手机与ZigBee结合的城市停车系统
2015-12-23舒华文
舒华文,周 鹏
(1.中石化胜利油田有限公司 滨南采油厂,山东 滨州256606;2.中国石油大学 (华东)信息与控制工程学院,山东 青岛266580)
0 引 言
现有城市智能停车系统采用的基本架构类似,大致由信息采集、信息传输、中央管理和信息发布4个子系统组成[1-3]。信息采集子系统负责采集车位当前是否被占用、驶入及驶出停车场的车辆数目等相关数据;信息传输子系统用于将采集到的信息传输给中央管理子系统,以及将中央管理子系统发布的信息传输给各类显示装置,通信方式多采用GPRS、CDMA、3G 等移动通信方式;中央管理子系统是整个架构的核心,它对信息采集子系统送来的信息经过综合处理后,再将这些信息通过信息传输子系统及时输送给各类显示装置[4,5]。
上述架构的共同点是需要建设并维护一个城市级的管理控制中心,导致系统的建设和运营成本较高。信息采集、信息发布两个子系统与管理控制中心间的通信多采用GPRS、CDMA、3G 等方式,需由运营部门长期缴纳不菲的移动通信费用。此外,驾驶者在驾驶过程中一直只是被动接受系统所提供的信息,缺乏与系统的主动交互。
为解决上述不足,本文提出一种用户智能手机与停车场ZigBee网络相结合的架构。
1 系统架构
系统由部署在各停车场的ZigBee网络和用户车辆上随身携带的智能手机两大类部分组成。每个停车场所部署的ZigBee网络,又由一个中心结点、若干个路由器结点以及更多数量的终端结点组成。其中的终端结点又包括全功能结点和精简功能结点两种。精简功能结点的优点是成本低,全功能终端结点的优点是通信范围内的两个结点间可直接进行点到点的通信。每个终端结点又都分别连接一个车位状态检测传感器。图1给出了系统的总体架构。
整个系统的大致工作流程是:
(1)所有终端结点定期采集车位状态检测传感器获取的车位状态信息。当车位状态发生变化时,通过路由器结点传给中心结点并在其嵌入式数据库中进行存储。
(2)当汽车行驶至某地时,用户利用语音输入等方式提出寻找车位的请求,智能手机软件根据车辆的当前位置确定最优的停车场。
(3)智能手机软件与最优停车场Zigbee网络中的中心结点进行GPRS/CDMA/3G 等方式的通信,中心结点查询当前的车位状态数据库,运行确定最优停车位的算法,将最优车位的信息反馈给智能手机。
(4)智能手机进行路径规划,将车辆引导至最优车位。
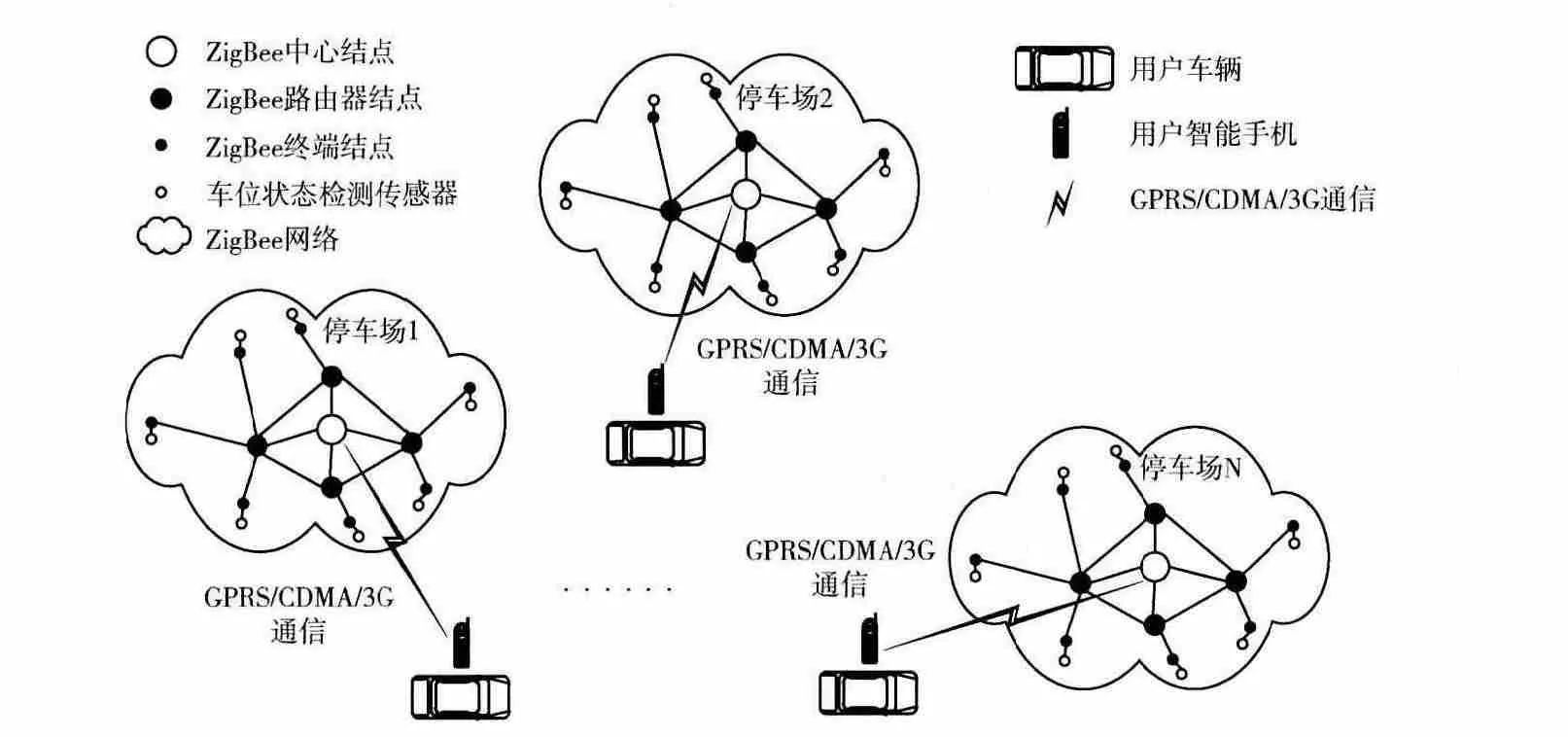
图1 系统的总体架构
在上述架构中,运营部门无需建设城市控制中心,也无需长期缴纳停车场到城市控制中心,以及城市控制中心到各级显示装置的移动通信费用。只有用户发出停车请求时,停车场ZigBee网络的中心结点才和用户进行GPRS/CDMA/3G 等方式的通信,所产生的少量费用由用户进行付费。此外,在上述架构中,用户通过自己的智能手机可与系统进行良好的交互。
2 硬件设计
ZigBee网络中包括中心结点、路由器、终端三类结点。三类结点的电路中都应包括ZigBee处理器及其外围电路,以及ZigBee射频功放、USB转串口、JTAG 调试等模块。
终端结点需配备车位状态检测传感器。考虑到可能缺乏供电条件或布线困难、布线量大等原因,终端结点设计为采用电池供电,因此应配备电量监视模块以便在需要时及时更换电池。
因为需要维护车位状态数据库,中心结点应额外配备嵌入式处理器及其外围电路,当数据量较大时还应外接E2PROM。为和用户手机通信,中心结点应配备GPRS/CDMA/3G 通信模块。对于路边停车区域,考虑到可能缺乏供电条件,对于路由器结点和中心结点也应支持电池供电,同时配备电量监视模块。另外,如果希望不通过上位机就可直接操作中心结点,还需配备触摸屏。
图2给出了终端结点的硬件,与路由器结点类似,只是无需连接车位状态检测传感器。
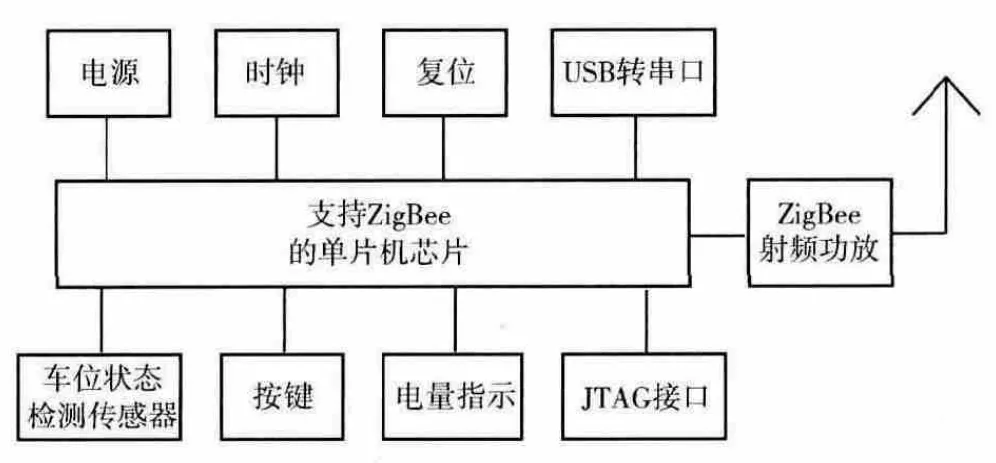
图2 终端结点的硬件
中心结点的硬件电路包括嵌入式处理器及其外围电路、ZigBee处理器及其外围电路两部分。这两部分之间可通过串口进行通信。
图3给出了中心结点嵌入式处理器部分的硬件。中心结点ZigBee处理器部分的硬件与图2类似,只是无需连接车位状态检测传感器。
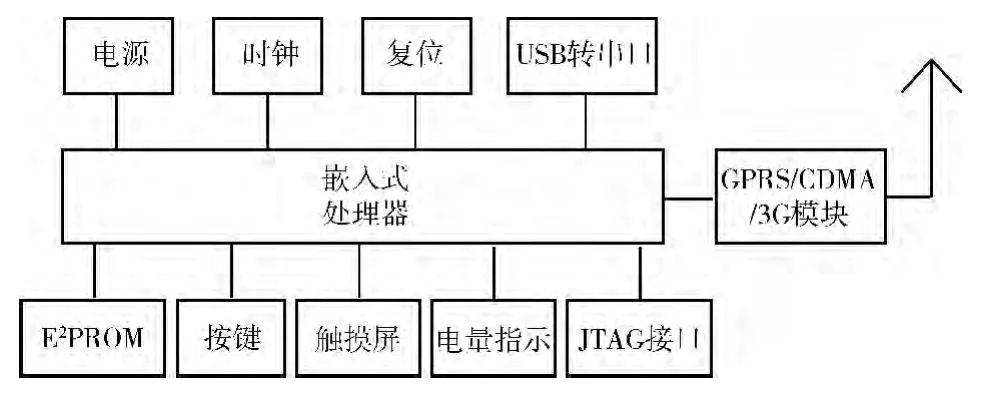
图3 中心结点嵌入式处理器部分的硬件
车位状态检测传感器的选取和低功耗设计是系统硬件设计的两大关键。
目前常用的车位检测方法有超声波感应技术[6]、红外探测技术、感应线圈技术[7]、视频检测技术[8]、地磁检测技术等[9]。其中,超声波感应技术通常需要在车位上方安装传感器,一般仅适用于部分室内停车场,且成本较高;红外探测技术相对成熟,但比较容易会受到光源、热源等的干扰而引起误判;感应线圈技术的检测精度较高,可靠性好,但安装维护复杂,会对路面造成破坏;视频检测技术直观可靠,但数据量大,检测的实时性差,特别是会受到灰尘、光线不足、气候条件差的影响;地磁检测技术是基于磁阻传感器的车位检测技术,具有尺寸小、安装方便、对非铁磁性物体无反应、可靠性高等特点,目前受到国内外的广泛重视。综上分析,车位状态检测传感器选用霍尼韦尔公司的HMC5883L地磁传感器。
为保证系统的低功耗,主要芯片的选型非常关键。Zig-Bee处理器芯片选用TI公司的CC2530芯片。CC2530具有Idle、PM1、PM2、PM3等多种功率控制模式,其电流消耗可分别低至24 mA、0.2mA、1μA、0.4μA[10]。ZigBee射频功放芯片选用TI公司的CC2591芯片。CC2591在将输出功率提高22dBm、接收灵敏度提高6dBm 的同时,在Idle、PM1、PM2、PM3模式下增加的消耗电流分别不超过4mA、0.05 mA、1μA、0.05μA[10]。中心结点的微控制器选用恩智浦公司的LPC11C14芯片。该芯片基于Cortex-M0内核,在功率控制方面具有睡眠模式、深度睡眠模式和深度掉电模式等,其电流消耗可分别低至2mA、6μA、240nA[11]。
3 软件及算法设计
3.1 车位数据采集过程
各停车场ZigBee网络的三类结点平时相互配合,对停车场内所有车位的状态进行定时采集。为降低功耗,终端结点定时进行休眠。另外,只有当车位状态发生变化时,终端结点才对外发送状态变化的信息,进一步降低了功耗。图4给出了车位数据采集过程的软件流程。
3.2 用户停车申请及处理过程
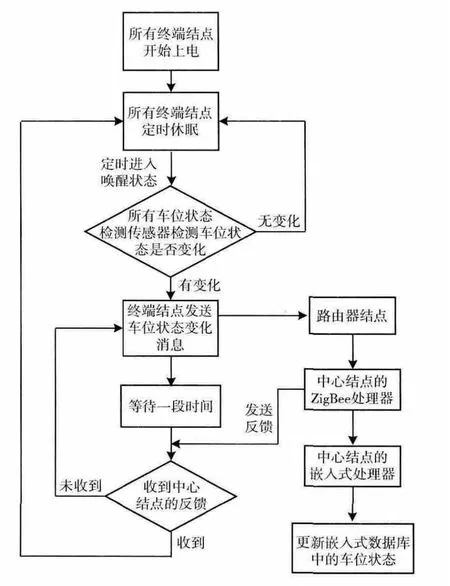
图4 车位数据采集过程的软件流程
当用户有停车需求时,通过语音等方式向智能手机发出停车申请,手机软件根据用户的当前位置计算最优停车场,接下来与该停车场ZigBee网络的中心结点进行通信,中心结点计算最优车位信息后反馈给用户手机,最后手机软件将车辆引导至目的车位。图5给出了用户停车申请及处理过程的软件流程。
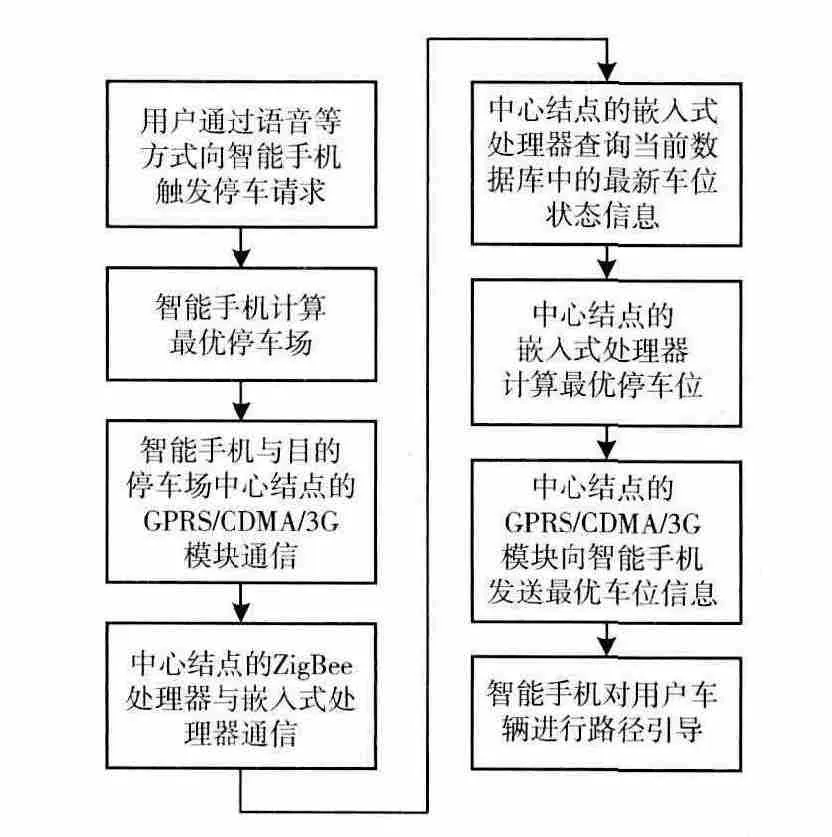
图5 用户停车申请及处理过程的软件流程
在上述处理过程中,其中的技术关键是最优停车场与最优停车位的确定,下面介绍所设计的算法。
3.3 停车场、停车位寻优算法
有多种因素会影响人们对停车场及停车位的选择。对于停车场的选择,比较常见的因素有:收费价格的高低、车辆当前位置到停车场的行驶距离、停车场到目的地的距离、停车场的规模等。对于停车位的选择,比较常见的因素有:车位到某步行出口的距离、从车辆入口到车位的距离、车位距停车场出口距离、左右两侧车位是否已被占用等。
由于有多项因素会影响到人们对停车场及停车位的选择,因此该问题属于多目标决策中的多属性决策问题。所谓多属性决策,是指在考虑多个属性的情况下,在多个备选方案中选择最优方案或对方案进行排序的决策问题。
在多属性决策问题中,各属性权重的确定是其中的关键。比较常见的方法可分为主观赋权法和客观赋权法两类,但这两类方法都有一定不足。为此,在已有文献方法[12]的基础上进行了改进,设计了一种基于熵权的多属性决策方法。按照熵的思想,人们在决策中获得的信息量的多少,是决定决策合理性的重要因素。按照信息论中的基本定理,均匀分布情况下的熵最大,但若各种方案在某指标上的取值完全相同时,该指标对决策者未提供任何有用信息。换而言之,熵值越大,提供给决策者的有价值信息量越小。由此,在m 个评价指标、n个待评价方案的(m,n)问题中,定义熵权为

式中:ωi——第i个指标的熵权,Hi——第i个指标的归一化熵值。Hi定义为

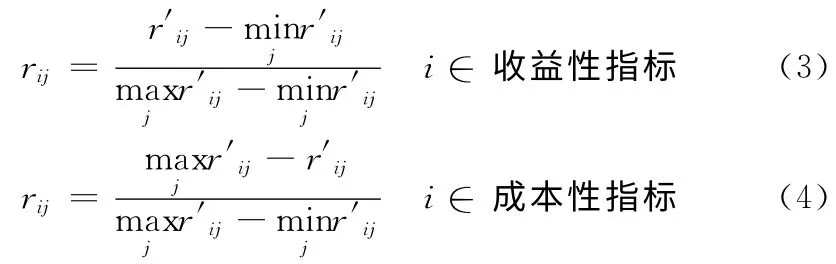
式中:r′ij为原始评价矩阵中的元素。经过上述归一化后,各方案在某指标上的评价值中,收益性指标中的最小值和最大值分别被归一化为0和1,成本性指标中的最小值和最大值分别被归一化为1和0。归一化后,rij值越大,则对应方案在该指标上越有利。
从熵权ωi的上述定义中可看出,当归一化熵值Hi因各方案在指标i的评价值相同因而取得最大值1时,熵权值为0,这也意味着该指标未向决策者提供任何有用信息。另一方面,当各方案在指标i的评价值相差较大时,Hi较小,ωi较大,这说明各方案在该指标的评价值上有明显差异,该指标应重点考虑。为此,对归一化后的评价矩阵,每行用ωi进行加权后再进行决策处理。这样就保证了在各方案评价值上差异越大的指标越受到重视。
以停车位的选择为例,为具体实现上述算法,在嵌入式数据库中设计了如表1所示的车位信息表。
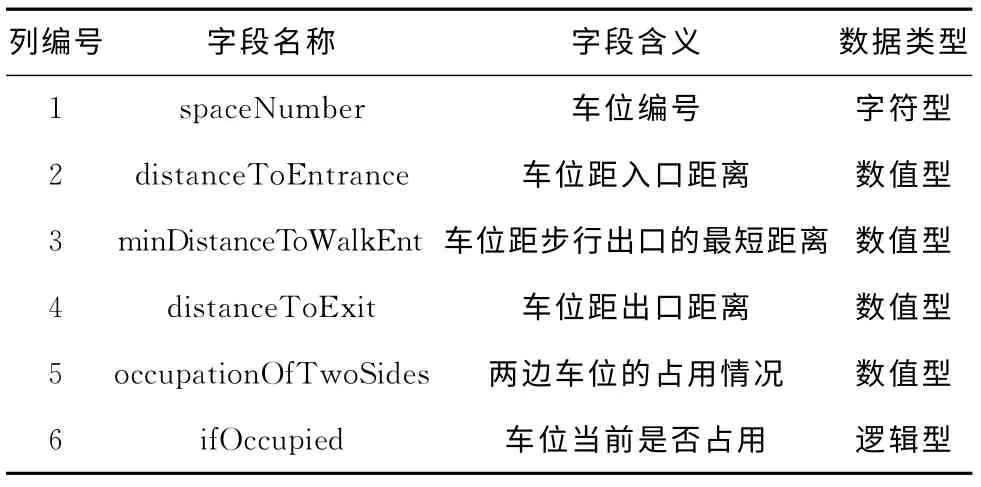
表1 车位信息表的表结构
在表1中,“两边车位的占用情况”和 “车位当前是否占用”两列的取值会根据车位及其周边车位的实际占用情况,随时间发生变化。另几列的值可在初始化时一次性填好。
当需要进行停车位寻优时,停车场ZigBee网络中心结点的嵌入式处理器查询数据库中各车位的当前信息,先排除掉已被占用的车位。接下来,对于所有空闲车位,按照式 (1)~式 (4),计算表1中编号为2、3、4、5 四列的熵权值。利用所得到的四个熵权值,对所有空闲车位2、3、4、5四列的数据进行加权,之后就可利用传统的多目标决策方法确定最优停车位。
4 实物展示及测试结果
4.1 实物展示
图6为所开发电路的实物展示图。其中图6 (a)为终端结点,图6 (b)为路由器结点,图6 (c)为中心结点。图 (c)中,左侧的电路板是LPC11C14板,右侧的电路板是CC2530板。其中的部分电路采用了商品化的电路模块。
4.2 测试结果
在某露天停车位进行了车位状态检测传感器的测试。根据该车位所在停车场的地理朝向,采集时将传感器的X轴正方向朝正北,Y 轴的正方向朝正西。图7中,图7 (a)为有车时的场景,图7 (b)为无车时的场景。对HMC5883L返回的磁场数据,在有车和无车的情况下,分别进行了10次测试。在10次测试中,有车和无车时Z 轴的磁场强度差都在500毫高斯以上,可以确保对有车和无车两种情况准确区分。
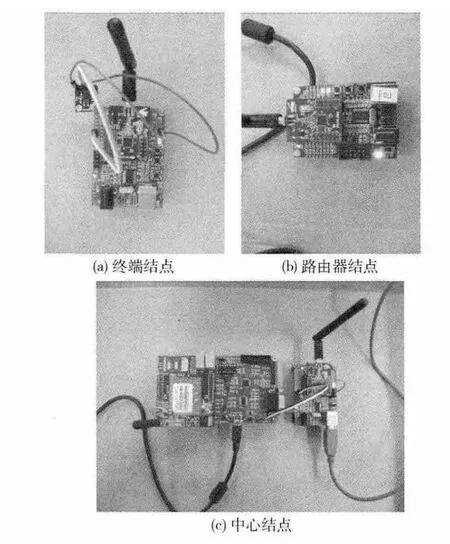
图6 系统电路实物展示
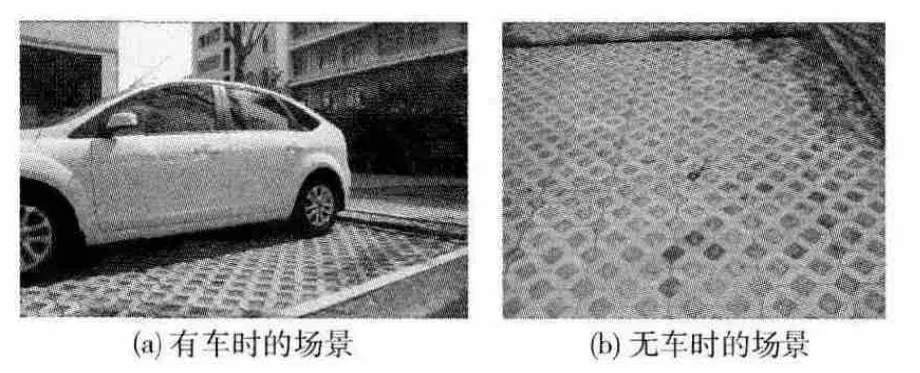
图7 车位状态检测传感器的测试
为便于测试,在系统的嵌入式数据库中事先存入表1中所列的各项数据,模拟如图8所示的车位分布情况。在该图中,有A2、A8、B8、B15、C3、C11、D4、E1、F11、G4、H4、H5共12个空闲车位。利用3.3节所设计的算法进行计算后,如图9所示,智能手机选择了H4车位作为最优车位。所得结果符合人们的习惯。首先,该车位与停车场入口和出口间的距离都适中。其次该车位离电梯非常近。最后该车位旁边还有1个空闲车位,空间相对宽裕。
5 结束语
针对现有城市智能停车系统的不足,提出一种用户智能手机与停车场ZigBee网络相结合的新型架构。利用该架构,城市智能停车系统的运营者无需建设和维护城市控制中心,也无需长期缴纳移动通信费用。此外,还实现了用户通过自己的手机与系统良好交互。
给出了系统的硬件图、软件流程图、停车场和停车位的寻优算法以及系统测试结果。测试结果表明,所选用的HMC5883L磁场传感器用于车位检测准确可靠,所设计的停车场、停车位寻优算法的运行结果符合人们的生活习惯,所开发的ZigBee网络与智能手机软件之间能够良好地通信,同时也验证了所提出架构的可行性。
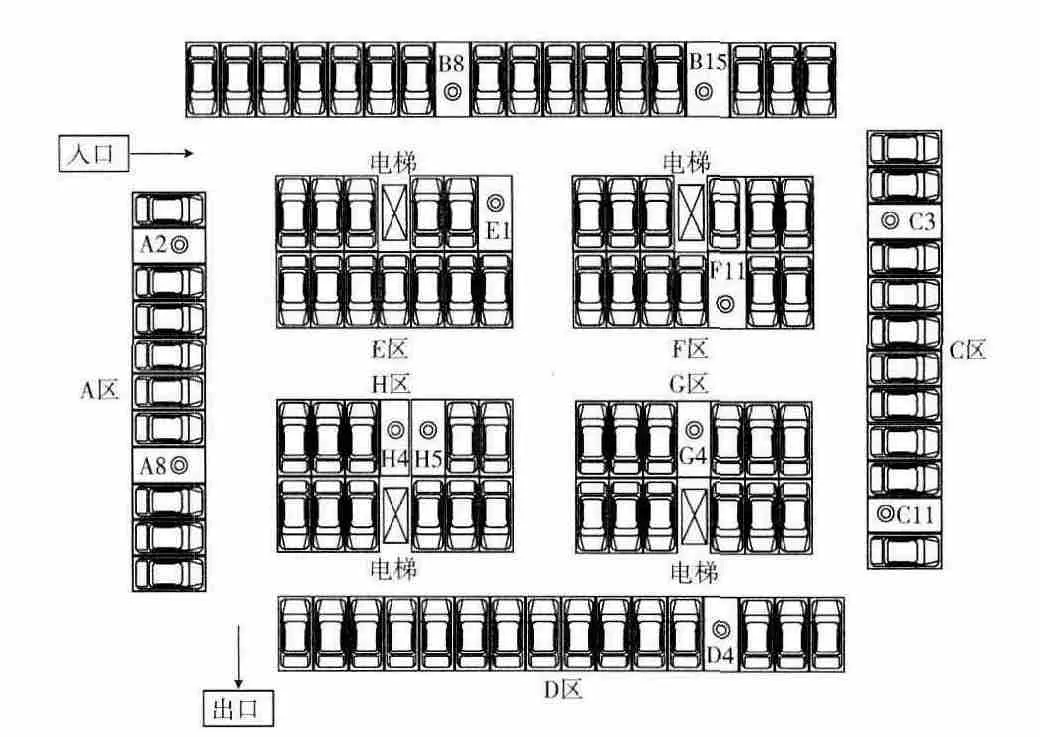
图8 停车场车位分布模拟
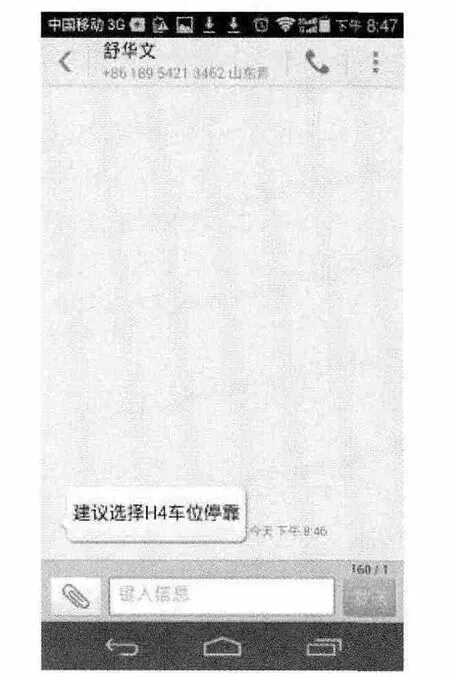
图9 智能手机上所显示的车位优化计算结果
[1]Wu E H K,Sahoo J,Chi-Yun L,et al.Agile urban parking recommendation service for intelligent vehicular guiding system[J].IEEE Intelligent Transportation Systems Magazine,2014,6 (1):35-49.
[2]Tubaishat M,Zhuang P,Qi Q,et al.Wireless sensor networks in intelligent transportation systems[J].Wireless Communications and Mobile Computing,2010,9 (3):287-302.
[3]SUN Hao,CHEN Yongrui,XU Xuzhu,et al.Underground parking information system based on wireless sensor network[J].Jounrnal of University of Chinese Academy of Sciences,2013,30 (5):664-670 (in Chinese). [孙昊,陈永锐,许旭柱,等.基于无线传感器网络的地下停车场诱导信息系统[J].中国科学院大学学报,2013,30 (5):664-670.]
[4]SHI Wenzao,MAO Zhengyuan.A review of parking guidance information system [J].Urban Public Transport,2012 (9):37-41 (in Chinese).[施文灶,毛政元.停车诱导信息系统研究综述 [J].城市公共交通,2012 (9):37-41.]
[5]XU Lifeng.Applying wireless sensor network technology in traffic information acquisition system [J].Computer Applications and Software,2012,29 (4):236-241 (in Chinese).[徐立锋.基于无线传感器网络技术在交通信息采集系统的应用 [J].计算机应用与软件,2012,29 (4):236-241.]
[6]LIU Weibo.Ultrasonic detection system for parking spaces based on ZigBee wireless sensor network [D].Xi’an:Chang’an University,2011 (in Chinese).[刘维波.基于Zigbee无线传感网络的超声波车位检测系统[D].西安:长安大学,2011.]
[7]XIA Faqin.Principle and implementation of vehicle detection by induction coil[D].Wuhan:Wuhan University of Science and Technology,2011 (in Chinese). [夏发钦.利用地感应线圈检测机动车辆的原理与实现 [D].武汉:武汉科技大学,2011.]
[8]LI Yucheng,YAN Juanli,WANG Mushu,et al.Approach for parking spaces detection based on video images [J].Com-puter Engineering and Design,2012,33 (1):282-285 (in Chinese).[李宇成,严娟莉,王目树,等.利用视频图像检测车位状态的方法 [J].计算机工程与设计,2012,33 (1):282-285.]
[9]HU Qiong.Research on application of AMR sensor for vehicle[D].Shanghai:East China University of Science and Technology,2011 (in Chinese).[胡琼.磁阻传感器在停车场车位检测中的应用 [D].上海:华东理工大学,2011.]
[10]JIANG Zhong,LIU Dan.ZigBee technology and practice tutorial-based on wireless sensor network technology using CC2530 [M].Beijing:Qinghua Press,2014 (in Chinese).[姜仲,刘丹.ZigBee技术与实训教程―基于CC2530的无线传感网技术 [M].北京:清华大学出版社,2014.]
[11]HAN Chunxian,LIU Xingjie,HAN Yanjun.Embedded system development and practice for ARM Cortex-M0 series[M].Beijing:Beihang University Press,2013 (in Chinese).[韩春贤,刘兴杰,韩艳君.ARM Cortex-M0嵌入式系统开发与实践 [M].北京:北京航空大学出版社,2013.]
[12]RUAN Lianfa,ZHENG Xiaoling.Regional multi target decision algorithm based on entropy weighting [J].Statistics and Decision,2013 (12):82-84 (in Chinese). [阮连法,郑晓玲.基于熵权法的区间多目标决策方法 [J].统计与决策,2013 (12):82-84.]
