基于AVL-DRIVE系统的AMT驾驶性能评价
2016-01-09王勐,崔伟
基于AVL-DRIVE系统的AMT驾驶性能评价
王勐崔伟
(陕西法士特汽车传动工程研究院,陕西710119)
摘要:基于AVL-DRIVE系统,在陕汽F3000牵引车上进行AMT系统驾驶性能的测试,并对测试结果进行评估分析,找出车辆在某些驾驶性能方面存在的不足,作为AMT车辆的后续改进方向。
关键词:AMT;AVL-DRIVE;驾驶性能;评估
中图分类号:U463.212+.31文献标志码:A
收稿日期:2015—07—03
AMT Driveability Evaluation Based on AVL-DRIVE System
Wang Meng, Cui Wei
Abstract:Based on AVL-DRIVE system, AMT system driveablity test has been carried out on F3000 tractor in Shanxi Automobile, and the test result has been evaluated and analyzed to find out defects of driveability as subsequent improvement direction of AMT automobile.
Key words:AMT; AVL-DRIVE; driveability; evaluation
AMT(Automated mechanical transmission)系统的开发需要大量道路试验来评价起步、加速、换挡等重要的驾驶性能,AVL-DRIVE系统在大量专业人员的经验基础上对商用车的特征性能进行客观分析与质量控制,通过各种不同的传感器采集数据和车辆参数,如加速度、发动机转速、车速、加速踏板位置、振动等,将这些参数通过中央处理单元发送给计算机,使用AVL-DRIVE软件进行分析,从而能够在一定程度上避免驾驶员对车辆驾驶性能的主观误判。
1AVL-DRIVE系统介绍
AVL-DRIVE系统是奥地利AVL公司开发的一款基于驾驶员感知的测量系统,能实时地评价车辆的驾驶性能。AVL-DRIVE可以匹配各种车型(如乘用车、商用车、拖拉机等)、不同载重等级的车辆(如轻载、重载等)、不同种类的变速器(如AMT、AT、CVT、DCT、MT等)、不同种类的发动机(如内燃机、混合动力系统、电动车等)。AVL系统从相关的传感器及CAN总线上获取多种反应驾驶性能的参数,如纵向加速度、发动机转速、车速、踏板位置和振动等,这些参数由DMU(DRIVE Main Unit)采集并发送至AVL-DRIVE软件,进行深入的处理和运算。
2AVL-DRIVE系统硬件连接
AVL-DRIVE所需的传感器分为X/Y/Z三轴加速度传感器、Z轴加速度传感器、振动传感器、电流传感器等。通过在驾驶员头枕后、驾驶员座椅下、驾驶室正中座椅下、前轴、方向盘、车载电源处上安装相应传感器来采集信号,并发送给DMU。

AVL-DRIVE系统硬件连接示意图如图1所示。

图1 系统硬件连接示意图
3AVL-DRIVE系统软件配置
AVL-DRIVE系统可以对变速箱档位、速比、风阻系数、轮胎半径等配置参数进行设置或标定。车辆基本设置如图2所示。
AVL-DRIVE还可通过CAN总线采集其他信号,如发动机转速、发动机油温、车速及发动机扭矩等。并且预留有传感器采集通道,可以根据需要自行扩展。系统信号通道配置如图3所示。
4测试及评估
将所需的传感器安装到车辆相应的位置,并将信号线连接主机,进行参数设置后就可以进行实车驾驶性能数据采集,测试过程如图4所示。
将测试数据保存后,可以脱机进行分析。系统会按照评价驾驶性能的若干指标进行打分,具体分数值含义为:1分—极差,2分—差,3分—较差,4分—稍差,5分—接受,6分—合格,7分—好,8分—很好,9分—极好,10分—完美。
某次道路测试结果评分图如图5所示,其中每一项驾驶性能还有各自的构成结构,比如换挡性能的构成有滑行换档、kick down换档等,不同的二级构成中又有不同的三级构成,比如kick down升降档指标由换挡延迟、换挡持续时间、振动、冲击等指标构成,这些指标对于kick down性能的影响也有各自的权数。每一个三级构成指标都有其激活条件,根据系统内部的公式,当某种参数的变化率超过指定值时,认为该项指标被激活,同时计算该项指标的分数。
使用网状图可以清晰的看出目前车辆在哪些方面的性能需要提升,由图6可以看出,目前车辆在起步及换挡性能方面需要提升。
点击Driveaway的二级构成,如图7。可以看到,在二级构成中,分数较低的是Engine speed drop和Clutch grabbing这两项指标。
如图8所示,点击Engine speed drop可以看到,当离合器到达结合点时,发动机转速下降较大。分析原因是由于离合器结合过快,导致离合器到达结合点、传递扭矩时,由于负载的增加过快,超出了发动机的相应能力,发动机转速出现较大波动,由此影响了起步的平稳性。

图2 设置车辆参数

图3 定义系统信号通道

图4 测试数据
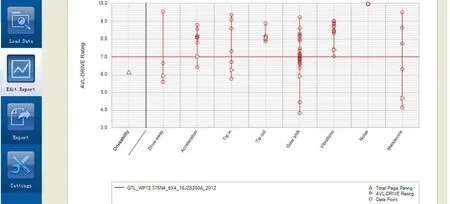
图5 换挡品质结果分析

图6 换挡品质结果分析

图7 换挡品质二级结果分析
点击Clutch grabbing后,如图9所示。可以看到,由于离合器结合过程不平稳,导致在离合器结合点,底盘纵向加速度出现高频波动。分析原因是由于离合器控制策略不完善,PID控制参数中,微分参数D设置过大,使得控制系统对于离合器位置的斜率变化过于敏感,如果通过一定的实验及标定过程,选择出合适的微分参数,可以提前抑制离合器位置变化,使其平稳准确地到达目标位置。
点击Gearshift的二级构成后,看到Jerks的得分较低,分析数据如图10所示,在Jerks的数据中,超过5个振幅。这是由于在换挡完成后,对发动机和离合器的扭矩控制不平稳,使得车辆没有获得平稳的加速性能。可以通过修改换挡完成后的发动机扭矩恢复策略和此时的离合器结合控制策略,使发动机的输出扭矩特性与车辆的负荷相匹配。

图8 测试数据分析

图9 测试数据分析

图10 测试数据分析
5结论
对于评分不高的项目,AVL-DRIVE系统可以进行进一步的分析,找出其原因,并为产品的改进指明方向。本系统可以将车辆驾驶性能主观评价与客观测量有机地结合起来,对驾驶性能进行综合评价,即定量评价车辆驾驶性能。该系统的关键在于由经验丰富的车辆工程师积累的大量主观评价资料而形成的数据库,以及多个单页事件按照不同权重计算出的整体评估结果。
同时,利用该系统可以进行AMT车辆的横向(竞争对手)和纵向(本系列车辆的改进)的对比分析、评价,并找出影响AMT车辆改进的突出因素,使开发的AMT系统在驾驶性能方面更具有竞争力。
参考文献
[1]余志生.汽车理论.北京:机械工业出版社,2008.
[2]Vehicle Application Layer,J1939-71.SAE International,2008.
编辑杜青泉