基于支持向量机的升船机电机同步控制
2015-12-21福建省特种设备检验研究院泉州分院福建泉州362000
黄 凯(福建省特种设备检验研究院泉州分院,福建 泉州 362000)
基于支持向量机的升船机电机同步控制
黄 凯
(福建省特种设备检验研究院泉州分院,福建 泉州 362000)
文中提出了具有知识表达和自学习能力的支持向量机同步控制方法,并给出干式升船机四台电机同步控制的支持向量机学习算法,对四台电机同步控制进行速度跟踪实验。结果表明支持向量机同步控制能有效实现干式升船机四台电机同步动作,且收敛速度快,鲁棒性好,能满足干式升船机同步控制的要求。关键词:升船机;同步控制;支持向量机;同步误差
1 前言
升船机是一种投入大、能耗大、危险性较高的水工设备[1]。目前的升船机主要采用传统的行走凸轮控制起重机提升。承船箱采用密封箱体,司机现场操作形式,存在耗能大、安全性能一般、钢结构自重大、自动化程度低等缺点。干式升船机[2]采用开放式箱体,可以大大减少机体负荷、降低能耗,同时提高传动机构的效率。然而,目前干式升船机无法得到广泛应用的致命缺点在于:难以在多个吊点之间获取受力平衡,即无法实现4个吊点之间的同步控制。而常规的控制方案对此要兼有高性能调速以及稳定控制难度很大。文献[3]提出一种耦合补偿的控制方法,然而其稳态特性不理想,无法应用于对安全要求极高的升船机。文献[4]提出了一种基于电液比例技术的升船机主提升油缸同步控制系统,因为缺乏实际案例的支持,难以应用到升船机领域。
机器学习是为自动控制提供决策算法的一种非常有效的手段,近年来,1995由Corinna Cortes和Vapnik等提出的支持向量机(Support Vector Machine,SVM)[5]得到学者们的认可,并将其广泛应用于工程实践中。升船机数量少,样本数据采集不易,而且是电流控制,波动颇大且数个电机间会相互影响,而SVM机恰恰是在机器学习众多算法中解决小样本、非线性、高维数等困难最为优秀的算法,具有很强的泛化能力[6],因此相对于人工神经网络等传统学习方法更能解决实际问题。
因此,文中提出一种基于支持向量机的干式升船机四台电机同步传动控制器的设计方法。该方法用支持向量机对升船机运行的各个主要参数进行自学习,并得到控制策略,以此为基础设计了同步控制器,该控制器能够较好地满足4吊点的同步运行要求,具有很高的同步精度和动态性能。
2 同步控制结构
升船机控制系统要求能使4台电机同步运行,每台电机均采用VVVF控制,如图1所示。
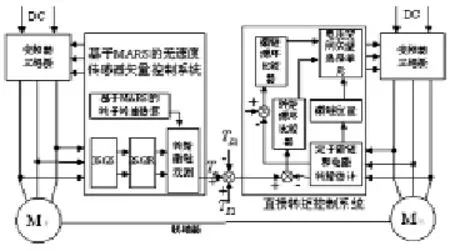
图1 4台电机同步运行控制图
为保证升船机的安全性,在初始安装后,根据工程的实际情况(卷扬机的直径、联轴器的长度等)对升船机的运行进行调试和设置。在正常情况下,由PLC统一发送启动、制动和运行等指令,同时向四台变频器输出方向、力大小进行同时控制;同时采用刚性联轴器连接相邻两电机,从而保证承船厢的水平度在任意时刻都能满足国标的要求,不至于倾覆。
但是,现场工况往往复杂多变,如风阻、电机阻力矩等很多因素难以用公式表达,因此,文中采用支持向量机的方法,让同步控制器对海量数据进行自学习和自调整,以期获得较好的同步效果,从而使联轴器几乎不受不同扭矩的影响,即不会因使用而损毁,也就不需要维护,从而获得理想的经济效益和社会效益。
3 升船机同步控制算法
3.1 SVM流程
(1)文中根据日常建议的数据整理获得样本集{( x,y),(x,y),…,(x,y)}⊂Rn,主要采集四个同
1122n n步电机的步进或者脉冲信号作为样本集,样本集的精确采集直接关系后面计算的精确性。
(2)用非线性映射将样本集中的数据映射到高维特征空间[7]进行线性回归。映射到高维度空间主要作用在于清晰分辨彼此之间的耦合信息。
设得到的回归为f(x)= ωΦ(x)+b
其中:Φ 为非线性函数,ω为权值 (1)
(3)根据利用结构风险最小化准则(SRM)[8~9],为使(1)式的估计真实风险最小,构造最小化目标函数:
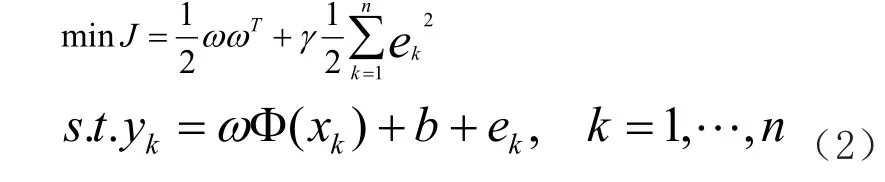
(4)设Lagrange函数为:

其中,αk为Lagrange乘子。根据K-T最优条件:
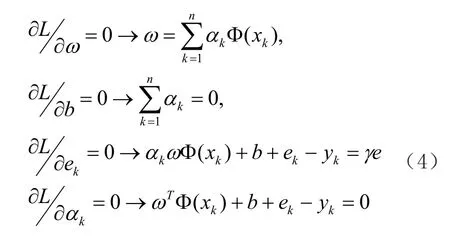
(5)对于k =1,2,…,n,消去ω和ek,得到优化方程:
(6)求解式(5)中的a、b和得
其中,K(x ,xi)为核函数[10],δ为核宽度即边界封闭包含的半径。
3.2 同步控制器的决策算法[11]
(1)输入层
设输入变量为e(t), ec(t),模糊化处理后得到控制系统的输入x。
(2)隐含层

(3)输出层
4 实验及分析
4.1 搭建仿真实验平台
搭建4台电机的同步运行控制仿真,如图2所示为每个轴的控制原理图:
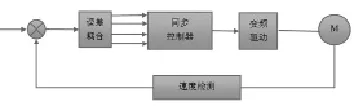
图2 每轴的同步控制图
监测每台电机的转速,与额定转速求方差,得到该轴的校准转速误差。将四个电机的转速误差耦合后,输入LS-SVM控制器。SVM优化控制输出调整量,通过调频调幅控制变频器来实现各电机的转速的控制,最终实现各电机的同步运行。
对4台电机的速度信号进行检测采集,由于实际工况存在强电干扰、强风等众多因素,因此文中在实验过程中在系统输出部分根据经验公式模拟信号的的扰动成分,使得所得信号可以等效实际信号。
4.2 实验结果
实验采集变频器20组输出数值信号作为样本输入,之后建立干式升船机电机速度的LS-SVM预测模型,利用MATLAB程序计算预测样本的估计输出,预测结果如图3所示。
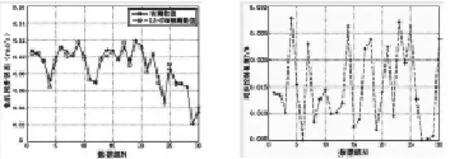
图3 预测结果图
从图3左图可以看出,实验实测的数值与LSSVN跟踪预测的数值曲线具有很高的的耦合程度,说明LS-SVM在预测干式升船机电机速度同步信号方面具有很好的效果。实验结果表明,在复杂工况下,四台电机同步控制策略是有效的,能使电机误差快速收敛且稳定运行,鲁棒性好。
5 结论
干式升船机运行环境恶劣,参数辨识困难,干扰因素多,导致控制数学模型难以建立,现有的控制策略无法有效控制。文中利用支持向量机的自学习和自适应能力,构建了基于联轴器安全保障的智能控制器,给出了学习算法和控制策略,并用仿真系统进行验证。结果表明:基于支持向量机的同步控制算法控制精度较高,鲁棒性好,可以解决干式升船机的4吊点电机的同步问题。
[1]黄建平,易春辉.丹江口大坝升船机监控系统设计[J].人民长江, 2012, 43(5):39-41.
[2]吴德镇.升船机及其发展概况[J].水运工程, 1982,(10):21-24.
[3]秦雅岚,唐勇,王伟.垂直升船机多轴多电机机械同步出力均衡控制技术的研究与应用[J].中国水运(下半月刊), 2011,(01).
[4]朱仁庆,吴有生,王延东.升船机主提升油缸同步控制系统研究与应用[J].华电技术,2014, 36(7):39-41.
[5]张学工.关于统计学习理论与支持向量机[J].自动化学报,2000,26(1):32-42.
[6]Dug Hun Hong, Chang Hai Wang. Support Vector Fuzzy Regression Machines[J].Fuzzy Sets and Systems,2003,138.
[7]周欣,吴瑛,等.基于高阶累积量和支持向量机的信号调制分类[J].2009,信息工程大学学报,2009,10(4):466-470.
[8]Chandaka S,Chatterjee A,Munshi S.Support vector machines employing cross-correlation for emotional speech recognition [J]. Measurement.2009, 42(4):611-618.
[9]张钦礼.基于支持向量机和模糊系统的机器学习方法及其应用研究[D].无锡:江南大学,2009.
[10]Weston J, Watkins C. Support vector machinesfor multi-class pattern recognition[J]. Proceed-ings of the Seventh European Symposium on Artificial Neural Networks.1999.
[11]B Sholkopf,K Sung,CJ C Burges,etal. Comparing support vector machine with Ga-ussian kernels to radial basis function classifiers[J].IEEE Trans.Signal Processing,1997,45:2758- 2765.
[12]Zhi-wei Guo, Guang-chen Bai. Classification using least squares support vector machine for reliability analysis [J]. Applied Mathematics and Mechanics .2009,30(7):853-864.
Motor Synchronization Control of Ship Lift Based on Support Vector Machine
HUANG Kai
( Fujian Special Equipment Inspection and Research Institute,Quanzhou Branch Institute,Quanzhou 362000, Fujian, China)
In this paper, we have come up with a synchronous control method of support vector machine, which has the ability of knowledge representation and the self-learning. At the same time, the learning algorithm of support vector machine for four motor synchronized control in ship lift machine was given. Then, we took the experiment of four-motor synchronous speed track control. The result showed that, synchronous control of support vector machine can achieve synchronous action of the four motors in ship lift. This method has advantages of fast convergent speed and good robust, which can meet the requirements for synchronization control of ship lift.
Ship lift; Synchronization control ; Support vector machine; Synchronization error
2015-01-15
黄 凯,男,福建省特种设备检验研究院泉州分院,工程师 ,硕士