射波刀技术现状与发展及其临床应用
2015-12-22胡立宏郑国宝
胡立宏,程 瑞,张 倩,郑国宝
射波刀技术现状与发展及其临床应用
胡立宏,程 瑞,张 倩,郑国宝
介绍了射波刀的组成、结构,从照射系统、影像引导、呼吸追踪技术、目标参考系4个方面阐述了射波刀的技术特点,重点分析了第四代射波刀(G4)较第三代射波刀(G3)所具有的技术优势,并通过具体临床应用实践,指出射波刀对于一些体积较小、手术困难、伽马刀和加速器难以治疗以及随呼吸运动的肿瘤病例有着良好的临床效果,是放射治疗的有力工具。
射波刀;技术优势;肿瘤
0 引言
1951年,瑞典神经外科医生Lekshell提出了立体定向放射外科(stereotactic radiosurgery,SRS)概念,并于1967年发明了治疗头部病变的伽马刀。1985年,Colombo等将经过改造的直线加速器用于立体定向放射治疗,发明了颅脑X刀[1-2]。1992年,美国斯坦福大学神经外科医生Adler发明了技术更先进的射波刀[3],并于2001年8月通过美国食品药品监督管理局(Food and Drug Administration,FDA)全身肿瘤放射治疗认证,将病变治疗范围拓展到全身。
1 射波刀技术现状
1.1 射波刀的组成
射波刀主要由6个部分组成[4-5](如图1所示):(1)由机械臂(manipulator)及直线加速器(linear accelerator)组成的机器人照射系统(robotic delivery sys tem);(2)由安装在治疗室天花板上的2部X线源和治疗床两侧90°正交的2部X线平板探测器(image detector)组成的靶区定位系统(targeting system);(3)治疗计划系统(treatment planning system);(4)治疗床(treatment couch);(5)红外线同步追踪摄像机(synchronycamera);(6)计算机网络集成与控制系统。
1.2 射波刀的技术特点
1.2.1 机器人照射系统灵活精准
机器人照射系统可产生6 MV治疗用X线且仅有150 kg的轻型直线加速器安装在可做6轴转动的机械臂上并随机械臂灵活地运动[6],机械臂重复定位精度为0.2 mm,保证了定位的精准度。在4.4 m× 5.5 m的机械臂活动范围内,不同半径的球面上有100个固定的节点,其中每个节点有12个投射方向,机械臂可精确地移动,且在指定位置上精确地停止,最多可形成1 200条射束。对头部病灶,照射距离为650或800 mm;对体部病灶,照射距离为800~1 000 mm。采用等中心或非等中心照射,形成圆球面或椭圆球面射野分布,可使头颈部肿瘤治疗精度达到0.95 mm,胸腹部肿瘤呼吸追踪精度达到1.5 mm[7]。
1.2.2 影像引导功能强大,摆位及治疗中定位精度高
放射治疗一般需要比较精确的固定装置,使影像定位时的患者体位与治疗时保持一致。而射波刀对于患者的体位固定要求不是很严格,因为它通过2组正交的kV级X线摄像,在治疗前进行数字重建图像(digital reconstructedly radiograph,DRR)配准,可以使治疗位置与计划(定位)位置有很好的一致性,并且在治疗过程中可以通过图像引导随时校正患者位置,保证位置精度在1 mm以内。
1.2.3 同步呼吸追踪(Synchrony),实现动态治疗定位
为解决肿瘤靶区随呼吸发生三度空间位移的问题,呼吸门控技术要求X线的发射与患者呼吸某一周期同步,这样就只有在一个很小的呼吸周期内可以进行照射;呼吸保持技术要求患者在治疗过程中保持某一呼吸状态,那些肺功能有缺陷的患者很难做到;而同步呼吸追踪技术通过建立患者自然呼吸运动时体表运动模式和体内肿瘤三度空间的连锁关系,得到自然呼吸周期中肿瘤的四维影像模式,并将此四维影像模式回馈到机器人手臂,带动直线加速器X线束向相应的方向照射,从而实现动态的、精准的四维照射[8-9]。
1.2.4 唯一利用人体骨架结构作为目标参考系的放疗系统
射波刀利用颅内病灶与颅骨之间、脊柱与其周围肿瘤之间的固定对应关系进行肿瘤病灶定位[10],形成颅骨追踪(6Dskull)和脊柱追踪(X-sight-spine)2种追踪方法。对于随呼吸运动的肿瘤,需植入4~6粒金标(fiducial)建立靶目标参考系,再利用同步呼吸追踪功能进行动态追踪。对于盆腔等软组织部位肿瘤,因随呼吸运动幅度小,所以只需植入金标建立靶目标参考系就可实现精确定位。对于肺部某些部位肿瘤,因肿瘤组织密度远大于肺组织密度,利用X-sight-lung追踪软件可将肿瘤从肺组织中识别并实施同步呼吸追踪定位。
2 射波刀技术发展
2.1 剂量率提高
第三代射波刀(G3)剂量率为400 cGy/min,第四代射波刀(G4)剂量率提高到800或1 000cGy/min[11],缩短了照射出束时间,提高了治疗效率。
2.2 路径优化
G3射波刀治疗过程中,机械臂需按顺序走完计划中每一路径上的所有空间节点,包括不出射线的空间节点。而G4射波刀则可跳过不出射线的空间节点,减少了机械臂的走位运动,缩短了走位时间。
2.3 软件更加丰富
在G3射波刀的简单(simplex)和迭代(iterative)2种剂量算法基础上,G4射波刀增加了被誉为剂量计算黄金标准的蒙特卡罗(Monte Carlo)算法,并且通过更大容量的X线摄像机实现了专门治疗前列腺癌的追踪软件(InTempo)。
2.4 突破了SGI服务器瓶颈
通过增加CDMS工作站,使G4射波刀承担了G3射波刀SGI服务器的患者DRR图像生成、患者数据存储与备份、CT及MR定位图像传输的工作任务,从而使SGI服务器只需执行患者治疗控制工作,优化了工作流程,大大提高了工作效率。
2.5 自动更换准直器
G4射波刀增加了准直仪更换器(Xchange)。治疗过程中,计算机操控机械臂上的准直仪更换器自动更换准直器,无需治疗人员进入治疗室进行人工更换。
2.6 加大了机械臂运动空间
G4射波刀影像板由G3的地面上90°正交改为落地式,隐藏在地板内,增加了机械臂运动空间,从而增加了节点数,入射角度也更为灵活。
2.7 MLC功能及自动成型功能
最新的射波刀可带有多叶光栅(multi-leaf collimator,MLC),自动形成各种不规则射野,并且可通过机头前方的六边形附件自动形成12个不同大小孔径的准直器。
3 射波刀的临床应用
我院于2010年4月引进射波刀,截止到2014年2月,已治疗全身各部位肿瘤患者827例。回顾性收集2010年4月至2011年9月治疗的322人次(其中41人再次治疗或第三次治疗)患者资料:颅内152例(47.2%),胸部 100例(31%),腹部 52例(16.1%),脊髓脊柱肿瘤16例(5%),盆腔2例(0.6%);其病种分别为:原发肺癌及肺转移癌100例,原发脑瘤及脑转移瘤120例,肝癌及肝转移癌31例,胰腺癌21例,脊柱转移癌16例,其余为全身其他肿瘤。下面简单介绍射波刀治疗的一些初步经验。
3.1 颅内良性肿瘤
(1)当垂体瘤患者瘤体较大且不能耐受开颅手术时,可使用射波刀分次治疗。处方剂量分割成3~5次给予,既可达到有效控制肿瘤的目的,又能同时减轻颅内不良反应[12]。据统计,我院治疗的50例垂体瘤患者在治疗后均有不同程度改善。图2为某垂体瘤患者在射波刀治疗前、后增强MRI影像图。该患者76岁,肿瘤体积1.4 cm3,因年龄较大不能手术,分割3次射波刀治疗,处方总剂量20 Gy,肿瘤周边70%等剂量线包绕95%肿瘤体积。尽管视神经和视交叉距离肿瘤非常近,但对二者的剂量限制很成功,治疗后视力未受影响,而且治疗后复查,MRI显示肿瘤体积明显缩小。
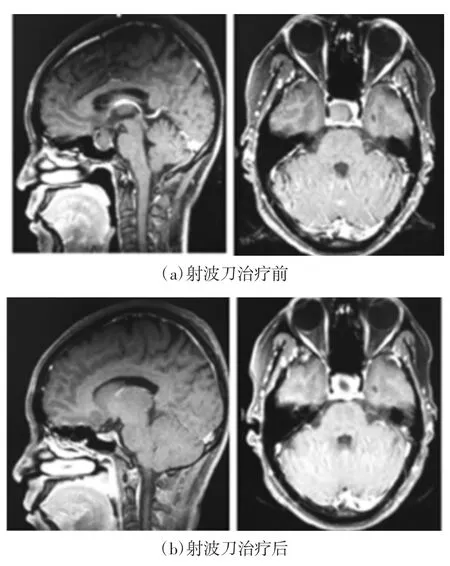
图2 垂体瘤射波刀治疗前、后增强MRI比较
(2)中、小型听神经瘤是放射外科治疗的良好适应证之一。射波刀通过实施低分割照射,可以很好地保存患者的有效听力。图3为某左侧听神经瘤患者在射波刀治疗前、后增强MRI影像图。该患者的肿瘤体积为1.5 cm3,肿瘤附近有金属异物,无法做伽马刀治疗,实施分割照射3次、周边剂量18 Gy的射波刀治疗,治疗后随访患者肿瘤缩小,且听力正常。
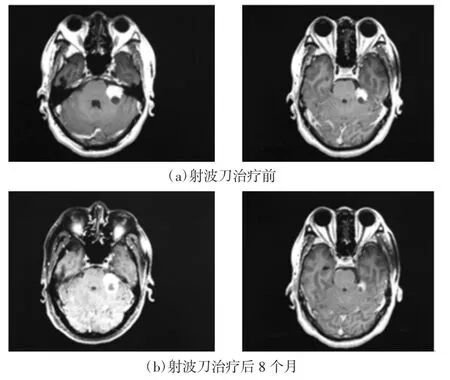
图3 听神经瘤射波刀治疗前、后增强MRI比较
3.2 脊髓、脊柱及椎管内外的肿瘤
Ryu等[13]的16例射波刀治疗脊髓肿瘤患者结果显示,在其治疗结束后未发现与射波刀治疗有关的并发症,并且在6个月后的随访中也没有出现明显的疾病进展,同时减轻了患者痛苦,提高了患者生活质量[14]。本组16例脊髓、脊柱及椎管内外的转移瘤经射波刀治疗后,多数肿瘤得到控制,1/3肿瘤缩小。
3.3 神经系统以外的肿瘤
根据文献报道,肺癌、肝脏肿瘤、胰腺癌、肾脏肿瘤、前列腺癌、骨肿瘤和一些妇科肿瘤也可应用射波刀进行放射治疗[15]。由于Synchrony呼吸追踪系统可在治疗过程中追踪及捕捉肿瘤的活动,因此射波刀在立体定位放射治疗领域中的作用独一无二。本组100例肺癌患者接受射波刀治疗后,肿瘤基本没有明显进展,表现为35名患者完全缓解、60名患者部分缓解、3名患者的肿瘤稳定及2名患者的病情恶化。本组31例肝癌患者接受射波刀治疗,70%的患者情况好转,肿瘤缩小。Koong[16-17]及其研究队伍发表的2项研究显示,佐以Synchrony呼吸追踪系统的射波刀治疗局部晚期胰腺癌,可使病情得到控制;在有效保护盆腔等脏器的前提下,可进一步提高前列腺癌靶区照射的总剂量[18]。
4 结语
射波刀系统以其先进的交互式机器人技术,精确操控X线以共面和非共面、聚焦和非聚焦、等中心和非等中心的照射方式治疗肿瘤;以实时拍片验证体位和影像引导纠偏的方法确保摆位的准确性;以同步呼吸追踪系统得到自然呼吸周期中肿瘤四维影像模式,从而带动直线加速器X线束实施动态的、精准的四维照射,提供了传统放射外科治疗所无法比拟的靶区照射的高度精确性,解决了患者呼吸运动的难题。该系统是目前世界范围内唯一利用人体骨架结构作为目标参考系的放疗系统,是兼容放射外科和放射治疗的新一代设备,能治疗全身病灶且治疗过程无创或微创,分割次数少,单次剂量高,并发症少,恢复期短。随着技术的不断发展和临床应用的日渐成熟,射波刀系统必将造福越来越多的肿瘤患者。
[1]Adler J R Jr,CHANG S D,Murphy M J,et al.The cyberknife:a fram-eless robotic system for radiosurgery[J].Stereotact Funct Neurosurg,1997,69:124-128.
[2]Adler J R Jr,Murphy M J,CHANG S D,et al.Image-guided robotic radiosurgery[J].Neurosurgery,1999,44:1 299-1 306.
[3]李玉,韩悦荣,刘骁雄.射波刀[M]//李玉,梁军.三维适形与调强放射治疗的基础与临床.北京:北京科学技术出版社,2010:280-295.
[4]Benedict S H,Yenice K M,Followill D,et al.Stereotactic body radiation therapy:the report of AAPM Task Group 101[J].Med phys,2010,37(8):4 078.
[5]王境生,李丰彤,董洋,等.射波刀5种追踪方法的原理[J].医疗卫生装备,2013,34(4):130-132.
[6]CHENG W,Adler J R.An overview of CyberKnife radiosurgery[J].Chin J Clin Oncol,2006,3(4):229-243.
[7]CHANG S D,Main W,Martin D P,et al.An analysis of the accuracy
(►►►►)(◄◄◄◄)of the cyberknife:a robotic frameless stereotactic radiosurgical system[J].Neurosurgery,2003,52:140-147.
[8] 朴京虎,吴承远,李玉庆,等.射波刀治疗中枢神经系统疾病81例的体会及文献复习[J].中国神经肿瘤杂志,2009,7(4):250-253.
[9] 朴京虎,吴承远,姜辉,等.射波刀治疗原发性三叉神经痛初步经验[J].立体定向和功能性神经外科杂志,2009,22(2):108-110.
[10]LIAO J J,Judson B,Davidson B,et al.Cyberknife fractionated stereotactic radio surgery for the treatment of primary and recurrent head and neck cancer[J].International Journal of Radiation Oncology Biology Physics,2005,63(suppl 1):381.
[11]巩汉顺,鞠忠建,徐寿平,等.G4 CyberKnife——全新式立体定向放疗设备及其临床应用[J].医疗卫生装备,2013,34(4):127-129.
[12]Adler J R Jr,Gibbs I C,Puataweepong P,et al.Visual field preservation after multisession cyberknife radiosurgery for perioptic lesions[J].Neurosurgery,2006,59:244-254.
[13]Ryu S I,CHANG S D,Kim D H,et al.Image-guided hypo-fractionatedstereotacticradiosurgerytospinallesions[J].Neurosurgery,2001,49(4):838-846.
[14]Park K M,Kim K H,Jo M K,et al.Feasibility of Cyberknife for the treatment of localized prostate cancer preliminary results[J].Eur Urol,2006,5(suppl 2):132.
[15]陈光耀.CyberKnife放射外科治疗规范[M].上海:学林出版社,2008,30(3):140-142.
[16]Koong A C,Le Q T,Ho A,et al.Phase I study of stereotactic radiosurgery in patients with locally advanced pancreatic cancer[J].Int J Radiat Oncol Biol Phys,2004,58(4):1 017-1 021.
[17]Koong A C,Christofferson E,Le Q T,et al.Phase II study to assess the efficacy of conventionally fractionated radiotherapy followed by a stereotactic radiosurgery boost in patients with locally advanced pancreatic cancer[J].Int J Radiat Oncol Biol Phys,2005,63(2):320-323.
[18]MurphyM J.Trackingmovingorgansinrealtime[J].SeminRadiat Oncol,2004,14(1):91-100.
(收稿:2014-03-15 修回:2014-07-26)
(栏目责任编校:李惠萍 傅 雳)
Present situation,development and clinical application of Cyberknife
HU Li-hong,CHENG Rui,ZHANG Qian,ZHENG Guo-bao
(Department of Tumor,the 150th Hospital of the PLA,Luoyang 471031,Henan Province,China)
Cyberknife is introduced for its composition,structure,irradiation system,image guiding,respiration tracking technique and target reference system.The technical advantages of the fourth-generation Cyberknife are analyzed over the third-generation one.Clinical trials show that Cyberknife behaves well in the tumor with small body,moving synchronously with breath or difficult to be cured by operation,Gamma knife and accelerator.[Chinese Medical Equipment Journal,2015,36(3):110-112,115]
Cyberknife;technical advantage;tumor
R318;TH774
A
1003-8868(2015)03-0110-04
10.7687/J.ISSN1003-8868.2015.03.110
胡立宏(1970—),男,副主任技师,主要从事放射物理方面的研究工作,E-mail:hulihong_1970@sohu.com。
471031河南洛阳,解放军150医院肿瘤科(胡立宏,程 瑞,张倩,郑国宝)
程 瑞,E-mail:378393166@qq.com
