Link-16数据链分层模型分析
2015-12-20王兴华
鲁 阳,王兴华,向 新,孙 晔,王 锋
(空军工程大学 航空航天工程学院,陕西 西安710038)
0 引 言
数据链是C4ISR 系统框架的基本组成部分,在传感器、指控单元和武器平台之间传输战术信息,是战术信息交互的重要方式[1]。由于多种数据链之间的标准不统一,使得数据链之间的交互设备复杂、成本高。本文在OSI模型的基础上,提出一种通用的数据链模型,旨在为各种数据链的交互提供参考。
文献 [4]提出一种基于全球网格模型的数据链模型;文献 [8]提出一种Link-16数据链的网络同步方法;文献[9]列出Link-16数据链的消息标准;文献 [10]详细介绍了扩频序列的同步方法以及PN 序列的相关捕获技术。
通用数据链模型从战术任务数据链的核心内容就是消息标准和通信协议,同步技术保证网络成员之间的信息传输。与传统的OSI模型相比,通用数据链模型多了任务层。通用模型从特定的作战任务出发,对应到特定的战术消息,用规定的消息格式封装,通过链路层和物理层将消息发送到目的地。
1 Link-16的消息标准
1.1 J系列消息结构
在Link-16中,系统间信息的交换、网络建立和维护都是通过J系列消息实现的。
J系列消息分为固定格式、自由文本报文和可变格式3种,可变格式已经形成新的标准——VMF标准,通常所说的J系列消息是指固定格式的J系列消息[1,2]。J系列消息的基本单元是由75个比特组成的字 (包含5个校验比特),有起始字、扩展字和连续字3种类型。自由文本的字的75比特全部用于传输消息,没有校验比特。
起始字中的J系列标记和J系列子标记对应的十进制数即是消息的编号:Jn.m.其中RTT 消息没有Jn.m 编号。n和m 的不同组合可以定义多达256 种消息,但是Link-16只有91种消息。当起始字不足以表示消息时,就需要扩展字。特别注意的是扩展字是根据起始字的标识和子标识的组合来确定和解释的,所以扩展字必选按顺序发送。
连续字比扩展字多了5 比特的继续字标识,因为有5比特标识的存在,所以连续字可以按任意顺序发送。
报头附加在J消息的开始,对J消息进行解释,具体格式见表1。

表1 报头字格式
1.2 J系列消息的封装
J系类消息的封装是把J系列消息转化为适应无线信道的消息,其中包括纠错编码,交织,扩频调制和加同步头。报头使用RS(16,7),消息使用RS(31,15)进行纠错编码。J系列消息的封装基本单元为脉冲串,脉冲宽度为6.4 us,脉冲间隔13μs,脉冲串有单脉冲字符和双脉冲字符,无论是单脉冲还是双脉冲,虽然长度不一样,但是包含的信息量是一样的,双脉冲只是重复发送了一遍。
Link-16数据链中,数据有5种封装结构:标准双脉冲(STDP)、2 倍 打 包 单 脉 冲 (P2SP)、2 倍 打 包 双 脉 冲(P2DP)、4倍打包单脉冲 (P4SP)和往返定时询问和应答封装[3]。
以STDP消息为例说明封装的具体过程,封装格式如图1所示。STDP消息有3个字,加上报头的35比特,共260比特。纠错编码后,报头变为80 比特,消息变为465比特,共545比特,每5 个比特映射为一个双脉冲字符,所以共有109个双脉冲,加上同步的20个双脉冲,共129个双脉冲。之后对每个脉冲进行扩频,将原来的5比特映射为32比特,扩频码的长度为32比特,不同的消息映射为不同偏移的扩频码。扩频后,每个码片长度为0.2μs。相邻的脉冲用不同的载频调至射频发射[3]。

图1 STDP报文封装结构
从图1 可以看出,消息封装包括了抖动、粗同步头、精同步头、报头、数据和传输保护段。其中STDP和P2SP用抖动段,抖动是指端机在发射时隙开始时,经过一段抖动 (延迟)才发射信号,抖动延迟时间长短是随机的。值得注意的是,抖动时间是受伪随机序列控制的,网内成员是可以通过对应的伪随机序列获取抖动时间长度的,而敌方是不知道的,这样可以提高系统的保密性。
当接收到消息后,通过检测同步段,从而获得一帧信号的起始位。粗同步和精同步都采用双脉冲字,粗同步头包含16个双脉冲字符,精同步头包含4个双脉冲字符,粗同步段产生一个误差不超过0.2μs(一个码片宽度)的定时信号,通过精同步段后,误差不超过20ns。
2 Link-16通信协议
Link-16数据链是采用TDMA 协议进行工作的[4]。在这种模式下,发射机发射消息是基于时隙分配的。
2.1 Link-16时隙结构
图2为Link-16时隙划分。24 小时被分为112.5 个时元,每时元又等分为64个时帧,每一时帧由1536 个时隙组成。所以每个时隙长度为7.8125 ms,每个时元包括98304个时隙。每个时元的98304个时隙分成A、B、C 这3组,每组有32768 个时隙,编号为0~32767,时元内连续3个时隙属于不同的组。所以,每时帧包含A、B、C 这3组时隙各512个[3,4]。时隙的参数有:时元号、组号和时隙编号。

图2 Link-16时隙结构
时隙是Link-16系统最基本的时间单位,也是个网络成员发射或接收消息最基本的时间单位,每个时隙分为3个部分:同步段 (抖动、粗同步和精同步)、数据段 (报头与战术数据)及传播保护段。时隙保护段是为了防止由于信息传输延迟而影响下一个时隙。
2.2 Link-16时隙分配方式
通信协议规定了每个网络成员的广播时隙,在自身的广播时隙之外接收其它成员信息。
Link-16网络容量取决于NPG。不同的NPG 有不同的时隙数量,NPG 对应的时隙称为时隙块。每个时隙块的时隙在一个时元内是均匀分布的。时隙块的参数有以下3个:一是组号(即A 组,B组或C组);二是时隙块第一个时隙的编号;三是时隙块的时隙个数。所以时隙块的最大值为32768,即某个时隙块的所有时隙都属于同一个组,时隙间隔为3如初始入网NPG 的组号为A,第一个时隙的编号为0,记为A0。时隙块共有64个时隙,所以每隔12s有一个时隙,间隔1536个时隙,即第二个时隙为A512,以此类推。
2.3 Link-16时隙接入模式
NPG 虽然划分了时隙,但是并没有把时隙分给具体用户,时隙接入模式就是完成这个功能的。Link-16共有4种接入模式:指定模式、竞争模式、时隙再分配模式和应召模式[5]。
指定模式就是给网络参与组分配指定时隙,网络成员直接按照规定使用即可。
竞争模式是在用户总量大于分配时隙的情况下的一种接入方式,每个成员都可发出申请,最终时隙分配给哪个用户是随机的。
时隙再分配模式下,时隙是共享的,称为重新分配池。如果用户申请的总量超过重新分配池的容量,则各个用户按照相同的比例减少时隙需求,以保证每个用户都可以申请到时隙。
应召接入模式:这种模式下的用户时隙分配是动态的。
最常用的接入模式为指定模式,只有在时隙容量不足或者特殊情况下,才使用竞争接入和时隙再分配接入,应召接入很少使用。
2.4 Link-16网络工作模式
Link-16有层叠网和多网两种网络工作模式[6]。
层叠网支持Link-16的话音、空中控制及战斗机——战斗机通信功能。对于这些功能,由操作人员选择要参与的网号 (0~126)。不同的网络有不同的跳频图案,所以网络之间相互不干扰。以空中控制网络为例,每个控制平台及受控的战斗机选择唯一的网络号,多个空中控制电路可以使用相同的时隙组运行,多达20~30个空中控制平台及战斗机组可以有源。通过简单的改变网络号,平台就可以在不同的网络间切换,无需再对端机进行初始化。在这种网络模式下,不同网络下的NPG有相同的时隙和传输安全参数。
多网模式里,网络也是通过网络号加以区分的,不同的网络有不同的跳频图案和传输安全参数 (MSEC)。但是这种模式下不同网络的NPG 占用不同的时隙,每个端机只能工作在一个网络下,如果需要进入其它网,则需要重新入网,并初始化端机。和层叠网模式相比,多网模式最大的优点是相同的时隙被不同的平台用于不同的功能,因而,增加了整个网络的吞吐量。
3 Link-16的同步技术
Link-16是基于时分体质的系统,因此每个网络成员需要精确的时间。在Link-16体制下,以任意一个成员作为时间基准 (但是任何时间有且仅能有一个时间基准),时间基准称为NTR。
为进行正常通信,首先需要进行网络同步,即入网的各个用户需要统一到NTR,网络内其它端机的时钟要去无限接近这个NTR,被选为基准的端机在规定的时隙广播入网消息,入网端机收听基准端机的广播入网消息,操作员尽可能准确的估计系统时间,并输入入网端机。入网端机从A0~A6时隙段选择一个当前还未出现的时隙,收听入网消息,如果时间估计准确,则可以收听到入网消息,否则,重新估计。
入网消息中,包括网络时间修正初始字,其中包含执行时间的时元编号、时元子区、新时隙编号、新时隙组、剩余时间改变等信息。时元编号表示在该时元将进行时间修正;时元子区编号为0~63,表示修正时间所在的时元子区;新时隙编号为0~32767,表示在该执行时间的新的时隙号码;新时隙组编号为0~3,0 表示未说明,1 表示A组,2表示B组,3表示C组。
端机接收到入网消息后,用接收时间去校正端机时间。调整后的端机时间仍然包含传播延迟tp和端机间的初始时钟偏差δ,此时达到粗同步,系统在粗同步状态下,只能发送往返定时RTT 消息,不能发送其它任何消息。这是因为没有精确的时钟,发射的信号会对网内用户形成干扰,而且网内成员也难以确定接收时刻。
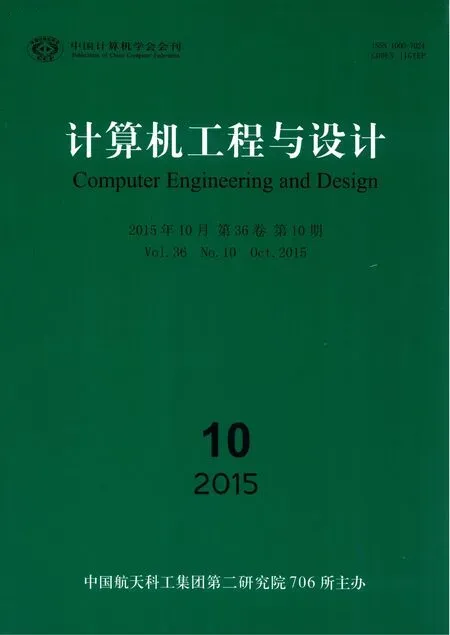
粗同步后,即进行精同步,精同步有主动方式和被动方式两种,被动方式精同步是通过其它成员的位置多次定位而获取自身位置信息的,这和卫星定位原理相似[7,10]。主动方式精同步是通过往返RTT 报文实现的,端机发送询问报文,应答端机在它的时隙开始4.275ms后发送应答报文[8],其同步过程如图3所示。

图3 Link-16时钟同步
TOAI是应答端机接收到询问端机询问信号的时间;TOAR是询问端机接收到应答端机应答信号的时间;tp为传播时差;δ为系统时钟误差;td为一常数,是RTT 消息封装中询问消息和应答消息的时间间隔,为4.275ms
得到时钟修正量δ后,端机立即进项调整,调整后则完成精同步。精同步后,端机即可发送消息。
4 Link-16的分层模型
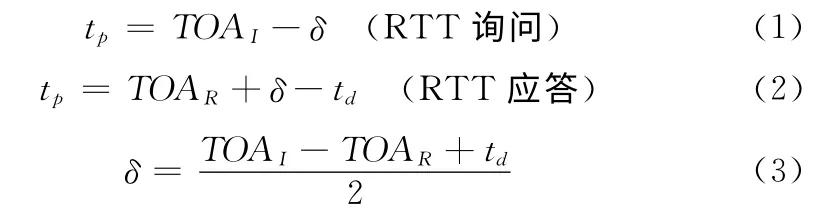
分层模型共7 层,分别为任务层、应用层、服务层、传输层、网络层、链路层、物理层,如图4所示。
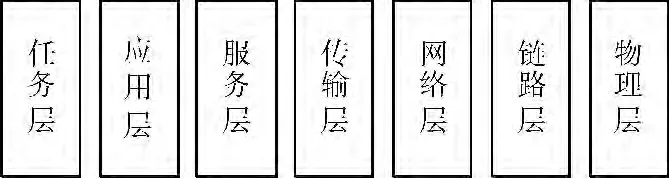
图4 Link-16分层模型
4.1 Link-16数据链各层功能描述
在分层模型里,任务层可以简单理解为一些特定应用层的集合,这些特定的应用层组合在一起,完成特定的任务。在Link-16数据链里,一些底层的功能如空中防御、区域导弹防御,就可以组成任务层;应用层里包括各种各样的战术消息,如:往返计时消息 (RTT)、精确定位与识别消息 (PPLI)、网络时间更新消息等等,每个消息都用对应的功能,RTT 就是用来进行网络同步的,PPLI用于定位识别;服务层的功能就是把应用层的消息转化为面向比特的J系列消息,传向传输层,或者把传输层的面性比特的信息转换为战术消息传向应用层;Link-16的传输层就是给NPG分配时隙和控制流量;网络层决定了通信网工作模式是层叠网模式还是多网模式,在不同的网络模式下决定了NPG 时隙的接入方式,层叠网下时隙接入模式为指定模式,多网下接入模式为时隙再分配;链路层对服务层的比特加报头,说明消息的航迹号和封装格式;物理层完信号的发射和接收,主要技术有RS信道编码,交织,扩频,调制。
不难发现,任务层和应用层针对的是消息的具体内容,不属于无线通信的范畴;服务层把消息的内容转换为无线通信中的比特流;传输层和网络层联合控制物理层发射/接收时刻;链路层就是对比特流进行封装,可以理解为数字信号成帧,物理层就是完成消息的发射和接收。
4.2 链路层的关键过程
链路层数据转换如图5 所示,从流程图里不难看出,从服务层的消息经过了CRC编码和增加报头,不同种类的消息处理过程稍有不同,这是因为消息种类的不同而决定的,如往返计时消息只有报头,而没有消息本体,自由文本消息其中没有校验比特,所以不需要进行CRC编码。
CRC编码具体过程简述为,210比特的消息数据和15为的航迹号 (报头的4-18)比特共225 比特,进行CRC(237,225),形成12比特的校验比特,12比特校验比特分为3组,每组4个比特,再加上一个比特的备用,共5 个比特,跟在70比特消息后面,形成标准的75比特的字。
设k比特信息码多项式为m(x),n 为码长,CRC(237,225)码生成多项式g(x)为

图5 链路层

对信息码多项式左移n-k位,和g(x)相除,所得的余式即为校验比特r(x)

将余式r(x)对应的消息比特加在信息比特之后,完成了CRC编码。
4.3 物理层的关键过程
物理层的过程可以简述为:链路层的260 比特消息首先要进行信道纠错编码,报头部分编码格式为RS(16,7),字部分为RS(31,15)。将纠错编码后的比特处理为脉冲,然后对脉冲进行扩频调制,之后根据网号和NPG 给消息加同步头,至此基带信号产生完毕,根据跳频图案调制射频段即可发射出去,物理层数据转换过程如图6所示。
脉冲的5比特消息使用长度为32的扩频码,对于不同的消息,采用相同的扩频码,只是移位不同。Link-16工作频段为960 MHz~1215 MHz,在频段范围内共有51个跳频点,51个频点之间间隔3 MHz。传送数据时,每个脉冲指定一个频点,每跳隔开9 个频点,载波的跳变速率为76923跳/s,51个频点公式如下
5 结束语
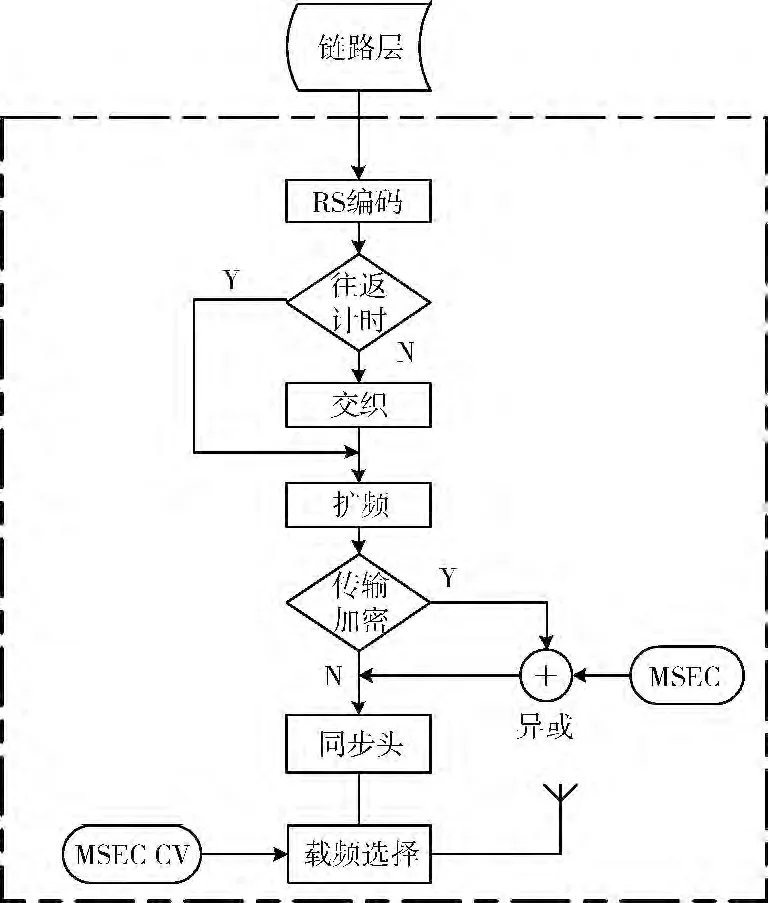
图6 物理层
对于TDMA 体制的数据链,只要各个端机有一致的时隙结构 (即完成网同步),各个端机明确自己的发射时隙(通信协议),在发射时隙按照规定的消息封装格式 (格式化消息)发送消息,接收机使用跳频跟踪技术完成接收机的同步,那么整个网络就可以正常工作了。通过对Link-16数据链整个工作过程进的描述,提出一种Link-16数据链的分层模型,分层模型更加清晰的对数据链进行描述,而且能直观反映出消息从发射到接收的整个处理流程。
分层模型中的任务层和应用层是预先规定好的一种逻辑,服务层把逻辑消息转换为比特,传输层和网络层根据通信协议对链路层和物理层进行控制,保证整个数据链的正常通信。
本文提出的分层模型不仅适用Link-16数据链,也可以适用其它类型的数据链,为数据链的兼容提供了参考模型。
[1]YIN Yalan.Tactical data link technology and the application in joint operations[M].Beijing:National Defense Industry Press, 2014:47-85 (in Chinese).[尹亚兰.战术数据连技术及在联合作战中的应用 [M].北京:国防工业出版社,2014:47-85.]
[2]LUO Guangming,YANG Bin,QIU Zhihe,et al.Data link[M].Beijing:National Defense Industry Press,2008:54-88(in Chinese). [骆光明,杨斌,邱致和,等.数据链 [M].北京:国防工业出版社,2008:54-88.]
[3]SUN Jiyin,FU Guangyuan,CHE Xiaochun,et al.Tactical data link technology and system [M].Beijing:National Defense Industry Press,2009:116-153 (in Chinese).[孙继银,付光远,车晓春,等.战术数据链技术与系统 [M].北京:国防工业出版社,2009:116-153.]
[4]Wang Longya,Xue Wei,Luo Wuzhong.Model analysis of Link-16based on global grid reference model[J].Computer Science and Network Technology,2011 (2):910-913.
[5]Sanchez IA,Moury G,Weiss H.The CCSDS space data link security protocol[C]//Military Communication Conference,2010:219-224.
[6]Wargo CA,D Arcy JF.Performance of data link communication in surface management operations [C]//Aerospace Conference,2011:1-10.
[7]Zheng Jianguo,Zeng Hui,Yu Dabo.A reference model of data-link application requirements for joint operations [C]//Electric Engineering and Computer,2013:2668-2671.
[8]XUE Dan,ZHAN Shouyi,LI Fengxia.Navigation and location using synchronization mechanism in Link 16 [J].Computer Engineering and Design,2006,27 (12):2273-2278 (in Chinese).[薛丹,战守义,李凤霞.用16号数据链中的同步机制实现导航与定位 [J].计算机工程与设计,2006,27 (12):2373-2278.]
[9]STANAG 5516Edition 3final,NATO standardization agency[S].
[10]ZHENG Jiyu,LIN Jiming.Synchronization theory and technology [M].Beijing:Publishing House of Electronics Industry,2003:239-242 (in Chinese). [郑继禹,林基明.同步理论 与 技 术 [M]. 北 京: 电 子 工 业 出 版 社,2003:239-242.]