小型断路器操作机构的动作可靠性分析
2015-12-29陈文华,张文,潘骏等
小型断路器操作机构的动作可靠性分析
陈文华张文潘骏张廷秀陈丽丽
浙江理工大学浙江省机电产品可靠性技术研究重点实验室,杭州,310018
摘要:对小型断路器操作机构的动作可靠性灵敏度进行探讨。运用机构可靠性设计理论中的Monte Carlo法分析了操作机构在过载分断时的动作可靠性,构建了操作机构在过载分断时的动作可靠性模型;同时,利用Monte Carlo法分析了操作机构的动作可靠性灵敏度,给出了操作机构随机参数可靠性灵敏度的变化规律,研究了随机参数的改变对操作机构动作可靠性的影响。结果表明,该方法能够有效地分析小型断路器操作机构的动作可靠性,同时也可为小型断路器操作机构的可靠性设计提供参考。
关键词:小型断路器;操作机构;动作可靠性;灵敏度
中图分类号:TM561.1;TB114.3
收稿日期:2014-10-22
基金项目:国家自然科学基金资助项目(51275480);浙江省重点科技创新团队计划资助项目(2010R50005)
作者简介:陈文华,男,1963年生。浙江理工大学浙江省机电产品可靠性技术研究重点实验室教授、博士生研究生导师。主要研究方向为可靠性设计、试验和统计分析。张文,男,1990年生。浙江理工大学浙江省机电产品可靠性技术研究重点实验室硕士研究生。潘骏,男,1974年生。浙江理工大学浙江省机电产品可靠性技术研究重点实验室教授。张廷秀,男,1988年生。浙江理工大学浙江省机电产品可靠性技术研究重点实验室硕士研究生。陈丽丽,女,1990年生。浙江理工大学浙江省机电产品可靠性技术研究重点实验室硕士研究生。
Action Reliability Analysis of Operating Mechanism in Miniature Circuit Breaker
Chen WenhuaZhang WenPan JunZhang TingxiuChen Lili
Zhejiang Province’s Key Laboratory of Reliability Technology for Mechanical &
Electrical Product,Zhejiang Sci-Tech University,Hangzhou,310018
Abstract:The operating mechanism action reliability of miniature circuit breaker was studied. The action reliability of miniature circuit breaker was investigated and the mechanism action reliability model was built at the overload breaking moment by using Monte Carlo method of mechanism reliability design theory. Meanwhile, the action reliability sensitivity of mechanism was analyzed, which gave out the variation laws of random parameters reliability sensitivity and the impacts of random parameter changes to operating mechanism action reliability. The analytical results indicate that the method used herein can analyze action reliability of miniature circuit breaker operating mechanism effectively and provide a basis for the design of miniature circuit breaker operating mechanism as well.
Key words;miniature circuit breaker;operating mechanism;action reliability;sensitivity
0引言
小型断路器属于低压断路器的一种,主要用于保护电路和控制照明,其分断能力对电气线路保护和电器安全起着关键的作用[1]。小型断路器具有过载保护和短路保护的功能,还具有分断能力高和限流强等优点。本文研究的对象为小型断路器的操作机构,小型断路器所有功能都需要通过操作机构完成动作而实现,其工作可靠性很大程度上都依赖于操作机构的动作可靠性。
目前,研究人员从不同方面对小型断路器的操作机构进行了研究。文献[2]采用虚拟样机技术对断路器操作机构进行了动态仿真,并在此基础上研究了操作机构结构参数对断路器开断速度的影响,对其进行了优化设计。文献[3]利用ADAMS软件和Flux软件,对小型断路器在短路情况下的操作机构分断过程进行了动力学仿真。文献[4]利用多体动力学软件ADAMS对断路器操作机构的动作过程进行仿真,研究了弹簧弹性系数和转轴位置对操作机构速度的影响。文献[5]利用FMEA方法对低压断路器进行可靠性分析,研究了操作机构在使用过程中的各种故障模式。文献[6]结合多体动力学和有限元分析方法,分析了操作机构关键部位在碰撞条件下应力的动态分布。文献[7]研究了连杆转换位置对断路器操作机构性能的影响,并对其进行了优化设计。虽然对断路器操作机构的研究已经非常多,但关于操作机构运动功能(动作)可靠性分析方面的研究却比较少。
本文以DZ47-60型小型断路器为研究对象,采用Monte Carlo方法对其操作机构在过载分断时的动作可靠性进行分析,研究了操作机构在过载分断时的可靠度。同时在基本随机变量概率特性已知的情况下,分析了操作机构中重要构件的灵敏度。
1小型断路器操作机构工作原理和受力分析
图1是DZ47-60型小型断路器闭合状态时操作机构的结构示意图,它主要由手柄1、上连杆2、锁扣杆3、中心支架4、触头附件5和脱扣杆6等构件组成。
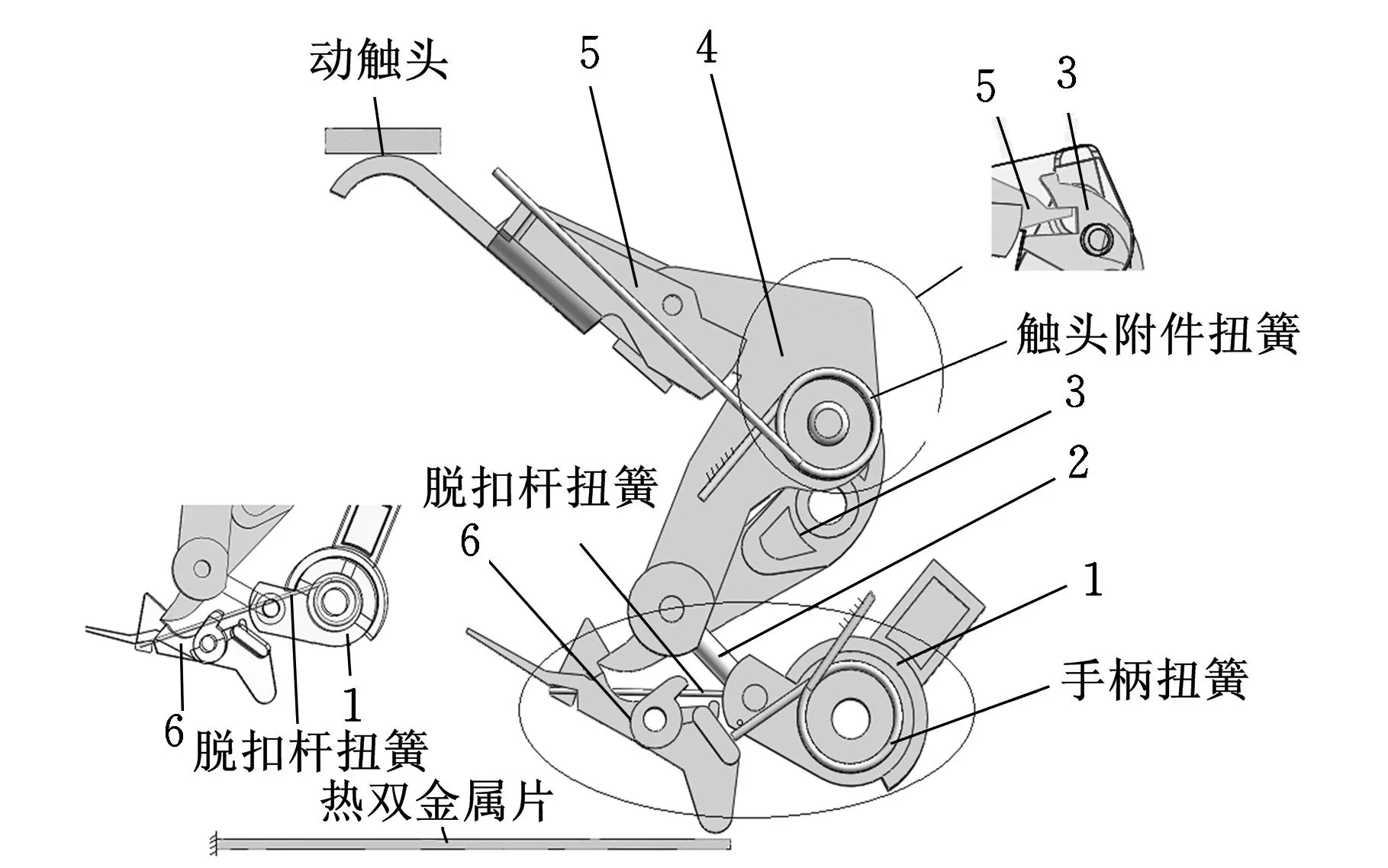
1.手柄 2.上连杆 3.锁扣杆 4.中心支架 5.触头附件 6.脱扣杆 图1 小型断路器结构示意图
图1是小型断路器闭合时操作机构的示意图。当出现过载电流时,热双金属片右端产生向上的推力作用于脱扣杆6,脱扣杆6克服锁扣杆3的作用力和脱扣杆扭簧的阻力矩M1沿逆时针方向转动,使脱扣杆6与锁扣杆3脱开。同时,锁扣杆3与触头附件5脱开,触头附件5在触头附件扭簧扭矩M2的作用下逆时针转动,使动触头与静触头断开。同时,触头附件5带动中心支架4逆时针转动,上连杆2受到中心支架4的作用逆时针转动,手柄受到上连杆2的作用顺时针转动,并在手柄扭簧扭矩M3的驱动下返回到断开位置。
小型断路器在闭合状态时,操作机构受到的外力主要有脱扣杆扭簧扭矩M1、触头附件扭簧扭矩M2、手柄扭簧扭矩M3和静触头对动触头的触头反力P2。若各转动副中的摩擦力忽略不计,则机构各构件的受力情况如图2所示。
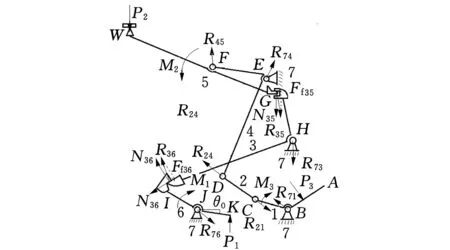
图2 小型断路器操作机构的机构受力简图
当小型断路器发生过载脱扣时,脱扣杆6受到热双金属产生的推力作用,克服作用力R36和阻力矩M1而发生动作,使脱扣杆6与锁扣杆3解锁,锁扣杆的受力平衡被打破,不再受到力R63和力R53的作用。同时,触头附件也将不受到力R35的作用,此时触头附件将处于自由状态,所以触头附件必将会在触头附件扭簧扭矩M2的作用下动作而使动静触头分离。同时,中心支架在触头附件的带动下也将会运动,并且由中心支架、上连杆和手柄组成的四连杆机构将在手柄扭簧产生的扭矩M3的作用下运动。所以操作机构的动作可靠性取决于脱扣杆6与锁扣杆3解锁动作的可靠性。
由图2可知,若以触头附件6为受力体,对F点取矩可得
M2+P2lP2=R35lR35
(1)
式中,lP2为转动副F点到力P2作用线的垂直距离;lR35为转动副F点到力R35作用线的垂直距离。
若以锁扣杆3为受力体,对H点取矩可得
(2)

若以脱扣杆为受力体,对J点取矩可得
(3)


(4)
2操作机构过载分断时的可靠性模型
小型断路器在脱扣时操作机构从静止状态到相对运动状态,必须保证启动时作用于脱扣杆上的驱动力矩Md大于脱扣杆上的阻力矩Mr,则操作机构的极限状态方程为
Z=G(Md,Mr)=Md-Mr=0
(5)
因此,操作机构启动可靠性模型为
Rst=P(Z>0)=P(Md-Mr>0)
(6)
3操作机构的动作可靠性分析
3.1驱动力矩概率及分布
在电流过载时,热双金属片通入大电流后发热,产生向上的推力,使脱扣杆6与锁扣杆3解锁,这个热推力也就是脱扣力。对转动副J点取矩,脱扣力产生的力矩就是驱动力矩Md:
Md=P1l1cosθ0
(7)
式中,P1为热双金属片产生的推力,即脱扣力;l1为受力作用点K到转动副J点的距离;θ0为l1与x轴的初始夹角(图2)。
热双金属片产生的推力P1为[8]
(8)
式中,k为比弯曲率;EM为热双金属片弹性模量;b为热双金属片宽度;δ为热双金属片厚度;L为热双金属片长度;Δt为热双金属片温升。
本文研究的是小型断路器在通入1.45倍额定电流时操作机构的动作可靠性,此时发生过载脱扣时,热双金属片的温升Δt=70℃。再根据各参数的值:k=15×10-6/℃,b=6mm,δ=0.6mm,EM=152GPa,L=34.6mm,得出推力P1=2.6N。
在式(7)中,P1和θ0为常量,且P1=2.6N,θ0=10°;l1=(8±0.09)mm,服从正态分布。利用MonteCarlo数值模拟的方法得出驱动力矩Md的均值μMd=20.4838N·mm,标准差σMd=0.0758N·mm,模拟抽样的组数为10 000,其直方图见图3。由图3可知,驱动力矩Md可近似认为服从正态分布。
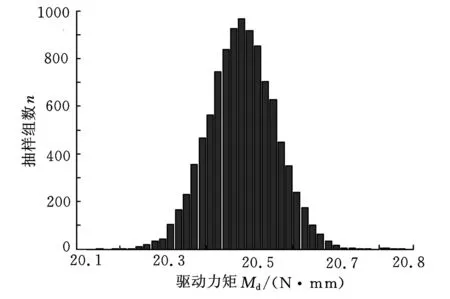
图3 驱动力矩的模拟直方图
3.2阻力矩概率及分布
(1)脱扣杆扭簧产生的扭矩M1为
M1=K1φ1
(9)
式中,K1为脱扣杆扭簧的刚度;φ1为脱扣杆扭簧扭转角度。
(2)脱扣杆与锁扣杆之间的作用合力R36产生的阻力矩为
M4=R36lR36
(10)
其中,R36由力学分析已得出,即式(4)。
而触头附件扭簧扭矩为
M2=K2φ2
(11)
式中,K2为触头附件扭簧的刚度;φ2为触头附件扭簧扭转角度。
(3)总阻力矩Mr为
(12)
在式(12)中,K1、K2和P2为常量,其他均为随机变量,且相互独立,并认为均服从正态分布。
扭簧刚度K1和K2的计算方法为[8]
(13)
式中,ET为扭簧弹性模量;d为扭簧直径;D为扭簧中径;Nc为有效圈数。
脱扣杆扭簧和触头附件扭簧参数值见表1。

表1 脱扣杆扭簧和触头附件扭簧各参数值
根据表1和式(13)可以计算得出K1=0.061N·mm/(°),K2=1.95N·mm/(°)。
P2为触头反力,其计算方法为[8]
(14)
其中,Q为与接触材料、表面等有关的系数,一般取Q=0.0002;u为与接触形式有关的系数,一般取u=1;Rc为接触电阻,Rc=0.1mΩ 。所以P2=2N。
在式(12)中,φ1的均值μφ1=45°,φ2的均值μφ2=30°,取变异系数为0.05,则φ1的标准差均值σφ1=2.25°,φ2的标准差σφ2=1.5°。根据机构的位置与构件关系,得出各力臂长度的均值和标准差见表2。

表2 各力臂长度的均值、公差范围和标准差 mm
利用Monte Carlo数值模拟方法得出阻力矩Mr的均值μMr=12.8615N·mm,标准差σMr=0.6472N·mm,模拟抽样的组数为10 000,其直方图见图4。由图4可知,阻力矩Mr也可近似认为服从正态分布。

图4 阻力矩的模拟直方图
3.3操作机构的动作可靠性及灵敏度
3.3.1可靠度计算
根据式(5)得出操作机构的极限状态方程为
Z=G(Md,Mr)=Md-Mr
(15)
在式(15)中,μMd=20.4838N·mm,σMd=0.0758N·mm;μMr=12.8615N·mm,σMr=0.6472N·mm。利用Monte Carlo法得出可靠度指标和可靠度分别为
β=3.5412
(16)
R=Φ(β)=Φ(3.5412)=0.999 84
(17)
3.3.2灵敏度分析
式(15)可以写成
Z=G(Md,Mr)=Md-Mr=P1l1cosθ0-Mr=

(18)
式(18)中,P1=2.6N,θ0=10°,K1=0.061N·mm/(°),K2=1.95N·mm/(°),P2=2N,其他变量均为随机变量,且相互独立,并均服从正态分布。则式(18)可简化为
Z=G(Md,Mr)=Md-Mr=2.56l1-0.061φ1-
(19)
再进一步分析上述随机变量的分布参数对启动阶段失效概率的影响程度,即失效概率Fst对基本随机变量分布参数(均值μxi和标准差σxi)的偏导数。
利用Monte Carlo法求可靠性灵敏度,极限状态函数为g(x)=Z,基本随机变量为
它的联合概率密度函数用f(x)表示,则失效概率Pf(即Fst)为
Pf=P(g(x)<0)=∫Ωf(x)dx
(20)

(21)
式中,IF(x)为失效域F的指示函数;Rn为n维变量空间。
Monte Carlo法在计算式(21)所示的数学期望时,采用样本均值来代替总体均值,可得[9]
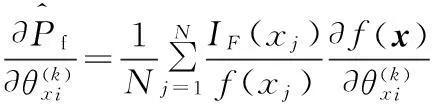
(22)
式中,xj为联合概率密度函数f(x)抽取的N个样本中的第j个样本。
而Monte Carlo法可靠性灵敏度估计值的方差为[9]
(23)
则根据式(21)和式(23)可得其相应的可靠性灵敏度值见表3。从表3中可见,转动副F点到力P2的作用线的垂直距离、脱扣杆扭簧的扭转角度φ1对小型断路器操作机构脱扣的失效概率影响最大。
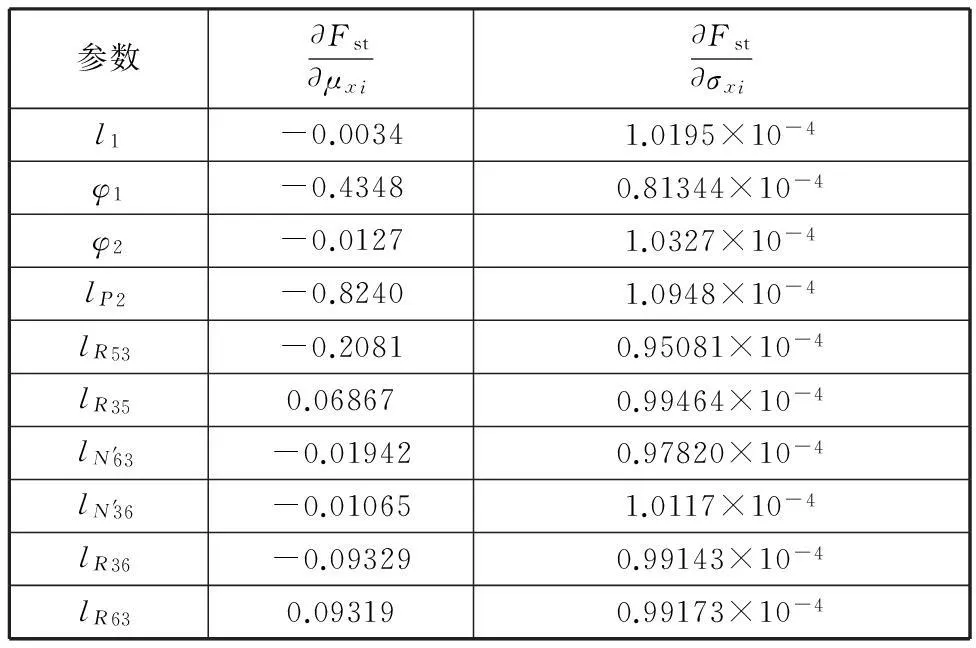
表3 脱扣杆各分布参数的灵敏度值
4结论
本文通过构建小型断路器操作机构在过载分断时的动作可靠性模型,运用Monte Carlo方法建立了机构动作可靠性的分析方法,并计算了操作机构在过载分断时的可靠度,结果表明小型断路器操作机构在过载分断时具有高的可靠性。在此基础上,分析计算了操作机构各构件参数对机构可靠性的灵敏度,得到了机构可靠性的敏感参数为:触头反力与锁扣杆和触头附件之间转动副的距离,以及脱扣杆扭簧的扭转角度。所建立的机构动作可靠性分析方法不仅可为分析计算小型断路器操作机构的动作可靠性提供理论依据,而且对小型断路器操作机构动作可靠性的提高有促进作用。
参考文献:
[1]骆燕燕. 小型断路器的可靠性研究[D]. 天津:河北工业大学, 2000.
[2]张敬菽, 陈德桂, 刘洪武. 低压断路器操作机构的动态仿真与优化设计[J]. 中国电机工程学报, 2004, 24(3): 102-107.
Zhang Jingshu,Chen Degui,Liu Hongwu.Dynamic Simulation and Optimum Design of Low-voltage Circuit Breaker[J].Proceedings of the CSEE,2004,24(3):102-107.
[3]潘锋,邹慧君,李广利.小型断路器机构的动力学研究[J].机械设计与研究,2008,23(6):98-101.
Pan Feng,Zou Huijun,Li Guangli.Dynamic Research of Mechanism in Miniature Circuit Breaker[J].Machine Design and Reasearch,2008,23(6):98-101.
[4]Chen Tong,Hu Wenchao.A Study of Improving the Design of Low Voltage Circuit Breaker Operating Mechanism Based on the Virtual Prototype Technology[C]//Computer Science and Automation Engineering(CSAE),2012 IEEE International Conference on.Zhangjiajie,China,2012:796-799.
[5]陈玉兵,石世宏,傅戈雁,等.基于FMEA塑壳断路器操作机构的可靠性分析[J].苏州大学学报(工科版),2009,29(3):31-35.
Chen Yubing,Shi Shihong,Fu Geyan,et al.Reliability Analysis on the Operating Mechanism of Circuit Breaker Based on FMEA[J].Journal of Suzhou University(Engineering Science Edition),2009,29(3):31-35.
[6]李瑞, 李兴文, 陈德桂, 等. 低压断路器操作机构的应力分析方法及应用[C]//第一届电器装备及其智能化学术会议论文集.西安:西安交通大学,2007:229-236.
[7]季良,陈德桂,刘颖异,等.连杆转换位置对MCCB操作机构的影响及其优化[J].电工技术学报,2010,25(9):87-91.
Ji Liang,Chen Degui,Liu Yingyi,et al.Analysis and Optimization of Linkage Transfer Position for the Operating Mechanism of MCCB[J].Transactions of China Electrotechnical of Society,2010, 25(9):87-91.
[8]连理枝.低压断路器设计与制造[M]. 北京:中国电力出版社, 2003.
[9]吕震宙.结构机构可靠性及可靠性灵敏度分析[M].北京:科学出版社,2009.
(编辑苏卫国)

