某击发机构动力学仿真研究
2015-12-28陈伟陈秋红胡有璋赵威陈瑶
陈伟,陈秋红,胡有璋,赵威,陈瑶
(1. 中国人民解放军73853部队 江苏 南京 211811;2. 南京理工大学 机械工程学院, 江苏 南京 210094; 3. 南京禄口国际机场 江苏 南京 211113;4. 中国人民解放军75250部队 广东 广州 510800; 5. 南京军区联勤部信息中心,江苏 南京 210016)
某击发机构动力学仿真研究
陈伟1,2,陈秋红3,胡有璋1,赵威2,4,陈瑶5
(1. 中国人民解放军73853部队 江苏 南京 211811;2. 南京理工大学 机械工程学院, 江苏 南京 210094; 3. 南京禄口国际机场 江苏 南京 211113;4. 中国人民解放军75250部队 广东 广州 510800; 5. 南京军区联勤部信息中心,江苏 南京 210016)
摘要:为了研究击发机构的力学特性,对击发机构零部件进行三维实体建模,考虑拨动子驻栓、发射器推杆和电磁连杆的柔性,利用Hypermesh软件对它们进行模态分析,生成可被动力学分析软件ADAMS调用的模态中性文件,建立击发机构刚柔耦合动力学模型,对击发机构进行了刚柔耦合动力学分析和对击发机构机理分析使用方法与手段,分析结果对于火炮击发机构的设计具有一定的参考价值。
关键词:击发机构;多体动力学;刚柔耦合;ADAMS
0引言
击发机构是火炮的重要组成部分,在火炮发射时,击针在冲击力的作用下猛烈地撞击底火,使底火壳发生变形,底火内的击发药受到猛烈的挤压而被点燃,并进而引燃发射药[1]。击发机构包含部件众多,且各部件在工作过程中存在复杂的接触和碰撞关系,因此获取击发机构工作时各部件实际的运动情况,将会为击发机构的结构设计和性能改善提供重要依据。
1击发机构工作原理
研究的击发机构是击锤式击发机构,采用电磁击发和手动机械击发两种击发方式,其中手动机械击发方式和电磁击发方式原理基本相同,现仅对采用电磁击发方式时击发机构的运动情况进行分析。击发机构结构如图1所示。

图1 击发机构三维装配图
工作原理为[2]:按压电磁铁击发按钮—击发配电盒—击发电磁铁—电磁铁推动电磁杆—撞击击发挡板—撞击炮尾中的发射器推杆—撞击发射器杠杆—撞击炮闩中的拨动子驻栓—解脱拨动子—释放击锤弹簧和击发击锤—撞击击针—撞击底火来完成击发的任务。
2击发机构动力学仿真
2.1击发机构刚柔耦合建模流程设计
为了充分模拟击发机构的工作过程,在进行动力学建模时应该充分考虑系统部件本身的材料和结构所具有的弹性对系统运动产生的影响。故将击发机构所有的部件都作为刚性部件处理是不符合实际的。在本击发机构中,考虑到拨动子驻栓、发射器推杆、电磁连杆的柔性对仿真结果影响比较大,故将这3个部件进行柔性处理。建立该击发机构刚柔耦合模型的流程如图2所示。
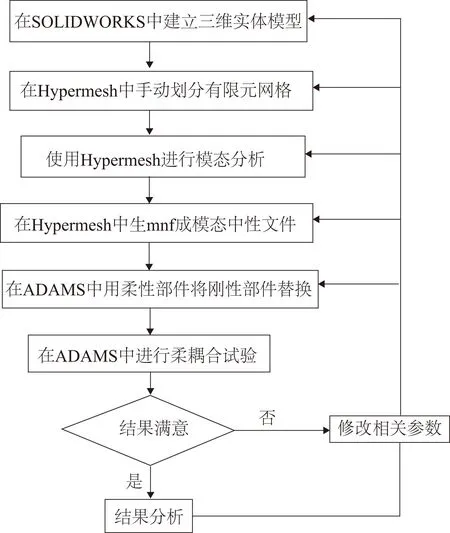
图2 击发机构刚柔耦合模型建模流程图
2.2柔性部件模态分析
在进行柔性多体系统动力学分析时,首先要计算构件在不计阻尼情况下的固有频率和振型。主振动模态或者振型是指结构在某频率下的变形,其中每阶振型都与其特定的固有频率相关,它们可以反映构件自身的动力学特征,同时也决定了构件怎样去响应其外部动力载荷。固有模态可以组合构件的各动力学响应,模态分析的结果同时也是多种动态响应的判据,所以首先对构件进行模态分析。
2.2.1模态分析理论基础[3-5]
1) 多自由度动力学方程
动力学有限元法的控制平衡方程为:

(1)

由于模态是系统结构的固有特性,只与自身条件相关,与外部激励条件无关。因此系统的固有频率和振型可以通过求解式(2)(系统的自由振动方程)来得到。

(2)
由于系统在自由振动时F(t)=0,阻尼对结构的固有频率和振型影响很小,因此可以去掉阻尼项,得到没考虑阻尼系统的自由振动方程,如式(3)所示:

(3)
2) 结构的固有频率和振型
在实际的应用中,可以把结构的自由振动看成是由一系列简谐振动的叠加组成,因此要得到结构自由振动的固有频率及振型,可以考虑如式(4)所示简谐振动的解:
{X(t)}={φ}sin(ωt)
(4)

(5)
由经验可知,物体的密度ρ>0,[M]是对称正定矩阵,没有作处理时[K]是对称半正定阵。不过,假如在实际问题中有位移约束条件,矩阵[K]经过处理后就是正定矩阵。
令λ=ω2
(6)
代入式(5)可得:

(7)
假如[K]为N阶矩阵,那么式(7)就是特征值λ的N次代数方程,由此可以确定N个广义特征值λ(i=1,…,n)。若[K]是对称正定阵,λ就是正实数,因此弹性体的N个固有频率可以由式(6)得到:
(8)
其中:N是节点位移参数的总自由度。
2.2.2模态分析模型建立
将建好的三维实体模型直接导入Hypermesh软件进行有限元模型网格划定和模态文件生成。考虑到计算的精度,选用精度较高的8节点等参6面体单元。在Hypermesh软件中需要定义这3个柔性体的材料,相关的材料参数见表1,其中E为材料的弹性模量,为材料的泊松比,为材料密度。
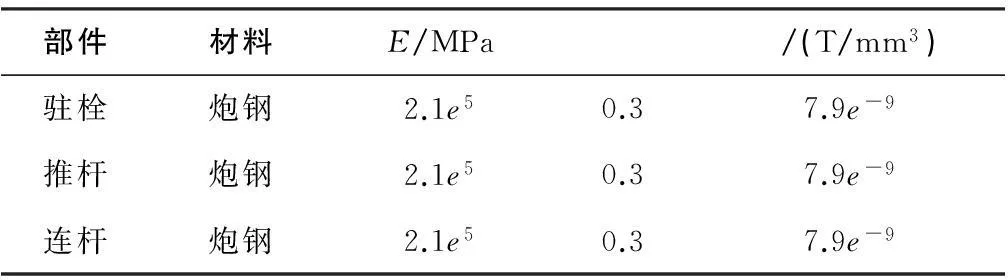
表1 柔性体的材料参数
划分好的拨动子驻闩、发射器推杆和电磁连杆各自拥有的单元个数和节点个数如表2所示。

表2 柔性体有限元参数
采用Block Lanczos法来进行模态提取工作,该方法能提取较多的模态,并且对内存要求较低,适应于大型模型,因此广泛的应用于许多大型有限元软件。
2.2.3模态分析结果
电磁连杆第7阶以后的主模态信息见表3,部分模态变形图如图3所示。

表3 电磁连杆主模态信息

图3 第9阶主模态
2.3建立刚柔耦合模型
将在Hypermesh软件中生成的柔性体模态中性文件导入到ADAMS软件中去[6]。首先将击发机构刚性模型导入到ADAMS软件中,然后采用柔性体替换刚体(Rigid To Flex)的方法分别将拨动子驻栓、发射器推杆和电磁连杆使用相应的柔性体进行替换。建立好的刚柔耦合模型示意图如图4所示。
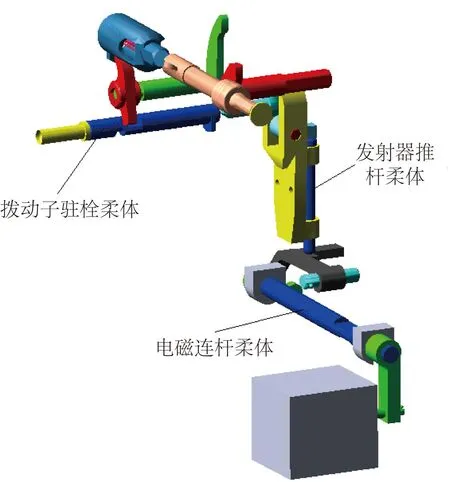
图4 击发机构刚柔耦合模型图
3仿真结果及分析
图5所示为拨动子驻栓位移曲线图。由图5可知,在0.0124s时,发射器压杆撞击拨动子驻栓,拨动子驻栓在碰撞力的作用下沿炮闩向右移动;在0.019s时,拨动子驻栓停止移动,最终拨动子驻栓没有释放拨动子,即本次击发不成功。
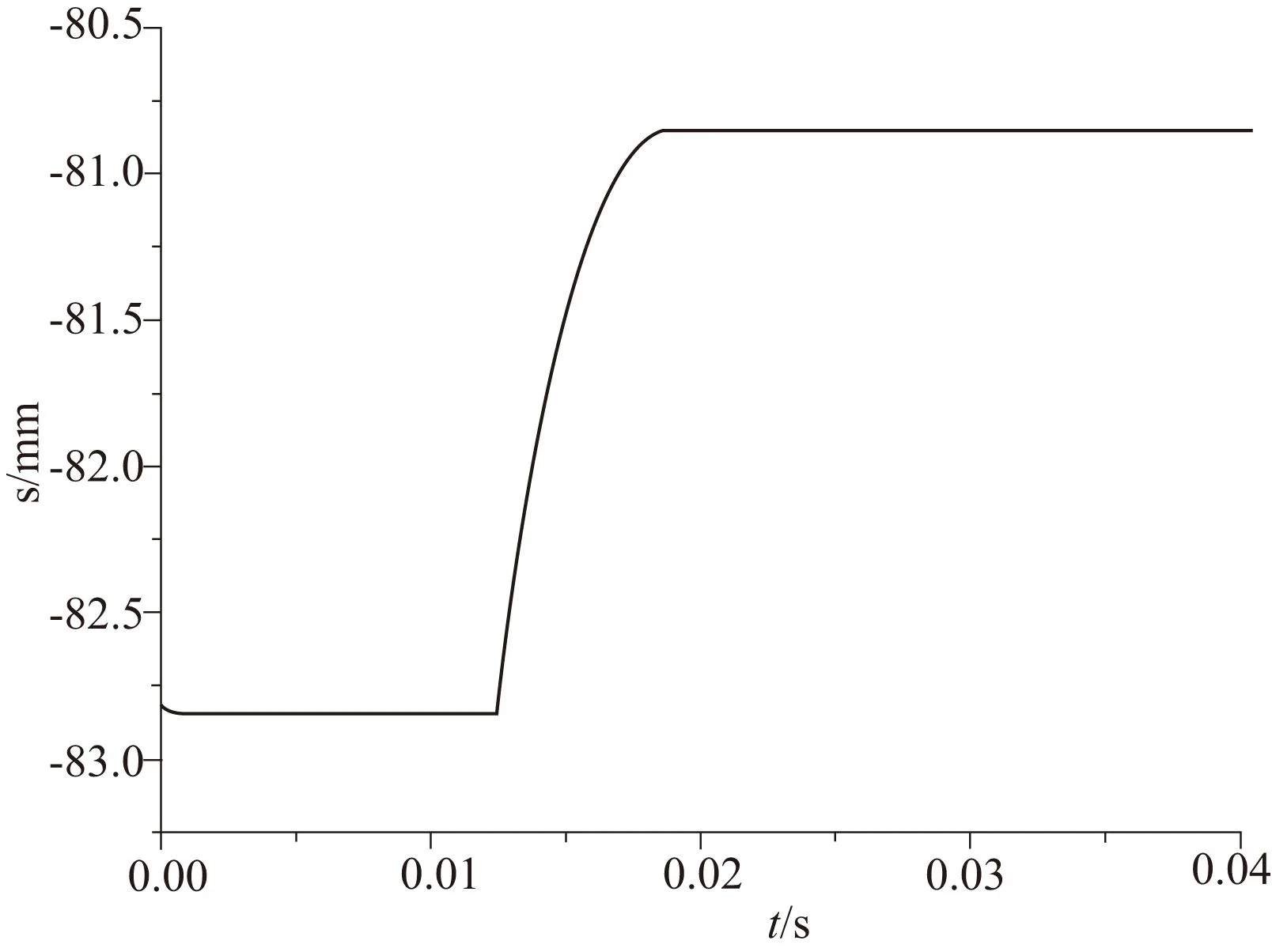
图5 拨动子驻栓位移曲线图
图6所示为推杆位移曲线图,由图6可知,在0.102s时,击发挡板撞击发射器推杆,使发射器推杆沿发射器支架运动;在0.0184s时,发射器推杆速度为零,在压杆弹簧和重力的作用下,沿发射器支架往回运动;在0.04s时,发射器推杆还没有回复到初始位置。
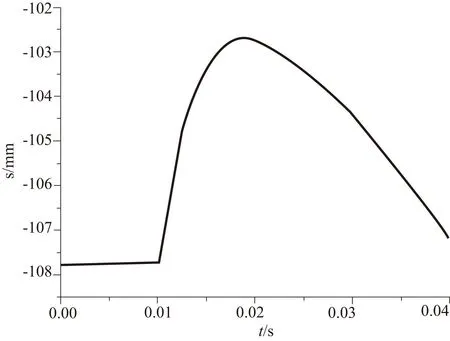
图6 推杆位移曲线图
图7为电磁连杆角速度时间曲线,在0.009s时,电磁连杆角速度达到最大,然后突然下降,这说明在这个时候,底座部件在撞击击发挡板,击发挡板开始运动;在0.0102s时,角速度又减小,说明击发挡板撞击推杆,自身速度减小,阻碍了电磁连杆的运动;在0.0184s时,电磁连杆速度为零,在重力作用下往回运动。从图7中的速度变化可以看出,在碰撞力的作用下,电磁连杆存在着柔性变形。

图7 电磁连杆角速度
图8为拨动子驻栓与发射器压杆碰撞力随时间变化曲线,由图可以看出,在0.0124s时,发射器压杆撞击拨动子驻栓,由于拨动子驻栓柔性的原因;在0.0125s时,碰撞力达到最大,为1342N;在0.019s时,发射器压杆与拨动子驻栓相分离,在压杆弹簧的作用下往回运动。
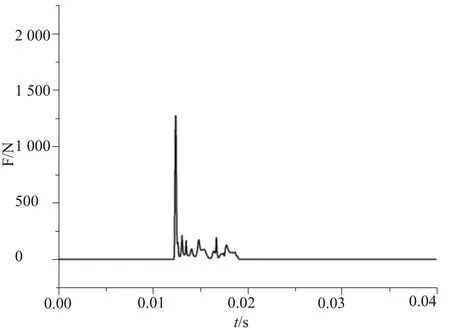
图8 拨动子驻栓和发射器压杆碰撞力
4结论
以某击发机构为研究对象,建立了击发机构刚柔耦合动力学模型,考虑了击发机构里面含有的接触/碰撞等因素,经仿真计算得到了击发机构击发时各部件的接触/碰撞关系,为研究击发机构工作过程中的力学性能提供了参考。
参考文献:
[1] 张相炎,管红根. 火炮概论[M]. 北京:北京理工大学出版社, 2006.
[2] 张景新, 卫志康. 炮闩击发机安全极限磨损角分析[J]. 弹道学报, 2005, 17(1):77-81.
[3] 李德葆. 振动模态分析及其应用[M]. 北京:宇航出版社, 1989.
[4] 刘延柱, 陈文良. 振动力学[M]. 北京:高等教育出版社, 2005.
[5] 朱茂桃,何志刚,徐凌,等. 车身模态分析与振型相关性研究[J]. 农业机械学报,2004, 35(3): 13-15.
[6] 李增刚. ADAMS入门详解与实例[M]. 北京: 国防工业出版社, 2010.
Research on Dynamic Simulation of Firing Mechanism
CHEN Wei1,2, CHEN Qiu-hong3,HU You-zhang1,ZHAO Wei2,4, CHEN Yao5,
(1. Unit 73853 of PLA, Nanjing 211811,China;
2. School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094,China;
3. Nanjing Lukou International Airport, Nanjing 211113,China; 4. Unit75250 of PLA, Guangzhou 510800,China;
5. Nanjing Military Logistics Department Information Center, Nanjing 210016, China)
Abstract:In order to study the mechanical properties of the firing mechanism, the modeling of the three Dsolid parts of the firing mechanism is established, considering the flexibility of the cocking lever sear, launcher putter and electromagnetic rod, the modal analysis is done by Hypermesh software, the modal neutral file used by the dynamic analysis software ADAMS is generated, the rigid and flexible coupling dynamics model is established and rigid and flexible coupling dynamics of the firing mechanism is analyzed. The methods and approaches of its analysis and the design of the artillery are of certain reference value.
Keywords:firing mechanism; dynamics of multi-body; rigid/flexible coupling; ADAMS
收稿日期:2015-02-25
中图分类号:TP391.9
文献标志码:B
文章编号:1671-5276(2015)03-0092-03
作者简介:陈伟(1986-),男,安徽阜阳人,硕士研究生,研究方向:高效毁伤。