汽车半主动控制悬架的仿真研究❋
2015-12-31李耀刚龙海洋张文明
姜 钊,杨 晓,李耀刚,龙海洋,张文明
(1.河北联合大学 机械工程学院,河北 唐山 063009;2.北京科技大学 土木与环境工程学院,北京 100083)
0 引言
悬架是承载式车身与车轮之间全部传力连接装置的总称,其作用是把路面作用在车轮上的各种力和力矩传递到车架上用以吸收和缓和行驶中因路面不平度引起的车轮跳动而传给车架的冲击和振动[1-2]。汽车悬架系统对车辆的操纵稳定性、行驶平顺性和乘坐舒适性等衡量车辆性能的重要指标都有着决定性的作用,因此悬架的设计对车辆的总体性能有着很大的影响。
相对于被动悬架,半主动控制悬架能随时根据车辆行驶状态进行阻尼器阻尼系数的调节,使车辆行驶更加平顺,乘坐更加舒适,而消耗不大的能量,因此半主动控制悬架在未来应用广泛。通过ADAMS/Control模块与MATLAB的接口可实现基于汽车半主动控制悬架的联合仿真,此方法解决了半主动控制悬架数学模型建立的难题,减少了物理样机测试环节的试制和试验的次数,为车辆动力学系统的仿真与分析提供了一种有效方法[3]。
1 悬架系统模型的建立
1.1 悬架多体动力学模型的建立
利用ADAMS/View建立麦弗逊式1/4汽车前悬架模型,假设所有零部件均为刚体,各运动副为刚性连接,车体与轮胎相对于路面只做垂直运动。模型包括了上横臂、转向节、下横臂、减振器、车轮、车身、测试平台、转向横拉杆等零件[4],如图1所示。构件之间的约束包括5个球副、3个固定副、2个旋转副、2个移动副、1个点面约束副、1个万向副和1个驱动约束。计算得到系统模型的自由度数F=2。
对于2自由度的1/4汽车悬架来说,由于其求解简便、计算量小,同时也能反映评定悬架系统优劣的几个重要指标,因此在悬架控制研究方法中被广泛采用。

图1 1/4车悬架多体动力学模型
1.2 随机路面模型的建立
评价悬架系统的性能指标主要包括乘坐舒适性和操纵稳定性。路面的不平度是影响悬架动力学特性以及使车辆产生振动的主要因素。当车速为一定值时,速度谱密度为常数,设定时域功率谱为一不随频率变化的白噪声信号,对振动的描述常采用白噪声加以模拟。
随机路面输入可用下式来表示[5]:

其中:G0为路面不平度系数,假设为B级路面,G0=2.56×10-6m2/m-1;v为车辆行驶速度,此处设定车速v=20m/s;选取白噪声w(t)的时间为20s;f0为下截止频率,此处f0取值为0,滤波器为一个积分环节。在Simulink中建立随机路面输入的仿真模型,如图2所示。
设置仿真时间为20s,点击开始键,随后可在示波器中看到模拟出的路面随机输入产生的激励,如图3所示。

图2 随机路面仿真框图

图3 随机路面激励
2 模糊控制系统的建立
为提高悬架的行驶平顺性和操纵稳定性,选取评价悬架性能指标的车身加速度、悬架动挠度、车轮动位移中最能反映汽车平顺性和振动特性的车身加速度作为控制目标。将车身垂向加速度与设定值的差E和车身垂向加速度与设定值的差的变化率EC作为模糊系统的两个输入变量,模糊控制悬架中的阻尼减振器中的可变阻尼力大小U作为控制器的输出变量。
在MATLAB中建立半主动控制悬架的模糊控制系统,本文选取广泛采用的二维模糊控制器。E、EC和U分别用NB、NM、NS、ZE、PS、PM、PB语言变量表示,在MATLAB的模糊工具箱中共设计了49条模糊控制规则。
3 ADAMS和MATLAB的联合仿真
3.1 ADAMS设定输入输出
ADAMS和MATLAB的联合仿真是通过ADAMS/Control模块与MATLAB的接口连接实现的。在联合仿真之前,需要在ADAMS中对建立的多体动力学悬架模型进行输入输出变量的设定。
输入变量是悬架上可变阻尼器上力的大小,在模型中定义的作用力SFORCE=VARVAL(.MODEL_1.E),表示作用力SFORCE由状态变量E中获得。输出变量设定中,设定车身垂向加速度(M),在ADAMS/View菜单栏 中,依 次 选 择Build/system element/state variable/new[6],在对话栏Name中输入定义的垂向加速度变量名.MODEL_1.M,在函数F(time,...)栏中输入函数为ACCY(.MODEL_1.M),以求车身垂向加速度。同理设定悬架动挠度(N)和车轮动位移(O)的输出函数。
在ADAMS/Control模块中的输出命令对话框Plant Export中输入所设定的输入、输出函数,Target Software选项为MATLAB,在ADAMS工作目录下生成的M类型文件中包含了车体模型的参数,以实现之后的联合仿真。
3.2 联合仿真模型的建立
将MATLAB中生成的adams_sub模块拖入到在MATLAB中建立的半主动悬架模糊控制仿真框图中,得到如图4所示的系统联合仿真模型。

图4 模糊控制半主动悬架联合仿真模型图
3.3 仿真结果对比
在积分白噪声路面输入下,设定车辆行驶速度为20m/s,仿真步长为0.005s,仿真时间为20s,分别对被动悬架和半主动模糊控制悬架进行联合仿真,对两次仿真的车身垂向加速度、悬架动行程和轮胎动位移进行对比,如图5~图10所示。
从图5~图10中可以看出,在车身垂向加速度、悬架动行程和车轮动位移这3个评定悬架性能指标上看,相对于被动悬架,模糊控制下的半主动控制悬架的性能有了较大的提高,峰值有了明显的降低,使车辆行驶更加平稳,也提高了乘坐舒适性。具体的指标数据与优化百分比如表1所示。

图5 被动悬架车身垂向加速度响应曲线

图6 半主动控制悬架车身垂向加速响应曲线

图7 被动悬架动行程响应曲线
4 结论
在ADAMS/View中建立悬架的多体动力学模型,在MATLAB中进行模糊控制器的设计,利用ADAMS/Control接口,对车辆半主动控制悬架进行ADAMS和MATLAB的联合仿真。结果证明了模糊控制的有效性和联合仿真的实用性,为车辆半主动悬架的开发与设计提供了一种新的途径。
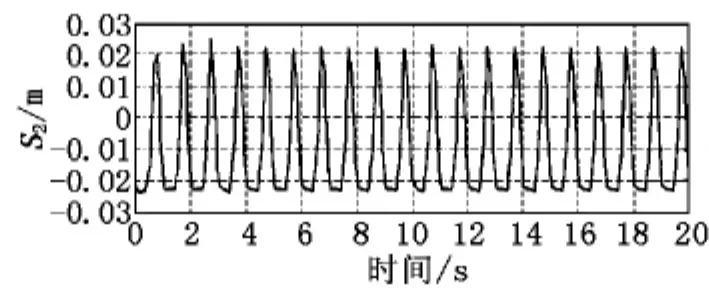
图8 半主动控制悬架动行程响应曲线

图9 被动悬架轮胎动位移响应曲线
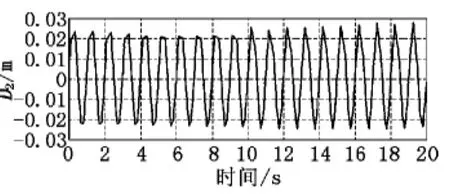
图10 半主动控制悬架轮胎动位移响应曲线

表1 仿真结果比较
[1]Yao G Z,Yap F F,Chen G.MR damper and its application for semi-active control of vehicle suspension system[J].Mechatronics,2002,12(7):963-973.
[2]Capitani J R,Masi G,Meneghin A,Rosti D.Handling analysis of two-wheel vehicle using MSC.ADAMS/motorcycle[J].Vehicle System Dynamics,2006,44(1):698-707.
[3]宋宇.空气悬架车辆ADAMS与MATLAB联合仿真研究[D].合肥:安徽农业大学,2008:34-36.
[4]李军,邢俊文,谭文洁.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[5]Choi S B,L ee H S,Park Y P.H∞control performance of a full-vehicle suspension featuring magnetorheological dampers[J].Vehicle System Dynamics,2002,8(5):355-360.
[6]张大千,张天侠,郭生,等.车辆半主动悬架的模糊控制与仿真[J].机械设计,2008,25(9):21-24.
