基于多特征融合的低空风切变类型识别
2015-12-23蒋立辉杨浩广庄子波熊兴隆
蒋立辉,杨浩广,庄子波,熊兴隆
(1.中国民航大学 天津市智能信号与图像处理重点实验室,天津300300;2.中国民航大学 民航气象研究所,天津300300)
0 引 言
不同类型的低空风切变对飞机飞行的影响有较大差异,如下击暴流会使飞机突然下降,逆风切变会导致飞机冲出跑道等。因此,正确识别各种低空风切变类型能为飞行员及时应对突发情况提供帮助,对飞行安全具有重大意义。多普勒激光雷达因其高精度、高分辨率的特点,应用于对晴天低空风切变的探测和预警[1,2]。利用激光雷达探测获得的低空风切变径向速度数据,通过图像处理的方法提取雷达图像特征并进行类型识别这一新思想得到了尝试。高志光等[3]采用Hu矩和灰度共生矩阵提取低空风切变图像的组合特征进行识别,但Hu矩和灰度共生矩阵提取的都为全局特征,对于局部信息不能很好得描述;张春庆等[4]研究了小波变换的方法,它可以同时提取低空风切变图像的全局和局部的纹理特征,但该算法不具旋转不变性,并不能很好表达雷达图像信息。上述两者都是对单仰角扫描得到激光雷达图像进行识别,不能反映不同角度下低空风切变现象,导致对低空风切变的研究不够充分。
为了能够更好的对低空风切变进行研究,本文以多仰角、多方位、多距离的扫描方式获取不同类型低空风切变的样本图像,保证了样本库的完整性,进而提出一种将Zernike全局矩与LBP 局部纹理算子相融合,并通过PCA的方法提取优化特征集用于识别的算法。该算法不仅具有对旋转关系不敏感的优点,且结合了全局特征和局部特征,保证了提取特征的全面性,有利于较大程度地识别低空风切变。本文进行了两组对比实验以验证该算法的有效性。
1 样本图像的获取
在低空风切变中,比较有代表性的4种是微下击暴流、低空急流、顺逆风和侧风。下击暴流是从雷暴云或对流云下方向下冲出,到近地面处水平辐散出流的气流,当水平辐散尺度小于4km 时为微下击暴流;低空急流是在大气低层出现的狭窄强风带;顺逆风是两种不同风向的气流在低空中相遇的现象;侧风为与某一方向或行进方向有正交分量的风。
由于难以获取上述4种低空风切变真实数据,本文根据它们的特点对其采取数值仿真方法获取。首先,利用大气流体软件FLUENT 对4种低空风切变进行模拟仿真,建立三维模型,具体过程参照文献 [5],4种风场的尺寸均为8000×8000×2000;然后,对风场模型模拟激光雷达的扫描方法——速度方位法 (VAD)进行扫描,获得径向速度;最后,将扫描得到的数据转换成二维图像,构成样本库。
现实环境中,低空风切变可能发生于机场的各个方位,为了能够保证样本图像的真实性及完整性,本文把三维风场模型的中心设为坐标系原点,通过调整激光雷达来进行扫描,扫描方式为:
(1)激光雷达分别置于距离原点0~7000m 不同的点,包含了激光雷达在风场模型内外的扫描;
(2)香港国际机场扫描仰角最高为4.5°,本文范围设为0.5°~4.5°,扫描间距0.5°;
(3)方位角范围设为0°~360°,每4°取一点。
图1为对获取的扫描数据处理后得到的4种低空风切变的部分样本图像。
在图1中,红黄色表示径向风速为正值,蓝绿色为负值。样本图像中,由于对风场扫描条件的不同,各类低空风切变图像之间也有较大的差异,当同距离同仰角扫描时,获取的样本会发生旋转,而远距离高仰角或在风场模型内扫描时,获取的信息会发生缺失。因此,采用具有旋转不变性的特征提取方法提取全局特征和局部特征对低空风切变进行识别。
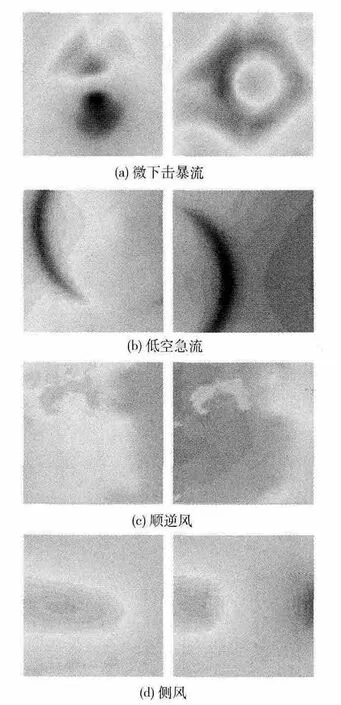
图1 4种低空风切变度雷达图像
2 特征提取
2.1 Zernike矩
Zernike矩[6,7]是基于复数域Zernike多项式提出的一组具有旋转不变性的正交矩,能够构造图像的任意高阶矩,具有信息表达冗余小、鲁棒性好等特点,可以很好的表达和描述图像。
Zernike多项式定义在单位圆 (x2+y2≤1)内,并构成具有完备性的复数正交函数集 {Vnm(x,y)}。Vnm(x,y)的表达式为

式中:n——正整数或零,m——正或负整数,且必须满足n-|m|=even|,|m|≤n。ρ——原点到点 (x,y)的矢量长度,θ——矢量ρ与x轴在逆时针方向上的夹角,Rnm(ρ)——点(x,y)处的实值径向多项式,其表达式为

图像的Zernike矩是指图像函数f(x,y)在正交多项式 {Vnm(x,y)}上的投影。重复率为m 的n 阶Zernike矩定义为

式中:*——取共轭。
在数字图像域,Zernike矩的表达式如下

计算图像的Zernike矩时,应将图像的中心作为原点,并将所有的像素点映射到单位圆内,单位圆外的点不做计算。最终把求得的Znm的幅值|Znm|作为识别时的特征。
2.2 局部二值模式 (LBP)
局部二值模式LBP[8,9]是一种灰度范围内的局部纹理描述方法,广泛应用于特征提取方面,具有鲁棒性好,计算速度快等特点。最初LBP算子定义为3×3的窗口,基本思想是以其中心像素的灰度值为阈值与其邻域像素进行比较,用得到的二进制码来表示其纹理特征。编码方式如图2所示。
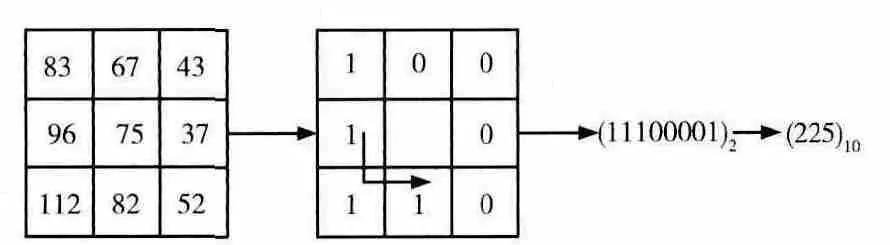
图2 LBP算子编码方式
为了获得任意尺度的纹理特征,Ojala等将其扩展到了圆形邻域,并用线性插值方法计算那些没有落入像素位置的像素点。其表达式为
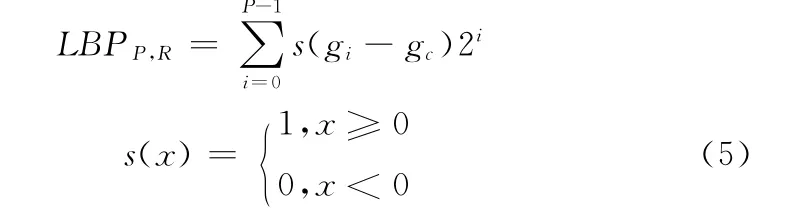
式中:P——邻域中包含的像素个数,R——邻域半径,gi(i=0,1,…,P-1)——对应邻域的像素值。不同 (P,R)值对应不同的LBP 算子,图3给出了3种不同的LBP算子。
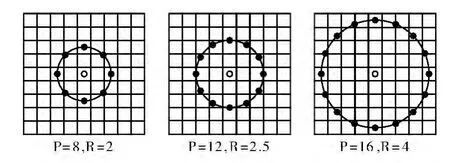
图3 3种LBP算子
为了使LBP算子具有旋转不变性,并且具有较强描述能力,Ojala等提出了旋转不变统一LBP模式,它是综合旋转不变LBP模式和统一LBP模式得到的。
旋转不变LBP模式为通过不断旋转圆形邻域获得一系列的LBP值,取其最小值作为该邻域的LBP值,计算公式如下

统一LBP模式的特征为对应的二进制串中0、1变换次数小于两次,其表达式为

满足U≤2的所有模式均为统一模式。实验结果表明,统一模式不仅可以描述绝大部分的纹理信息,而且具有较强的分类能力。
则旋转不变统一LBP模式的表达式为
该模式的LBP值都可以通过统计二值编码中l的个数得到,而非此模式的LBP值均等于P+1。
本文采用旋转不变统一模式来获取低空风切变图像的局部纹理特征。图4为图1中4种低空风切变第一幅图像经过旋转不变统一LBP变换后得到的图像。图像通过LBP算子运算后,统计其直方图信息作为提取特征用于识别。
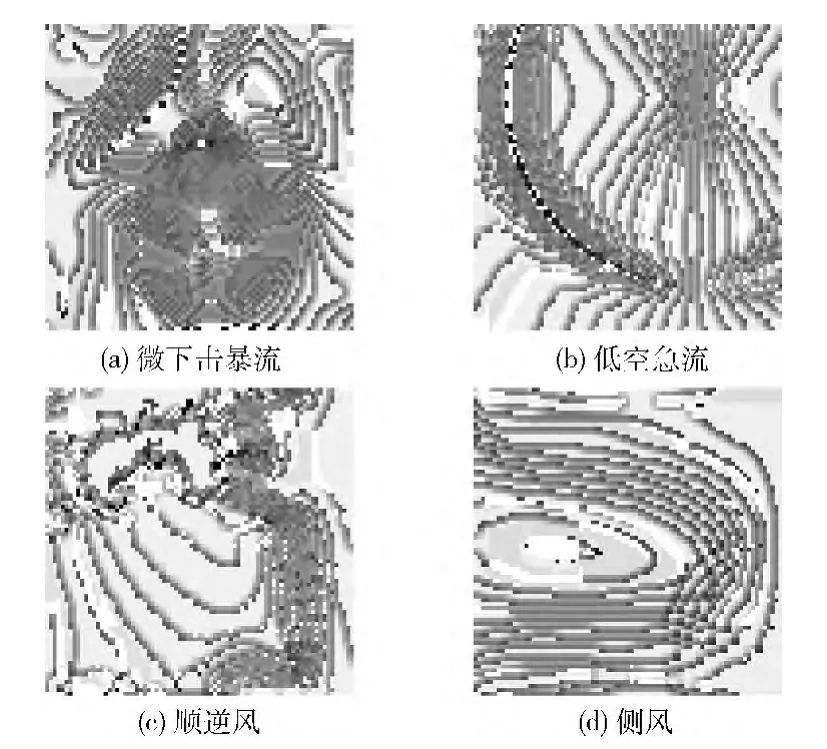
图4 LBP编码图像
2.3 特征融合
经过Zernike矩和LBP 算子提取特征后,由于各自提取的特征值范围不同,需要对各特征向量进行归一化,然后将归一化特征向量串联起来构成组合特征。但在组合特征中,存在无效和冗余的信息,采用基于K-L 变换的主成份分析PCA[10,11]方法,提取组合特征中的有效成分和降低维数,提高识别效率。
主成份分析PCA 的一般步骤为:
(1)设样本图像特征向量X 为P 个n维向量,记X=(x1,x2,x3,…,xp),则X 的协方差矩阵为

这里的“梵书”究竟指哪一部书,已不可考。然从其所引梵书说:“日宫一树而有鸡王栖其上,彼鸣则天下鸡皆鸣。”可知由于鸡有“知时”“报晓”的功能,故可以常住日宫。

(3)将样本图像与待测图像特征向量映射到特征空间yi=ΦTxi,这样就达到了将n 维向量降到m 维的目的,最后把获得优化特征进入分类器进行分类。
3 k近邻法进行识别
实验获得Zernike矩和LBP的融合特征后,可以通过k近邻分类器进行分类。
k近邻[12]算法是一种基于距离度量的分类算法,广泛用于分类问题,其基本思想为:计算待测样xp与已知类别样本xi之间的距离,找到距离最近的k 个近邻,然后根据这些近邻中出现最多的样本类别个数来判定新样本的类别。
假设有n个类别w1,w2,…,wn,每个类别的已知样本数为Ni个,求待测样本的k个近邻,近邻通过欧氏距离计算,表达式如下

式中:xli的角标i 表示为wi类,l表示为wi类样本中第l个。
统计k个近邻中每个类别样本的个数,判定xp的类别,判定函数为

式中:Ti(dj)——dj是否属于wi类。若属于,为1;否则,为0。
则待测样本xp属于近邻中类别个数最多的wi类。对于k值的选择一般事先确定,本实验中k取3。
4 实 验
4.1 样本库建立
实验所用样本图像是通过对建立的4种低空风切变模型模拟激光雷达扫描方式扫描得到。样本库中每类低空风切变样本选取60 幅进行实验,包含了扫描方式中各个距离、角度、方位的扫描图像,每幅图像大小为80×80 像素。实验过程中,每类低空风切变图像随机选取15幅作为训练样本,其它45 幅图像作为测试样本,实验重复进行60次。
4.2 特征参数选择
实验过程中,Zernike矩阶数n的选取及LBP算子邻域像素点数P 和邻域半径R 的选取对于识别率也有一定的影响。为了选取合适特征进行实验,对于Zernike矩和LBP算子,实验选取了不同的阶数n和不同的P 值、R 值分别计算了识别率。表1显示了不同参数设置下Zernike矩和LBP算子对4种低空风切变图像进行60次实验的平均识别率。
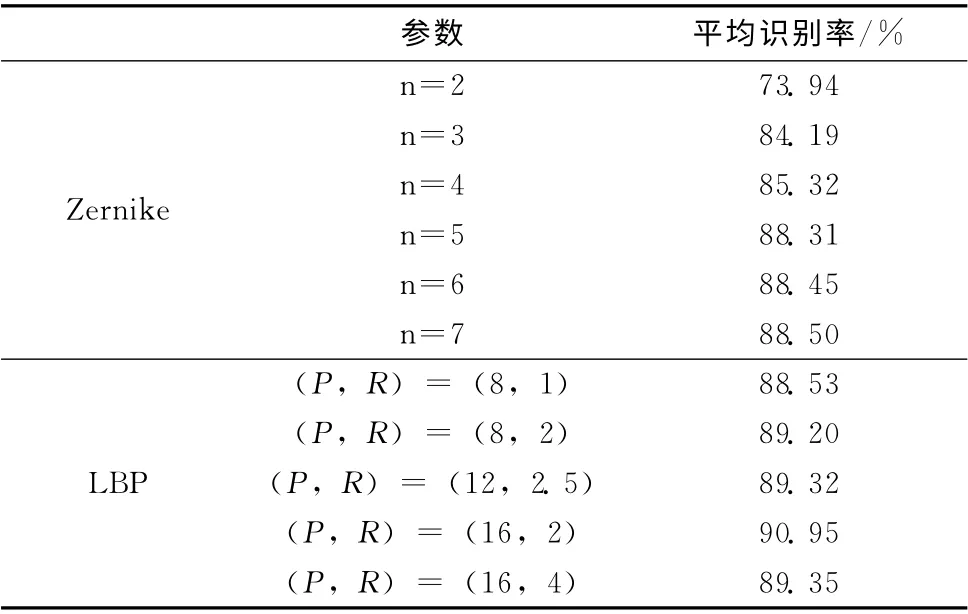
表1 不同参数的识别率
由表1可知,当Zernike矩的阶数n大于5之后,平均识别率基本保持不变,考虑计算复杂度问题,选取5阶12维特征作为形状特征;LBP 算子识别率相差不大,但当(P,R)= (16,2)时,识别最高,所以选取邻域像素点数P 为16 和邻域半径R 为2 的LBP 算子提取18维纹理特征。
4.3 实验结果分析
(1)为验证本文融合算法Zernike+LBP+PCA,将其和单独使用Zernike矩、LBP及两特征串联融合但未降维的算法Zernike+LBP进行比较,识别率曲线如图5所示。
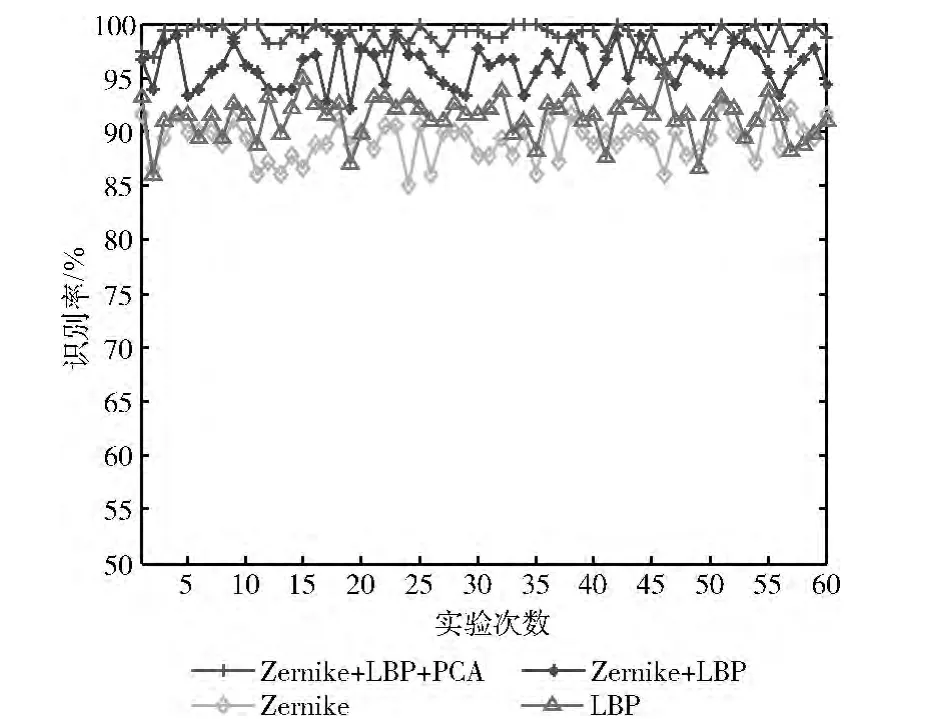
图5 4种算法识别率曲线
在图5中,4条曲线分别表示本文融合算法Zernike+LBP+PCA、Zernike+LBP、单独使用Zernike矩和LBP的识别率曲线。
由表2可知,本文提出的算法与其它3 种算法相比,平均识别率最高。对于微下击暴流和侧风,Zernike矩的识别率较高,这是因为这两种低空风切变扫描过程中能够得到比较全面的信息,全局特征更加明显;而对于低空急流和顺逆风,LBP的识别率较高,这是由于对这两种低空风切变扫描时,信息容易缺失,则局部特征的提取显得更为重要;将两种方法结合后,识别效果明显改善,但是发现识别率曲线起伏波动较大,并不稳定,通过PCA 提取有效特征后,识别率和稳定度都有所提升,最高识别率可达到100%。
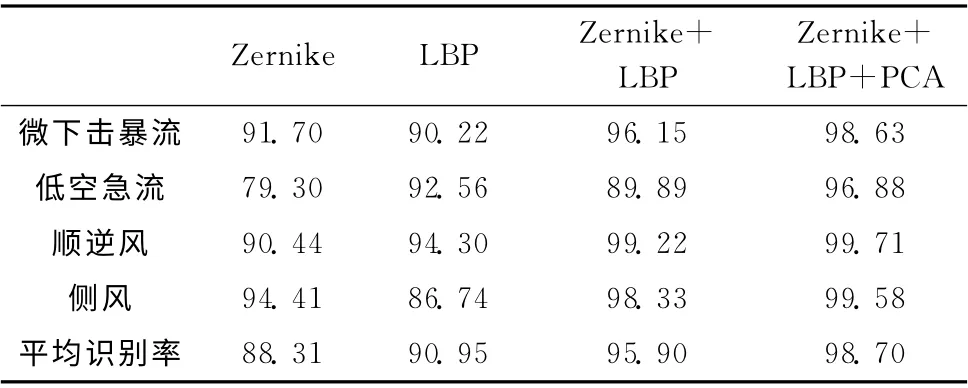
表2 4种算法识别率/%
(2)本文还将本文融合算法与文献 [3]中Hu矩和灰度共生矩阵 (GLCM)结合算法及文献 [4]中小波纹理算法进行了比较,识别率曲线如图6所示。

图6 3种算法识别率曲线
在图6中,3条曲线分别表示本文融合算法、Hu矩+GLCM 结合算法和小波纹理算法的识别率曲线。
由于样本库中存在缺失信息图像和旋转图像,Hu+GLCM 算法和小波纹理算法并不能很好的识别低空风切变图像,由表3 可知,两者的平均识别率分别为89.42%,85.23%,而运用本文算法进行实验,平均识别率达到了98.70%,明显优于前两种算法,且由图6可以观测到本文算法的识别率曲线起伏小,鲁棒性更好。

表3 3种算法平均识别率/%
5 结束语
本文针对多方位、多仰角和不同扫描距离情况下获取的4种低空风切变样本图像,研究了一种多种特征融合的识别算法。该算法具有旋转不变性,且兼顾了全局和局部特性,实验结果表明,与其它多种算法相比,采用多特征融合算法的识别效果最好,验证了该算法的有效性,可以成功用于低空风切变类型识别中。但本实验所用数据为模拟仿真得到,利用该方法对真实数据下的低空风切变图像进行识别,将是下一步研究的重点。
[1]WANG Qingmei,GUO Lile.Development of lidar in detection of low altitude wind shear[J].Laser and Infrared,2012,42(12):1324-1328 (in Chinese).[王青梅,郭丽乐.激光雷达在机场低空风切变探测中的应用 [J].激光与红外,2012,42(12):1324-1328.]
[2]Chan PW,Hon KK,Shin DK.Combined use of headwind ramps and gradients based on LIDAR data in the alerting of lowlevel windshear/turbulence [J].Meteorologische Zeitschrift,2011,20 (6):661-670.
[3]JIANG Lihui,GAO Zhiguang,XIONG Xinglong,et al.Study on type recognition of low attitude wind shear based on lidar image processing [J].Infrared and Laser Engineering,2012,41 (12):3410-3415 (in Chinese). [蒋立辉,高志光,熊兴隆,等.基于激光雷达图像处理的低空风切变类型识别研究 [J].红外与激光工程,2012,41 (12):3410-3415.]
[4]JIANG Lihui,ZHANG Chunqing,ZHUANG Zibo,et al.Study on type recognition of low-level wind shear based on radar image simulation [J].Laser and Infrared,2013,43 (3):334-338 (in Chinese).[蒋立辉,张春庆,庄子波,等.基于仿真雷达图像的低空风切变类型识别研究 [J].激光与红外,2013,43 (3):334-338.]
[5]JIANG Lihui,TIAN Baiquan,XIONG Xinglong,et al.Numerical simulations of low attitude wind shear based on Doppler lidar[J].Infrared and Laser Engineering,2012,41 (7):1761-1766 (in Chinese).[蒋立辉,田百全,熊兴隆,等.基于多普勒激光雷达低空风切变的数值仿真 [J].红外与激光工程,2012,41 (7):1761-1766.]
[6]Wang W,John E Mottershead,Cristinel Mares.Mode-shape recognition and finite element model updating using Zernike moment descriptor[J].Mechanical System and Signal Processing,2009,23 (7):2088-2112.
[7]Karbhari VK,Prapti DD,Shriniwas VC.Zernike moment feature extraction for handwritten Devanagari compound character recognition [C]//Science and Information Conference,2013:459-466
[8]Guo ZH,Zhang L,Zhang D.Rotation invariant texture classification using LBP variance (LBPV)with global matching[J].Pattern Recognit,2010,43 (3):706-719.
[9]Zhang B,Gao Y.Local derivative pattern versus local binary pattern:Face recognition with high order local pattern descriptor[J].IEEE Transactions on Image Processing,2010,19(2):533-544.
[10]Song F,Guo Z,Mei D.Feature selection using principal component analysis [C]//International Conference on System Science,Engineering Design and Manufacturing Informatization,2010:27-30.
[11]Han Z,Zhu J,Zhang B.Study of defect feature dimension reduction based on principal component analysis [C]//2nd International Conference on Computer Science and Network Technology,2012:1367-1371.
[12]Anjali Ganesh Jivani.The novel k-nearest neighbor algorithm[C]//International Conference on Computer Communication and Informatics,2013:1-4.
