基于AD2S1210的永磁同步电机转子位置及速度检测电路设计
2016-01-07倪有鹏,胡清科
基于AD2S1210的永磁同步电机转子位置及速度检测电路设计
倪有鹏1,胡清科2
(1.枣庄科技职业学院 信息工程系, 山东 枣庄 277500; 2.兖矿国泰化工有限公司,山东 枣庄 277500 )
摘要:设计了一种用于检测电机转子位置及速度的电路方案,此方案基于AD2S1210解码芯片作为处理器搭建外围电路,采用上海赢双电机有限公司生产的YS52XFW9753旋转变压器作为传感器.通过AD2S1210给旋转变压器提供激励信号,并对其回馈信号进行解码,得到电机转子位置及速度的16位二进制码.采用DSP28335及永磁同步电机对设计方案进行了检测,测试结果表明该设计性能良好,可实时实现电机转子位置和速度的检测.
关键词:电机测速;转子位置检测;旋转变压器;AD2S1210
中图分类号:TM464 文献标志码:A
收稿日期:2014-10-29
作者简介:吴朋,男,1029396804@qq.com; 通信作者: 殷秀清,女, yinxq@163.com
文章编号:1672-6197(2015)05-0069-05
ThedetectioncircuitdesignofPMSMrotorpositionandspeedbasedonAD2S1210
NIYou-peng1,HUQing-ke2
(1.DepartmentofInformationEngineering,ZaozhuangVocationalCollegeofScienceandTechnology,Zaozhuang277500,China;
2.YankuangCathayPacificChemicalCompanyLimited,Zaozhuang277500,China)
Abstract:A circuit scheme for detecting rotors′ position and speed is proposed in this paper. Using decoder chip AD2S1210 as the processor,and YS52XFW9753 resolver, produced by Shanghai YingShuang Motor Ltd., as a sensor, a peripheral circuit is built. Incentives signals are provided to the resolver by AD2S1210, and its feedback signal is decoded to obtain the rotor position and speed of 16-bit binary code, which are detected by DSP28335 and resolver in this paper. The test results show that the design has a good performance, and can achieve real-time detection of the rotors′ position and speed.
Keywords:motorspeeddetection;rotorpositiondetection;resolver;AD2S1210
随着电动汽车的快速发展,永磁同步电机得到了广泛的使用,为满足其电机驱动系统的高精度、快速性、可靠性等方面的要求,通常采用矢量控制策略.因此,需要精准的电机电角度参数,而旋转变压器因其坚固耐用,并能提供高精度的位置信息而得到深入研究[1].旋转变压器的高精度位置信息,使得永磁同步电机能够较好实现矢量控制策略,其性能稳定,实时性好,速度响应快[2-3].旋转变压器接收模拟激励信号,根据轴脚的变化反馈不同幅值的正余弦信号,对通过AD2S1210解码芯片转换为16位二进制码的位置及速度信号(速度信号第一位为速度标示位,其数字信号为二进制补码)[4],再用数字信号处理器TMS320F28335进行数据处理,并通过串口通信SCI读取永磁同步电机真实位置及速度量[5].
本文采用的旋转变压器是上海赢双电机有限公司生产的YS52XFW9753,文中对其工作原理进行分析,并详细阐述AD2S1210的外围设计电路,同时对其工作时序进行分析,最后在永磁同步电机实验平台进行测试.
1旋转变压器的工作原理
旋转变压器可分为正余弦旋转变压器、 线性旋转变压器及比例式旋转变压器,而正余弦旋转变压器可分为经典旋变和可变磁阻式旋变两种[6].本文选用可变磁阻式正余弦旋转变压器,其原理如图1所示.
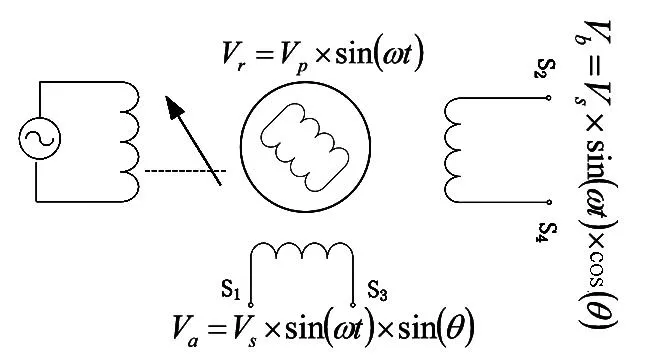
图1 旋转变压器原理图
图1中θ为轴角,sin(ωt)为激励特性,Vp为激励信号电压峰值,Vr为激励信号电压,Vs为旋转变压器回馈电压峰值,电压Va、Vb分别为感应绕组S1-S3、S2-S4上回馈电压.当旋转变压器在交流基准源激励下,定子次级绕组上的感应电压随转轴相对于定子位置(转轴与定子位置关系为轴角)的变化而变化.其交流激励信号为
(1)
正余弦旋转变压器的两个定子次级绕组电角度相差90° ,即为感应绕组S1-S3、S2-S4.同时可得出随轴角变化而产生的正余弦回馈电压.其电压为
(2)
本文采用的YS52XFW9753旋转变压器极对数为3,激磁电压7V(AC),激磁频率10kHz.
2AD2S1210外围电路设计
AD2S1210内部包括可编程的正弦波振荡器、错误检测电路、Ⅱ型闭环系统及数据总线接口等4个单元.其中AD2S1210解码芯片的可编程正弦波振荡器可产生峰-峰值为3.15×(1±0.27)V、频率为2 ~20kHz的基准源信号.此基准源信号通过滤波及功率放大电路向旋转变压器提供激励.其电路如图2所示.

图2 AD2S1210正弦波振荡器滤波及功放电路
AD2S1210的激励信号典型输出电压峰峰值为7.2V,正余弦输入端允许电压为3.15×(1±0.27)V,滤波电路参考电压典型值为2.47V,旋转变压器激励端电压典型值为7V.考虑到旋转变压器及外围电路损耗,故采用功放电路将其激励输出电压峰峰值设计为8V,以保证电路稳定.
本文采用的高频滤波器频域表达式为

(3)
功率放大电路频域表达式为
(4)
由式(3)、式(4)可知此滤波器及功放电路频域特性,其中滤波器带反向功能,故选定图2中设计参数如下:R1=R2=R7=R8=20kΩ,R4=R10=R6=R12=1kΩ,R5=R11=4.7kΩ,R3=R9=6.8kΩ,C1=C5=470pF,C2=C6=56pF,C3=C7=2.2nF,C4=C8=2.7nF.可得滤波电路参考电压、正弦波振荡器输出电压与参考电压差值及其功放电路增益的频域表达式为

(5)
可得如图3所示波特图.

图3 外围激励电路波特图
文中所选正弦波振荡器输出频率为10kHz,参考电压为恒定值,故图3所示波特图证实所选参数满足要求.
AD2S1210正余弦接收端外围电路如图4所示.由图4可知,旋转变压器正余弦输出端先经过增益运放电路,再经过滤波电路.故可得正余弦接收端外围电路增益运放频域表达式为
(6)
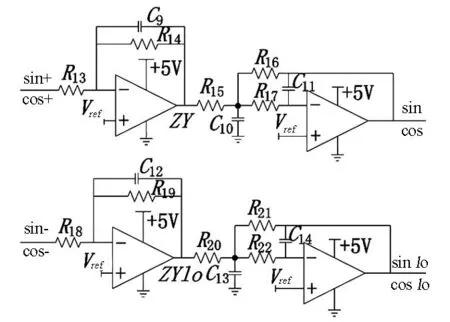
图4 AD2S1210正余弦接收端外围电路
滤波电路表达式为

(7)
由式(6)、式7可知正余弦接收端增益电路及滤波电路频域特性,且都带反向功能,故选定图4中设计参数如下:R13=R18=27kΩ,R14=R19=22kΩ,R15=R16=R20=R21=2kΩ,R17=R22=1.2kΩ,C9=C12=220pF,C10=C13=3.9nF,C11=C14=680pF.可得正余弦接收端频域增益、滤波电路参考电压及增益输出与参考电压差值频域表达式为
(8)
可得如图5所示波特图.
旋转变压器回馈电压为3.5×(1±0.1)V,正余弦接收端电压典型值为3.15V,调制频率为10kHz.故图5所示波特图证实所选参数满足要求.

图5 正余弦接收电路波特图
3AD2S1210位置速度解码原理
AD2S1210按TypeII跟踪闭环原理工作,连续跟踪旋转变压器轴角,无需外部转换和等待.
AD2S1210正弦波振荡器经过滤波及功放电路向旋转变压器提供励磁信号,旋转变压器产生两组承载位置速度信息的正余弦模拟信号经过增益及滤波电路输入sin/sinlo、cos/coslo,分别经过AD采样后送入乘法器.同时将位置积分器的输出数字角度φ也送入乘法器,可得
(9)
式(9)上式减去下式可得

(10)
利用内部产生的合成参考解调式(10)信号,可得
Ve=kVssin(θ-φ)
(11)
当角度误差θ-φ的值很小时,式(11)可近似为
(12)
AD2S1210采用一个相位敏感解调器、一些积分器和一个补偿滤波器形成一个闭环系统,以使式(12)误差信号归零,则实现φ等于旋转变压器轴角θ,从而跟踪恒定速度,而不存在固有误差.
电机因由多对极组成,故其转角分为电角度和机械角度.矢量控制策略中仅需精准的电角度,而旋转变压器解码芯片所得角度为电角度,可直接用于控制.其电角度绝对位置数据为
(13)
式中m为数据的二进制位数.
旋转变压器解码芯片根据数据的二进制位数决定其响应时间及精度,数据的位数越多则精度越高,同时其响应时间越慢.其精度为
(14)
而其二进制位数10°所需时间分别为:10位数0.6ms,12位数2.2ms,14位数6.5ms,16位数27.5ms.其具体位置、速度跟踪参数见表1.

表1 位置及速度检测参数表
4AD2S1210通信方式
AD2S1210位置速度信号由16位二进制码表示,可通过并口接口、时钟速率最高为25MHz的串行接口和增量式编码器仿真输出接口三种通信方式读取数据.其中串口通信方式所需引脚相对较少,但时序的要求较高,且不能很好地满足实时性.并口通信实时性好,但所需引脚较多.增量式编码器仿真通信与普通编码器通信并无差别但需占用DSP的资源.考虑到通信的实时性、稳定性,本文选取并口通信方式.
配置SOE引脚为高电平,设定为并口通信.配置RES0、RES1引脚为高电平,设定为16位二进制码.A0A1=00为输出位置数据,A0A1=01为输出速度数据,A0A1=11为配置模式.
当要从AD2S1210中读取数据时,SAMPLE引脚由高电平变为低电平,使其位置和速度积分器转移到相应的寄存器中,并更新故障寄存器.一小段时间后,片选引脚CS置底,数据传输到输出寄存器.A0A1引脚状态决定输出寄存器数据是位置量还是速度量.再读引脚RD置底,读取输出寄存器中的数据值,并且对输出缓冲器使能.当RD返回高电平,数据引脚也返回高阻态.
5测试结果
本文采用DSP28335控制以及永磁同步电机测试平台对设计电路进行检测,测试结果证实该设计性能良好,可实时实现电机转子位置和速度的检测.
本文所设计电路的旋转变压器激励频率为10kHz,电压峰峰值为8V,图6波形证实了其正确性.图7为正余弦接收端信号,其波形体现了旋转变压器工作原理及速度信号.图8为并口通信时序波形,体现了并口通信的时序实现.图9为增量式编码器仿真通信波形,其可直接输送给DSP29335,也可用来观察转子位置和速度信号.

图6 旋转变压器激励波形

图7 正余弦接收端信号

图8 并口通信时序波形图

图9 增量式编码器仿真通信波形
测试结果验证了设计电路的正确性,稳定性.此电路结构简单,可实现与电机的一体化,有利于更高精度电机控制,可极大推动电动汽车及机器人领域的发展.
参考文献:
[1] 姜燕平.旋转变压器原理及其应用[J].电气时代,2005(10):98-99.
[2] 陈慧,马跃强,王磊.旋转变压器位置检测在 EPS中的应用[J].传感器与微系统,2006,25(4):70-73.
[3] 曾重,骆光照,赵君.旋转变压器及转换器在电动轨道车辆中的应用[J].微特电机,2008(10):34-39.
[4] 张新磊,唐声权,刘丽艳,等.基于轴角转换芯片AD2S1210的圆感应同步器信号处理方法研究[J].宇航计测技术,2013,33(8):10-12.
[5] 梁家威,钟汉如.基于AD2S1210的转子位置转速检测方法研究[J].微电机,2013,46(5):48-50.
[6] 王安,赵林峰,陈奇志,等.基于 AD2S1210 的 EPS 电动机转子位置检测研究[J].北京汽车,2013(2):15-20.
(编辑:郝秀清)
