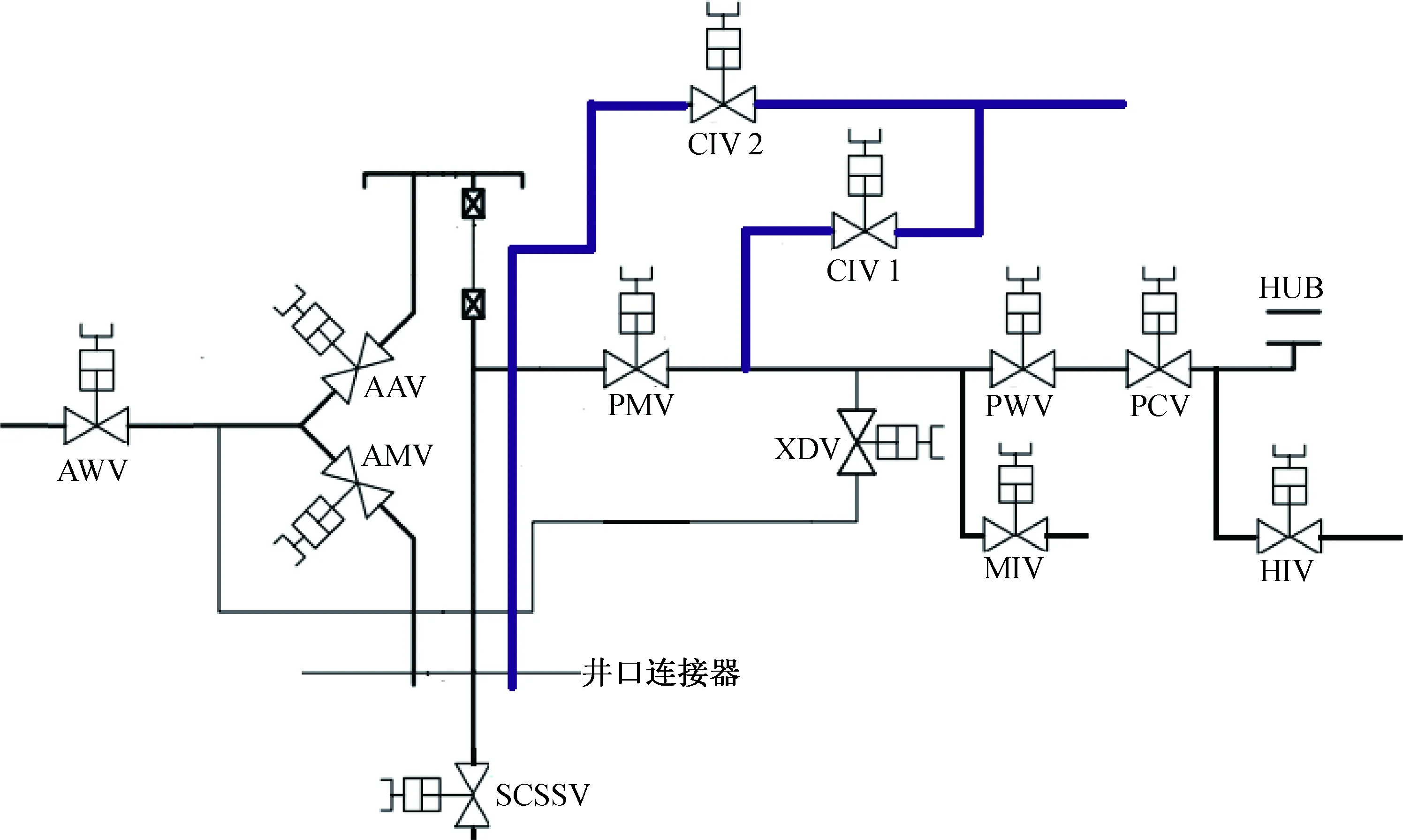
图7 水下采油树结构图Fig.7 Structure of the subsea Christmas tree
SCM接收来自平台上主控站(MCS)的信号,控制图7中的系统驱动水上控制水下安全阀(SCSSV)、生产控制阀(PMV)、生产翼阀(PWV)、环空控制阀(AMV)、环空翼阀(AWV)、生产调节阀(PCV)以及化学试剂注入阀(CIV 1,CIV 2)、环空翼阀(AAV)、甲醇(乙二醇)注入阀(MIV)、水合物抑制剂阀(HIV)、转换阀(XOV)等动作,通过阀门的动作控制油气生产,油气管路中流量和压力的变化由SCM通过脐带缆传输到平台主控站。
2 水下生产控制液压系统分析
以南海某油田为例进行分析,其水深为1 500 m。SCM内液压系统有供油管线和回油管线,回油管线经过补偿器及单向阀直接连通海水。
2.1 水下生产液压系统原理图
SCM液压系统原理图如图8所示。其中,HC1/2与HC3/4为高压供油管线。图中T1出排海口压力为Psea,同时,补偿器一端暴露,与海水直接接触。本项目水深为1 500 m,将Psea定义为15 MPa,以此平衡海水压力;同时,在以往项目设计中,阀门和执行机构弹簧腔一侧有补偿装置,以补偿压力与海水的压力平衡。

图8 SCM液压回路高压工作原理Fig.8 High pressure working principle of SCM hydraulic circuits
2.2 水下生产液压系统回油分析
综合以上设计,回油路管线绝对压力最终会稳定在Psea+2.0 MPa,即17 MPa左右,同时,由于液压系统的震荡以及泄压过程中使一部分液体流出的瞬间释压,因此会导致最终的绝对压力略小于17 MPa。
SCM高压回油支路排放支路需安装补偿器以平衡海水压力;排放口压力与液压执行机构元件参数(弹簧弹性系数、预紧力、关闭腔面积、闸杆行程等参数)有关。
3 基于SimulationX的水下生产液压系统仿真分析
3.1 SimulationX软件介绍
SimulationX是一款在统一的平台上实现多学科领域系统工程建模和仿真的软件,包括机械、液压、气动、热、电和磁等领域,可用于机电系统设计、机器人及控制系统优化、发动机/车辆冷却系统以及电磁驱动机构的设计等。根据不同行业的特点,用户可利用SimulationX软件的type designer工具自定义标准元件,对元件库的标准元件进行扩展,对已有模型进行封装以及对所建模型加密。同时,自定义的内容还具有良好的开放性、继承性和保密性[16-17]。
3.2 仿真分析
如图9所示,运用SimulationX软件建立仿真模型并分析。
针对仿真回路图,各元件参数设计如下。
HPU泵:高82.74 MPa,低68.95 MPa;蓄能器预充压力:68.95 MPa;DCV阀:第5 s切换到状态1;第200 s切换到状态0;补偿器压力:15 MPa;单向阀:单向阀1压力20~30 kPa,单向阀2压力2.00 MPa;TANK:15 MPa(海水压力);水深:1 500 m;控制距离:30 km;液压管线管径:12.7 mm。
针对两种闸阀进行仿真分析,两种闸阀的相关参数如表1所示。
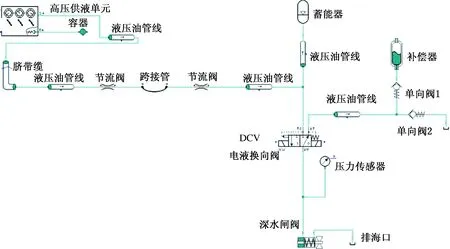
图9 高压回路仿真Fig.9 Hydraulic circuits simulation
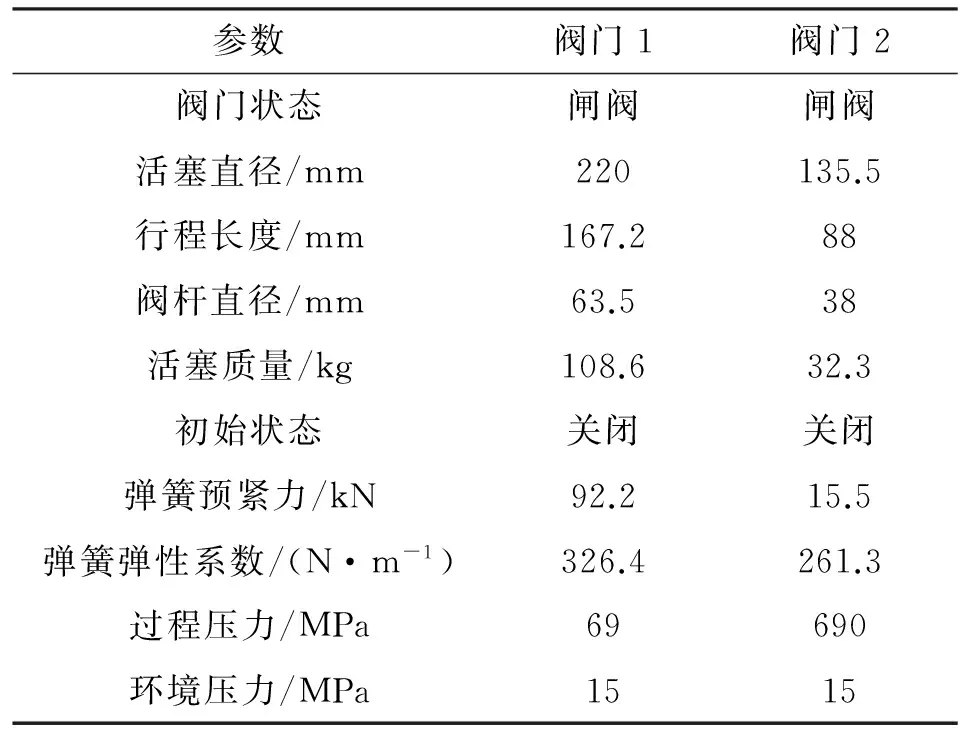
参数阀门1阀门2阀门状态闸阀闸阀活塞直径/mm220135.5行程长度/mm167.288阀杆直径/mm63.538活塞质量/kg108.632.3初始状态关闭关闭弹簧预紧力/kN92.215.5弹簧弹性系数/(N·m-1)326.4261.3过程压力/MPa69690环境压力/MPa1515
首先,针对阀门1的参数进行分析,将参数代入模型,得到如图10~13所示仿真结果。

图10 闸杆位移与回油管线压力曲线Fig.10 Curves of brake lever displacement and oil return pipeline pressure

图11 回油时刻前后压力变化Fig.11 Pressure changes before and after oil return time

图12 回油管线最大压力Fig.12 Maximum pressure of oil return pipeline

图13 回油状态平衡后压力Fig.13 Pressure after oil return equilibrium
由图10可以得到:我们所设计的液压系统及参数能使阀门1正常开启和关闭,开启和关闭时间均可满足水下生产系统的工艺要求。图11~12给出了在回油中液压震荡过程的压力变化,最大值为21.58 MPa,图13给出了回油压力稳定后回油管线的压力值为16.30 MPa,与2.1和2.2节分析相符。
然后,对阀门2参数代入仿真系统模型进行仿真分析,得到如图14和图15所示结果曲线。

图14 闸杆位移与回油管线压力曲线Fig.14 Curves of brake lever displacement and oil return pipeline pressure

图15 回油管线最大压力及震荡曲线Fig.15 Maximum pressure and oscillation curve of oil return pipeline
由图14可以得到:我们所设计的液压系统及参数能使阀门2正常开启和关闭,开启和关闭时间均可满足水下生产系统的工艺要求。回油压力稳定后回油管线的压力值为16.33 MPa,与2.1和2.2节分析相符,图15给出了在回油中液压震荡过程的压力变化,最大值为18.98 MPa。
4 结 语
由以上两种阀门的分析结果可以得出:不同的阀门和执行机构回油端最大压力并不相同。在仿真过程中,通过参数可以判断,回油端最大压力与阀门和执行机构弹簧弹性系数、闸板面积、闸杆位移、闸杆动作过程中摩擦力等有关;回油时刻的最终压力与液压原理设计有关,即单向阀压力及外部环境(海水深度)压力相关。经过图10~图15的对比可以得出,水下液压系统回油管线压力变化与水深及回油管线的单向阀压力有关。阀门参数对回油管线稳定后压力影响较小,对回油过程震荡最大压力的影响较大。
在实际选型中,结合采油树及井底的执行机构相关参数,结合设计水深(海水压力)进行分析综合得出,DCV阀回油端能承受的最大压力应考虑计算的最大压力再加上一定的裕量,以此对DCV阀选型提供依据。
本文首次对水下液压系统的组成进行介绍,对液压系统原理进行分析,采用SimulationX软件对水下液压系统在不同阀门参数下的回油压力震荡过程及稳定压力进行仿真分析,得出回油管线压力变化的规律,通过仿真分析,可以为液压系统工程设计提供一定参考,为水下采油树液压系统设计提供新的思路。
[1] 廖谟圣. 2000—2005年国外深水和超深水钻井采油平台简况与思考[J]. 中国海洋平台, 2006, 21(3): 1.
[2] 金春爽, 乔德武, 姜春艳.国内外深水区油气勘探新进展[J]. 海洋地质动态, 2003, 19(10): 20.
[3] 陈家庆. 海洋油气开发中的水下生产系统 (一) [J]. 石油机械, 2007, 35(5): 54.
[4] 余国核, 周美珍, 程寒生. 水下执行器液压控制仿真[J]. 机床与液压, 2010, 38(11): 116.
[5] 田红平, 叶道辉, 吴文, 等. 水下采油树液压系统: CN103511361A[P]. 2014.
[6] 《海洋石油深水工程手册》编委会. 海洋石油深水工程手册[M]. 北京: 石油工业出版社, 2011.
[7] 张宪阵,王晓敏,张凡,等. 水下生产系统液压动力单元液压系统原理研究[J]. 液压与气动,2014(10): 33.
[8] 王爱军,杨和振. 海底地形对脐带缆深水安装影响分析[J]. 海洋技术, 2010, 29(3): 59.
[9] Altamiranda E, Colina E. Intelligent subsea control[J]. Computing & Control Engineering, 2007, 18(4): 40.
[10] Dieumegard C, Fellows P. Installation of metallic tube umbilicals in 3,000 meters water[C]. OTC, 2003: 15368.
[11] Clausing K M, Williams V T, Kika N. Umbilical transport & installation challenges[C]. OTC, 2004: 16704.
[12] de Sousa J R M, Ellwanger G B, Lima E C P, et al. Local mechanical behavior of flexible pipes subjected to installation loads[C]. OMAE, 2001: PIPE-4102.
[13] SimulationX.Simulation of subsea control systems[M/OL].http:∥www.simulationX.com.
[14] McCarthy P S, Knight P H. The dynamic response of thermoplastic hoses[J]. Underwater Technology the International Journal of the Society for Underwater, 1995, 21(3):13.
[15] S. G. O’Mahony. The dynamic performance of subsea hydraulic control systems[C]. Subsea International’89, 1989: SUT-AUTOE-v20-131.
[16] 刘宝生.SimulationX 多学科建模和仿真工具[J]. CAD/CAM与制造业信息化, 2009(9): 34.
[17] 王红军,陈佳鑫,邹湘军,等.SimulationX及硬件在环仿真在伺服压力机设计和研究中的应用[J].机械工程学报,2012, 48(6): 51.
StudyontheHighPressureOilReturnofSubseaChristmasTreeHydraulicControlSystem
WANG Xin1,2, ZUO Xin1,2, MA Tian-ran1,2, YE Tian-yuan3, WANG Feng4, LIU Hai-jun3
[1.CollegeofGeophysicsandInformationEngineering,ChinaUniversityofPetroleum(Beijing),Beijing102249,China;2.OffshoreOil&GasResearchCenter,ChinaUniversityofPetroleum(Beijing),Beijing102249,China;3.ChongqingQianweiOffshorePetroleumEngineering&EquipmentCo.,Ltd.,Chongqing401121,China;4.ChongqingQianweiScience&TechnologyGroup,Chongqing401121,China]
Subsea hydraulic actuator is the power unit in the hydraulic oil and gas production, which is controlled by the subsea hydraulic system. The subsea actuators and valves are influenced by the subsea hydraulic system. We introduce the hydraulic system and the subsea control module (SCM) hydraulic systems, model the return pressure in the high pressure return line, and use the SimulationX software to perform dynamic simulation. Analysis and comparative study on the simulation results verify the control system, as well as the feasibility of the simulation. This research can provide reference for the investigation of deepwater hydraulic control systems.
subsea production system; subsea hydraulic system; high pressure oil return; dynamic simulation; SimulationX software
2016-09-19
国家发展改革委员会2013年海洋工程装备研发及产业化专项之“水下采油树研发及产业化”(发改办高技﹝2013﹞1764号)
王鑫(1988—),男,博士研究生,主要从事海洋油气生产过程控制系统设计方面的研究。
TP271+.31
A
2095-7297(2016)05-0297-08
