基于摩擦原理的高楼自助逃生装置的设计
2015-12-28周长海叶福民周黔贵薛伟
周长海,叶福民,周黔贵,薛伟
(江苏科技大学 机械工程学院, 江苏 镇江 212003)
基于摩擦原理的高楼自助逃生装置的设计
周长海,叶福民,周黔贵,薛伟
(江苏科技大学 机械工程学院, 江苏 镇江 212003)
摘要:利用自行车摩擦片刹车原理,提出了一种基于控制摩擦力大小来减速的高楼自助缓降逃生装置的设计思路。在经过理论计算的基础上设计了样机。该逃生装置通过配重以及利用杠杆原理等方法来放大摩擦力,以此达到控制下降速度的目的,无需外力操控,可作为被困于高楼火灾、爆炸等困境的人们的自救逃生工具。
关键词:高楼;缓降逃生器;摩擦力;设计
0引言
在城市的不断扩张中,楼房也在不断地向着高空延伸,而其带来的危险隐患也越来越大,尤其是在人群密集的大城市,在众多的安全隐患中高楼失火已成为人们不得不考虑的问题[1]。目前国内外现有的高层建筑逃生装置主要有三种类型[2]。1) 机械电动式,这种逃生装置需要电源提供动力,而在灾害发生时电源能否使用是一个未知数,不宜推广使用。2) 斜索滑降逃生装置,该装置需要别人先将绳索的一端固定在地面上,然后逃生者依靠斜索滑降逃生,但是当只有一个人时无法独立逃生。3) 采用液体流动阻尼的方法进行缓降逃生,这类装置结构复杂,密封性不能完全保证,且价格比较昂贵。因此,设计一种简单,方便,快捷,适用于大多数人群的紧急逃生装置对于人们的生命财产能够起到一定程度的保护作用,也是现代社会应对高楼危险的有效措施。
1机构组成及其工作原理
1.1机构组成
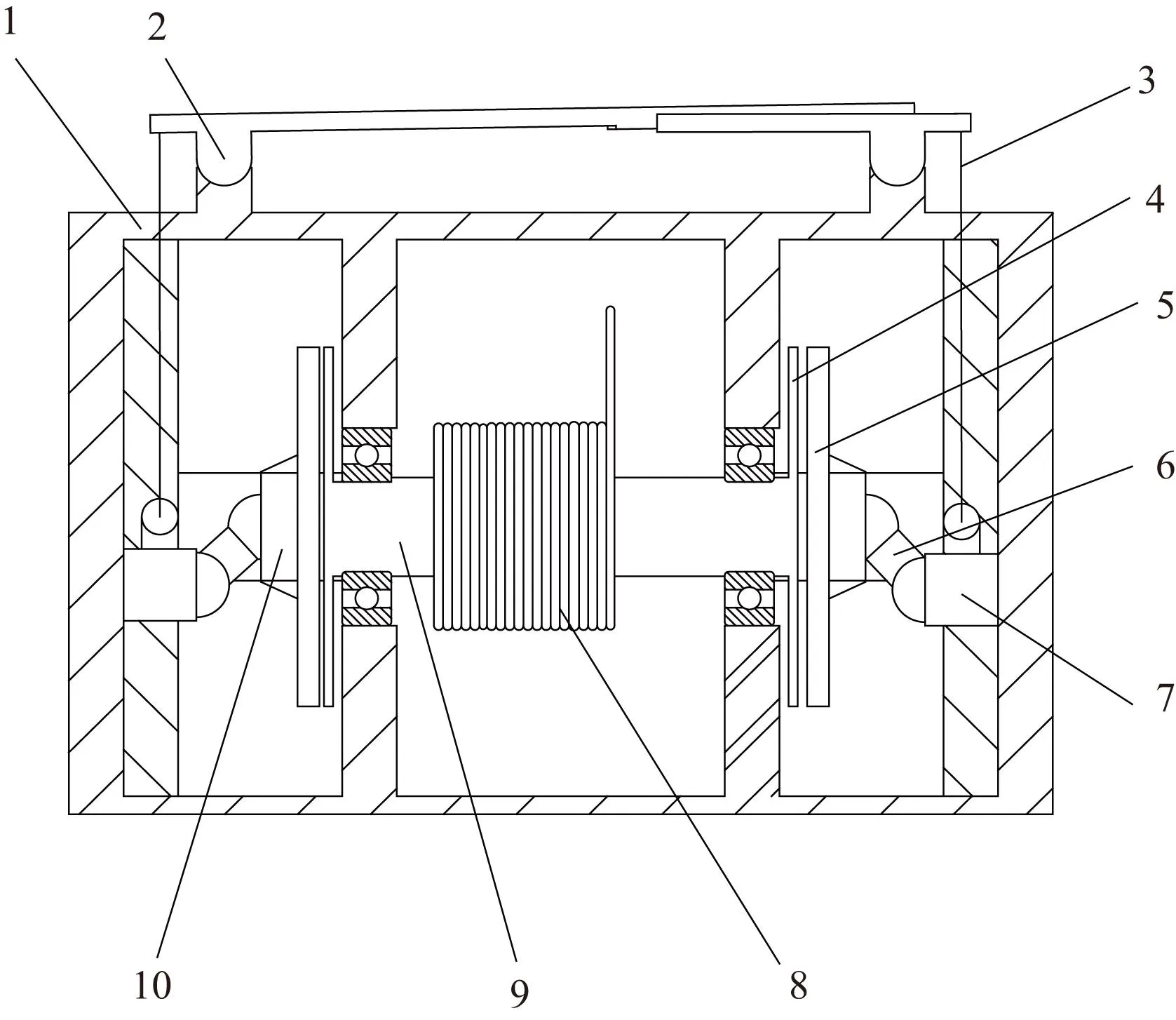
1—箱体;2—脚踏板;3—动力绳;4—摩擦盘;5—摩擦片;6—连杆;7—滑块;8—绳索;9—主轴;10—平衡板图1 高楼逃生装置结构示意图
高楼逃生装置分为两部分,如图1所示。1) 在逃生者身上系上安全绳索以及在逃生装置上安装扶手以保持逃生者重心平衡,防止其在下降过程中与逃生装置脱离;2) 机构主体的组成部分,包括脚踏板、连杆、主轴、摩擦片、摩擦盘、动力绳、滑块、绳索、平衡板、箱体等部件,即通过动力绳3将逃生者产生的重力经过脚踏板2的杠杆原理进行放大之后转化为摩擦片5之间的摩擦力,进而与重力抵消,达到匀速下降的目的。
1.2工作原理
逃生装置的设计通过对摩擦片施加压力来增加摩擦片之间的摩擦力,以此来达到抵消下降时的重力,如图2所示。在图2中,机构工作时,逃生者双脚站立在两端的脚踏板上面,通过杠杆原理使脚踏板下面的连杆往下滑动,且往右运动而使连杆右端的摩擦A片与摩擦轮相接触,在逃生者下降的时候使其两端压力增大,进而产生较大的摩擦力,两端的接触面上因剧烈摩擦产生热量,由能量守恒可知,逃生者和机构的重力势能转换成动能,再由动能转换成摩擦热,在下降的时候绳索的不断拉长使主轴旋转而产生摩擦力矩,这就是使重力矩转化成摩擦力矩达到减速降落的效果。

1—支点;2—脚踏板;3—逃生者;4—配重;5—摩擦A片;6—摩擦B片图2 高楼逃生装置原理示意图
该设计的主要目的,是要确保逃生者下降的速度在安全范围之内,而要达到匀速安全,其核心原理就是使逃生者下降时自身及装置产生的重力与摩擦阻力达到平衡。通过分析计算可知,由摩擦片产生的摩擦阻力在不经过放大的情况下与逃生者和逃生装置产生的动力是不可能达到平衡的。为此,在逃生装置的上方特别增设了杠杆和一定质量的配重,以此来达到放大摩擦阻力的目的。
在这过程之中通过配重4的杠杆原理增大两处摩擦片与摩擦轮的接触压力,也就增大了摩擦力。配重产生的摩擦力矩一部分消耗配重和机械装置的自身重力势能,而剩余的摩擦力矩与人的重力矩相平衡。这样机构就能根据逃生者的自重平衡合理的减小下降的速度安全降落。
逃生者站在脚踏板上面,通过杠杆将逃生者的重力转换成摩擦力,由于滑块的上升,带动连杆的旋转,带动摩擦A片的水平移动,直至与摩擦B片接触产生一定的摩擦力矩,而逃生者由于自身重力在下降时也会对主轴产生一定力矩,且与前者力矩方向相反,所以当两者产生的力矩大小相等时逃生者就可以匀速下降。在踏板上加上适当的配重以抵消该装置产生的重力,这样人的自重与产生的摩擦力就会满足一定的比例关系,通过适当的调节这个关系就可以使重力与摩擦力达到平衡从而达到减速安全降落的目的方法,该方法有效的利用逃生者的自身重力,最大限度的使逃生者逃离困境。
2设计计算和分析
2.1理论计算
摩擦片产生的压力FN为:
(1)
式中:M1为逃生者自身的质量;M3为配重的质量;n1为脚踏板上逃生者到支点的距离与脚踏板端点到支点的距离之比;n2为脚踏板上配重到支点的距离与脚踏板端点到支点的距离之比;α为连杆与主轴之间的夹角;g为重力加速度。
摩擦A片与摩擦B片产生的摩擦力矩Mf为:
(2)
式中:R为摩擦A片半径;μ为摩擦片的摩擦系数。
机构下降时产生的动力矩M为:
(3)
式中:M2为逃生装置的质量;r为装置下降时绳索旋转的半径。
2.2代入参数计算
现令α=45°,n1=6,n2=9,M3=M2。则由式(2)可得:
(4)
由式(3)可得:
(5)
r=2μR
(6)
由以上计算表明,只要式(6)成立,逃生者站在装置上就可以匀速下降,满足设计要求。而在式(6)中摩擦片半径R及其摩擦系数μ均由摩擦片本身决定,故只需确定下降绳索旋转产生的半径r,即可满足下降产生的动力矩与摩擦片产生的摩擦力矩相平衡,即满足匀速下降。
然而在上述推算中也有一些前提条件,预先设定一些参数,即连杆与主轴必须成45°,脚踏板上逃生者到支点的距离与脚踏板端点到支点的距离之比必须为6,脚踏板上配重到支点的距离与脚踏板端点到支点的距离之比必须为9,配重的质量必须与装置自身的质量相同。只有满足这些条件,式(6)才能成立,否则,需要重新调整各个参数,并根据不同的调整参数来重新配备配重的质量。
3结语
1) 根据设置固定的参数可以帮助不同体重的人们逃离火灾现场,体现了它的广泛应用性。
2) 以合理的机械与力学相结合构建的高楼逃生装置,通过计算和分析,可知它是适合大众在高楼危险情况下的一种逃出困境得以保全人身安全的一种逃生装置。
3) 机构的思路明确,有足够的安全可靠性。基于这样简单方便易于安放使用的装置,在较好的为高楼险境做出应对逃生方法的同时,希望有较好的设计评价与相应的经济效益;在挽救危难的逃生者时,能构建一个安全保障的和谐环境。
参考文献:
[1] 岳明辉. 高层建筑逃生装置[J]. 现代职业安全,2010,(03):115-117.
[2] 袁忠均. 离心摩擦式高楼逃生器的设计[J]. 机械设计,2004,(10): 208-209.
[3] 陆宁. 机械原理[M]. 北京: 清华大学出版社, 2008.
[4] 王宁侠. 机械设计[M]. 西安: 西安电子科技大学出版社,2008.
[5] 吴慎山,等. 智能建筑防火灭火及逃生系统的研究与实现[J]. 河南师范大学学院(自然科学版),2010,(04):68-71.
Design of Self-help High-rise Escape System on Basis of Principle of Friction
ZHOU Chang-hai, YE Fu-min,ZHOU Qian-gui,XUE Wei
(Jiangsu University of Science and Technology,Zhenjiang 212003,China)
Abstract:This paper proposes that the principle of bicycle friction brake is used to design a self-help slow-descending escape system, which is controlled by the frictional force. In this system, additional weight (added friction) and lever principle ect. are used to control its speed without any help. This apparatus can be used to help people escape from high-rise fires, explosions ect. and it is perfectly chosen for the residents living in high-rise building.
Keywords:high-rise; slow-descending escape apparatus; friction; design
收稿日期:2014-12-10
中图分类号:TH117.1
文献标志码:B
文章编号:1671-5276(2015)03-0083-02
作者简介:周长海(1990-),男,江苏沛县人,研究方向为机械设计制造及自动化。