针对反舰导弹末制导系统的目标角闪烁特性建模
2015-12-21刘赵云吴剑锋卢大威
刘赵云,吴剑锋,卢大威
(1.海军驻航天三院军事代表室,北京100074;2.北京机电工程研究所,北京100074;3.国防科技大学,湖南 长沙410073)
0 引言
新型雷达末制导系统除了要完成对舰船目标的截获、跟踪等基本功能外,还要具备根据特征参数进行目标大小、形状、类别甚至身份等识别的能力,高分辨末制导系统的出现正好契合了这种对高价值目标更加精确打击能力的需求。然而,现代化的技术手段虽然提升了末制导系统在复杂战场背景下的作战能力,但也同时带来了一些技术上的新问题,特别是当弹目距离越来越接近时,舰船目标不同部位的散射强度和相对相位的随机变化所造成的角闪烁效应会变得不可忽略,并且这种目标的角闪烁效应会随着末制导系统分辨力的提高而越来越严重。当前如何应对目标的角闪烁效应已经成为了高分辨末制导系统在设计过程中要解决的主要抗干扰问题之一。本文通过对舰船和复杂电磁环境特性的高保真度仿真,建立了目标的角闪烁预测模型,该研究成果对于末制导系统的算法设计与验证、抗干扰性能的离线评估等具有十分重要的意义。
1 理论建模与计算
舰船目标的角闪烁特性的来源是由末制导系统(本文主要针对雷达导引头这种末制导系统)入射的电磁波信号被舰船反射所产生的散射场,因此,进行角闪烁特性的建模和仿真必须首先进行舰船目标散射场的计算,整个计算场景的示意图如图1所示。

图1 末制导系统对舰船目标的入射与散射关系示意图
令Pt、G、F(·)、hr和hi分别表示雷达导引头发射功率、天线最大增益、方向图函数、收/发极化方式;Ψc、Ψn分别表示OROT、OROn与天线电轴ORxR的夹角;R(εx)为 极 化 旋 转 矩 阵;表 示 第n个 散 射 中心入射方向为(ψn,θn)时该散射中心的单站线极化散射矩阵;Y0为自由空间导纳。那么,第n个散射中心处的入射场强及其在雷达导引头处的散射场强可分别表示为:

因而雷达导引头总的散射场强Es和总功率Pr可分别表示为:


式中,Aeff为天线有效孔径。
为简便起见,散射矩阵简写为S,将极化旋转矩阵R(εx)简记作R,并记:S=SRe+j SIm。由于末制导过程中天线瞄准误差Ψc一般很小,同时S 各元素在Ψc=0的δ邻域内变化很小,因而下面仅考虑Ψc=0的情形。
归一化场强Es=(Rhr)TSRhi的相位函数及其空间梯度可表示为如下形式:

其中:

按照相位梯度法的基本原理[1-2],可得到如下角闪烁线偏差信号:

其中:



将式(11)代入式(8)中,并令极化旋转角εx=0,收发极化对为:
则在目标远场,式(7)的角闪烁可简化为如下形式:


其中,符号[S]ij表示矩 阵S 的第i 行、第j 列元素为 远 场 形 式。除θ 的 定 义有别外,式(13)与文献[2]中的(4-80a)、(4-80b)是完全一致的。可见,文献[2]的计算公式只是式(13)在特定极化方式下的远场近似。由于式(13)是通过精确求解相位函数的空间导数而得到,因而可称之为严格解析式,它并不包含远场假设,因而可适用于任何距离范围。
由式(7)~(9)可知,雷达导引头近场角闪烁与距离r、入射方向(ψ,θ)、天线方向图F(·)、波数k、收发极化方式(hr,hi)、极化旋转角εx等因素有关,在末制导跟踪状态下,可认为视线角误差εy、εz等于估计器误差,一般为mrad量级,因此可近似认为,Ψc=0,ψ=θ=0°。
2 典型角闪烁特性仿真分析算例
考虑雷达导引头在典型弹道条件下对国外某航空母舰进行探测的场景,航母的运动模型满足恒速模型,航母的初始位置位于坐标原点,以某一恒定速度向正y 轴方向运动,速度约15m/s。末制导过程中的运动可简化为质点运动,在目标轨迹给定的条件下,可依据比例制导的制导律来确定。在获得二者的运动参数后,通过适当的坐标变换便可得到计算所需的参数集
根据式(7)可得到雷达导引头对舰船目标的角闪烁特性,如图2~5所示。

图2 角闪烁与距离和入射角的切片图
图2给出了仿真过程中,εx=0时角闪烁线偏差(e=与距离和入射角的四维切片图。由图2可见,无论是方位切片还是俯仰切片,角闪烁沿r方向由远距的条带状过渡到近距的斑点形式,体现了距离对近场角闪烁的影响,这种关系在图3(a)、图3(c)、图4(a)、图4(c)中有着更加清晰的表现;图2的距离切片则表现了角闪烁与入射角的关系,与RCS一样,近场角闪烁对姿态的敏感性也强于对距离的敏感性,从图3(b)、图3(d)、图4(b)、图4(d)与图3(a)、图3(c)、图4(a)、图4(c)的对比不难看出这一点。另外,由于仿真的目标关于XOZ 平面对称,因而当ψ=0时,eψ=0,图3(c)清晰地表示了这一点。
图5表示了ψ=15°、θ=0°条件下极化旋转角εx对角闪烁线偏差eψ、eθ的影响。由式(7)可知,特定极化方式下εx是通过改变散射矩阵四个元素的权重来影响eψ和eθ,因而会表现出如图5所示的周期性。
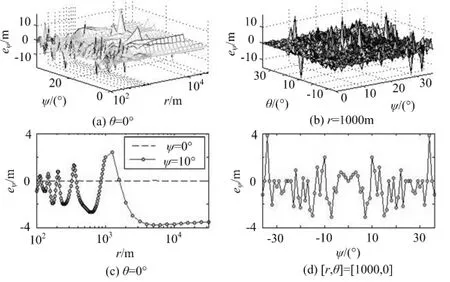
图3 eψ 与距离和姿态的关系

图4 eθ 与距离和姿态的关系

图5 极化旋转角对角闪烁的影响
从上述仿真结果可以看到,在飞行器由远及近接近航母过程中,线偏差会逐渐增大,近场角闪烁确实会频繁发生并与实际情况相符,这说明了所构建的角闪烁仿真和分析模型的有效性。
3 结束语
反舰导弹末制导系统的目标角闪烁特性研究是一个复杂的过程,是对“看不见”、“摸不着”事物的研究。同时,由于该特性在外场试验中的可直接获取性较低,因此,理论研究就成为了一个有效的方法和手段。本文主要提供了一种目标角闪烁特性的建模和仿真的理论方法,从研究舰船的RCS特性出发,采用相位梯度法原理得出了目标的角偏差特性,从而在物理上获取了末制导系统的角闪烁参数。后续将不断对算法进行优化和改进,使之成为末制导系统研制工作的重要工具和手段。■
[1]黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2006.
[2]黄培康,等.雷达目标特征信号[M].北京:宇航出版社,1993.
[3]孙文峰.宽带毫米波雷达精确制导信息处理方法研究[D].长沙:国防科技大学研究生院,1998.
[4]Ostrovityanov RV,Basalov FA.Statistical theory of extended radar targets[M].Artech House,1985.
[5]李保国.基于目标角闪烁特性的末制导雷达跟踪与识别技术[D].长沙:国防科技大学研究生院,2005.
[6]陈国瑛.雷达目标角闪烁的建模与抑制研究[D].北京:中国航天部二院,1998.